高亮度下近紅外激光散斑投射的輪廓測量
2017-11-29 13:31:13張桁維徐勁瀾孟繁昌劉烈金
中國測試 2017年11期
梁 晉,梁 瑜,張桁維,徐勁瀾,孟繁昌,尤 威,劉烈金
(西安交通大學機械工程學院 機械制造系統工程國家重點實驗室,陜西 西安 710049)
高亮度下近紅外激光散斑投射的輪廓測量
梁 晉,梁 瑜,張桁維,徐勁瀾,孟繁昌,尤 威,劉烈金
(西安交通大學機械工程學院 機械制造系統工程國家重點實驗室,陜西 西安 710049)
為實現在高亮度條件下模型外形輪廓的測量,首先在計算機上生成隨機矢量化散斑圖案,并用激光雕刻技術制成散斑片作為散斑投射模板,采用光波為850nm的VCSEL激光器作為投射光源并制成激光散斑投射器。在高亮度條件下,通過給相機加裝窄帶濾光鏡實現散斑圖像的清晰獲取,最后基于數字圖像相關法完成圖像的立體匹配并最終解算出模型點云。實驗表明:該方法在20400lx條件下仍然可以實現模型的外形輪廓測量,且標準球測量結果相對偏差為0.0384%;應用近紅外激光散斑投射并給相機加裝窄帶濾光鏡可有效減少干擾光影響,可以在高亮度條件下完成模型輪廓的精準測量。
輪廓測量;數字圖像相關法;散斑;近紅外激光
0 引 言
基于結構光的計算機視覺是光學測量的一個重要分支,它是將一定模式的光投射到被測物體表面,通過分析圖案在物體上的變形,應用數學模型來求取物體的三維信息[1]。這是一種主動式給待測物體投射標記點的方法,通常可分為點結構光、線結構光和面結構光,由于面結構光在輪廓測量具有很高的效率,近年來得到快速發展和廣泛應用。其中Li等[2-3]對結構光法進行了深入研究,除了結構光法以外,Malowany等[4]應用激光測距的方法對鍋爐實現了幾何模型測量,Umemoto等[5]應用莫爾條紋的方法實現了混凝土的表面測量,Li等[6-7]采用相移法進行輪廓測量。而在特殊環境下的模型輪廓測量,如在高亮度條件下,往往無法采集到清晰且帶有特征圖案的圖像,所以無法正常解算模型點云。激光掃描用于輪廓測量主要體現在地形、地貌和建筑物測量[8-9],而對工業產品的輪廓測量主要針對的是室內較為理想的場合,而在復雜光照條件下的輪廓測量目前還少有研究。
本文結合雙目立體視覺[10-11]和數字圖像相關法[12-13],設計并實現了近紅外激光散斑投射測量系統,利用窄帶濾光鏡的透光特性來最大程度地消除干擾光的影響,從而實現了高亮度條件下的模型輪廓測量。該散斑投射測量系統體積小、便攜,測量速度快,具有潛在的應用價值。
1 關鍵技術
1.1 隨機矢量化散斑圖案生成
紅外激光散斑主動投射器需要一個散斑模板,即散斑片。首先在計算機上生成散斑矢量圖,使用激光雕刻制成透光散斑模板,計算機設計矢量化散斑包括4步:
1)設置光源
在圖像范圍內,隨機放置N個虛擬光源,整個圖像范圍內所有區域均受到該光源的影響,光源強度和位置隨機,如圖1(a)所示。
2)生成灰度圖像
圖像中每個像素點的灰度值受所有光源影響,其計算公式為

式中:g(x,y)——像素灰度值;
Ki——每個光源的亮度(0~255隨機數);
(sxi,syi)——每個光源的坐標位置(隨機數);
σ——光強因子(1~10間取值)。
為了得到像素級的隨機散斑,光源個數N一般取圖像寬度的2~3倍,且最終的灰度值必須進行歸一化處理使之介于0~255之間,生成的灰度圖像如圖 1(b)所示。
3)圖像二值化
對生成的灰度圖像進行二值化處理,即圖像中大于128的像素點灰度值置為255,其余像素點灰度值置為0,可得到黑白兩色的二值化圖像,如圖1(c)所示。
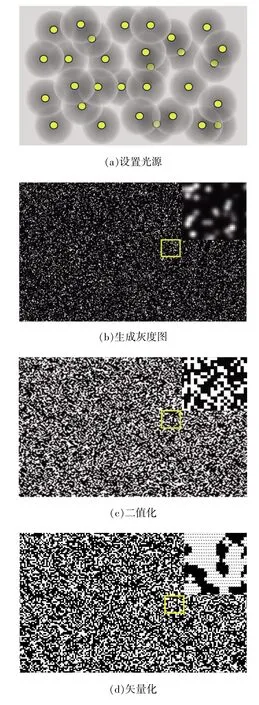
圖1 矢量散斑生成流程
4)矢量化
對二值化圖像進行逐行掃描,將所有連同的白色區域連接為矩形單元,最終整幅矢量圖由H(圖像高度)層微小矩形堆積而成,如圖1(d)所示。
隨機矢量化散斑圖像繪制完成后,選用玻璃鏡片通過激光刻蝕雕刻制成透光散斑片,將其作為激光散斑投射的模板。
1.2 近紅外激光散斑投射器
投射器的作用是將精細的散斑圖案投射到模型表面,激光器發光透過擴散鏡和聚焦鏡最后通過特制的散斑片將散斑圖案投射出去,鏡頭調焦使投射到模型表面的散斑圖案是清晰可見的,圖2為投射光路示意圖。
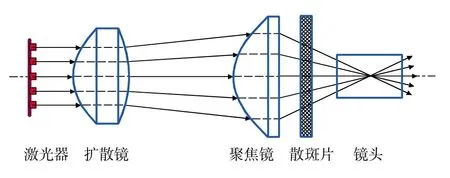
圖2 投射光路示意圖
模型輪廓測量的前提是能夠獲得清晰的散斑圖像,在干擾光影響嚴重的情況下,選擇的光源需要有高亮度和抗干擾性。考慮到垂直腔面發射激光器(VCSEL)具有單位面積功率高、抗干擾性強、光波單一等優點,最終選用激光器品牌為PRINCETON OPTRONICS,型號為Part#PCW-SMV-2-W0850,其輸出功率為2W,波長為(850±10)nm。圖3為最終組裝成的投射器實物,與1角錢硬幣相比較,可見投射器體積很小。

圖3 投射器實物
1.3 數字圖像相關法的立體匹配
雙目立體視覺原理與人類雙目視覺的立體感知類似,通過兩個視點觀察同一個物體得到兩個視角下的圖像,計算不同圖像同一視點的視差來獲取物體的三維形貌,在光學測量具有廣泛應用。在這過程中,尋找兩幅圖像公共點即立體匹配是非常重要的一項工作,本文基于數字圖像相關法完成圖像匹配。
數字圖像相關法(digital image correlation,DIC)是通過對物體變形前后的兩幅圖像進行相關計算來求取物體位移及變形的方法。其中的相關計算就是求取兩幅圖像中的對應點,即立體匹配。對于輪廓測量,對同一瞬態兩個相機拍攝的圖像進行相關計算。如圖4所示,其中左側是相機1的圖像,右側是相機2的圖像。在相機1的圖像中,取待匹配點C為中心(2M+1)×(2M+1)(M為大于 0 的自然數,通常取值在[7,10]之間)大小的矩形圖像作為參考子圖像,即為選取的種子點。在相機2的圖像中,通過一定的搜索方法,按照預先定義的相關系數進行相關計算,尋找與參考子圖像相似度最大的以C′為中心的目標子圖像,則C′即為C點在圖像2中的對應點。
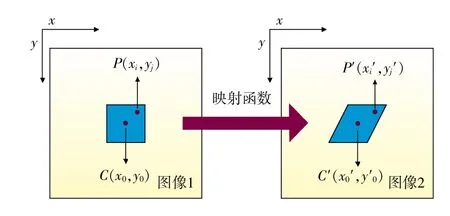
圖4 數字圖像法原理
相關系數是表征兩個圖像子區相似程度的數學度量,數字圖像相關法通過求取相關系數的極值來完成圖像匹配,本文采用一種引入線性光強變化模型的最小距離平方和系數[14]:
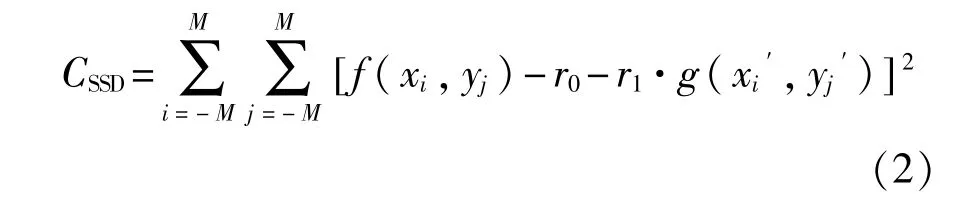
其中r0和r1用于補償由于光照和相機光圈差異引起的灰度線性變化,該相關系數具有良好的抗干擾能力,進行圖像匹配時的誤匹配概率較小。
2 系統方案總體設計與實現
基于上述理論研究,本文設計并實現近紅外激光散斑投射測量系統。系統工作流程如圖5所示,圖6為觸發信號示意圖。首先由計算機發出觸發信號,激光器發光瞬間光線通過特制的散斑片將散斑圖案投射到模型表面,與此同時雙相機同步采集圖像,基于數字圖像相關法完成圖像匹配并最終解算出模型點云。激光器發出的紅外光的波長為(850±10)nm,環境光及干擾光絕大多數都不屬于850 nm附近的光波,通過給相機鏡頭加裝850nm的窄帶濾光鏡,可以只允許850nm附近的光波進入相機,從而有效消除環境光及干擾光對測量的影響。窄帶濾光鏡的中心波長為(850±10)nm,峰值透過率T>80%。
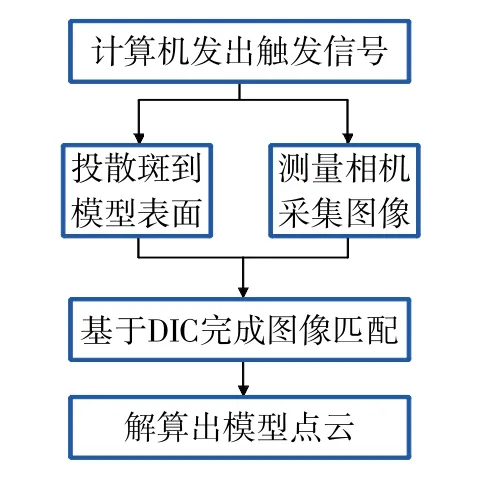
圖5 系統工作流程
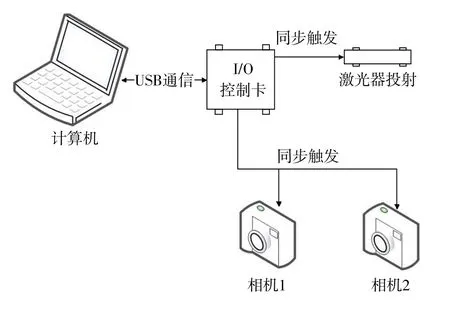
圖6 觸發信號示意圖
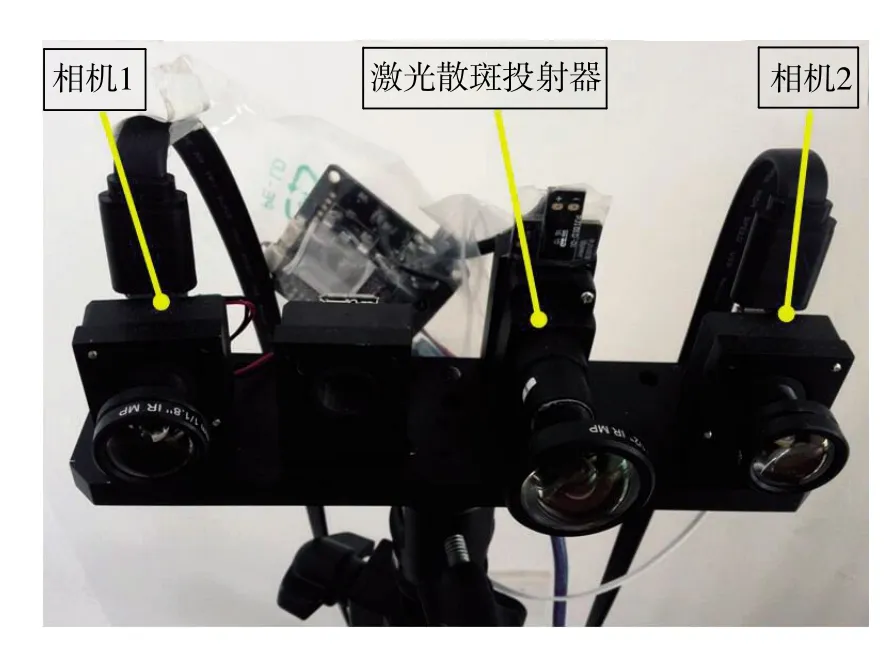
圖7 測量頭實物
設計系統測量幅面為200mm×150mm,相機選用dart紅外相機,分辨率為1 280×960,相元尺寸為3.75μm,相機間距為150 mm,測量距離為300 mm,設計并搭建相關硬件支架,測量頭實物如圖7所示。
3 實驗研究
3.1 高亮度輪廓測量
使用高功率LED燈創造不同亮度條件,用照度儀檢測被測對象附近區域亮度。分別使用不加裝窄帶濾光鏡的相機和加裝窄帶濾光鏡的相機進行圖像采集,最后用采集到的圖像進行比對測試和點云解算。為防止反光對測量的影響,將金屬質被測對象做顯影劑噴涂處理,由于激光波長為不可見的紅外光,所以被測對象色澤對測量不產生影響。
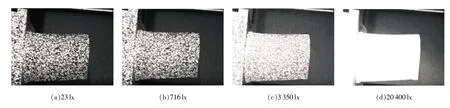
圖8 未加濾鏡片采集到的圖像
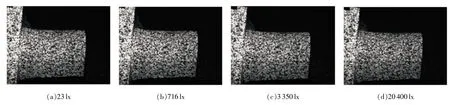
圖9 加濾光鏡采集到的圖像
使用LED燈創造4個不同亮度,分別為23,716,3 350,20 400 lx,圖8為在不同亮度條件下,相機不加裝850nm窄帶濾光鏡采集到的圖像,圖9為加裝850nm窄帶濾光鏡采集得到的圖像。用采集到的圖像在相同的條件下進行點云解算,得到的點云數量統計如表1所示,其中圖10為在照度為20 400 lx時,給相機加裝濾光鏡的條件下解算得到的點云數量。

表1 點云解算數量統計

圖10 20400lx時解算得到的點云
由上述實驗可知,在相機未加裝850nm窄帶濾光鏡時,隨著亮度的增加,散斑圖案逐漸不清晰,圖像灰度分布趨于全白(灰度值為255),在3350 lx時散斑特征明顯減少,解算得到的點云劇減,只有461個;在相機加裝濾光鏡時,無論在何種亮度條件下,散斑圖案總是清晰可辨的,圖像灰度分布跳動大,在照度為20400lx時仍然可以解算出點云,且解算得到的點云數量與在正常條件下解算的大致相同。
3.2 誤差驗證
為驗證激光散斑投射進行輪廓測量的可靠性,對一標準球進行測量,測量溫度為23℃,標準直徑為99.998 mm,用激光散斑投射的方法進行5次實驗,將每次解算得到的點云導入到Geomagic中進行球體擬合,并記錄擬合結果。
圖 11(a)為標準球,圖 11(b)為采集到的散斑圖像,圖11(c)為球體擬合結果,表2為5次測量結果的統計。
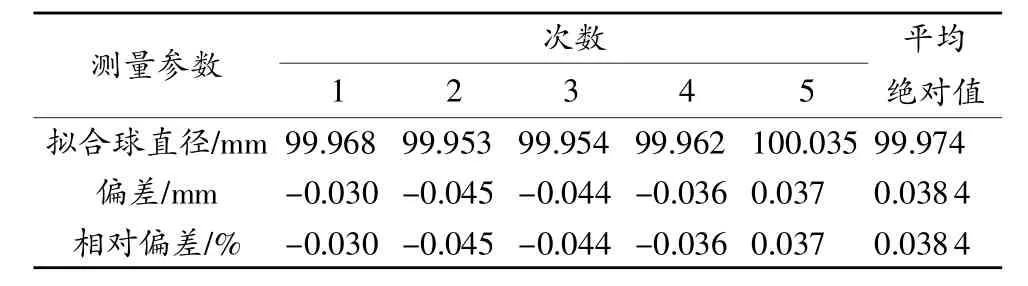
表2 標準球測量結果
由測量結果可知,5次擬合球體直徑的平均值為99.974 mm,相對偏差為0.0384%,測量的誤差可以滿足一般的工業要求。值得注意的是,采用數字圖像相關法匹配是一種區域匹配方法,它適用于模型表面光滑平整的情況,對于表面褶皺、起伏變化較多的模型,在進行圖像匹配時應選取較小的參考子圖形或者選用更為合適的匹配方法。
4 結束語
本文以數字圖像相關法作為理論基礎,設計并實現了近紅外激光散斑投射測量系統,通過給相機加裝窄帶濾光鏡的方法實現了高亮度條件下的輪廓測量。激光器體積小,便使投射器及測量系統具有體積小、便攜的優點,此外由于采用數字圖像相關法進行圖像匹配時只需采集一幀圖像,所以測量速度也比較快。采用該方法有望實現在野外或現場等光照條件復雜情況下的模型輪廓測量,具有一定的實用價值。但是,數字圖像相關法是一種區域匹配方法,當
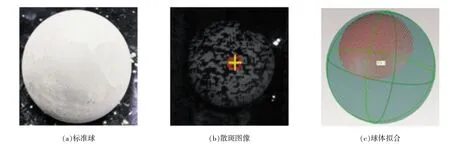
圖11 標準球測量
模型表面曲率變化較大時匹配準確度可能會降低,下一步要繼續對高效、高準確度的圖像匹配方法展開研究。
[1]韓成,楊華民,蔣振剛,等.基于結構光的計算機視覺[M].北京:國防工業大學出版社,2015:86-90.
[2]LI W G, FANG S P, DUAN S J.3D shape measurement based on structured light projection applying polynomial interpolation technique[J].Optik-International Journal for Light and Electron Optics,2013,124(1):20-27.
[3]HE Y H,CAO Y P.A composite-structured-light 3D measurement method based on fringe parameter calibration[J].Optics and Lasers in Engineering,2011,49(7):773-779.
[4]MALOWANY K, MAGDA K, RUTKIEWICZ J, et al.Measurements of geometry of a boiler drum by time-offlight laser scanning[J].Measurement,2015(72):88-95.
[5]UMEMOTO S, TANOUE S, MIYAMOTO N, et al.Concrete surface strain measurement using Moiré fringes[J].Construction and Building Materials,2014(67):115-120.
[6]LI Y, CAO Y P, HUANG Z F, et al.A three dimensional on-line measurement method based on five unequal steps phase shifting[J].Optics Communication,2012,285(21/22):4285-4289.
[7]HUO J C, WU Q Y, ZENG X J.A technique of phase-shifting for 3-D measurement using spectraltransform[J].Optics and Lasers in Engineering,2013,51(10):1133-1137.
[8]海青,沈忱.三維激光掃描儀在特殊地貌測量中的應用研究[J].測繪與空間地理信息,2016,39(3):181-183.
[9]劉會云,李永強,劉文龍,等.三維激光掃描儀平緩地形分區掃描方法研究[J].測繪工程,2015(4):6-10.
[10]曹之樂,嚴中紅,王洪.雙目立體視覺匹配技術綜述[J].重慶理工大學學報(自然科學),2015,29(2):70-75.
[11]李靖,王煒,張茂軍.雙目立體視覺和編碼結構光相結合的三維重建方法[J].計算機應用,2012,32(2):154-158.
[12]唐正宗,梁晉,肖振中,等.大變形測量數字圖像的種子點匹配方法[J].西安交通大學學報,2010,44(11):51-55.
[13]唐正宗,梁晉,肖振中,等.用于三維變形測量的數字圖像相關系統[J].光學精密工程,2010,18(10):2244-2253.
[14]PAN B, ASUNDI A, XIE H, et al.Digital image correlation using iterative least squares and pointwise least squares for displacement field and strain field measurements[J].Optics and Lasers in Engineering,2009,47(7/8):865-874.
(編輯:商丹丹)
Profile measurement of near infrared laser speckle projection in high brightness
LIANG Jin, LIANG Yu, ZHANG Hengwei, XU Jinlan, MENG Fanchang, YOU Wei, LIU Liejin
(School of Mechanical Engineering,Xi'an Jiaotong University,State Key Laboratory for Manufacturing Systems Engineering,Xi'an 710049,China)
In order to accomplish the profile measurement of a model in the condition of high brightness,a random vectorized speckle pattern should be generated on a computer first and then it will be made into a speckle piece as a speckle reflection template with a laser engraving technology.The laser speckle projector will be made by taking a VCSEL laser(wavelength is 850 nm) as the light source of the speckle projection.Under the condition of high brightness, the narrowband filter is installed to realize the clear acquisition of speckle image, the stereo matching of image will be completed based on the digital image correlation method and finally the model point will be calculated.Experiments show that under the condition of 20 400 lx,the method can still measure the profile of the model and the relative deviation of the test results of a standard ball is 0.038 4%.The study shows that using the near infrared laser as the light source and equipping narrowband filter to the camera can reduce the interference effectively and the precise model contour measurement can be realized under the condition of high brightness.
profile measurement; digital image correlation method; speckle; near infrared laser
A
1674-5124(2017)11-0017-05
10.11857/j.issn.1674-5124.2017.11.004
2016-12-29;
2017-02-12
國家自然科學基金資助項目(51675404,51421004)
梁 晉(1968-),男,河南鄭州市人,教授,博士生導師,研究方向為機器視覺。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
