靜水中并行兩船的水動力干擾效應數值研究
2017-12-13 02:06:48高智勇畢毅姚朝幫
中國艦船研究 2017年6期
關鍵詞:研究
高智勇,畢毅,姚朝幫
海軍工程大學艦船工程系,湖北武漢430033
靜水中并行兩船的水動力干擾效應數值研究
高智勇,畢毅,姚朝幫
海軍工程大學艦船工程系,湖北武漢430033
[目的]為研究近距并行兩船的相互干擾效應對船舶操縱性的影響,[方法]基于RANS方程對靜水中并行兩船的水動力干擾作用進行數值模擬,分析兩船在不同橫向間距、縱向間距和航速條件下阻力、橫向力、縱向力及搖艏力矩的變化規律,并在此基礎上進一步闡述各種干擾力成分在兩船水動力干擾中的變化及貢獻比例。[結果]研究結果表明,兩船所受橫向力在縱向間距為0(即中對中)時最大,表現為吸引力;隨著橫向間距的增加,相互作用效應減弱,橫向作用力最大降幅達到50%以上。縱向間距對搖艏力矩的影響較大,兩船在進入與駛離補給陣位時,所受搖艏力矩使兩船艏艉相互接近,此時容易發生碰撞。在低速狀態下可以忽略航行興波對兩船相互干擾的影響,而高速航行時則不容忽略。[結論]所得結果可為研究兩船操縱運動時相互作用力數學模型的構建奠定基礎。
兩船并行;水動力干擾;靜水;興波
0 引 言
航運業的發展使得港口、航道內的船舶密度有所增加,故海上補給以及兩船之間貨物、燃油的輸送作業也日益頻繁。受間距限制,兩船并行航行時其內側流場會發生變化,相互作用力不可忽視,嚴重時還會危及船舶的安全航行,甚至發生事故。根據我國1990年頒布的《船舶交通事故統計規則》統計結果,船舶碰撞在海難事故中占有較大比例[1]。因此,兩船靠近時的相互作用力規律及影響因素是國內外學者研究的熱點。
兩船間的相互作用力研究方法分為模型試驗和理論計算2種。基于模型試驗方法,Newton[2],Remery[3],Dand[4]分別研究了深水兩船追越、狹窄水道兩船會遇與超越,以及航行船舶與系泊船的水動力影響。近年來,Vantorre等[5-6]通過開展一系列模型試驗,全面研究了復雜工況下兩船的水動力相互作用,并提出了較為實用的兩船相互作用力估算公式。Lataire等[7-8]在船舶過駁作業方面開展了一系列模型試驗。鄭平宇等[9]研究了補給過程中并行兩船的耐波性。在理論研究方面,Tuck 等[10]、Yeung[11]、Davis等[12]及 Xiang等[13]基于細長體理論的匹配漸進展開法,研究了開闊水域、狹窄水道中兩船間的相互作用力,并在研究中忽略了流體粘性的影響。此外,Xiang等[14-15]、Yuan等[16-17]基于三維Rankine源法研究了波浪中并行兩船的水動力干擾問題;Zhou等[18]采用勢流理論數值分析了限制水域船間水動力相互作用;張謝東等[19]、陳波等[20]分別利用邊界元法和Green-Naghdi方程研究了淺水中兩船超越及會遇的相互作用力;許勇等[21-22]采用三維移動脈動源格林函數研究了波浪中并行兩船的水動力干擾問題,建立了相應的數值計算方法,其計算值與試驗值吻合度較高;周廣禮等[23]研究了兩船并行時漂角和相對位置對水動力干擾的作用;張晨曦等[24]基于Fluent和動網格技術研究了淺水中會遇船舶的相互作用力;徐華福等[25]基于高階面元法對淺水中兩船會遇和追越時的兩船水動力干擾進行了預報。然而,這些研究在采用勢流方法計算時均忽略了流體粘性的影響,在采用粘性方法計算時均忽略了航行興波的貢獻,且對航行興波在兩船相互干擾作用中的貢獻也沒有進行深入研究。
本文擬基于雷諾平均N-S(Reynolds Average Navier-Stokes,RANS)方程,采用商用流體力學軟件STAR CCM+模擬靜水中并行兩船的相互作用力,通過與試驗結果的對比,驗證數值計算方法的可靠性。并在此基礎上,進一步分析兩船靠近、并行以及駛離時的相互作用力,系統分析相互作用力隨橫向和縱向間距的變化規律,揭示兩船近距航行時的危險狀態。
1 控制方程
1.1 船體粘性流場計算方程
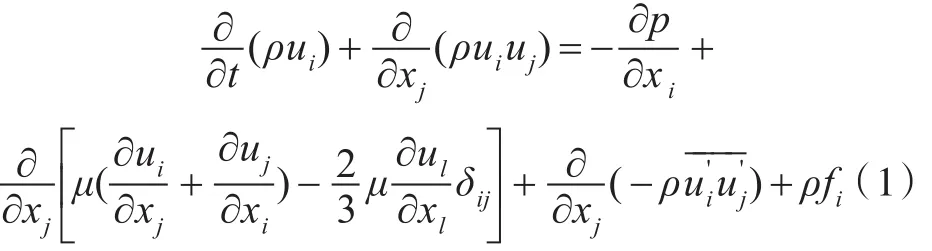
RANS方程是粘性流體運動學和動力學的控制方程,本文以此作為求解船體粘性興波流場的基本方程,其具體形式為:

湍流模式為RNGk-ε模型:
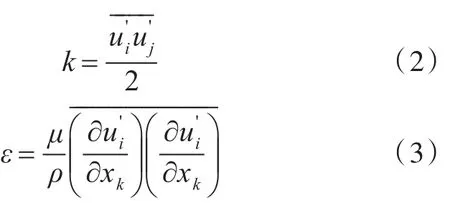
式中:k為湍動能;ε為湍能耗散率;xk為沿平均運動軌跡的空間分量。
湍流脈動動能方程(k方程)為:

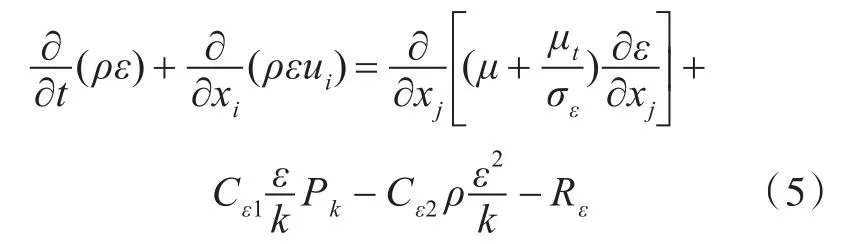
湍流能量耗散率方程(ε方程)為:
1.2 計算模型及流場設置
本文選取2個模型(船a和船b)開展理論計算,其主尺度及船型參數如表1所示,模型三維圖如圖1所示。
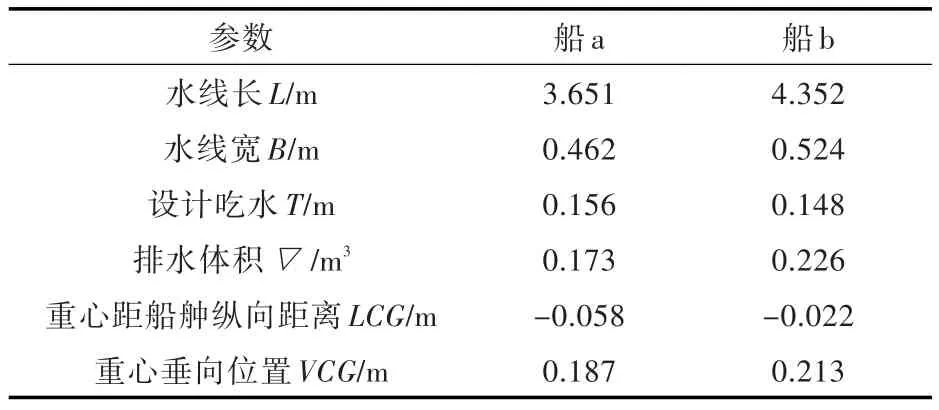
表1 模型主尺度Table 1 Main dimensions of ship model
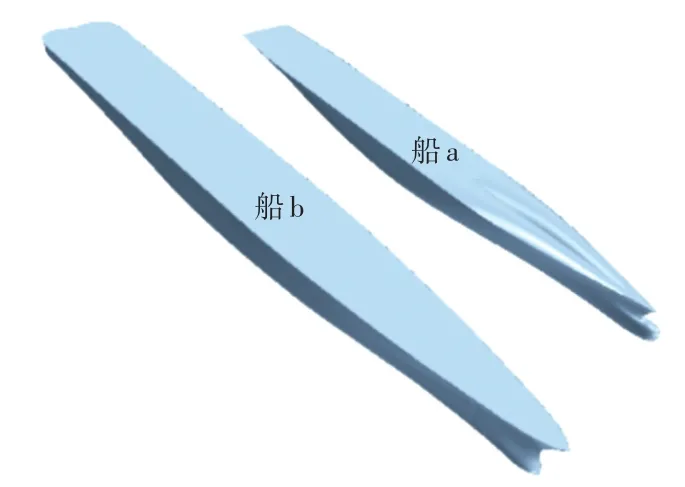
圖1 計算模型三維圖Fig.1 Profile of ship models
計算流域為:船艉向后約2倍船長,邊界條件為壓力出口,出口壓力為未擾動的靜水壓力;船艏向前約1倍船長,設為速度入口;流域向左、向右取1.5倍船長,設為速度入口;船底向下取1倍船長,設為壁面。采用剪切型網格對整個流域進行離散,離散網格如圖2所示,整個流域網格總數約1.2×106,對船體附近區域進行局部加密處理。
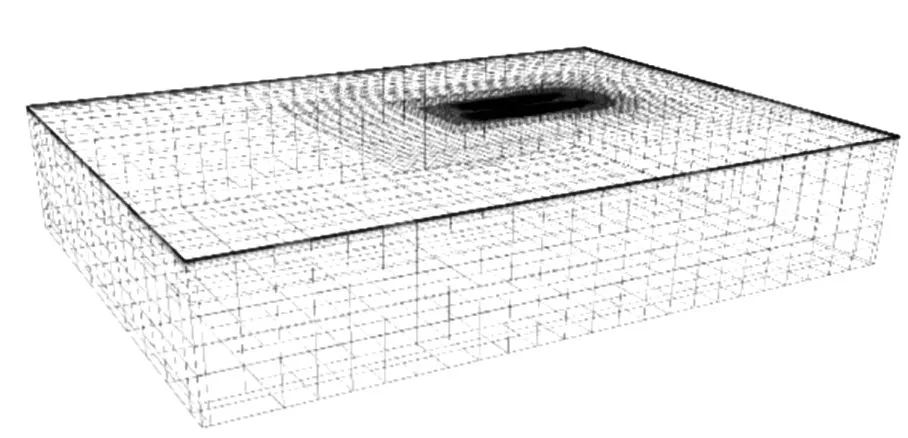
圖2 數值計算網格Fig.2 Computational grid
2 數值計算方法驗證
2.1 模型試驗簡介
為驗證所選湍流模型及網格離散方案的合理性,在某拖曳水池開展了模型試驗,試驗水池長132 m,寬10.8 m,水深2.0 m。采用CHLBS型拉力傳感器測量阻力,采用HGH型拉壓傳感器測量橫向力,采用光學測量系統Marker測量船體姿態。
試驗時模型的拖點位置取于重心位置,試驗模型上均加裝了激流絲,激流絲位于模型艏部1站處。試驗時2個模型分別安裝于自主研制的雙船拖帶系統上,該拖帶系統可以模擬船體的橫傾、縱傾及升沉3個自由度。
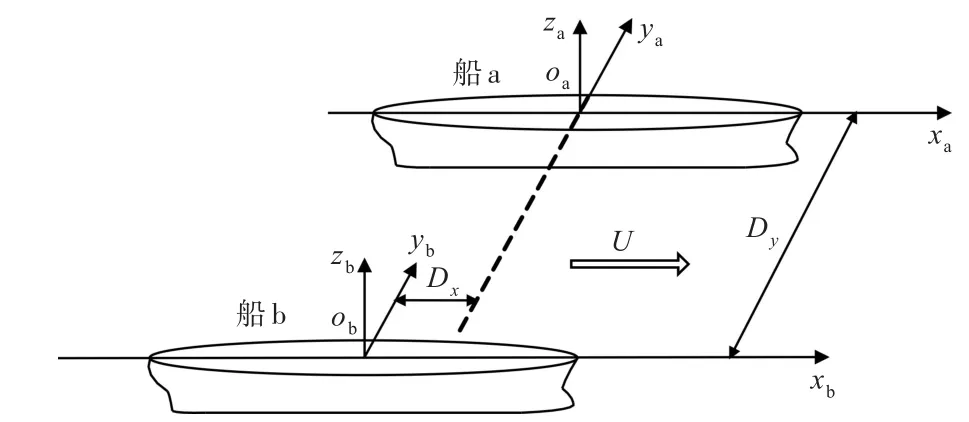
圖3 坐標系定義Fig.3 Definition of coordinate system
2.2 數值計算方法驗證
圖4 所示為Dy=0.311La時,船a及船b的橫向力Rc、阻力Rt和搖艏力矩Mt隨縱向位置變化時理論計算值與模型試驗值的對比(圖中▲表示試驗值,□表示計算結果)。整體來說,數值計算值與試驗值吻合良好,驗證了本文網格劃分及湍流模型的適用性。部分數據點存在一定誤差的原因在于:一方面,兩船干擾力試驗測量難度較大;另一方面,粘流計算也存在數值誤差。
3 兩船水動力干擾影響因素分析
采用上述網格劃分及湍流模型,開展船a與船 b在Dx=-1.096La,-0.548La,0.548La,1.096La,Dy=0.311La,0.353La,0.395La,0.437La時兩船的阻力、橫向力以及搖艏力矩的變化規律。
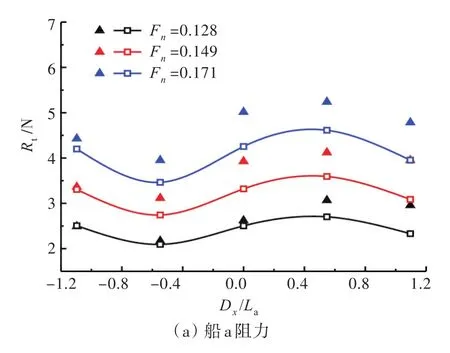

圖4 理論計算值與模型試驗值的對比Fig.4 Comparison between calculated and experimental results
3.1 縱向間距的影響
兩船的橫向位置Dy=0.311La固定不變,改變兩船的縱向位置,計算得到不同航速下兩船的受力隨縱向位置的變化曲線如圖5~圖7所示。
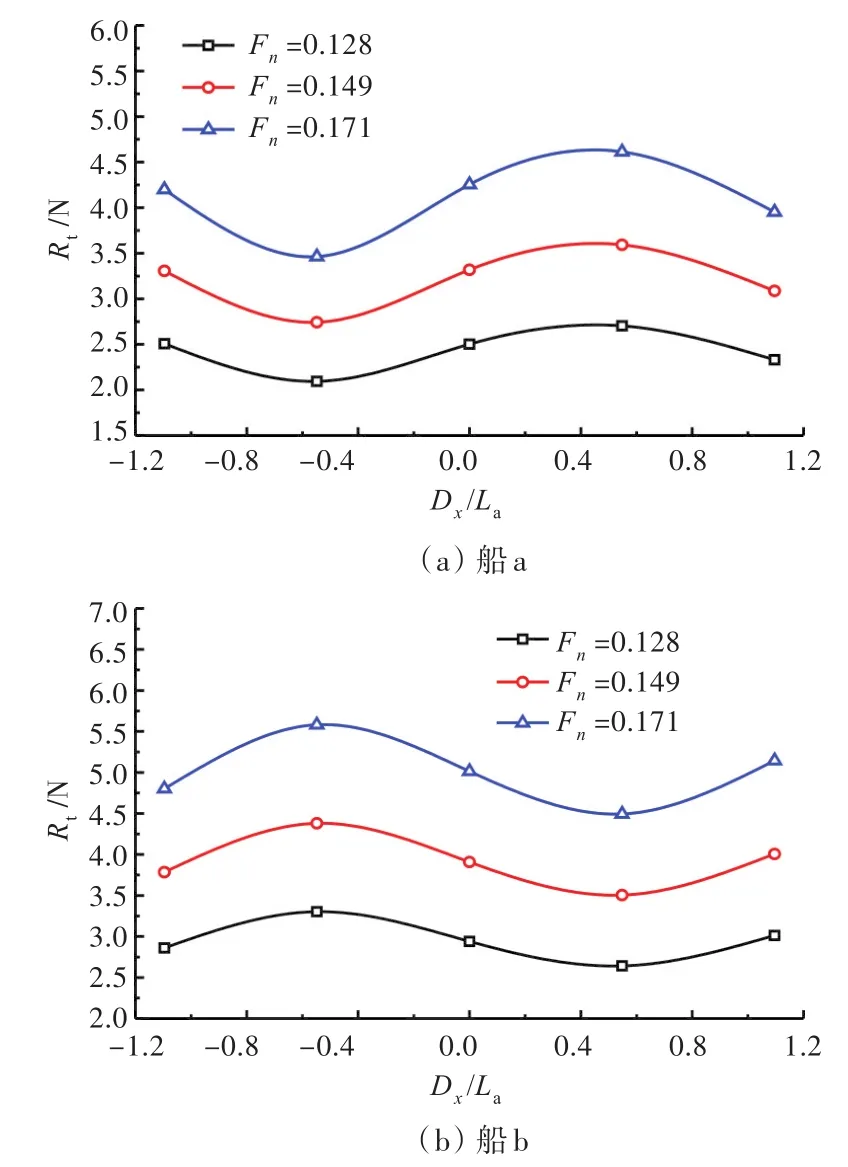
圖5 兩船阻力隨縱向位置的變化曲線Fig.5 Comparison of resistance between at different longitudinal positions
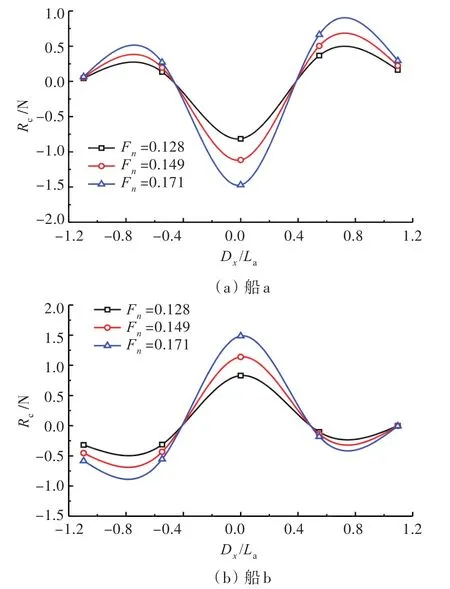
圖6 兩船橫向力隨縱向位置的變化曲線Fig.6 Comparison of lateral force at different longitudinal positions
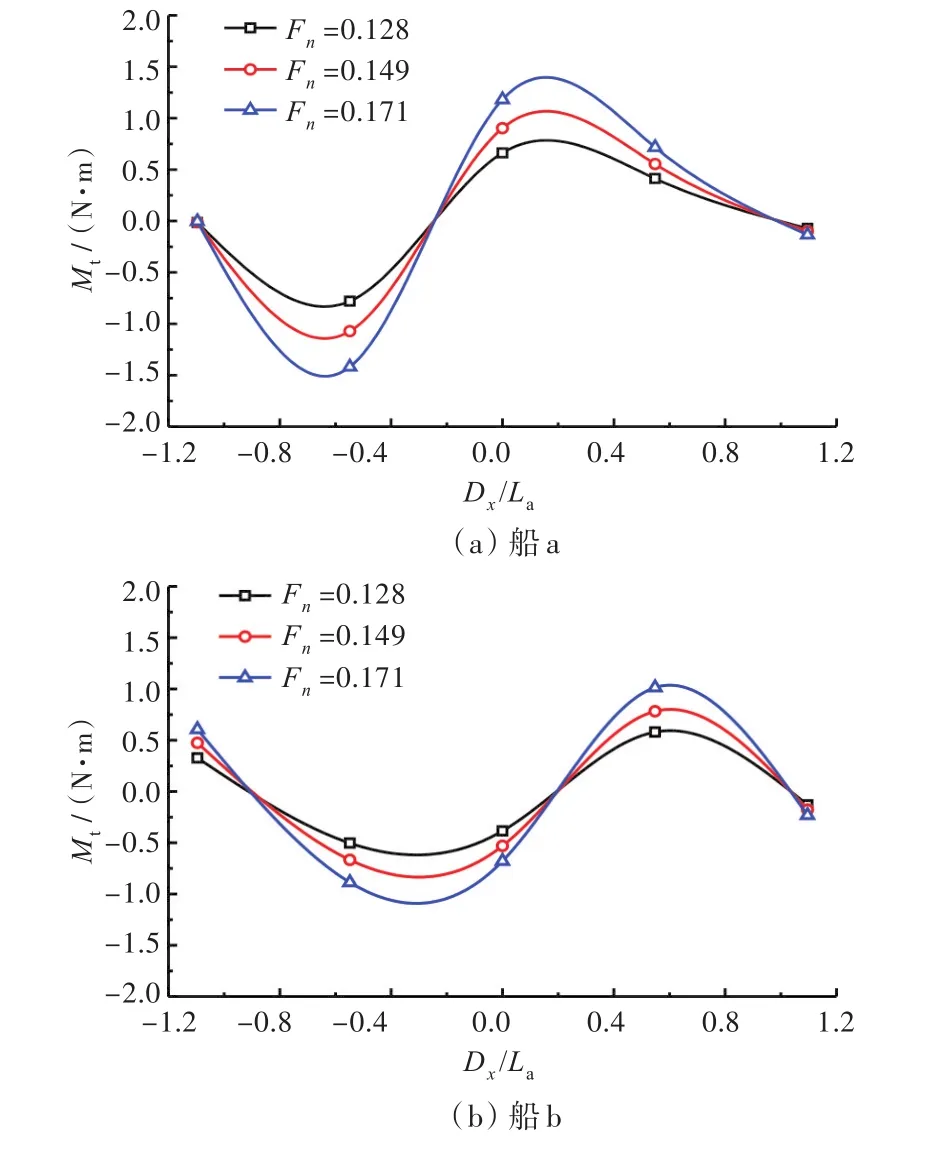
圖7 兩船搖艏力矩隨縱向位置的變化曲線Fig.7 Comparison of yaw moment at different longitudinal positions
根據圖5~圖7的計算結果,兩船在不同縱向位置時的受力如圖8所示。

圖8 兩船靠近與駛離過程的受力變化示意圖Fig.8 Demonstration of force for two ships at different longitudinal distance
由圖5~圖8可知,兩船相撞事故多發生在靠近與駛離階段,具體為:
1)兩船靠近與離開過程中,所受橫向力、搖艏力矩的大小和方向均會發生較大變化,水動力干擾顯著。
2)在兩船從靠近階段I至并行階段的過程中,兩船的相互作用力由相互排斥逐步變為相互吸引,兩船靠近;同時,搖艏力矩使兩船艏艉相互接近,故容易發生碰撞。
3)在兩船從并行階段至駛離階段I的過程中,兩船的相互作用力由相互吸引逐步轉向相互排斥,搖艏力矩使兩船艏艉相互接近從而容易發生碰撞。
同時,船a及船b所受的阻力和側向力受兩船的縱向位置影響較大;不同速度下的橫向作用力均在 Dx/La=0(即“中對中”)時達到最大,當 Fn=0.171時,船a所受到最大橫向力為1.471 N,約占該時刻船a裸體阻力的35%,而船b所受最大橫向力為1.487 N,約占該時刻船b裸體阻力的29.7%;在 Dx從-1.096La變化至1.096La的過程中,兩船相互作用力依次為相互排斥—相互吸引—相互排斥;隨著航速的增加,兩船所受的橫向作用力、阻力及搖艏力矩均增大。
3.2 橫向間距的影響
兩船的縱向位置Dx=0固定不變,改變兩船的橫向位置,研究兩船的阻力、橫向作用力以及搖艏力矩隨橫向間距的變化規律。不同速度下兩船的相互作用力隨橫向間距的變化規律如圖9~圖11所示。
隨著橫向間距的增加,兩船的橫向作用力減幅明顯;當 Fn=0.298時,橫向間距 Dy由0.311La增大至0.437La時,船a的橫向作用力由4.613 N減至1.185 N,降幅達74.3%;船b的橫向作用力由4.47 N減至2.11 N,降幅達52.8%,這說明優化選擇橫向間距是保證兩船安全航行的重要因素。
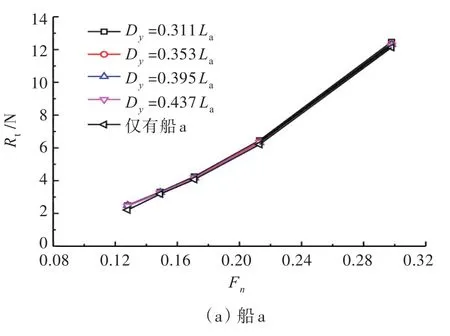
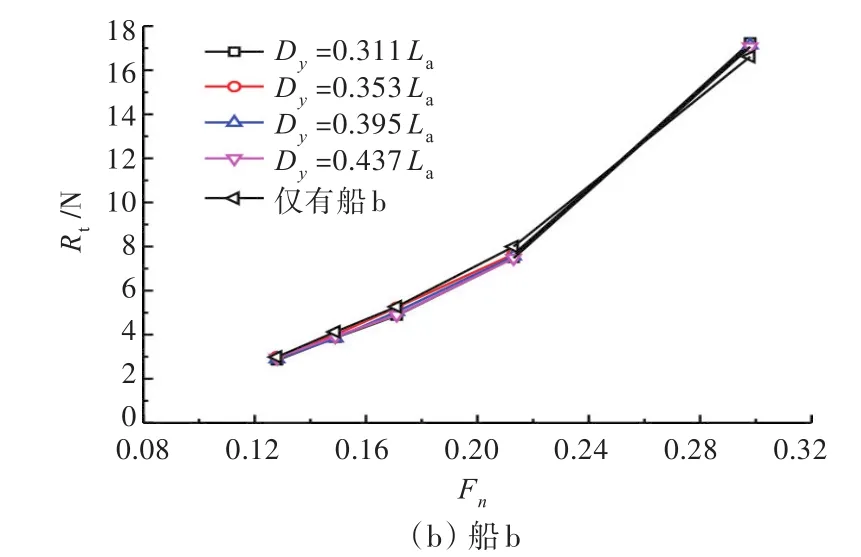
圖9 兩船阻力隨橫向位置的變化曲線Fig.9 Comparison of resistance at different lateral positions
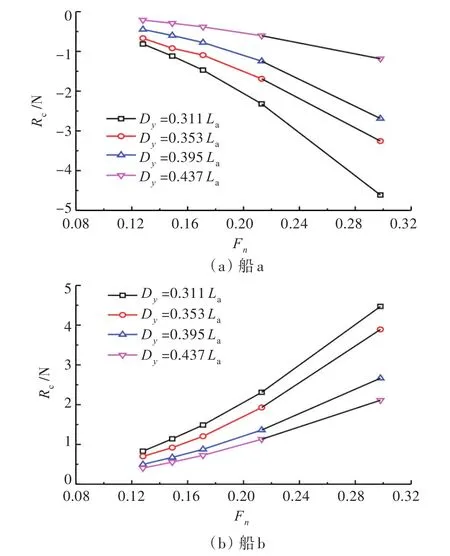
圖10 兩船橫向力隨橫向位置的變化曲線Fig.10 Comparison of lateral force at different lateral positions
圖11 兩船搖艏力矩隨橫向位置的變化曲線Fig.11 Comparison of yaw moment at different lateral positions
3.3 航行興波在兩船航行干擾中的貢獻分析
根據構成干擾力的物理成分,可將船間干擾劃分為粘性干擾和興波干擾,粘性干擾又劃分為摩擦力和粘壓力。對不同航速而言,各種干擾力成分在兩船航行干擾力中的占比不同。
兩船的縱向位置Dx=0及橫向位置Dy=0.311La均固定不變,改變兩船的航行速度,研究各種干擾力成分在兩船航行干擾力中的大小以及貢獻比例隨航速的變化,結果如圖12~圖14所示。其中,摩擦阻力和粘壓阻力由模型計算中監測數據所得,興波阻力由興波狀態下計算結果與疊模狀態下計算結果相減所得。
由圖12~圖14可知:低速狀態下,興波對兩船水動力干擾的貢獻較小,當Fn=0.128時,興波對船a阻力、橫向力和搖艏力矩的貢獻僅為4.57%,5.71%和7.94%,興波對船b阻力、橫向力和搖艏力矩的貢獻僅為11.86%,13.64%和5.79%;當Fn=0.171時,興波對兩船水動力干擾的貢獻在20%以下。因此,低速狀態下的兩船水動力干擾計算可以忽略興波的影響,為減少計算量,建議選擇疊模計算。
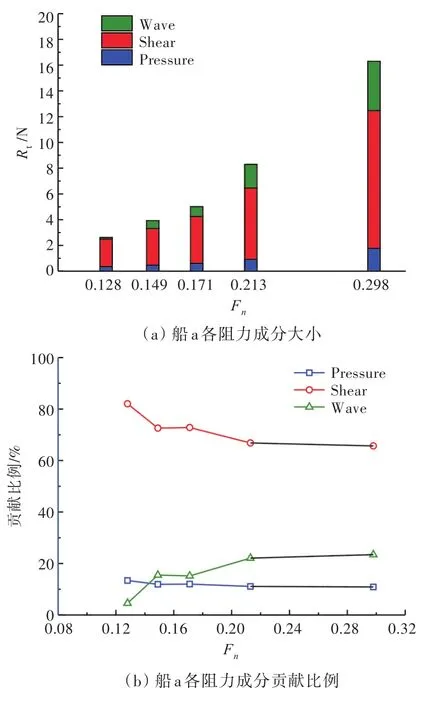
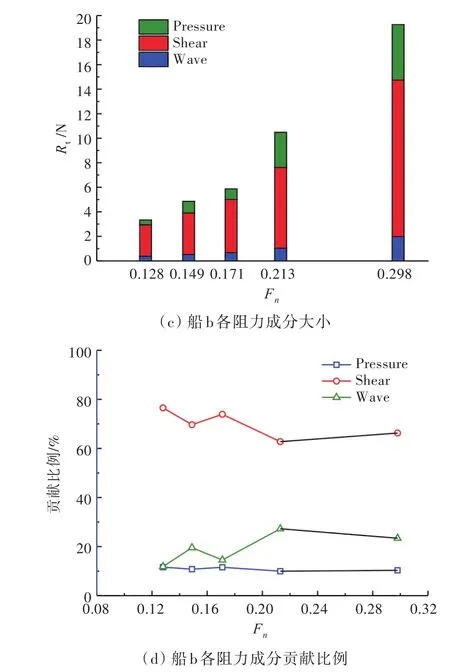
圖12 不同航速下的各阻力成分對比Fig.12 Comparison of different parts of resistance force at different velocities
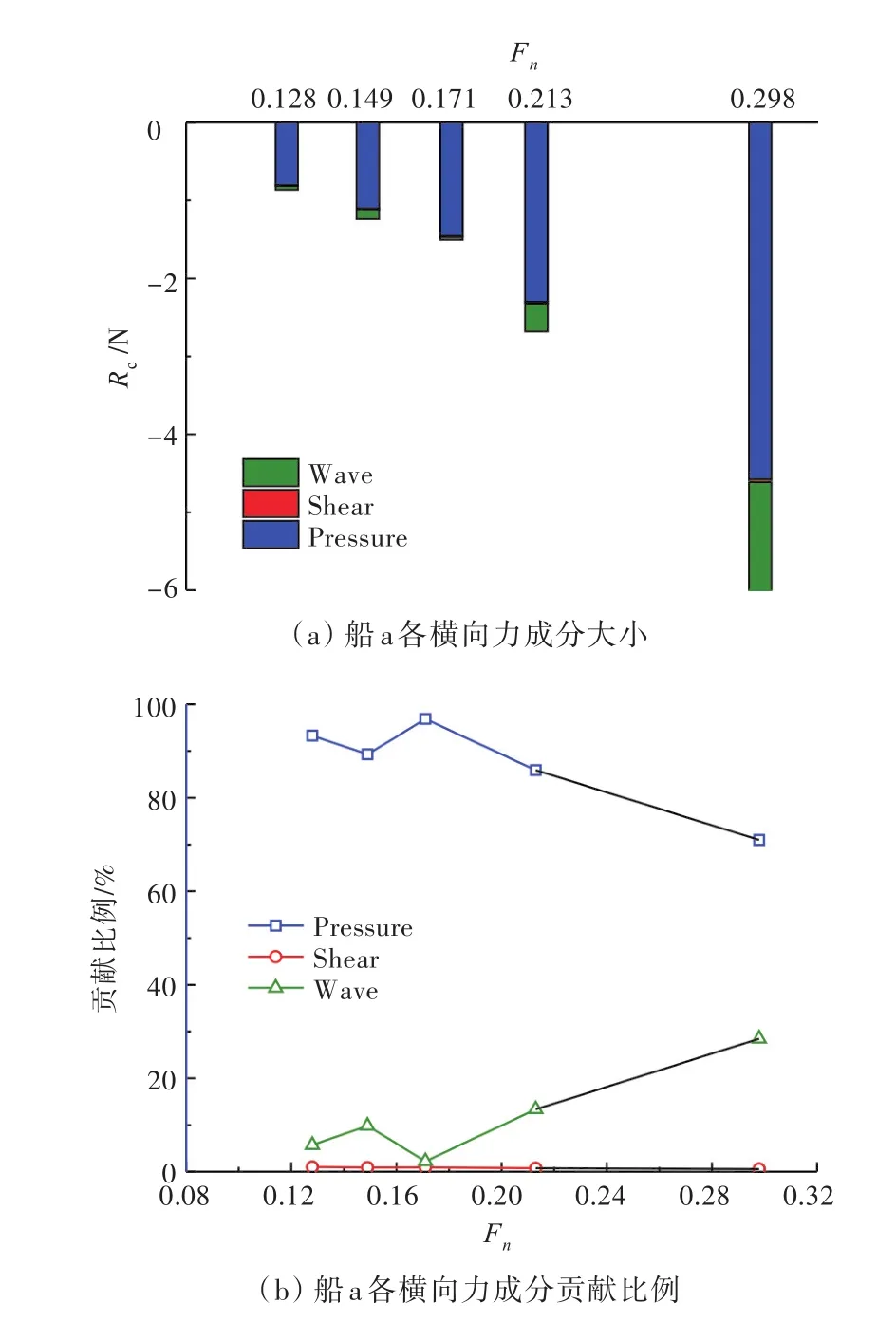
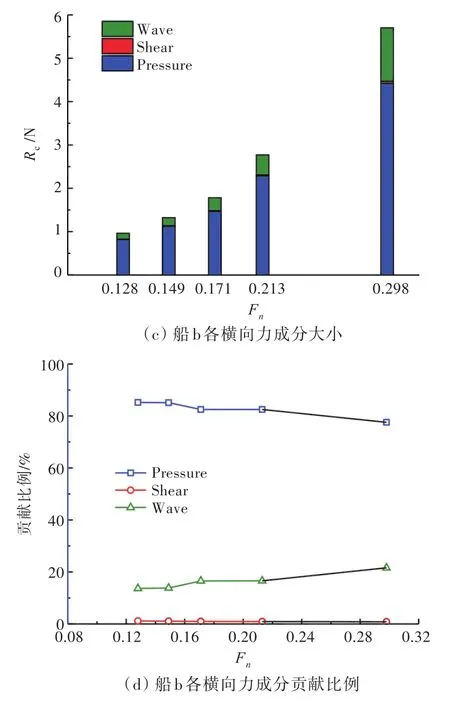
圖13 不同航速下的各橫向力成分對比Fig.13 Comparison of different parts of lateral force at different velocities
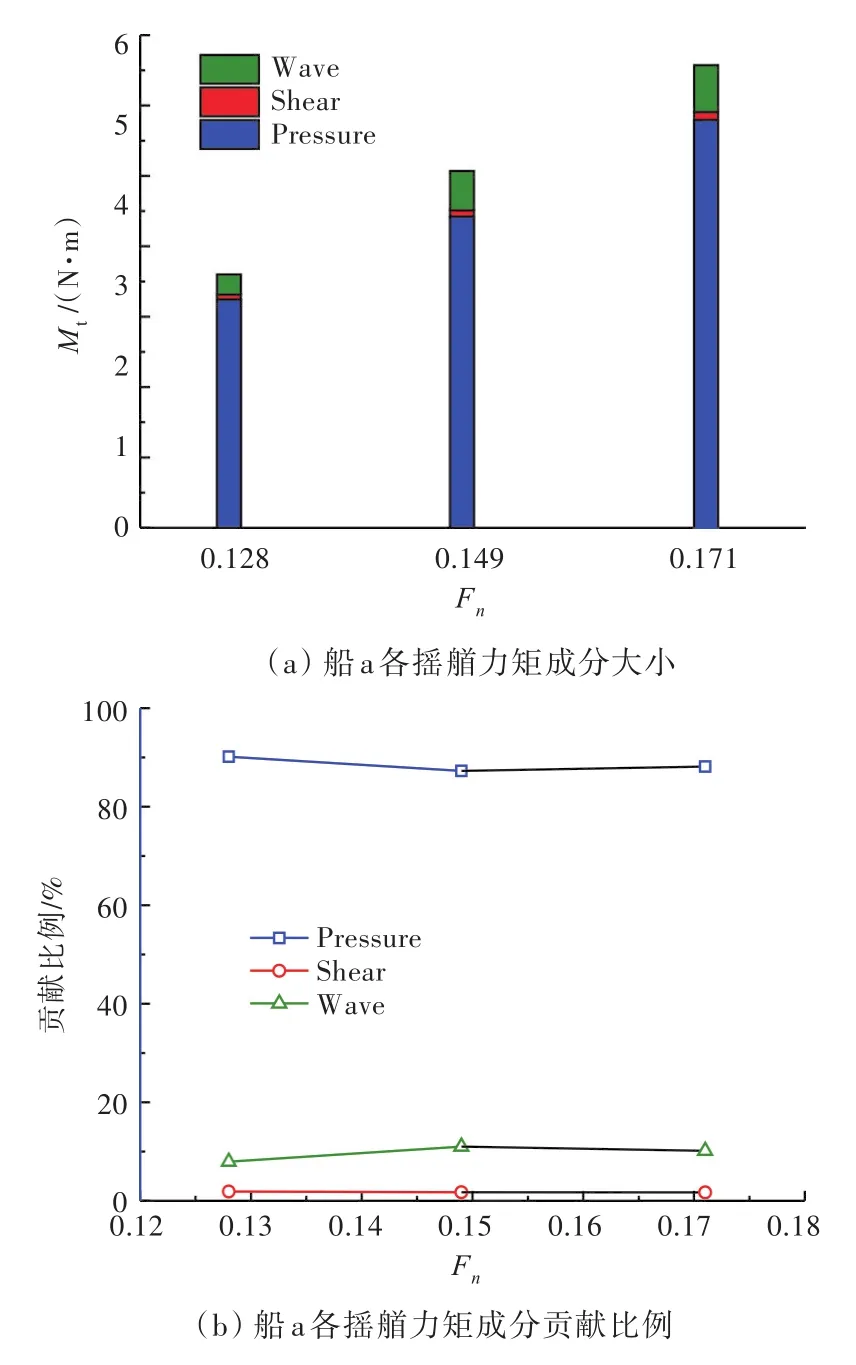
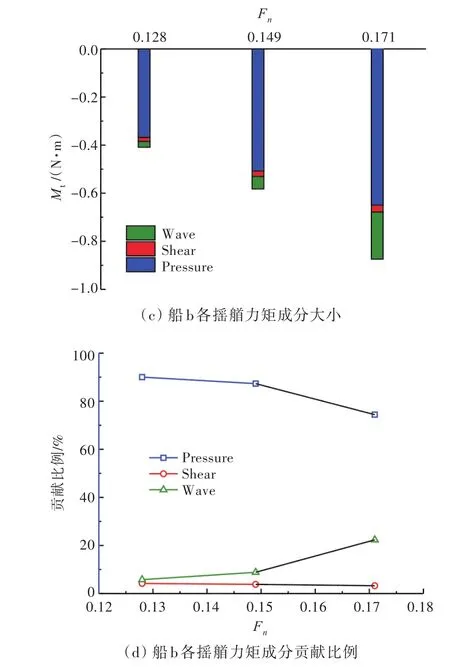
圖14 不同航速下的各搖艏力矩成分對比Fig.14 Comparison of different parts of yaw moment at different velocities
隨著航速的增加,興波對兩船水動力干擾的貢獻增長較快,較高航速時興波已經是兩船水動力干擾的重要組成部分,在Fn=0.298時,興波對船a阻力、橫向力的貢獻已經達到23.44%和28.47%,興波對船b阻力、橫向力的貢獻已經達到23.41%和21.6%。因此在速度較高時,不應選擇疊模計算,而應考慮興波的影響,從而獲得更準確的計算結果。
4 結 論
本文基于RANS方程研究了兩船間相互作用力與其縱向位置、橫向位置的變化關系以及各阻力成分在船體阻力中的變化及貢獻比例,得到如下結論:
1)兩船相互作用力受縱向間距影響較大。縱向間距變化時,橫向作用力及搖艏力矩的大小與方向均發生變化。當兩船縱向間距為0時,橫向作用力及搖艏力矩達到最大值,且此時橫向作用力表現為兩船相吸。當Fn=0.171時,船a的橫向作用力約占裸體阻力的35%,船b約占29.7%。
2)兩船的橫向作用力及搖艏力矩的大小及方向變化規律為:當兩船從縱向靠近到駛離時,兩船依次經歷相互排斥—相互吸引—相互排斥的過程;隨著航速的增加,兩船所受的橫向作用力、阻力及搖艏力矩均增大。兩船縱向距離較小(即將靠近或剛剛駛離)時,兩船間的相互作用力表現為相互吸引,在該吸力作用下兩船靠近;同時,搖艏力矩使兩船艏艉相互接近,此時容易發生碰撞。
3)隨著橫向間距的增加,兩船的相互作用力減弱,當橫向位置 Dy由0.311La增大至0.437La時,兩船的橫向作用力降幅均在50%以上,因此,選擇合適的橫向間距對兩船的安全較為重要。
4)航行興波對兩船水動力干擾的貢獻隨船速變化。在低速狀態下,航行興波對兩船水動力干擾的貢獻較小,當速度在Fn=0.171以下時,航行興波對兩船水動力干擾的貢獻低于20%,因此在低速狀態下計算兩船水動力干擾時可以忽略航行興波影響,選擇疊模計算,以節省計算時間。而隨著速度的增加,航行興波對兩船水動力干擾的貢獻增長較快,航行興波對兩船水動力干擾的貢獻比例逐漸增加,因此在速度較高時,不應選擇疊模計算,而應考慮航行興波的影響,從而獲得更準確的計算結果。
[1]關政軍.船舶交通事故的分析[J].大連海事大學學報,1997,23(1):46-51.
[2]NEWTON R N.Some notes on interaction effects be?tween ships close aboard in deep water[C]//First Sym?posium on Naval Maneuverability.Washington D.C.:[s.n.],1960:1-24.
[3]REMERY G F M.Mooring forces induced by passing ships[C]//Offshore Technology Conference.Houston,Dallas:[s.n.],1974.
[4]DAND I W.Some measurements in interaction be?tween ship models passing on parallel courses:Report 108[R].[S.l.]:National Maritime Institute,1981.
[5]VANTORRE M,VERZHBITSKAYA E,LAFORCE E.Model test based formulations of ship-ship interac?tion forces[J].Ship Technology Research,2002,49:124-141.
[6]VANTORRE M,LAFORCE E,VERZHBITSKAYA E.Model test based formulations of ship-ship interac?tion forces for simulation purposes[C]//IMSF-28th An?nual General Meeting.Genova,Italy:IMSF,2001.
[7]LATAIRE E,VANTORRE M,DELEFORTRIE G.Captive model testing for ship to ship operations[C]//Proceedings of International Conference on Marine Sim?ulation and Ship Maneuverability.Panama:IMSF,2009:1-10.
[8] LATAIRE E,VANTORRE M,DELEFORTRIE G,et al.Mathematical modelling of forces acting on ships during lightering operations[J].Ocean Engineering,2012,55:101-115.
[9]鄭平宇,李鵬,劉敬喜,等.兩船并行補給過程中耐波性的分析[J].中國艦船研究,2017,12(2):30-40,48.ZHENG P Y,LI P,LIU J X,et al.Seakeeping analy?sis of two ships advancing parallel for underway replen?ishment[J].Chinese Journal of Ship Research,2017,12(2):30-40,48(in Chinese).
[10]TUCK E O,NEWMAN J N.Hydrodynamic interac?tions between ships[C]//10th ONR Symposium on Na?val Hydrodynamics.Cambridge,USA:Office of Na?val Research,1974:35-70.
[11]YEUNG R W.On the interactions of slender ships in shallow water[J]. Journal of Fluid Mechanics,1978,85(1):143-159.
[12]DAVIS A M J,GEER J F.The application of uni?form-slender-body theory to the motion of two ships in shallow water[J].Journal of Fluid Mechanics,1982,114:419-441.
[13]XIANG X.Maneuvering of two interacting ships in waves[D].Trondheim:NTNU,2012.
[14]XIANG X,FALTINSEN O M.Maneuvering of two in?teracting ships in calm water[C]//11th International Symposium on Practical Design of Ships and Other Floating Structures.Rio de Janeiro,Brazil:[s.n.],2010.
[15]XIANG X,FALTINSEN O M.Time domain simula?tion of two interacting ships advancing parallel in waves[C]//Proceedings of 2011 the 30th International Conference on Ocean,Offshore and Arctic Engineer?ing.Rotterdam,The Netherlands:ASME,2011:1-13.
[16]YUAN Z M,INCECIK A,DAI S S,et al.Hydrody?namic interactions between two ships travelling or sta?tionary in shallow waters[J].Ocean Engineering,2015,108:620-635.
[17]YUAN Z M,HE S,KELLETT P,et al.Ship-to-ship interaction during overtaking operation in shallow wa?ter[J].Journal of Ship Research,2015,59(3):172-187.
[18] ZHOU X Q,SUTULO S,SOARES C G.Computation of ship hydrodynamic interaction forces in restricted waters using potential theory[J].Journal of Marine Science and Application,2012,11(3):265-275.
[19]張謝東,劉祖源,吳秀恒.船舶超越時相互作用力理論計算[J].武漢交通科技大學學報,1997,21(3):236-241.ZHANG X D,LIU Z Y,WU X H.Calculation of the interaction forces between ships with one overtaking the other[J].Journal of Wuhan Transportation Uni?versity,1997,21(3):236-241(in Chinese).
[20] 陳波,吳建康.淺水域中兩船交錯運行時的非定常波浪干涉[J].水動力學研究與進展(A輯),2005,20(4):486-491.CHEN B,WU J K.Interaction of shallow water waves generated by two parallel ships moving in opposite di?rections[J].Chinese Journal of Hydrodynamics(Ser.A),2005,20(4):486-491(in Chinese).
[21] 許勇,董文才.波浪中多船近距離并行航行的水動力干擾研究[J].應用數學和力學,2014,35(4):389-400.XU Y,DONG W C.Hydrodynamic interactions be?tween multiple ships advancing parallel in close prox?imity in waves[J].Applied Mathematics and Mechan?ics,2014,35(4):389-400(in Chinese).
[22]XU Y,DONG W C.Study on characteristics of 3-D translating-pulsating source Green function of deep-water Havelock form and its fast integration method[J].China Ocean Engineering,2011,25(3):365-380.
[23]ZHOU G L,DONG W C,XIAO W B.Numerical study on the hydrodynamic interaction of ship-ship models in calm water[J].Journal of Ship Mechanics,2015,19(3):237-248.
[24]張晨曦,鄒早建,楊勇.淺水中會遇船舶水動力相互作用數值研究[J].船舶力學,2012,16(1/2):27-35.ZHANG C X,ZOU Z J,YANG Y.Numerical study on hydrodynamic interaction between ships meeting in shallow water[J].Journal of Ship Mechanics,2012,16(1/2):27-35(in Chinese).
[25]XU H F,ZOU Z J,LIU X Y.Prediction of ship-ship interaction forces in shallow water using a high-order panel method[J].Journal of Ship Mechanics,2016,20(12):1535-1546.
Numerical study of hydrodynamic interaction between two ships in calm water
GAO Zhiyong,BI Yi,YAO Chaobang
Department of Naval Architecture Engineering,Naval University of Engineering,Wuhan 430033,China
[Objectives]This paper researches the influence of hydrodynamic interaction between two parallel vehicles advancing in close proximity on maneuvering.[Methods]Based on an unsteady RANS approach,the hydrodynamic interaction between two parallel ship models advancing in calm water in close proximity is analyzed via numerical 3D simulations.The effects of transverse and longitudinal distances on hydrodynamic forces acting on the hull under distinct forward velocities are investigated.Meanwhile,the changes and contributions of various disturbance components in the hydrodynamic interactions of two parallel ships are discussed.[Results]The results indicate that the lateral force reaches its peak when the longitudinal distance between the ships'centers is zero,with each ship drawing the other close.The effect of lateral interaction sees a downward trend with the lateral distance increases,with the maximum decrease of lateral force reaching 50%in the studied range.The longitudinal distance has a great effect on yaw moment,resulting in changes in value and direction.It is easier for two ships to collide when they are near or have just pulled away.The influence of wave-making on the hydrodynamic interaction between two hulls can be ignored at low speeds,while at high speeds it should be taken into account.[Conclusions]The numerical results of this paper provide the basis for constructing a mathematical model of the interaction between two ships.
two parallel ships;hydrodynamic interaction;calm water;wave-making
U661.32
A
10.3969/j.issn.1673-3185.2017.06.002
http://kns.cnki.net/kcms/detail/42.1755.TJ.20171128.1111.024.html期刊網址:www.ship-research.com
高智勇,畢毅,姚朝幫.靜水中并行兩船的水動力干擾效應數值研究[J].中國艦船研究,2017,12(6):6-14.
GAO Z Y,BI Y,YAO C B.Numerical study of hydrodynamic interaction between two ships in calm wate[rJ].Chinese Journal of Ship Research,2017,12(6):6-14.
2017-04-25 < class="emphasis_bold"> 網絡出版時間:
時間:2017-11-28 11:11
國家自然科學基金資助項目(50879090,5150256);水動力重點基金資助項目(9140A143071251311044);航空科學基金資助項目(20152316005)
高智勇,男,1992年生,碩士生。研究方向:船舶流體動力性能。
E-mail:GAOZhiyong_HG@163.com
畢毅(通信作者),男,1963年生,副教授,碩士生導師。研究方向:船舶流體動力性能。
E-mail:biyi101@163.com
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
