二自由度關節型機器人的自適應模糊滑模控制
2017-12-12 08:59:44李公法孔建益蔣國璋
武漢科技大學學報 2017年6期
關鍵詞:系統
杜 峰,孫 瑛,2,李公法,2,李 喆,孔建益,2,蔣國璋,2,江 都
(1.武漢科技大學冶金裝備及其控制教育部重點實驗室,湖北 武漢,430081;2.武漢科技大學機械傳動與制造工程湖北省重點實驗室,湖北 武漢,430081;3.武漢船舶設計研究院有限公司,湖北 武漢,430064)
二自由度關節型機器人的自適應模糊滑模控制
杜 峰1,孫 瑛1,2,李公法1,2,李 喆3,孔建益1,2,蔣國璋1,2,江 都1
(1.武漢科技大學冶金裝備及其控制教育部重點實驗室,湖北 武漢,430081;2.武漢科技大學機械傳動與制造工程湖北省重點實驗室,湖北 武漢,430081;3.武漢船舶設計研究院有限公司,湖北 武漢,430064)
針對二自由度關節型機器人控制問題,通過分析傳統滑模控制的不足,提出一種自適應模糊滑模控制算法。采用自適應單輸入單輸出模糊系統來計算控制增益,同時設計了基于Lyapunov穩定性理論的自適應律,最后利用Simulink軟件對自適應模糊滑模控制進行仿真實驗。結果表明,機器人各關節控制力矩的抖振現象明顯減弱,系統性能得到提升;自適應算法的加入使模糊滑模控制能在短時間內隨著系統狀態的變化自動地進行調節,穩態收斂為常數;在關節型機器人參數不確定和存在外界干擾的情況下,自適應模糊滑模控制算法依然具有良好的魯棒性和跟蹤精度。
關節型機器人;二自由度;滑模控制;模糊控制;自適應控制;抖振;仿真
為了使機器人能夠跟蹤給定軌跡,一般是通過對其各關節的驅動力矩進行控制。根據已知的機器人結構和相關參數,可以用機器人數學模型來描述其動態特征,但在實際應用中通常很難得到準確的數學模型,而會對某些不確定的影響因素做相應處理。目前在非線性、不確定性機器人系統中,滑模控制方法得到了廣泛的應用和發展[1-3]。滑模控制的變結構特點體現在系統結構是隨著系統狀態而變化的,這種結構使系統可以沿著滑模面附近軌跡運動。因為滑模控制與系統的參數攝動及外界干擾無關,所以它的一個顯著優點是魯棒性較好。但是,滑模控制的不連續性會使系統產生抖振現象[4-5]。抖振會影響系統控制的精確性,增加系統能量消耗,甚至會激發系統未建模部分的強烈振動從而危害系統[6],因此如何削弱抖振是滑模控制研究的重要問題,而將多種控制方法相結合是近年來采用較多的研究思路[7-8]。
本文將自適應控制、模糊控制和滑模控制相結合,應用于二自由度關節型機器人控制中,以達到對滑模控制系統中增益的自適應調整目的,從而減弱系統抖振,使機器人能平穩、高精度運行。
1 傳統滑模控制方法
1.1 二自由度關節型機器人建模
二自由度關節型機器人如圖1所示。圖中,g為重力加速度;連桿1的長度為l1,質量為m1,其質心到關節1的長度為lc1,轉動慣量為I1;連桿2連同負載可以視為一個整體,其質量為me,轉動慣量為Ie,質量中心到關節2的距離為Ice,質量中心與連桿2的夾角為δe。
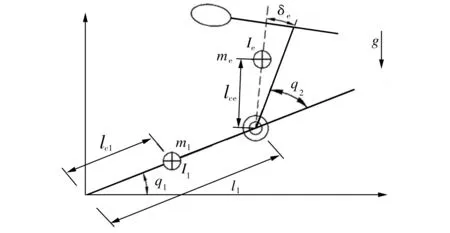
圖1 二自由度關節型機器人示意圖
多關節機器人系統動力模型表達式為:
(1)
對于二自由度關節型機器人系統,有
(2)
其中:

1.2 傳統滑模控制律的設計
定義跟蹤誤差為:
e=qd-q
(3)
式中:qd為需要跟蹤的關節角位移矢量。
設計滑模函數為:
(4)
式中:λ=diag[λ1,…,λn],λi(i=1,2,…,n)為正常數。
通過選擇控制輸入τ來實現控制目標,以使滑動面滿足充分條件:
(5)
式中:ηi為正常數。
式(5)表明滑動面的能量只要不為零就會一直衰減。為了建立τ,定義參考狀態:
(6)
(7)
設計控制律為:

(8)

將式(8)代入式(1)得:

(9)

假設|Δfi|<|Δfi|bound,取
Kii≥|Δfi|bound
(10)
為了證明系統的穩定性,選擇Lyapunov候選函數為:

(11)
由于H是對稱和正定的,且s≠0,V>0,可以證明:
Kiisgn(si))]-sTAs≤-sTAs≤0
(12)
式(11)可以作為s能量的一種指標。因此,式(12)保證了當s≠0時其能量的衰減,滿足式(5)中的充分條件。
1.3 仿真實驗
確定參數:m1=1.0,l1=1.0,lc1=0.5,I1=0.0833,me=3.0,lce=1.0,Ie=0.4,δe=0。采用Simulink軟件對二自由度關節型機器人進行傳統滑模控制仿真,結果如圖2、圖3所示。
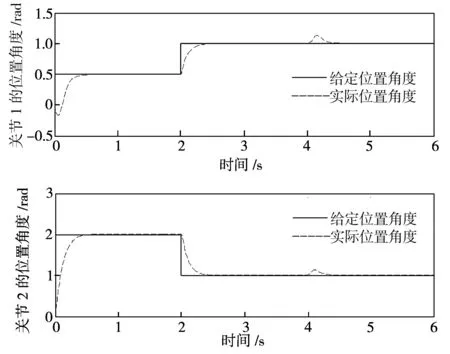
圖2 關節1 和關節2 的位置跟蹤情況
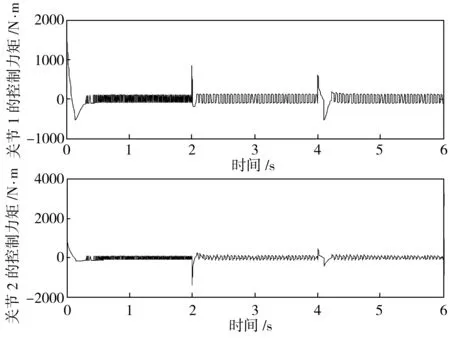
圖3 關節1 和關節2 的控制器輸出力矩
整個仿真過程分為兩個階段。第一階段,關節型機器人從初始位置到達位置1,停留一段時間,然后在t=2 s時從位置1向位置2移動。第二階段,在t=4 s時對機器人施加擾動,在t=4.1 s時取消擾動。由以上過程可知,系統狀態在機器人開始向位置1移動和在第2 s向位置2移動時發生改變。由于在第4 s時施加了擾動,系統狀態再次改變,取消擾動時系統回到了動態平衡。因此,整個過程中系統狀態改變了3次。
由圖2可見,傳統滑模控制算法能使機器人在短時間內較好地跟蹤預先給定曲線。然而由圖3可知,各關節滑模控制器輸出力矩存在明顯的抖振現象,這是本文需要解決的主要問題。
2 自適應模糊滑模控制算法設計
2.1 模糊控制器基本結構
圖4為本研究中模糊控制器的基本結構,主要包括乘積推理機、單值模糊器以及中心平均解模糊器等。系統的輸出表示為[9]:
(13)
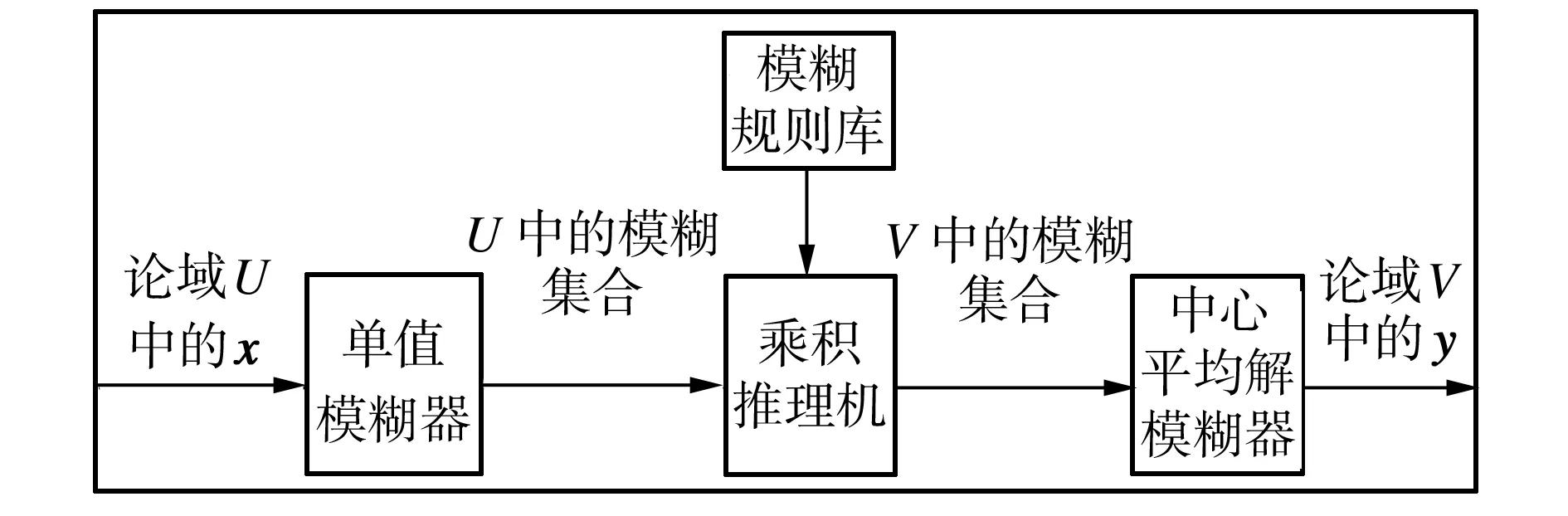
圖4 模糊控制器的結構
2.2 自適應模糊滑模控制器設計
抖振問題的產生源于定值K和不連續函數sgn(s),因此這里用模糊增益k替換控制增益K。控制輸入可寫為:
(14)
式中:k=[k1,…,ki,…,kn],其中每個元素由一個單獨的模糊系統來估計。
2.2.1 規則庫的提取
系統的不確定性和s能量的減少是由模糊增益k來補償的。這種情況下,設計模糊規則庫為:當si增大時,ki值也增大;當si減小時,只要|ki|>|Δfi|,ki值可以減小;當si為零時,ki值取零。模糊規則庫如表1所示,其中,N代表負,P代表正,B代表大,M代表中等,S代表小,ZE代表零。

表1 模糊規則庫
在上述規則中,si和ki的隸屬度函數的類型和名稱相同,但隸屬度函數對應的中心和寬度不同。此外,該控制器的自適應性體現在:si隸屬度函數的參數是預先定義的,而ki隸屬度函數的參數是在線更新的[10]。
2.2.2 控制律的設計
將式(14)代入式(1),得:

(15)

(16)
其中ωi可以盡量小。定義
(17)
則
(18)
選擇自適應律為:
(19)
選擇Lyapunov候選函數為:
(20)

(21)
將式(19)代入式(21),得
(22)
存在很小的正實數γi,使得式(16)滿足:
(23)
且式(22)等號右邊第二項滿足:
(24)
因此
(25)
式中:γ=diag[γ1,…,γi,…γn]。為簡化起見,選擇ai>γi,以使(A-γ)為一個正定矩陣,則
(26)
2.3 仿真實驗
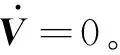
自適應模糊滑模控制系統結構如圖5所示,二自由度關節型機器人的自適應模糊滑模控制仿真結果如圖6~圖8所示。仿真條件與前述傳統滑模控制仿真相同。
從圖6可以看出,自適應模糊滑模控制算法和傳統滑模控制算法一樣具有良好的跟蹤性能。從圖7可以看出,通過自適應模糊系統對傳統滑模控制中切換增益的逼近,消除了輸出力矩的抖振現象,提升了系統性能。由圖8可見,自適應算法的加入使模糊滑模控制能在短時間內隨著系統狀態的變化自動地進行調節,穩態收斂為常數。總之,針對關節型機器人參數不確定和存在外界干擾的情況,自適應模糊滑模控制算法依然具有良好的魯棒性和跟蹤精度,由于其控制結構簡單,計算效率高,無需實時確定機器人的運動參數,因此適用于關節型機器人的實時控制場合。
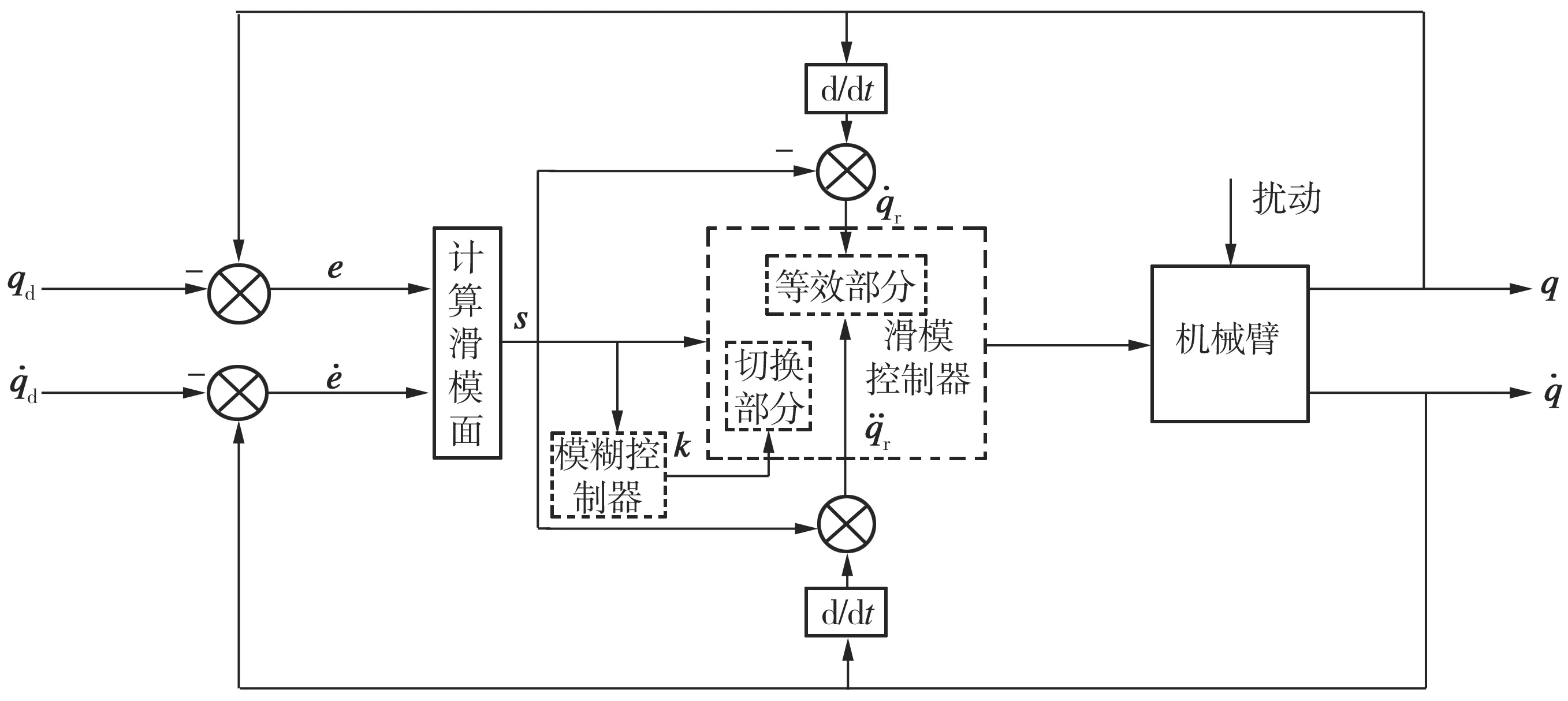
圖5 自適應模糊滑模控制系統結構
圖6 關節1 和關節2 的位置跟蹤情況
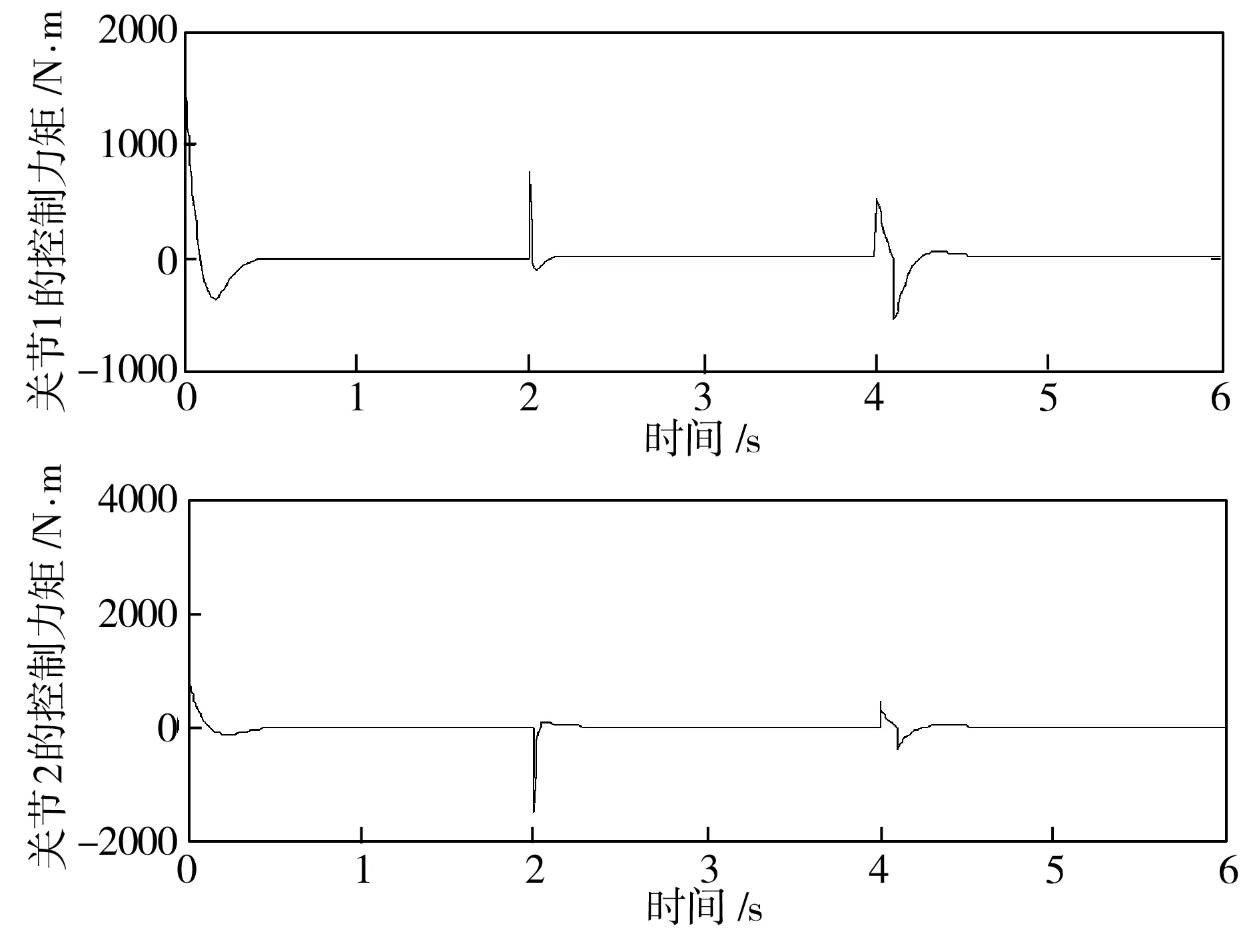
圖7 關節1 和關節2 的控制器輸出力矩
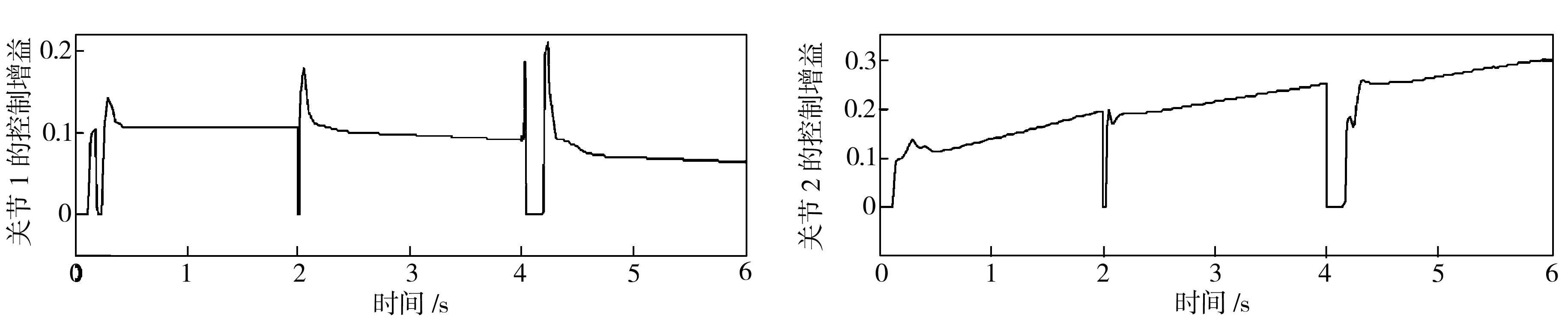
圖8 自適應模糊滑模控制的增益變化
3 結語
本文提出了一種二自由度關節型機器人的自適應模糊滑模控制算法,其中控制增益及其隸屬度函數是實時更新的,以補償系統的不確定性未知參數,無需其先驗知識,系統的穩定性也能得到保證。此外,由于控制器的模糊系統是單輸入單輸出系統,規則數相對于多輸入系統來說更少,所以控制器的設計和實現更加容易。文中對控制系統的穩定性和收斂性進行了理論證明。仿真實驗結果也表明,在給定的工況和干擾條件下,自適應模糊滑模控制在保證機器人跟蹤精度的同時,使控制力矩的抖振現象得到明顯改善,因此該控制方法是可行和有效的。
[1] 劉金琨,孫富春.滑模變結構控制理論及其算法研究與進展[J].控制理論與應用,2007,24(3):407-418.
[2] 武俊峰,李月.滑模變結構方法在兩輪自平衡機器人上的應用[J].哈爾濱理工大學學報,2013, 8(2):95-100.
[3] Rossomando F G, Soria C M. Adaptive neural sliding mode control in discrete time for a SCARA robot arm[J].IEEE Latin America Transactions, 2016, 14(6):2556-2564.
[4] Hashem Zadeh S M, Khorashadizadeh S, Fateh M M, et al. Optimal sliding mode control of a robot manipulator under uncertainty using PSO[J]. Nonlinear Dynamics, 2016, 84(4):2227-2239.
[5] Zhu S Q, Jin X L, Yao B, et al. Non-linear sliding mode control of the lower extremity exoskeleton based on human-robot cooperation[J]. International Journal of Advanced Robotic Systems, 2016, 13(5):1-10.
[6] Zhu S Q, Chen Q C, Wang X Y, et al. Dynamic modelling using screw theory and nonlinear sliding mode control of serial robot[J]. International Journal of Robotics and Automation, 2016, 31(1):63-75.
[7] Al-khazraji A, Essounbouli N, Hamzaoui A, et al. Type-2 fuzzy sliding mode control without reaching phase for nonlinear system[J]. Engineering Applications of Artificial Intelligence, 2011, 24(1):23-38.
[8] Aloui S, Pagès O, El Hajjaji A, et al. Improved fuzzy sliding mode control for a class of MIMO nonlinear uncertain and perturbed systems[J]. Applied Soft Computing, 2011,11(1):820-826.
[9] He J, Luo M Z, Zhang X L, et al. Adaptive fuzzy sliding mode control for redundant manipulators with varying payload[J]. Industrial Robot, 2016, 43(6):665-676.
[10] 胡盛斌,陸敏恂.空間三關節機器人自適應雙模糊滑模控制[J].同濟大學學報:自然科學版,2012,40(4):622-628.
[責任編輯尚晶]
Adaptivefuzzyslidingmodecontrolfor2-DOFarticulatedrobot
DuFeng1,SunYing1,2,LiGongfa1,2,LiZhe3,KongJianyi1,2,JiangGuozhang1,2,JiangDu1
(1.Key Laboratory of Metallurgical Equipment and Control Technology of Ministry of Education, Wuhan University of Science and Technology, Wuhan 430081, China; 2.Hubei Key Laboratory of Mechanical Transmission and Manufacturing Engineering, Wuhan University of Science and Technology, Wuhan 430081, China; 3.Wuhan Ship Development and Design Institute Co., Ltd., Wuhan 430064, China)
Aimed at the control of 2-DOF articulated robot, an adaptive fuzzy sliding mode control algorithm is proposed after analyzing the deficiency of classical sliding mode control method. An adaptive single-input single-output fuzzy system is applied to calculate the control gain and adaptive laws are designed based on Lyapunov stability theory. Then the adaptive fuzzy sliding mode control is simulated using Simulink software. The results show that the chattering of control torque for the joints of the robot is significantly weakened, and the system performance is improved. Fuzzy sliding mode controller can be automatically adjusted with the transformation of system state because of the adaptive algorithm, and the steady state converges to a constant. In the case of articulated robot with uncertain parameters and external disturbance, the proposed algorithm still has good robustness and high tracking precision.
articulated robot; two degree of freedom; sliding mode control; fuzzy control; adaptive control; chattering; simulation
TP273
A
1674-3644(2017)06-0446-05
2017-06-16
國家自然科學基金資助項目(51575407, 51575338, 51575412).
杜 峰(1992-),男,武漢科技大學碩士生.E-mail: 305048751@qq.com
李公法(1979-),男,武漢科技大學教授,博士生導師.E-mail: ligongfa@wust.edu.cn
10.3969/j.issn.1674-3644.2017.06.008
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32