面向柵格模型的室內環境地圖構建方法
2017-11-22 07:28:27朱濤黎恒明唐新科尚大帥
現代計算機 2017年29期
朱濤,黎恒明,唐新科,尚大帥
(西安測繪總站,西安710054)
面向柵格模型的室內環境地圖構建方法
朱濤,黎恒明,唐新科,尚大帥
(西安測繪總站,西安710054)
針對室內未知環境地圖構建問題,通過Kinect傳感器獲取障礙物深度圖像信息,采用基于Bayesian的概率柵格計算方法,實現室內環境下的實時地圖構建,并通過移動機器人平臺驗證其有效性和準確性。
0 引言
隨著人工智能技術日趨成熟,機器人得到越來越廣泛應用。移動機器人在未知環境中自主完成任務,需要不斷感知周圍的環境信息,進行定位、避障和路徑規劃,從而到達目標位置[1]。然而在室內未知環境中,移動機器人無法直接獲取GPS等位置信息進行定位導航,需要借助傳感器建立外部空間的空間模型,即地圖構建[2]。本文針對室內未知環境地圖構建問題,通過在移動機器人平臺上搭載Kinect傳感器,采用面向柵格模型的地圖構建方法有效解決了信息不確定性問題,對室內工作環境進行準確描述和表達。
1 基于Bayesian的概率柵格地圖
概率柵格地圖的建立是根據測距傳感器的觀測值來計算每個柵格被占據的概率值得到的[3]。由于移動機器人地圖創建存在傳感器噪聲、定位精度、累積誤差等不確定性因素,這些不確定性因素復雜且難以處理,需要用概率來表示柵格地圖中每個柵格被障礙物占據的可能性,建立明確的概率算法模型來解決問題。
定義柵格單元是一個在連續空間坐標集合的離散狀態隨機過程,每個柵格單元具有占據和空閑的離散隨機變量。設mx,y∈[OCC,EMP]表示位于柵格Mx,y的狀態,其中OCC表示柵格處于被占據的狀態,EMP表示柵格處于空閑狀態。設定zt表示t時刻的觀測值,(zt,zt-1,???,z1)表示一系列觀測值且各觀測值相互獨立。根據Bayesian規則可得:

根據式(1)可以得到觀測值為zt時的柵格占據概率為(2)。

其中,P(zt|mx,y=OCC)、P(zt|mx,y=EMP)由傳感器模型得到,P(mx,y=OCC)和P(mx,y=EMP)是先驗概率。
對于不同時刻同一傳感器或者同一時刻不同傳感器的占據概率,可以用Bayesian公式加以融合,可得式(3):

2 Kinect傳感器模型
Kinect是微軟公司于2010年6月推出的一款基于體感的人機交互設備,由彩色攝像頭、紅外攝像頭、紅外投影機、麥克風陣列、馬達、邏輯電路和USB線纜等部分構成[4],如圖1所示。Kinect的視場是金字塔形狀的,有效視野范圍水平方向為57度,垂直方向為43度,有效探測范圍約為0.8~4.0米,可以獲取彩色圖像數據、深度圖像數據、音頻數據以及骨架數據。

圖1 Kinect傳感器
在真實世界坐標系中,以Kinect設備為坐標原點,用右手坐標系表示X軸、Y軸和Z軸,以毫米為單位。在深度圖像投影坐標系中,以圖像的左上角為坐標原點,u軸平行于圖像行掃描線指向右,v軸沿圖像列方向指向下。根據Kinect深度攝像頭標定,可得到X、Y、Z坐標分別為:

其中,X、Y、Z分別表示真實世界坐標系中的坐標,u、v表示深度圖像橫、縱坐標,u0、v0為深度圖像中心坐標,deptu(u,v)表示深度值,f表示焦距。
3 實時地圖構建
3.1 局部柵格地圖的建立
建立環境坐標系模型之后,需要將Kinect獲取的數據轉換為用二維數組表示的柵格地圖,即建立局部柵格地圖[5]。Kinect可視范圍約為4m×4.4m的區域,可按照每個柵格5cm×5cm的方格進行劃分。設定柵格化區域分為確定區域和不確定區域,其中確定區域為環境信息映射到柵格地圖中表示為占據或者空閑的柵格區域。在地圖創建初始化狀態下,整個柵格地圖都屬于不確定區域。
(1)將Kinect獲取的環境信息映射到柵格地圖上。將Kinect探測到的環境信息用二維笛卡爾矩形柵格來表示,用二維數組Map[x][y]來記錄對應柵格是否有障礙物信息。將障礙物位置信息映射到環境地圖中對應的柵格單元,可表示為:

其中,(x,y)表示障礙柵格在全局坐標中的位置信息,(xw,yw)表示障礙物在世界坐標中的位置,w為柵格的寬度。
(2)計算地圖中柵格的占據或者空閑概率。首先將整個地圖的所有柵格的初始化值賦值為0.5,以表示不確定狀態。然后在給定各個柵格單元先驗概率的條件下,k時刻依據Kinect觀測值計算每個柵格中的占有概率,并記錄給定柵格的占據概率。最后根據閾值判斷柵格是否被占據或者空閑,如下所示:

(3)對局部柵格地圖所有柵格賦值,生成當前幀對應的局部柵格地圖。
3.2 全局地圖的更新
由于Kinect采集的環境信息為局部柵格地圖信息,這就需要將局部地圖更新到全局地圖。通過坐標變換公式,就可以將局部地圖映射到全局地圖中。本文采用融合算法對全局地圖進行更新,如下所示:

其中,Mi+1表示第i+1步融合后的全局地圖,Mi表示第i步已經存在的全局地圖,mi+1表示新構建的局部地圖。
在全局柵格地圖中,存在部分區域柵格信息不確定或者已經更新,對于不確定區域的柵格可直接進行更新,而已經更新的柵格則進行數據融合。在全局柵格地圖更新過程中,本文采用Bayesian法則進行數據融合,以得到相對準確的概率結果,信息融合公式如公式(8)。
4 試驗結果與分析
如圖2所示,實驗環境選擇在走廊中,走廊寬度為2.06m。移動機器人在走廊里以10cm/s的速度沿直線向前運動,借助傳感器Kinect掃描前方環境。對實時采集的數據流間隔5s提取一幀圖像,將檢測到的障礙物信息投影到坐標系中繪制成柵格地圖,從而獲取整個實驗環境的全局地圖。


圖2 移動機器人運動時的實驗環境
在不考慮機器人運動累計誤差和自定位誤差的情況下,其實驗結果如圖3所示,障礙柵格用黑色表示,無障礙柵格用白色表示,不確定區域用灰色柵格表示。矩形框表示移動機器人所在的位置。
從上圖可以看出,當移動機器人在走廊中間沿直線勻速行進時,間隔5s提取一幀圖像,共提取9幀圖像連接成全局柵格地圖,能夠將走廊中的墻壁、門等環境特征完整、準確地繪制到地圖中。通過真實環境與柵格地圖的對比,可以看出地圖精度和環境特征位置與實際環境比較接近。但是,柵格地圖下半部分中繪制的門比實際要寬幾個柵格,走廊也會出現沿Y軸(即小車行進方向的法方向)出現有規律、對稱的上下移動一兩個柵格的情況。這是情況產生的原因除前一實驗分析的原因外,主要是由于運動過程出
現抖動、側滑等現象導致移動機器人出現位姿偏差。
為了測試機器人運動狀態時構建的柵格地圖精度,需要將真實環境與柵格地圖進行對比,即真實環境中的坐標與柵格地圖中的坐標進行誤差分析。然而將真實環境中所有坐標與地圖中的位置一一對比是不可能的,可選取若干比較穩定的參考點進行對比。由表1可知,真實柵格位置與地圖中的柵格位置比較接近,參考點的真實坐標與地圖中的坐標相差不大,誤差不超過70mm,滿足實驗的要求。
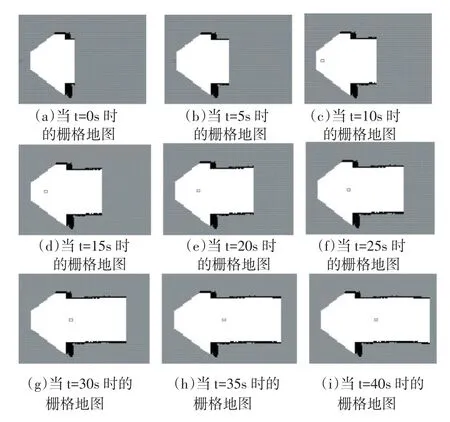
圖3 移動機器人運動時的地圖構建
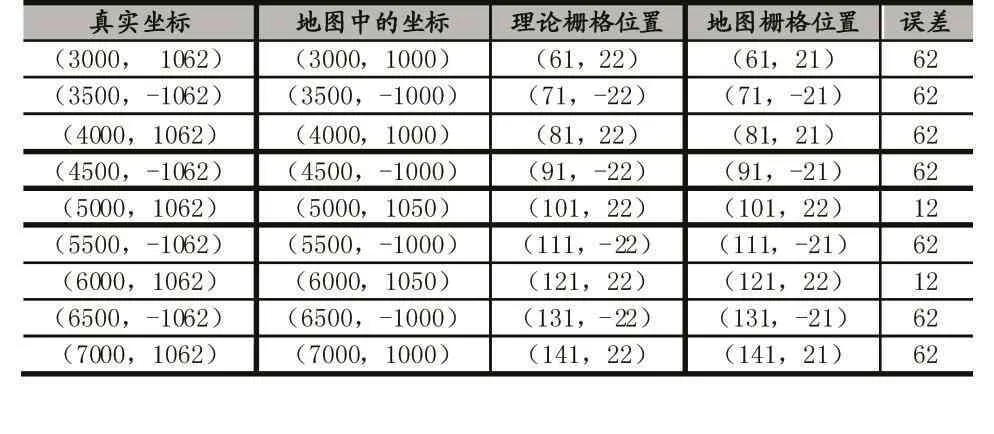
表1 移動機器人運動時的柵格地圖精度
[1]楊學.一種人機交互式室內建模方法[J].軟件導刊,2015(08).
[2]段華旭,閆飛,莊嚴,樸春光.無人車基于雙目視覺的同時定位與地圖構建[J].華中科技大學學報(自然科學版),2015(S1).
[3]黨鵬飛.移動機器人同時定位與地圖構建[D].沈陽:東北大學,2010.
[4]Erica Naone.Microsoft Kinect:How the Device Can Respond to Your Voice and Gestures[Z].Pioneering with Science and Technology,2011,4(04):82-83.
[5]孫學敏.室內未知環境下移動機器人地圖創建方法的研究[D].沈陽:東北師范大學,2012.
朱濤(1989-),男,碩士,助理工程師,研究方向為攝影測量與遙感
黎恒明(1965-),男,本科,高級工程師,研究方向為目標判讀與解譯
唐新科(1990-),男,本科,助理工程師,研究方向為攝影測量與遙感
Grid Model;Map Building;Grid Map;Kinect
The Method of Map Building Under the Indoor Environment Facing the Grid Model
ZHU Tao,LI Heng-min,TANG Xin-ke,SHANG Da-shai
(The Xi'an Surveying and Mapping Technological Center,Xi'an 710054)
Aiming at the problem of indoor and unknown environment map building,obtains the information of obstacle depth image by the Kinect sen?sor,and uses the computational methods of probability grid based on the Bayesian to extract real-time map building under the indoor envi?ronment.With the platform of mobile robot,tests the accuracy and validity.
柵格模型;地圖構建;柵格地圖;Kinect
1007-1423(2017)29-0074-04
10.3969/j.issn.1007-1423.2017.29.018
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
制造技術與機床(2017年3期)2017-06-23 08:11:21
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19