基于體感控制的撲翼飛行器
2017-11-27 19:16:13章逸凡王源杰倪博文陳恒關帥
物聯網技術 2017年11期
章逸凡+王源杰+倪博文+陳恒+關帥


摘 要:文中設計了一款基于體感控制的撲翼飛行器。該飛行器利用操縱者手部的變化實現對飛行器姿態的控制,利用頭部運動實現觀察視角的控制,使操縱者能夠更為有效的體驗真實飛行的感覺。此外,該飛行器還能夠模仿鳥類的飛行運動模式,具有仿生性好、高效節能等特點,可用于驅鳥、巡邏等領域,具有廣闊的市場前景。
關鍵詞:體感控制;撲翼
1 作品簡介
本項目旨在開發并推廣一種基于體感控制的撲翼飛行器,文中設計的飛行器摒棄常用的遙控手柄控制,利用操縱者手部的變化實現對飛行器姿態的控制,利用頭部運動實現觀察視角的控制,使操縱者能夠更為有效的體驗真實飛行的感覺。飛行器采用撲翼結構,能夠有效模仿鳥類的飛行運動模式,具有仿生性好、高效節能等特點。
該項目市場前景廣闊,能夠有效用于機場驅鳥、安保監控等領域,具有較高的商業價值。它利用機翼關節的上下撲動產生升力實現飛行。其所具有的仿生性兼具靈活性是其他無人機很難做到的,更重要的是,針對該無人機的成熟產品尚未在市場中普及,因此更易在市場中立足,且該飛行器融入了當今炙手可熱的體感控制與VR控制技術,設計新穎,具有極大的市場擴展前景。實物如圖1所示。
1.1 結構設計
分析了不同驅動結構的優缺點,并進行計算與仿真,最終確定使用雙曲柄搖桿機構進行傳動,結構如圖2所示。
1.2 手勢信號的解讀與分析
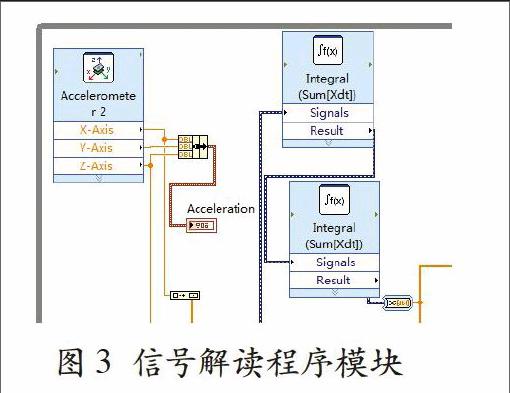
利用放置在手上的加速度傳感器實現對不同動作加速度信號的采集與分析,將快速變化的加速度信號通過雙重積分和相應運算轉變成漸變的相對位移信號,實現了對撲翼頻率、轉向角度、俯仰角度的手勢控制。利用特定方向的信號功率譜分析實現特定指令信號的識別,以進行相應的控制操作,例如從起飛模式切換至巡航模式的控制。信號解讀程序模塊如圖3所示。
1.3 飛行器控制與通訊
撲翼飛行器主要包括三種運動的控制,分別為撲翼的頻率,決定著飛行器的飛行速度與飛行狀態;尾翼左右轉向角度,決定著飛行器的轉彎半徑;尾翼的俯仰角度,決定著整個機體的俯仰角度。而我們相應的肢體動作就是為了分別實現這三個運動的單獨控制。
為了將手部采集的信號傳送至電腦進行分析并最終控制飛行器,我們采用圖4所示的總體通訊模式。
為了更好地顯示飛行控制狀態,我們設計了相應的控制顯示面板,該部分與之前的信號采集分析部分都基于LabView平臺進行設計,其既與控制模塊有較好的兼容性,也具備美觀的UI界面編輯能力。為了增加該飛行器操作的便攜性,我們也開發了一款能夠在移動設備上使用的控制界面(如IPAD),可以實時顯示飛行器的飛行狀態,控制面板如圖5所示。
2 創新點
(1)擺脫了傳統遙控器操控的飛行器控制模式,利用安裝在手部的傳感器實現對不同手勢的區分與解讀,并控制相應的飛行姿態。
(2)對撲翼飛行器的結構進行設計與優化,采用仿生尾翼設計,提高了飛機的機動性。
(3)結合VR技術,令用戶可以以鳥的視角進行控制,體驗沉浸式交互。
3 市場前景
“飛鴻”飛行器從原理上規避了與旋翼機的同類競爭,相較傳統的固定翼與旋翼飛行器,撲翼具有極高的飛行效率與極低的噪音,在很大飛行速度范圍內具有高機動性。撲翼機外形酷似生物,易于混入生物群體,或本身可組成群體,偽裝成鳥群,難被發現或探測。撲翼無人機可以攜帶偵察設備與武器作為單兵偵察與攻擊平臺。可進行特殊偵察,作為信號中繼站等;鳥型撲翼機可以偽裝為猛禽的造型,輔以聲音,高效完成機場附近的驅鳥工作;撲翼機輕便,容易折疊攜帶,安全穩定起降對場地依賴小。“飛鴻”撲翼無人機市場主要定位于無害化驅鳥和隱身化巡邏,具有廣闊的市場前景。endprint
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
