可見光通信中LED的非線性后失真補償技術研究*
2017-12-01 06:43:09徐旭東
網(wǎng)絡安全與數(shù)據(jù)管理 2017年22期
徐旭東
(南京郵電大學 通信與信息工程學院,江蘇 南京 210003)
可見光通信中LED的非線性后失真補償技術研究*
徐旭東
(南京郵電大學 通信與信息工程學院,江蘇 南京210003)
在可見光通信系統(tǒng)中,發(fā)光二極管(LightEmittingDiode,LED)的非線性特性是可見光通信系統(tǒng)存在非線性失真的主要原因。針對可見光通信的LED非線性失真的補償技術的研究主要分為預失真補償和后失真補償技術。由于預失真方法需要在發(fā)送端增加一個物理反饋回路,因此這種方法的性價比并不高。與預失真方法相比,后失真方法從接收端對信號進行補償,不需要額外的反饋回路。現(xiàn)有的后失真方法,如Volterra判決反饋均衡方法、自適應后失真補償方法以及從頻域均衡的角度對系統(tǒng)進行補償?shù)姆椒ǎ荚诤艽蟪潭壬蠝p輕了LED的非線性失真問題對可見光通信系統(tǒng)造成的影響。機器學習作為智能化的核心,將其與后失真技術相結合,同樣可以在很大程度上減輕LED的非線性失真帶來的影響。
后失真;Volterra判決反饋均衡;自適應后失真;頻域均衡;機器學習
0 引言
隨著LED越來越廉價,并且應用越來越廣泛,針對可見光通信技術的研究也越來越多。可見光通信相比于傳統(tǒng)的無線通信技術可以解決其帶寬受限的問題,而且實現(xiàn)成本低,通信安全性和空間復用性都很高。與射頻系統(tǒng)類似,可見光通信系統(tǒng)同樣存在非線性失真問題。造成可見光通信系統(tǒng)非線性失真的原因可能有:LED電路、對發(fā)送信號進行剪切處理、數(shù)模轉換、模數(shù)轉換、LED本身特性以及光敏二極管的特性。由于可見光通信系統(tǒng)使用了密度調制和直接檢測技術,因此光電轉換和電光轉換同樣會帶來非線性影響。但在這些可能的原因中,LED的非線性特性是造成可見光通信系統(tǒng)非線性失真的主要原因[1],即經(jīng)過LED發(fā)送之前的信號和接收端接收到的信號是非線性關系,在這種情況下會使信號的解碼產生很大的困難和誤碼率。LED的非線性失真主要是因為發(fā)光子與輸入電流的幅值不成比例,并且由于載流子密度響應由頻率決定,從而又給LED帶來了記憶性問題。
針對LED的非線性特性,可以根據(jù)其是否具有記憶性對其進行建模。無記憶的典型模型有無記憶多項式模型;有記憶的模型有Volterra模型[2]、記憶的多項式模型、Wiener模型[3]以及Hammerstein模型。通過Volterra序列可以很好地描述LED的非線性特性,但其結構相對復雜,隨著模型層數(shù)的增加,參數(shù)的數(shù)量將會大大增加。記憶多項式模型是Volterra模型的一個特例,與無記憶多項式模型相比,其輸入不僅取決于當前,還取決于之前的輸入。Wiener模型也屬于Volterra模型,其包含一個線性時不變模塊和一個無記憶非線性模塊。與Wiener模型相反,Hammerstein模型是無記憶非線性模塊后面跟著一個線性時不變模塊。Wiener模型和Hammerstein模型在一定程度上減小了模型的復雜度。
本文針對LED的非線性失真問題,總結了3種現(xiàn)有的后失真補償方法,并且在QIAN H的方法的基礎上提出了將后失真補償技術與機器學習相結合,利用BP神經(jīng)網(wǎng)絡和支持向量機對LED的非線性失真進行后失真補償。
1 現(xiàn)有的后失真補償技術

圖1 后失真補償技術原理圖
1.1Volterra判決反饋均衡
文獻[4]中提出的方法是通過在接收器部分增加一個非線性Volterra序列的判決反饋均衡器來改善LED的非線性特性對可見光通信系統(tǒng)造成的影響,這種方法可以有效地補償動態(tài)或靜態(tài)的LED非線性,但結構較為復雜。文獻[2]證明了用Volterra序列模型來描述LED的非線性特性的記憶性比一般的靜態(tài)方法的可靠性要高,即和Wiener模型一樣,Volterra模型同樣可用來描述LED的非線性特性。換個方式考慮,即Volterra模型同樣可以用來描述LED的反向特性。文獻[4]中實驗表明采用二級(或二級以上)的Volterra序列的判決反饋均衡器,就可以從光功率的角度將光功率提高5 dB。
圖2為Volterra判決反饋均衡器的結構圖,包括一個線性部分和一個前饋部分,其中前饋部分對應描述系統(tǒng)的Volterra級數(shù)。判決反饋均衡器的輸出y(n)可以表式為:

(1)
其中:
(2)

(3)

(4)
其中x(n)是接收信號的樣本,a(i)是線性均衡器的參數(shù),b(i,j)和c(i,j,k)是二級和三級線性均衡器的參數(shù),這些參數(shù)對應于均衡器的前饋部分。w(i)為反饋濾波器的參數(shù),d(n)是訓練信號序列。利用最小均方算法或者遞推最小均方算法可以得到均衡器的最佳參數(shù)。
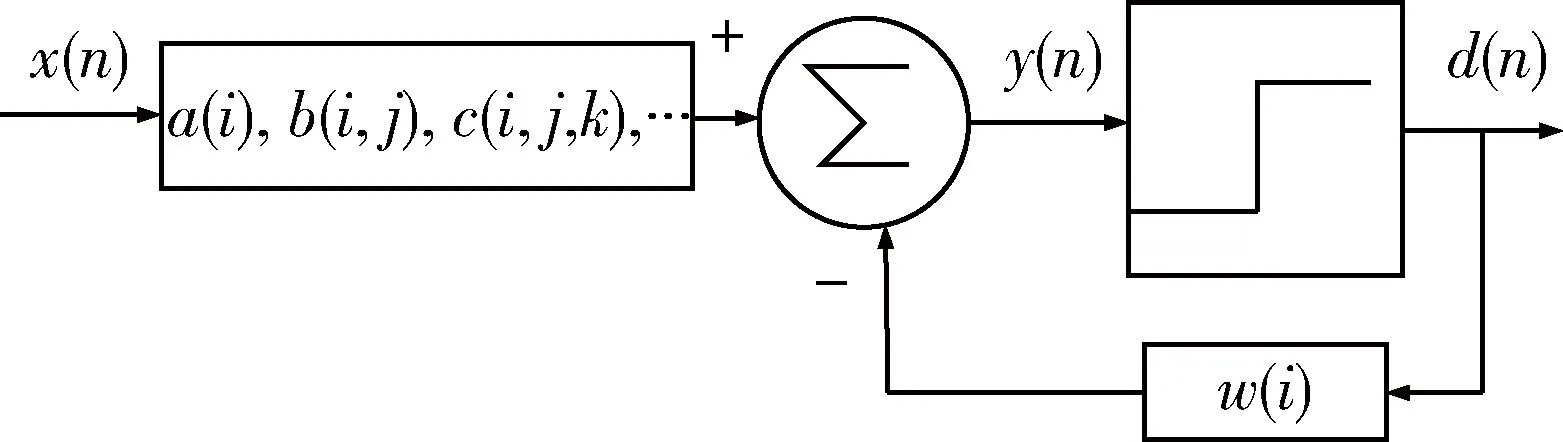
圖2 Volterra判決反饋均衡結構圖
與一般的判決反饋均衡器相比,Volterra判決反饋均衡器接收機考慮了記憶性,從而降低了系統(tǒng)誤碼率,同時,使用最小均方算法,提高了系統(tǒng)參數(shù)的收斂速度,從而進一步提高了系統(tǒng)的性能。但Volterra判決反饋均衡器的結構相對較為復雜。
1.2自適應后失真補償
在文獻[3]中,QIAN H等人提出了在接收器端采用一個反饋鏈路來自適應跟蹤和補償LED的非線性。其主要思想就是采用多項式模型作為后失真模塊,通過將y(n)作為模型的輸入,x(n)作為模型的輸出,訓練模型得到模型的參數(shù),從而確定模型。多項式模型不僅可以保證自適應后失真技術的魯棒性,而且可以將系統(tǒng)的記憶性考慮在內。文獻[3]中使用Wiener模型來模擬LED的非線性特性,同時使用DCO-OFDM來對發(fā)送信號進行調制,以減少LED的記憶性帶來的符號間干擾。
圖3為Wiener模型的結構示意圖,Wiener模型包含一個線性時不變模塊和一個無記憶非線性模塊。其中線性時不變部分可以描述為下面的數(shù)學表達式:
(5)
其中L是最大時延。
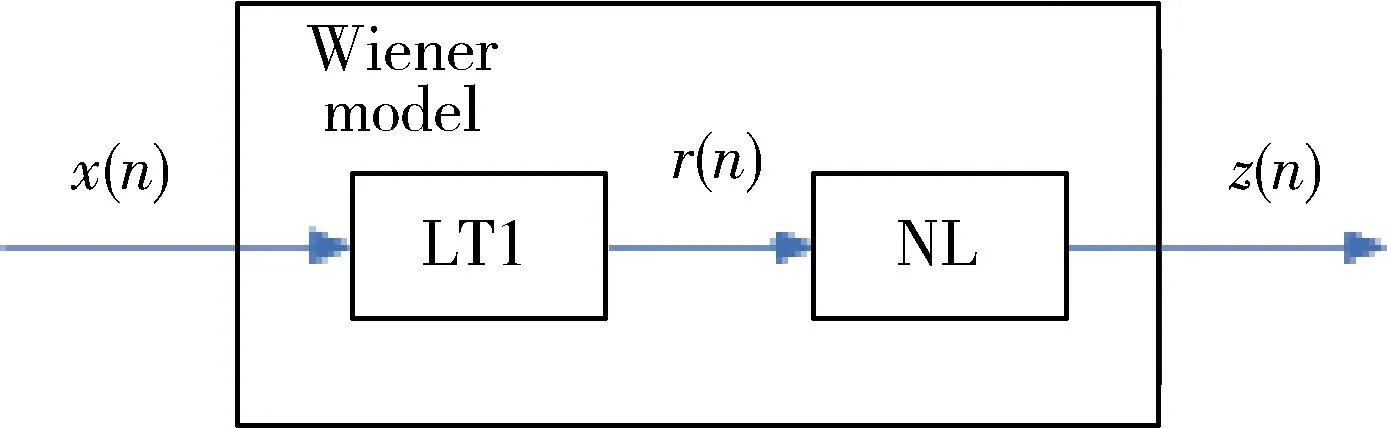
圖3 Wiener模型結構圖
無記憶非線性部分可以用Rapps模型來表示,Rapps模型通常被用來在射頻系統(tǒng)中模擬功率放大器的非線性特性。因此,LED的電流-電壓非線性可以表示為:
z(n) =

(6)
其中Imax是LED允許通過的最大電流,k是保持曲線平滑的系數(shù)。
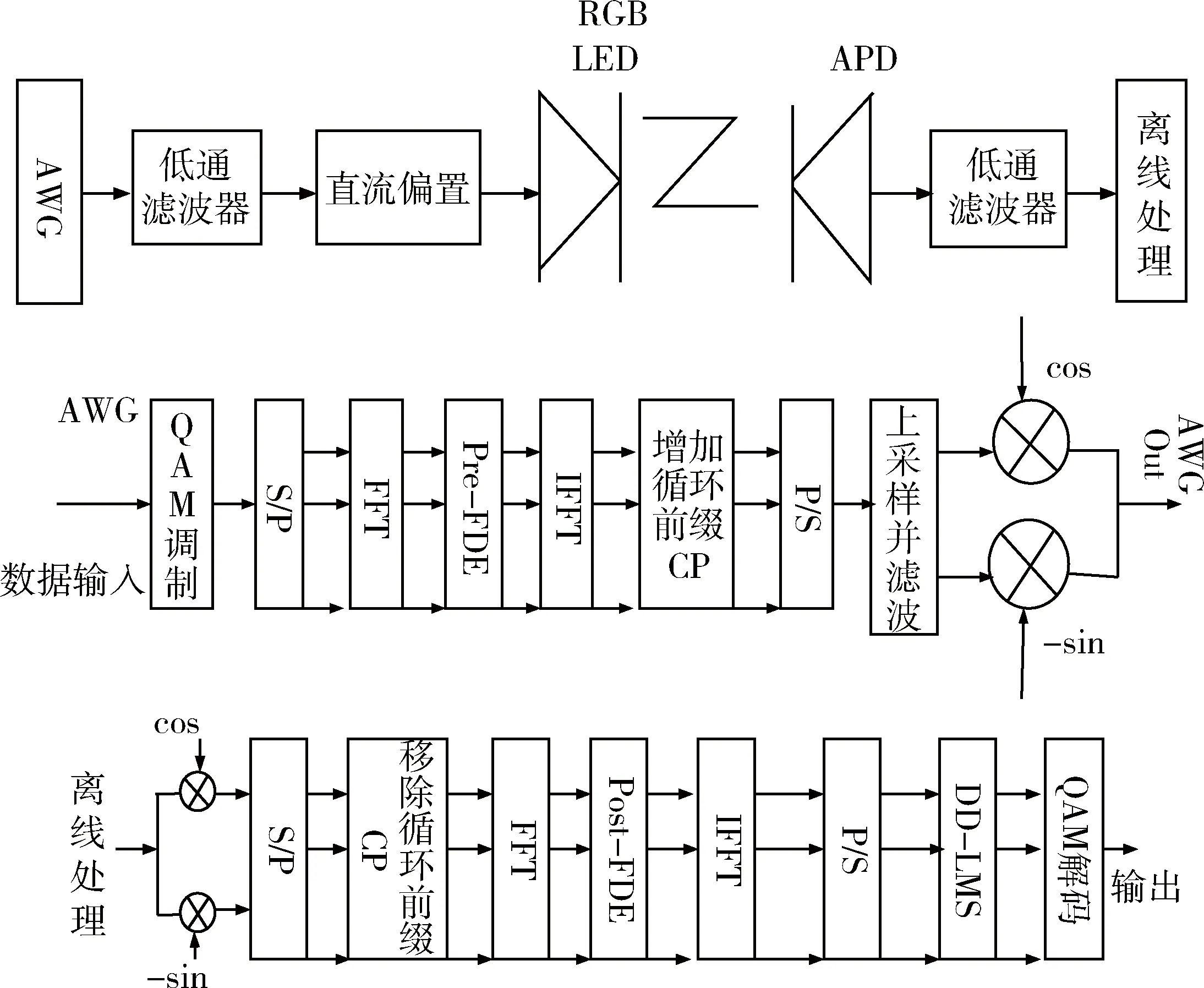
圖5 基于新型的時頻混合的自適應均衡算法的可見光通信系統(tǒng)結構圖
基于DCO-OFDM調制的可見光通信系統(tǒng)自適應后失真技術結構如圖4所示。
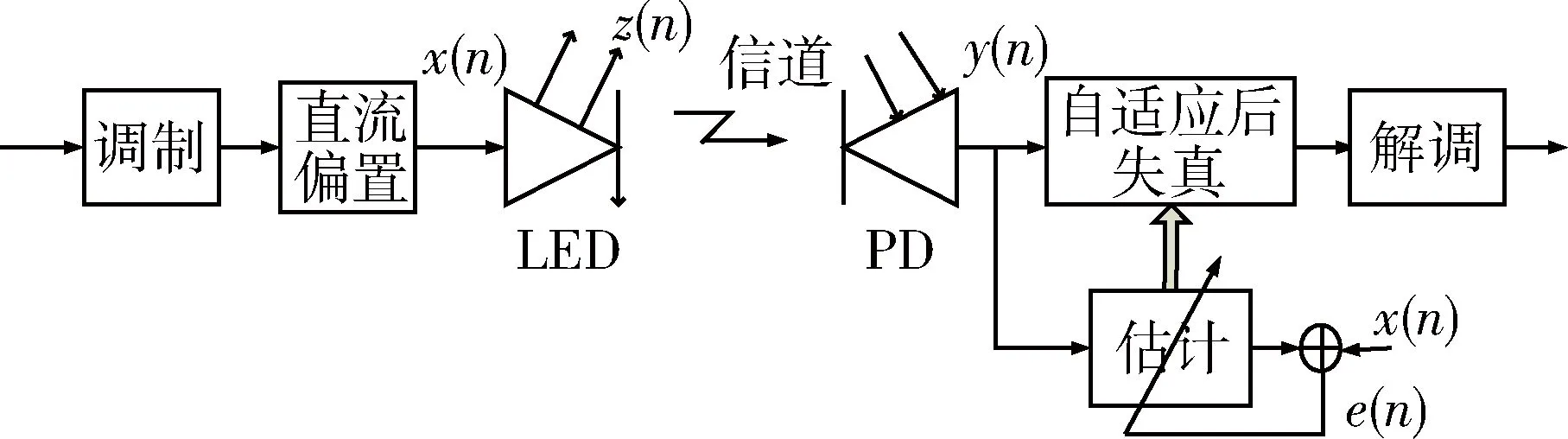
圖4 基于DCO-OFDM調制的可見光通信系統(tǒng)自適應后失真技術結構圖
多項式模型的數(shù)學表達式如下:
(7)
其中K為模型的階數(shù),D為最大的時延,αk,d是模型的參數(shù)。
用矢量方法表示α和y,則式(7)可以改寫為:
(8)
噪聲信號可以表示為:

(9)
通過最小化噪聲信號功率,可以得到其最小平方解:
α=(YHY)-1YHx
(10)
通過式(10)可以看出,在模型參數(shù)計算的過程中,需要對YHY求逆,直接對矩陣進行求逆對處理器的要求很高。因此,在實際操作仿真的過程中,可以采用一些實時的處理算法來遞推出最小二乘解:
(11)
(12)
其中P(n)是YHY的轉置,P(n)的初始值P(-1)定義為λ-1I,λ為任意小的常數(shù)。α(-1)的值一般取[1,0,…,0]T,以保證后失真器的增益為1。通過這種方法解出的α(n)即為所求的polynomial模型的參數(shù)。
文獻[3]的仿真實驗表明,采用polynomial模型作為后失真器可以很大程度上改善系統(tǒng)的BER和EVM性能,隨著記憶多項式模型的級數(shù)的增加,BER和EVM的性能隨之增加,但隨著級數(shù)增加到一定的程度的時候效果不再隨之增加。采用polynomial模型作為后失真器的優(yōu)點在于模型結構簡單,參數(shù)較少,而且效果很明顯。
1.3頻域均衡后失真補償
文獻[5]從頻域的角度采用頻域均衡的方法補償了由于LED的非平坦頻域響應造成的記憶性問題。其中,作者提出了一種新的時頻混合的自適應均衡算法,這種算法基于頻域均衡和判決引導最小均方算法。這種新型均衡器的結構圖如圖5所示。
文章在進行算法驗證的過程中使用的是RBG LED作為發(fā)送器,在接收端使用的是雪崩二極管作為接收器。輸入信號經(jīng)512QAM調制后進行時域-頻域變換,并進行預均衡,然后在信號的前面加上循環(huán)前綴,這是為了防止信號出現(xiàn)多徑干擾。低通濾波器被用來移除帶外信號,隨后將信號經(jīng)電子放大器放大,并加上偏置,使得信號全部為實的正值,隨后通過LED轉換為光信號發(fā)送出去。在接收端,去除循環(huán)前綴之后,就是一個將頻域均衡和DD-LMS相結合的新型的時域-頻域的均衡算法。首先,非平坦頻域響應被迫零均衡所補償,然后一旦誤碼率下降到10-1到10-2這樣的數(shù)量級,就進行DD-LMS。DD-LMS的結構圖如圖6所示。
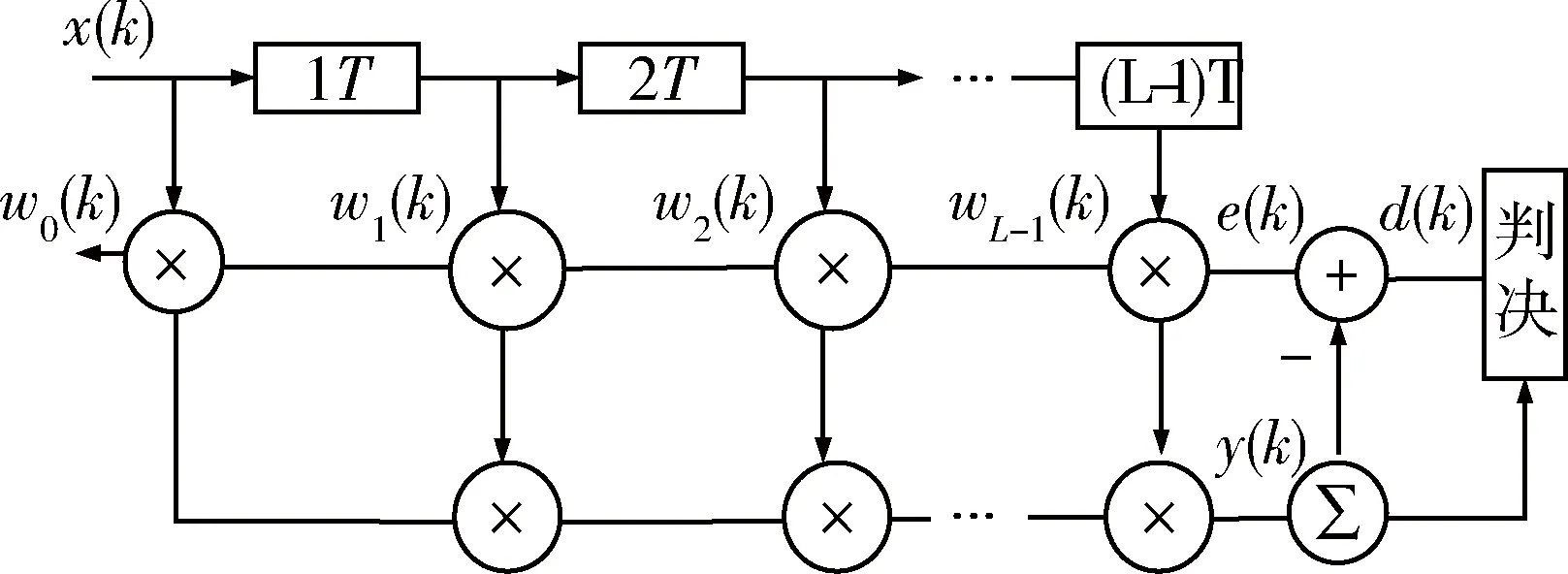
圖6 DD-LMS均衡器的框架結構圖
L階DD-LMS均衡器的輸出y(k)可以表示如下:
y(k)=wH(k)X(k)
(13)
w(k)=[w0(k),w1(k),…,wL(k)]T
(14)
X(k)=[x(k),x(k-1),x(k-2),…,x(k-L+1)]T
(15)
其中X(k)和w(k)表示輸入信號和權重系數(shù),誤差信號和自適應更新的權重如下:
e(k)=d(k)-y(k)
(16)
w(k+1)=w(k)+μe*(k)X(k)
(17)
其中d(k)為期望的輸出,μ為步長,e*(k)表示e(k)的復共軛矩陣,
使用這種新型的時域-頻域混合的均衡算法,可以使數(shù)據(jù)的速率達到4.22 Gb/s。該算法雖然在發(fā)送端也對信號做了一定的預處理,但主要實現(xiàn)是在接收端,而且該算法是針對由于LED的非平坦響應造成的記憶性問題,但記憶性問題是LED非線性失真不可以回避的問題,因此該方法也可以認為是一種后失真補償算法。與QIAN H的方法相比,該方法從頻域的角度給出了補償記憶性的方法,但該方法結構稍顯復雜。
2 機器學習與后失真技術
機器學習是人工智能的核心,是使計算機智能化的根本途徑,其研究的核心問題是如何通過計算的手段,利用經(jīng)驗來改善系統(tǒng)自身的性能。在計算機系統(tǒng)中,“經(jīng)驗”通常以“數(shù)據(jù)”形式存在,因此,機器學習所研究的主要內容是關于在計算機上從數(shù)據(jù)中產生“模型”的算法,即學習算法。下文中,將機器學習中的BP神經(jīng)網(wǎng)絡[6]和支持向量機[7]應用到后失真模塊中,以這兩種方法對LED的非線性特性進行后失真補償。
2.1BP神經(jīng)網(wǎng)絡后失真補償方法
人工神經(jīng)網(wǎng)絡是對人腦或自然神經(jīng)網(wǎng)絡的若干抽象和模擬進行分布式并行信息處理的數(shù)學模型,它具有非線性適應性信息處理能力,因此可以利用人工神經(jīng)網(wǎng)絡來擬合LED的反向特性曲線,從而對LED的非線性特性進行一定的補償。其中BP(Error Back-propagation Algorithm)神經(jīng)網(wǎng)絡[6]是一種最常見的前向反饋神經(jīng)網(wǎng)絡,其網(wǎng)絡拓撲結構如圖7所示。
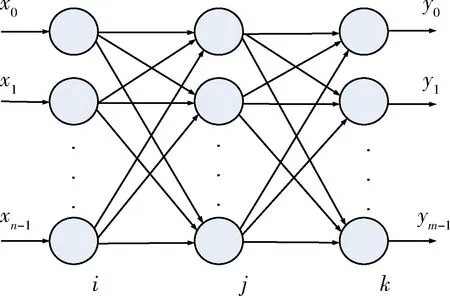
圖7 BP神經(jīng)網(wǎng)絡拓撲結構圖
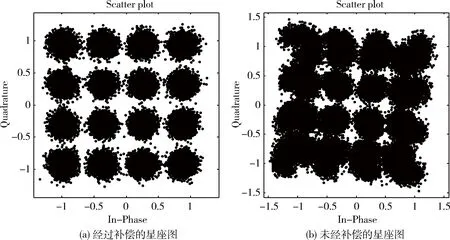
圖8 經(jīng)BP神經(jīng)網(wǎng)絡補償與未補償星座圖
人工神經(jīng)網(wǎng)絡分為三層結構:輸入層、隱藏層、輸出層。假設BP神經(jīng)網(wǎng)絡的輸入矢量為x∈Rn,其中x=(x0,x1,…,xn-1)T;隱藏層有L個神經(jīng)元,則每個神經(jīng)元的輸出z∈RL,z=(z0,z1,…,zL-1)T;輸出層有m個神經(jīng)元,則輸出y∈Rm,y=(y0,y1,…,ym-1)T。輸出層至隱藏層的權值為Wij,閾值為θj;隱藏層至輸出層之間的權值為Wjk,閾值為θk。則各層的輸出可以表示為:
(18)
其中激活函數(shù)f(x)可以根據(jù)需要選取單極性Sigmoid函數(shù)或雙極性Sigmoid函數(shù)。
BP神經(jīng)網(wǎng)絡的學習,即為BP神經(jīng)網(wǎng)絡的各層權值和閾值的學習,其學習過程是由信號的正向傳播與誤差的反向傳播兩個過程組成。在擬合可見光通信系統(tǒng)LED非線性特性曲線的反向特性的時候,可以將接收器接收到的信號作為神經(jīng)網(wǎng)絡的輸入x(n),將經(jīng)過Wiener模型之前的信號作為神經(jīng)網(wǎng)絡的輸出y(n)來訓練網(wǎng)絡,從而得到神經(jīng)網(wǎng)絡的權值和閾值。
BP神經(jīng)網(wǎng)絡的學習規(guī)則是基于最小均方誤差準則。當一個樣本(設為第p個樣本)輸入網(wǎng)絡,并產生輸出時,均方誤差應為各輸出單元誤差平方和,即:
(19)
當所有的訓練樣本輸入一次后,總誤差為:
(20)
設wsp為網(wǎng)絡中的一個連接權值,則根據(jù)梯度下降法,批處理方式下的權值修正量應為:

(21)
所以,在批處理條件下,對于輸出層的權值調整為:

(22)
對于中間隱藏層的權值調整為:
(23)
在實驗仿真的過程中,以Wiener模型模擬LED的非線性特性對系統(tǒng)造成的影響,采用16QAM調制對輸入信號進行調制,128點的快速傅里葉變換,使用DCO-OFDM對發(fā)送信號進行調制,減小LED的記憶性帶來發(fā)符號間干擾,訓練數(shù)據(jù)有128 000組。通過實驗仿真,發(fā)現(xiàn)BP神經(jīng)網(wǎng)絡可以很好地對LED的非線性進行補償。未經(jīng)BP神經(jīng)網(wǎng)絡補償與經(jīng)過神經(jīng)網(wǎng)絡補償之后的星座圖如圖8所示,信噪比與誤碼率的關系曲線如圖9所示。
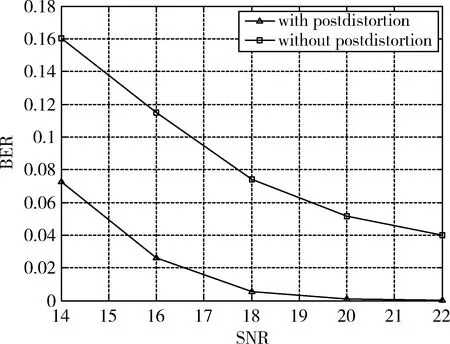
圖9 誤碼率與信噪比的關系曲線
BP神經(jīng)網(wǎng)絡與polynomial模型相比,雖然模型結構相對大一點,而且參數(shù)較polynomial多,但效果和polynomial模型很相近,并且神經(jīng)網(wǎng)絡作為機器學習領域中的一個部分,是以后大數(shù)據(jù)時代的主流方法,相比于一般的數(shù)學模型,會顯得更加智能化。
2.2支持向量機后失真補償方法
SVM算法最初是為了解決二分類問題而設計的,其主要思想是建立一個分類超平面作為決策曲面,使得正例和反例之間的隔離邊緣被最大化,從而實現(xiàn)最優(yōu)分類問題。由于其使用結構風險最小化原則,在損失函數(shù)的基礎上引入調節(jié)項,同時折中考慮經(jīng)驗風險和函數(shù)的復雜度,使得實際風險最小,從而有效地避免了傳統(tǒng)的神經(jīng)網(wǎng)絡會出現(xiàn)過擬合的問題。

圖11 經(jīng)支持向量機補償與未補償星座圖
圖10所示為支持向量機體系結構圖,其中K為核函數(shù),其主要類型有:線性核函數(shù)、多項式核函數(shù)、徑向基核函數(shù)以及兩層感知器核函數(shù)。以最常見的二分類支持向量機模型C-SVC為例,其具體形式如下:
(1)設已知訓練集:
T={(x1,y1),…,(xl,yl)}∈(X×Y)l
(24)
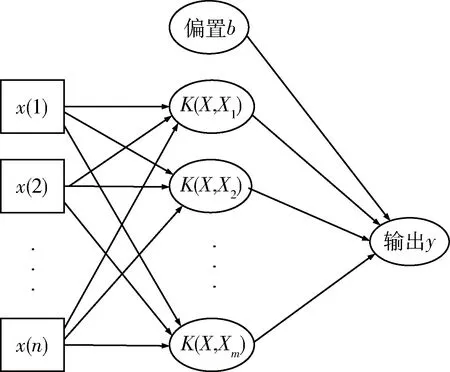
圖10 支持向量機體系結構圖
其中,xi∈X=Rn,yi∈Y={1,-1}(i=1,2,…,l);xi為特征向量。
(2)選取適當?shù)暮撕瘮?shù)K和適當?shù)膮?shù)C,構造并求解最優(yōu)化問題:

(25)

(26)
(4)構造決策函數(shù):
(27)
對支持向量機同樣進行了實驗仿真,其系統(tǒng)仿真參數(shù)設置和BP神經(jīng)網(wǎng)絡中相同,訓練數(shù)據(jù)也相同,結果顯示支持向量機作為后失真模塊,對LED的非線性特性進行補償同樣具有比較好的效果。經(jīng)過支持向量機補償之后的星座圖和未經(jīng)補償?shù)男亲鶊D如圖11所示,信噪比與誤碼率的關系曲線如圖12所示。
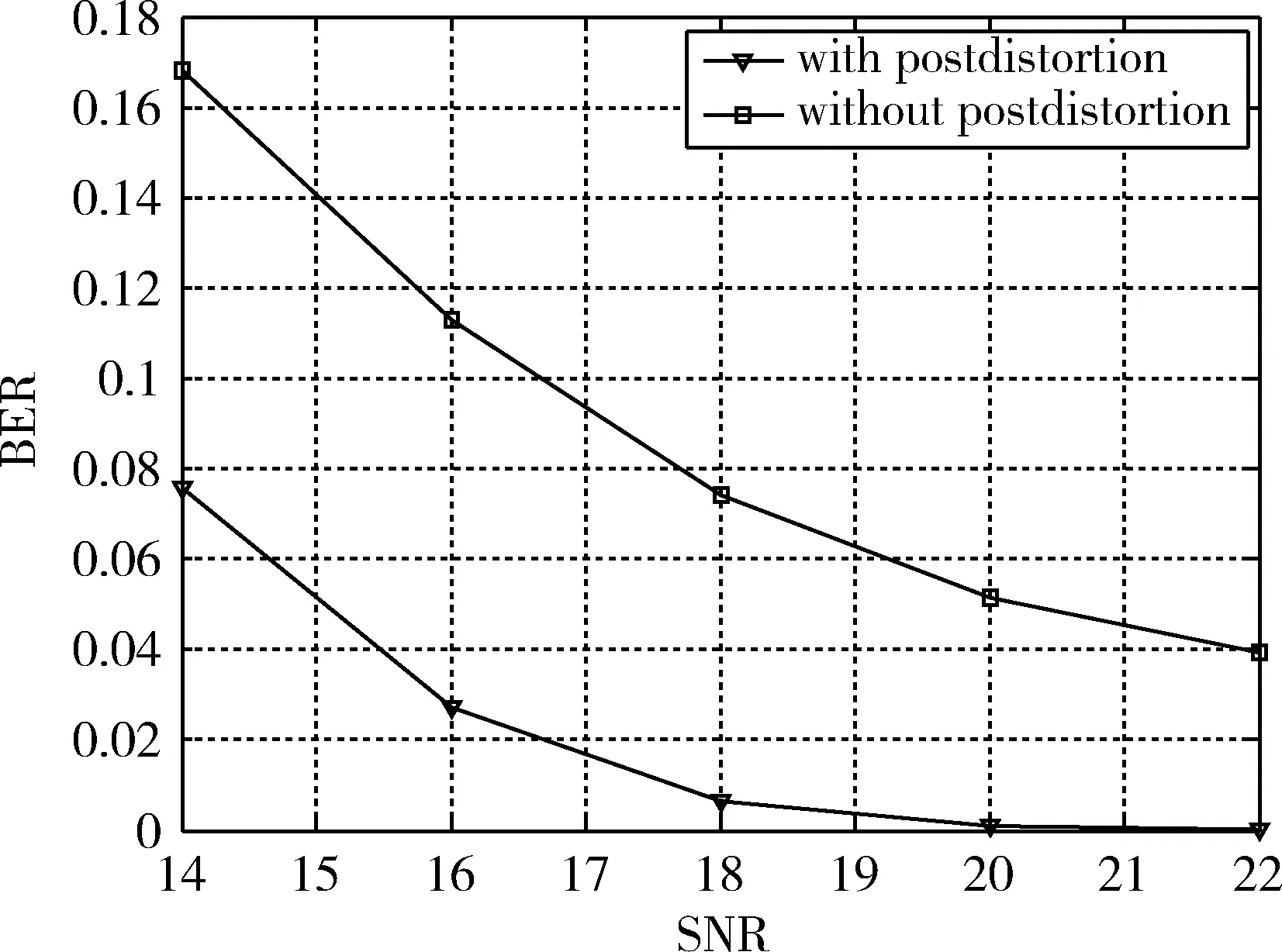
圖12 誤碼率與信噪比的關系曲線
3 結論
隨著白光LED的普及,可見光通信作為新型的光無線通信技術,擁有著巨大的發(fā)展機遇的同時,也面臨著LED的記憶性非線性問題對通信系統(tǒng)性能的挑戰(zhàn)。本文總結了3種現(xiàn)有的后失真補償方法:Volterra判決反饋均衡、自適應后失真補償以及頻域均衡,通過后失真補償技術降低LED的非線性對通信系統(tǒng)造成的影響。其中Volterra判決反饋均衡和頻域均衡方法相比于自適應后失真補償方法,其結構相對較為復雜,且算法復雜度相對較高,而且頻域均衡的方法僅僅研究了LED的記憶性問題。在以上基礎上,提出了將后失真技術與機器學習的方法相結合,作為人工智能的核心技術,機器學習方法中的BP神經(jīng)網(wǎng)絡和支持向量機同樣可以在接收端對LED的非線性特性進行補償。
[1] Ying Kai, Yu Zhenhua, BAXLEY R J, et al. Nonlinear distortion mitigation in visible light communications[J]. IEEE Wireless Communications, 2015, 22(2): 36-45.
[2] STEPNIAK G, SIUZDAK J, ZWIERKO P. Compensation of a VLC phosphorescent white LED nonlinearity by means of volterra DFE[J]. IEEE Photonics Technology Letters, 2013,25(16): 1597-1600.
[3] KAMALAKIS T, WALEWSKI J W, NTOGARI G, et al. Empirical volterra-series modeling of commercial light-emitting diodes[J]. Journal of Lightwave Technology, 2011, 29(14): 2146-2155.
[4] QIAN H, YAO S J, CAI S Z, et al. Adaptive postdistortion for nonlinear LEDs in visible light communications[J]. IEEE Photonics Journal, 2014, 6(4): 1-8.
[5] WANG Y, HUANG Y, ZHANG J, et al. Enhanced performance of visible light communication employing 512-QAM N-SC-FDE and DD-LMS[J]. Optics Express, 2014,22(13): 15328-15334.
[6] 盛仲飆. BP神經(jīng)網(wǎng)絡原理及MATLAB仿真[J]. 渭南師范學院學報,2008,23(5):65-67.
[7] SEBALD D J, BUCKLEW J A. Support vector machine techniques for nonlinear equalization[J]. IEEE Transactions on Signal Processing, 2000,48(11): 3217-3226.
2017-04-20)
徐旭東(1993-),男,碩士研究生,主要研究方向:可見光通信,機器學習。
Nonlinear post-distortion for LED in visible light communication
Xu Xudong
(College of Telecommunications and Information Engineering, Nanjing University of Posts and Telecommunications, Nanjing 210003, China)
In a visible light communication system, the light emitting diode(LED) is the major source of nonlinearity. The research on compensation technique for LED nonlinear distortion is divided into predistortion and post-distortion. Predistortion may not be a cost-efficient approach as it needs additional feedback circuits at the transmitter. Compared to predistortion, post-distortion compensates the signal at the receiver and does not require an additional feedback loop. The existing post-distortion methods, such as the Volterra decision feedback equalizer(DFE),the adaptive post-distortion and the frequency domain equalization, have greatly mitigated the nonlinear distortion of LED. Machine learning as the core of intelligence, combined with post-distortion, also can mitigate the impact of nonlinear distortion of LED.
post-distortion; Volterra DFE;adaptive post-distortion; frequency domain equalization; machine learning
TN92
A
10.19358/j.issn.1674- 7720.2017.22.021
徐旭東.可見光通信中LED的非線性后失真補償技術研究J.微型機與應用,2017,36(22):78-82,90.
國家自然科學基金(61603197);江蘇省博士后基金(1401045C);南京郵電大學科研基金(NY214034,NY215104)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34