一種基于相對位置約束的雙星定位方法
2017-11-20 03:43:52李正張海王偉揚
航空學報 2017年5期
關鍵詞:方法
李正, 張海, 王偉揚
北京航空航天大學 自動化科學與電氣工程學院, 北京 100083
一種基于相對位置約束的雙星定位方法
李正, 張海*, 王偉揚
北京航空航天大學 自動化科學與電氣工程學院, 北京 100083
全球衛星定位系統(GNSS)需要至少4顆衛星才能提供持續、準確的定位結果。在有障礙物遮擋的城市街道、山谷或者存在壓制式干擾的戰場環境中,往往會出現可見星數量降低至4顆以下的情況。針對只有2顆可見星的定位問題,提出了通過相對位置變化對絕對位置進行解算的定位模型,證明了該模型的可行性,并研究了該模型的數值計算方法和幾何搜索方法。仿真實驗和實際跑車試驗表明,在只有2顆可見星條件下,該方法的定位精度明顯優于傳統的INS/GNSS緊組合算法,并且對初始位置的精度不具有依賴性。
全球衛星定位系統; 兩顆可見星; 定位; 相對位置約束; 組合導航
全球衛星定位系統(GNSS)在組合導航[1]、智能交通[2]、大地測量[3]、精密單點定位[4-5]等領域有廣泛的應用。傳統的GNSS定位算法需要4顆可見星才能有效定位[6]。但在城市街區、隧道、山谷以及壓制式干擾等困難環境中,上述條件通常不易滿足[7]。當只有3顆可見星時,通過接收機的海拔高度輔助,以及慣性導航系統(INS)與GNSS組合Kalman濾波的方法能夠獲得較好的定位結果[8]。但可見星只有2顆時,傳統的組合導航濾波器觀測信息不足,濾波結果將隨慣導累積誤差迅速發散[9-10]。
針對2顆星定位問題,文獻[11]提出了一種城市內移動車輛的定位算法,該算法在前一時刻位置已知的前提下,通過測量兩個時刻車輛的直線距離,對當前時刻的位置進行解算。該算法雖然精度較高,但由于是遞推算法,所以對初始位置有較高的精度要求,且車輛在運動過程中不能有明顯的高度變化[11]。文獻[12]通過研究高精度銣原子鐘的誤差模型,在可見星不足的情況下對接收機鐘差進行預測,同時結合高度信息解決2顆星的定位問題。文獻[13-14]提出了在弱信號情況下,通過改進數值計算方法,實現只有2顆可見星的定位方法。但是該方法只能解決單點定位問題,對于運動載體,無法滿足實時性要求。文獻[15-16]等通過設計新的自適應濾波方法,降低只有2顆可見星時的定位誤差,但是在定位原理上仍沒有突破性進展。
針對以上算法存在的不足,本文提出了根據相對位置變化對載體的絕對位置進行解算的方法。該方法對載體的運動模式沒有約束,不依賴于初始位置精度,且定位誤差沒有累積效應。文章的主要內容包含4個方面:首先對基于相對位置約束的兩顆星定位模型進行介紹;第二,對算法的可行性進行了理論分析;第三,給出了定位結果的兩種數值解法;最后通過仿真實驗,驗證算法的有效性和定位精度。
1 定位原理
1.1 基本思想
衛星接收機獲得的偽距信息在地心地固(ECEF)坐標系下一般表述為[17]

(1)
式中:[xyz]T為接收機的位置;[xsyszs]T為衛星位置;δtu為接收機的鐘差。接收機位于以衛星為球心半徑為ρ-δtu的球面上。當有2顆可見星時,如圖1所示,兩球面相交于一空間圓,該圓為接收機位置的可行解軌道。

(2)
由此可推知,在相隔Δt的tk與tk+1兩個時間點上,可以確定如圖2所示的兩個軌道平面。
本文的核心思想在于:如果接收機在Δt時間內的位置變化矢量rk已知,利用rk的起點、終點應分別位于兩個可行解軌道上的約束,使用多個時刻間的位置變化矢量測量,能夠實現對載體位置的有效估計。
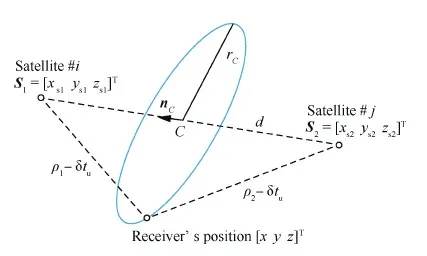
圖1 由2顆可見星確定的可行解 Fig.1 Feasible solution by two visible satellites
圖2 2顆可見星定位的原理圖 Fig.2 Principle diagram of positioning algorithm with two visible satellites
1.2 數學模型
(3)


(4)
式中:Re為地球長半軸;μ為一個與高度測量值相關的因子,其含義與推導過程詳見附錄A。
非線性方程組可記為
FX=b
(5)
式中:X=[x1y1z1δtu1x2y2z2δtu2]T為被估計狀態;b=[ρ11ρ11h1ρ11ρ11h2rk,xrk,yrk,z]T為測量值。考慮測量值存在噪聲,記b對應的噪聲標準差為

(6)
式中:下標ρ、h、r分別表示偽距、高度和位置變化。
采用加權的思想[18],式(3)可進一步轉化為如下最優化問題:
(7)
2 最優解的計算方法
根據本文提出的2顆星定位原理,針對不同情況,采用兩種最優解的計算方法。一是基本的數值解法,二是結合幾何含義的搜索方法。
2.1 數值計算方法
Gauss-Newton迭代算法是解決式(7)所示的最優化問題的基本方法,其迭代公式為
(8)

(9)

rm1=
rm2=

定位過程中,迭代初值通常選擇上一時刻的估計值。
2.2 幾何搜索方法

2.2.1 搜索原理
短時間內接收機的鐘漂可近似為0,即式(3)中δtu1=δtu2。當鐘差為固定值δtu時,可確定圖1 所示的軌道圓,記為Tk。根據高度限制,可將接收機的大致范圍Ls在Tk上標記出來,如圖3 所示。軌道圓半徑極大,在局部區域近似為一條直線。
將rk的終點P在可行解區域Ls上滑動,PL和PH分別為可行解區的左右端點,其起始點D到tk-1時刻的軌道圓Tk-1的最短距離為Δ1。因單一位置變化矢量不能消除鐘差模糊度,進而無法實現位置的準確求解,本文采用多時刻位置變化矢量約束的方式提高精度。

圖3 幾何搜索方法 Fig.3 Searching method by geometric relationships

搜索最優解δtu,P,使得最優解對應的如下代價函數最小:

(10)
圖4為Δi的計算方法:Tk-i為軌道圓,C為圓心,D點為位置變化矢量的起始點,D′為D點在圓軌道平面的投影,則D點到軌道圓的最短距離為DE。
由于C點和D點坐標可求,法向量nC由式(2)給出,故夾角θ可求。由幾何關系可得
(11)
式中:|CD|為C點到D點的線段長度。

圖4 空間點D到軌道圓的最短距離 Fig.4 Minimum distance between point D and the orbit
2.2.2 基于黃金分割的搜索策略
鐘差的搜索區間[δtuL,δtuH]可通過經驗設置,也可以借鑒文獻[12]提供的時鐘模型進行預測。滑動區間Ls則由高度h的取值范圍決定。一般情況下,將高度傳感器的測量誤差視為標準差為σh的零均值白噪聲。利用3σ準則,確定高度的取值范圍為
h∈hL,hH=hm-3σh,hm+3σh
(12)
式中:hm為測量值。根據式(12)可分別求出hL和hH對應的數值解:

(13)
由于軌道圓半徑rC極大,可認為最優點位于PL和PH的連線上。但通過遍歷PLPH線段上每一個采樣點尋找最優解的方法計算量極大。本文采用黃金分割搜索的方法查找最優解。
設第q次搜索區間為aq,bq,計算區間內的兩個試探點,uq,vq∈aq,bq:
(14)
式中:σ=0.618,計算兩個試探點對應的代價函數ΓΔ(uq)和ΓΔ(vq),并比較二者大小。如果ΓΔ(uq)≤ΓΔvq,則說明最優解在aq,vq范圍內,即
(15)
由于黃金分割點的特殊性,uq變為新區間的黃金分割點,即vq+1=uq,所以對于區間aq+1,bq+1只需要計算新的uq+1即可。同理,如果ΓΔuq>ΓΔvq,則
(16)
反復搜索,直到區間長度小于某閾值ε。
用同樣的搜索原理對鐘差進行搜索,即可獲得最終解。雖然嵌套兩層搜索,但是由于鐘漂的穩定性,可根據上一時刻的搜索結果對下一時刻的鐘差取值范圍進行有效約束,從而減少搜索次數。

圖5 本文所提方法流程圖 Fig.5 Flow chart of proposed method
3 對位置變化矢量rk的理論分析
由圖5可知,本文的定位原理依賴于對偽距、高度和位置變化矢量rk的有效測量。偽距和高度信息可由接收機和高度傳感器直接獲得,但rk則無法直接測量。一般情況下,需要通過對速度進行積分獲得。需要指出的是,雖然當速度可測時,可以通過積分計算位置,但積分過程有誤差累計效應,如果tk時刻的位置不準確,tk+1時刻的位置也會隨之發散。此時傳統的積分算法,比如慣導,并不能實現自校正。本節主要證明,即便tk時刻的位置有很大誤差,rk也能獲得較高精度的測量,進而確保本文的算法能夠正常執行,最終將定位精度收斂到合理范圍,防止進一步發散。
3.1 rk的基本計算方法
rk的3個分量是在ECEF坐標系下的坐標,需要通過對地速進行積分,獲得運動載體地理位置(經度λ、緯度L、高度h)的變化,再將地理位置的變化轉化為ECEF坐標的變化。載體在運動過程中,經度、緯度、高度的計算公式為[19]
(17)
式中:λk、Lk、hk分別為tk時刻接收機的經度、緯度、高度;VE、VN、VU分別為載體的東-北-天三向速度;RN、RE分別為子午面曲率半徑和橫向曲率半徑,其計算公式為[20]
(18)
式中:e為地球的偏心率;Re為地球長半軸,地理位置向ECEF坐標系的轉換公式為[21]
(19)
則

(20)
3.2 初始位置未知時rk的計算方法

(21)
根據3顆星定位原理[17],可用牛頓迭代法計算出精度較高的數值解。同時注意到,μ的取值與1近似,且μ=1時式(21)可變形為首一多項式,存在解析解。可將μ=1時的解析解作為牛頓迭代的初值,迭代多次獲得準確的數值解。

GΔX=ν
(22)

(23)

(24)
ΔX=G-1ν
(25)
定位誤差為
(26)
記
(27)
其中:pij為ei與ej的內積,表達式為
(28)
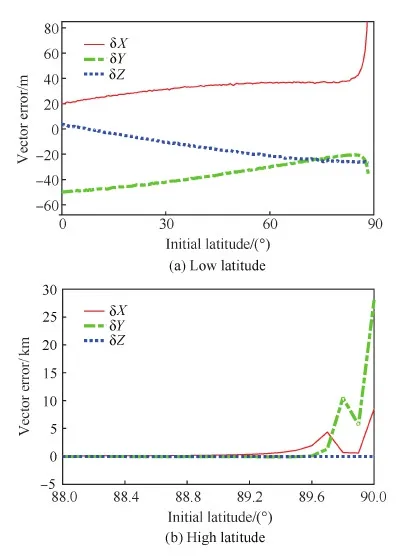
因μ>1(見附錄A),所以1 (29) 從而有 (30) (31) 文獻[22]指出,對于典型的天線,信號增益隨信號入射角的增大而降低。在有遮擋的環境下,信號入射角一般小于60°。從而限定e1、e2與e3的夾角大于120°,進而有 -1≤p13,p23≤-0.5 (32) 而e1與e2的夾角過小時會導致2顆星可辨性差,通常大于15°,結合天線增益的角度限制,易知 -0.5≤p12≤0.966 (33) 根據p13、p23、p33以及p12的取值范圍,可得 (34) 若鐘差為1 000 m,高度測量誤差為10 m,則 (35) 由線性代數的相關知識知,G為以e1、e2和e3為棱的平行六面體的體積,當體積的數量級為100~10-1時,對應的誤差上限為2~20 km。可見由式(21)計算的初始位置,在G較小的情況下將包含較大誤差。但由此計算的rk和最終的定位結果仍可以獲得較好的精度,4.2節對此進行了實例驗證。 3.3 位置變化矢量rk的精度分析 假設1載體的運動范圍為中低緯度地區,即南北緯60° 范圍內。 假設2Δtk時間內,載體的海拔高度、航向、速度等可測,高度測量的噪聲方差最大為200 m2,在航向誤差與速度誤差的綜合作用下,東-北-天三向速度有10-1m/s數量級的穩態誤差。 在以上假設下,本文給出兩個便于工程應用的定性結論,并在附錄B和附錄C中進行詳細證明。 結論1Δtk時間內,經度、緯度、高度的變化在數值上與真值近似,即 (36) 以上分析的是rk的計算精度,其對定位結果的影響較為復雜。但通過大量實驗可以驗證,當tk時刻與tk+1時刻發生換星時,本文定位誤差遠小于rk的計算誤差;如果沒有換星,定位誤差較大,但仍小于rk的計算誤差。 本文首先通過仿真實驗,對提出的方法進行原理性驗證,然后通過實際跑車實驗進一步證明其正確性和有效性。 4.1 仿真實驗 仿真實驗由3部分組成,首先驗證位置變化矢量rk的精度,其次通過實例驗證無先驗知識的rk計算方法的有效性,最后通過與標準的INS/GNSS緊組合算法作對比,驗證定位方法的有效性。 4.1.1 位置變化矢量與初始位置誤差的關系 實驗1飛行器的真實起點為北緯40°,東經116°,高度恒為10 000 m,速度大小恒為400 m/s,航向為北偏東45°,如此飛行60 s,計算對應的位置變化矢量。測速系統存在0.1 m/s的穩態誤差,測速噪聲的標準差為2 m/s,航向測量噪聲的標準差為0.5°,高度測量噪聲的標準差為20 m,采樣頻率為10 Hz。 假設參與計算的起點的經度、緯度同時有Δs的誤差,Δs的取值范圍為[-50,50] km。用蒙特卡羅法仿真1 000次,計算誤差的均值,結果如圖6 所示。從圖中可以看出,位置變化矢量具有將初始位置的大誤差縮小的功能。尤其是在導航過程中,定位誤差一般都在10 km范圍內,對應的位置變化矢量誤差很小,完全能夠滿足2顆星的定位要求。 實驗2與實驗1同樣的運動方式,飛行器真實起點的經度不變,緯度從北緯1°遍歷到北緯90°,參與計算的起點的經度、緯度有固定的10 km 誤差,觀察這固定的10 km誤差在不同緯度造成的位置變化矢量的誤差。用蒙特卡羅法仿真1 000次,計算誤差的均值。圖7(a)反映了低緯度地區的誤差情況。圖7(b)反映了高緯度地區的情況,可以看出,在極地附近,位置變化矢量誤差急速增加。其主要原因在于:根據附錄B中的式(B1)和式(B2),誤差在經度方向上的分量與緯度的正割值成正比。在極地附近,緯度的正割趨于無窮大,所以經度變化的誤差極大,反映在位置變化矢量上,即3個軸的誤差分量很大。由此也可以發現,本文提供的方法,在極地附近可行性較差。 圖6 位置變化矢量誤差與初始位置誤差的關系 Fig.6 Vector error derived from initial position error 圖7 固定的初始位置誤差導致的位置變化矢量誤差 Fig.7 Vector error derived from a fixed initial position error 4.1.2 初始位置未知時rk的計算方法驗證 本文3.2節中提到,初始位置未知時,忽略接收機鐘差,可對初始位置進行近似計算。此處給出一個計算范例。 tk時刻,衛星1與衛星2的空間位置分別為(9 316 492,16 106 224,18 954 148)、(-14 639 082,14 650 041,16 629 515),對應的偽距分別為22 230 740.0、20 819 416.7,tk+1時刻,衛星1與衛星2的空間位置分別為(9 315 716,16 108 506,18 952 588)、(-14 641 190,14 650 256,16 627 468),對應的偽距分別為22 233 593.8,20 807 742.9;tk與tk+1間隔60 s。飛行器初始地理位置為(30°,110°,1 000 m),飛行過程中高度不變,東向與北向速度恒為300 m/s。高度測量噪聲的標準差為20 m,測速系統存在0.1 m/s的穩態誤差,測速噪聲的標準差為2 m/s。鐘差的取值范圍為[0,30] km,以1 000 m為采樣間隔。對每一個采樣點用蒙特卡羅法計算1 000次位置變化矢量,并與真實的位置變化矢量做差,計算3個分量上的均方根誤差。 結果如圖8(a)和圖8(b)所示。其中圖8(a)為在不同鐘差情況下通過式(21)計算的初始位置的均方根誤差(RMSE)。從圖中可以看出,初始位置誤差隨鐘差的增加而增大,且數值較大,單位為km。圖8(b)為在圖8(a)的初始位置誤差基礎上,對位置變化矢量進行計算的誤差結果。從圖中可以看出,雖然位置變化矢量誤差也隨鐘差的增加而增大,但是單位為m,明顯小于初始位置誤差。該試驗表明,2.2節中對沒有先驗知識的位置變化矢量的計算方法是有效的。 圖8 不同鐘差導致的位置變化矢量的均方根誤差以及相應的位置變化矢量的誤差 Fig.8 RMSE of initial position error and vector error derived from different clock error 取鐘差5 000 m的情況,用本文提出的2顆星定位算法,求取接收機位置。由于此時誤差很大,需要反復迭代,不斷更新初始位置,進而逐漸提高定位精度。圖9為迭代8次過程中的定位誤差,從圖中可以看出,定位方法具有一定的收斂性。 圖9 定位誤差與求解次數 Fig.9 Converging positioning error and iteration times 4.1.3 與緊組合的對比實驗 與標準的緊組合算法進行對比,飛行器的運動軌跡及傳感器數據由軌跡發生器生成,運動軌跡如圖10所示。 慣導系統中,陀螺的零偏為1 (°)/h,隨機噪聲為20 (°)/h,加速度計零偏為1 mg,隨機噪聲為20 mg,人為設置可觀測星的數量始終為2。對于本文提出的2顆星定位方法,直接用緊組合的速度輸出作為輔助測速系統,從而計算出位置變化矢量,位置變化矢量的計算時間間隔為60 s。即飛行器飛行60 s以后開始進行解算,前60 s用緊組合的結果代替。 圖10 飛行器運動軌跡 Fig.10 Trajectory of aircraft 根據條件數的變化,本文在條件數較小時直接采用數值解法,當條件數跳變時采用幾何搜索方法。最終的定位誤差如圖12所示。 圖11 條件數 Fig.11 Condition number 圖12 定位誤差 Fig.12 Positioning error 4.2 跑車試驗 為了進一步證明本文所提出方法的正確性和有效性,課題組進行了實際跑車試驗。 4.2.1 試驗條件 試驗采用的硬件平臺為北京航空航天大學和航天恒星科技有限公司聯合研制的ISS/GNSS緊組合原理樣機。其中接收機為載波相位雙頻差分接收機,其單點定位誤差為5 m,速度誤差為0.1 m/s。慣性器件選用美國Crossbow公司生產的IMU440,其主要性能指標如表1 所示。氣壓計設備選用的是MEAS公司生產的數字壓力傳感器MS5803-02BA,該款氣壓計的分辨率高達10 cm、體積小(6.2 mm×6.4 mm)、穩定性高。同時,選用精度更高的組合導航系統IMU-ISA-100C計算跑車試驗的參照值,該系統由NovAtel公司研制,其定位精度可達厘米級。 表1 IMU440 主要性能Table 1 Performance of IMU440 為了實現可見星不足4顆的試驗條件,跑車環境選在建筑物較多的街區。此外,當可見星有3顆時,將信噪比最低的一顆剔除,進而對本文方法進行更有針對性的驗證。 4.2.2 試驗結果 跑車試驗在天津進行,將IMU-ISA-100C系統的輸出作為標準值進行對比,行車軌跡如圖13所示。當可見星足夠多時,用傳統的緊組合算法結果作為輸出;當可見星只有2顆時,切換到本文算法。 跑車試驗持續2 500 s,在[1 944,2 030] s區間段(對應圖13中的時間段1)和[2 217,2 369] s區間段(對應圖13中的時間段2),接收機受建筑物遮擋,可見星數量較少,大部分少于4顆。為了對本文算法進行充分驗證,強制將這兩個時間段的可見星數量設置為2。此外,計算位置矢量的時間設置為30 s,跑車剛進入這兩個時間段時,前30 s仍采用標準的緊組合算法,之后切換到本文方法。 圖13 跑車軌跡 Fig.13 Vehicle trajectory 圖14為2顆星下本文方法與標準緊組合算法的對比結果,其中圖14(a)、圖14(b)分別為時間段1和時間段2的軌跡,圖14(c)為經緯度誤差。從圖中可以看出:本文方法計算的軌跡更接近標準軌跡;本文方法的定位誤差誤差整體上要小于傳統算法,雖波動性較強,但沒有明顯的誤差累計效應。 圖14 對比結果 Fig.14 Comparison results 本文根據相對位置的約束關系,提出了一種新的雙星定位方法。該方法通過測量接收機在空間中的相對位置變化矢量,在高度信息輔助下實現僅有2顆可見星環境下的較高精度定位。該方法的主要特點包括: 1) 對運動載體的運動形式沒有要求,既可以測量高速運動的飛行器,也可以進行單點測量,應用較為廣泛。 2) 誤差沒有累積效應,適合與慣導等其他定位系統進行組合。 3) 不需要初始位置對準,具有較強的靈活性。 4) 只有兩顆低軌道通信衛星,在能獲得偽距和衛星位置的前提下也能實現定位,具有較好的擴展性。 [1] 劉百奇, 房建成. 一種基于可觀測度分析的SINS/GPS自適應反饋校正濾波新方法[J]. 航空學報, 2008, 29(2): 430-436. LIU B Q, FANG J C. A new adaptive feedback Kalman filter based on observability analysis for SINS/GPS[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(2): 430-436 (in Chinese). [2] CHEN W, LI X, SONG X, et al. A novel fusion methodology to bridge GPS outages for land vehicle positioning[J]. Measurement Science and Technology, 2015, 26(7): 075001. [3] 程鵬飛, 文漢江, 孫羅慶, 等. 中國大陸 GPS 速度場的球面小波模型及多尺度特征分析[J]. 測繪學報, 2015, 44(10): 1063-1070. CHENG P F, WEN H J, SUN L Q, et al. The spherical wavelet model and multiscale analysis of characteristics of GPS velocity fields in mainl and china[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(10): 1063-1070 (in Chinese). [4] 劉經南, 葉世榕. GPS非差相位精密單點定位技術探討[J]. 武漢大學學報: 信息科學版, 2002, 27(3): 234-240. LIU J N, YE S R. GPS precise point positioning using undifferenced phase observation[J]. Geomatics and Information Science of Wuhan University, 2002, 27(3): 234-240 (in Chinese). [5] PAN S, CHEN W, JIN X, et al. Real-time PPP based on the coupling estimation of clock bias and orbit error with broadcast ephemeris[J]. Sensors, 2015, 15(7): 17808-17826. [6] CORPORATION A. NAVSTAR GPS space segment/navigation user interfaces[J]. European Journal of Theology, 1991, 24(5): 272. [7] NOURELDIN A, KARAMAT T B, GEORGY J. Fundamentals of inertial navigation, satellite-based positioning and their integration[M]. Berlin: Springer Science & Business Media, 2012. [10] CHEN L, FANG J. A hybrid prediction method for bridging GPS outages in high-precision POS application[J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(6): 1656-1665. [11] HATANO H, KITANI T, FUJII M, et al. Positioning method by two GNSS satellites and distance sensor in urban area[J]. IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, 2015, 98(1): 275-283. [12] YEN S W, VAN GRAAS F, DE HAAG M U. Positioning with two satellites and known receiver clock, barometric pressure and radar elevation[J]. GPS Solutions, 2015, 101(12): 1-15. [13] LI J Z. Two satellites positioning algorithm based on AGPS system with two clock bias[C]//2010 2nd International Conference on Computer Engineering and Technology (ICCET), 2010, 2: V2-416-V2-419. [14] 李吉忠, 武穆清, 李筱葉. 利用Marquardt算法進行兩顆衛星的AGPS定位[J]. 北京郵電大學學報, 2009, 32(2): 39-42. LI J Z, WU M Q, LI X Y. Two satellites positioning method of AGPS with Marquardt algorithm[J]. Journal of Beijing University of Posts & Telecommunications, 2009, 32(2): 39-41. [15] ZHOU Q, ZHANG H, LI Y, et al. An adaptive low-cost GNSS/MEMS-IMU tightly-coupled integration system with aiding measurement in a GNSS signal-challenged environment[J]. Sensors, 2015, 15(9): 23953-23982. [16] ZHANG B Q, CHU H R, SUN T, et al. Error prediction for SINS/GPS after GPS outage based on hybrid KF-UKF[J]. Mathematical Problems in Engineering, 2015(4):1-9. [17] 孫健. GPS和高精度氣壓高度表的組合導航定位技術研究[D]. 南京: 南京航空航天大學, 2008. SUN J. Research on GPS and high precision baro-altimeter integrated navigation and positioning technology[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008 (in Chinese). [18] SIMON D. Optimal state estimation: Kalman, H infinity, and nonlinear approaches[M]. New York: John Wiley & Sons, 2006: 82. [19] ROBERT M R. Applied mathematics in integrated navigation systems[M]. 3rd ed. Reston: AIAA, 2007: 75. [20] DAVID H T, JOHN L W. 捷聯慣性導航技術[M]. 張天光, 王秀萍, 王麗霞, 等譯. 北京: 國防工業出版社, 2007: 34. DAVID H T, JOHN L W. Strapdown inertia navigation technology[M]. ZHANG T G, WANG X P, WANG L X, et al. translated. Beijing: National Defense Industry Press, 2007: 34 (in Chinese). [21] 謝剛. GPS原理與接收機設計[M]. 北京: 電子工業出版社, 2009: 108. XIE G. Principles of GPS and receiver designs[M]. Beijing: Publishing House of Electronics Industry, 2009: 108 (in Chinese). [22] PAUL D G. GNSS與慣性及多傳感器組合導航系統原理[M]. 李濤, 練軍想, 曹聚亮, 等譯. 北京: 國防工業出版社, 2011: 185. PAUL D G. Principles of GNSS, inertia and multisenso integrated navigation systems[M]. LI T, LIAN J X, CAO J L, et al., translated. Beijing: National Defense Industry Press, 2011: 185 (in Chinese). 附錄A 當接收機的海拔高度確定以后,其位置滿足式(A1)所示的橢球面方程[18]: (A1) 式中:Re和Rp分別表示地球的長半軸與短半軸。對式(A1)變形為 (A2) 設傳感器測量的海拔高度為hc,則 (A3) 顯然 h-hc?Re+hc,h-hc?Rp+hc (A4) 所以 (A5) 故式(A2)可寫為 (A6) (A7) 附錄B 將地球的長半軸Re簡記為R。設初始位置誤差為δs(單位為m),其導致的最大的經度和緯度誤差分別為 (B1) 因δs?RE+h,δs?RN+h,所以δL為小量。secL為關于緯度的單調遞增函數,在本文3.3節中的假設條件下,secL≤2,所以δλ亦為小量。由式(17)可知,經、緯度的變化方程為 (B2) 式中:δVE、δVN為東向速度與北向速度的測量誤差。同時,求中RE、RN對L的導數為 (B3) 1) 經度計算通道 式(B2)中Δλk計算通道的被積函數可寫為 (B4) 將其按照a/x+δx的形式進行Taylor展開,可得 Iλ≈ (B5) 式中: (B6) 代入式(B3),并進行整理,易知 Iλ≈ (B7) 而 secLr+δL≈secLr+tanLr·secLr·δL (B8) 將式(B7)、式(B8)代入式(B2)中的經度計算通道: (B9) 展開可得 Δλk≈ (B10) 由式(B10)可知,經度變化誤差由兩部分組成,一是速度測量誤差導致的誤差項,二是初始位置誤差導致的誤差項。其中,速度誤差滿足假設2 條件,所以 (B11) 此外,δL為小量,且載體的運動范圍在中低緯度地區,故 VE+δVEtanLr·secLr·δL?VEsecLr (B12) 所以初始位置誤差導致的誤差項滿足: (B13) 2) 緯度和高度計算通道 式(B2)中緯度計算通道的被積函數與式(B4)類似,即 (B14) (B15) 此外,由于高度通道不參與積分計算,直接通過氣壓高度表等傳感器進行測量,所以也滿足: (B16) 附錄C (C1) (C2) (C3) 考慮初始位置與真值的關系: 進而有 (C4) 1) δr的x分量 (C5) 而 (C6) (C7) (C8) 故 cosLcosλ·Δh·δh (C9) 式(C9)可簡寫為 (C10) eλ項: Δλ·δλ≈-R+hcosLsinλ· (C11) 式中:δs為初始位置誤差,假設在10 km范圍內;Δλ表示運動載體在短時間內的經度變化,通常也在10 km范圍內,所以 (C12) 當h為0時,誤差最大,故有 (C13) eL項: (C14) 所以 (C15) 式中: (C16) 其中: (C17) 所以: (C18) 進而: ΔL·δL (C19) 飛行器的飛行高度通常在100 km以內,所以 h<100 km≤0.016R (C20) 同時有 (C21) 所以 (C22) 根據式(C19)~式(C22)計算的各變量取值范圍,可得 (C23) 式中:Δs為Δt時間內載體在緯度方向上的變化,一般滿足Δs<10 km,δs為初始誤差在緯度方向上的大小,本文假設在10 km范圍內,則 (C24) 此外,高精度的高度傳感器,其測量噪聲的方差可達200 m2,所以 (C25) 2) δr的y分量 結果同δr的x分量。 3) δr的z分量 分析方法同δr的x分量,這里給出主要分析過程。 (C26) eL項: (C27) 其中: (C28) (C29) (C30) 而 (C31) (C32) (C33) 所以 1.010 3R+h<1.017R+h (C34) 即 eL<1.017R+h·ΔL·δL (C35) 結果同式(C19)。 而高精度的高度傳感器,其測量噪聲的方差在200 m2以內,所以 (C36) 綜上所述,位置變化矢量的誤差可控制在300 m范圍內。 (責任編輯: 蘇磊) URL:www.cnki.net/kcms/detail/11.1929.V.20170213.1146.002.html Apositioningmethodwithtwosatellitesbyrelativepositionconstraint LIZheng,ZHANGHai*,WANGWeiyang SchoolofAutomationScienceandEngineering,BeihangUniversity,Beijing100083,China Theglobalnavigationsatellitessystem(GNSS)needsatleastfourvisiblesatellitestoprovideaccurateandcontinuouspositingresult.However,underharshconditionssuchasurbancanyon,tunnelsandotherspecialenvironments,thenumberofvisiblesatellitesusuallybecomeslessthanfour,whichleadstodegradationofpositioningprecisionorinfeasibilityofthepositioningalgorithm.Thispaperpresentsanovelmethodtoprovidereliablepositionsolutionwithonlytwovisiblesatellites.TherelativepositionchangeduringashortperiodisutilizedasaconstrainconditiontoestimatetheabsolutepositionofGNSSreceiverinthispaper.Thefeasibilityoftheproposedmethodisproved.Thenumericalalgorithmandgeometricalsearchingalgorithmareproposedrespectively.Thesimulationexperimenthasbeencarriedoutandtheresultdemonstratesthattheproposedmethodiseffectiveinimprovingthepositioningperformance.TheproposedmethodhasbetterperformancethantheconventionalINS/GNSScoupledmethodandthepositioningresultsdonotrelyontheinitialposition’sprecision. GNSS;twovisiblesatellites;positioning;relativepositionconstraint;integratednavigation 2016-06-07;Revised2016-11-09;Accepted2017-01-09;Publishedonline2017-02-131146 .E-mailzhanghai@buaa.edu.cn 2016-06-07;退修日期2016-11-09;錄用日期2017-01-08; < class="emphasis_bold">網絡出版時間 時間:2017-02-131146 www.cnki.net/kcms/detail/11.1929.V.20170213.1146.002.html .E-mailzhanghai@buaa.edu.cn 李正, 張海, 王偉揚. 一種基于相對位置約束的雙星定位方法J. 航空學報,2017,38(5):320503.LIZ,ZHANGH,WANGWY.ApositioningmethodwithtwosatellitesbyrelativepositionconstraintJ.ActaAeronauticaetAstronauticaSinica,2017,38(5):320503. http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn 10.7527/S1000-6893.2017.320503 V241.62+5 A 1000-6893(2017)05-320503-15





4 實驗驗證










5 結 論

































猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56