航磁全軸總場梯度系統補償算法研究
2017-12-16 06:48:56吳佩霖張群英劉麗華方廣有
電子與信息學報 2017年12期
吳佩霖 張群英 李 光 劉麗華 方廣有
?
航磁全軸總場梯度系統補償算法研究
吳佩霖①②③張群英*①③李 光①②③劉麗華①③方廣有①③
①(中國科學院電磁輻射與探測技術重點實驗室 北京 100190)②(中國科學院大學 北京 100049)③(中國科學院電子學研究所 北京 100190)
航空磁法勘探是一種高效、便捷的地球物理勘探方法。使用多個光泵磁力儀實現全軸梯度測量是航空磁法勘探中的一種重要手段。該文針對無人機飛行平臺設計了一種航磁全軸總場梯度測量系統,并提出使用前饋網絡的方法來實現航磁數據的補償。系統通過4個光泵磁力儀獲得全軸總場梯度數據,經過前饋網絡實現數據補償后,全軸總場梯度數據補償質量的提升比分別為15.2, 4.7和5.9,數據峰值信噪比的提升分別為17.1 dB, 6.5 dB和6.5 dB,交叉標定系數表明前饋網絡具有很好的泛化性能。實驗結果驗證了該文采用的全軸梯度系統和數據補償方法的正確性和有效性,能夠有效地應用于高精度航磁勘探領域。
地球物理勘探;全軸磁總場梯度;航磁補償;光泵磁力儀;無人直升機
1 引言


本文研究了基于無人直升機飛行平臺的航磁全軸總場梯度系統和飛機干擾磁場對全軸總場梯度數據的影響,研制了一套航磁全軸梯度系統,并提出了一種基于前饋網絡的補償算法,成功實現了飛機干擾磁場的去除。該套基于無人直升機平臺的全軸總場梯度勘探系統在濰坊昌邑鐵礦區進行了航磁勘探驗證飛行,結果表明,本文采用的航磁全軸梯度系統和提出的補償算法能有效實現數據的采集和飛機干擾磁場的補償,實現高精度的航磁勘探作業。
2 航磁系統及航磁補償
2.1 航磁全軸總場梯度系統
基于無人直升機的航磁全軸總場梯度系統采用鋁制桁架搭載4個高精度光泵磁力儀和一個三軸矢量磁力儀實現,如圖1所示。其中桁架前端的兩個光泵磁力儀a, b測量垂直方向航磁總場梯度,左右弦的兩個光泵磁力儀c, d測量橫向航磁總場梯度。前端和兩弦光泵磁力b, c和d用于測量縱向航磁總場梯度。

圖1 無人機航磁全軸總場梯度系統
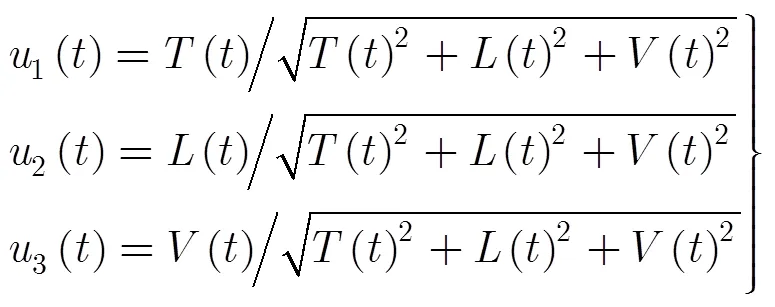
通過對光泵磁力儀測量的航磁總場數據差分可得到對應的總場梯度數據,三軸梯度的表達式為
2.2 航磁總場梯度的補償原理
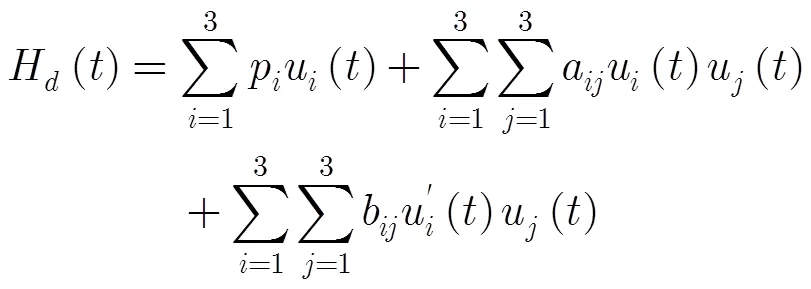
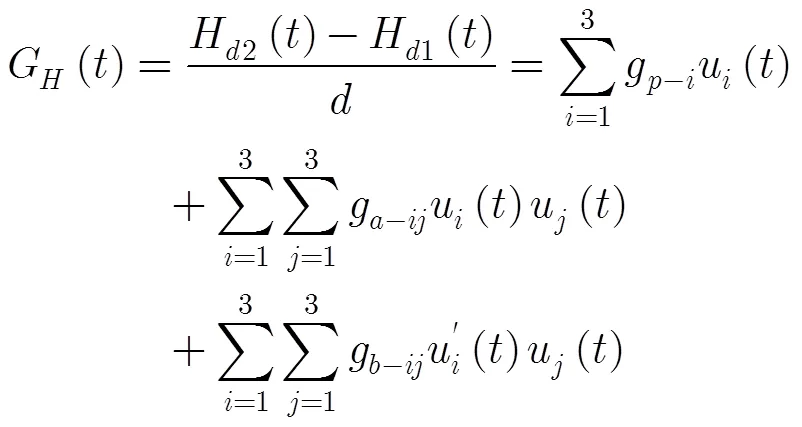
光泵磁力儀與桁架固聯,在飛機飛行過程中光泵磁力儀受到的干擾磁場可以通過航磁補償模型建模,任一探頭位置處的干擾磁場可表示為
3 前饋網絡補償算法
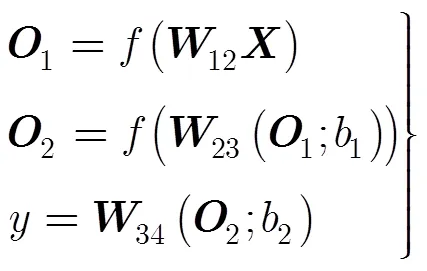
近些年隨著GPU并行計算和相關理論模型的發展以及大規模網絡訓練方法速度的提升,神經網絡獲得了極大的發展。根據待處理問題的不同,網絡具有不同的結構,其中前饋網絡具有分層結構,數據進入輸入層后經過網絡逐層傳播至輸出層,適用于高維回歸問題,在航磁補償問題中,合理地設計前饋網絡結構和網絡參數,可以較好地實現飛機干擾的去除。本文提出采用前饋網絡來實現全軸梯度數據的補償。
前饋網絡的網絡結構如圖2所示,其中隱層數量以及隱層節點數量根據實際問題進行調整,一般層數和節點數量越大,網絡的訓練計算越慢,回歸預測精度相對越高。針對航磁全軸總場梯度補償問題,實測數據的實踐結果表明:采用兩個隱層,每層計算節點1024個,可以很好地兼顧訓練速度和補償數據的精度。
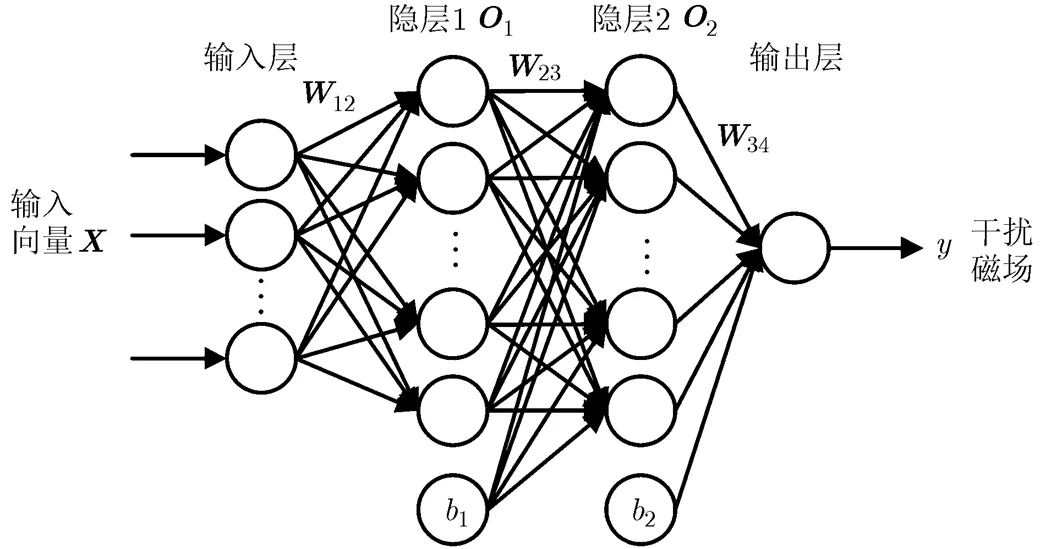
圖2 網絡結構圖
網絡采用ReLU作為激活函數,其表達式為

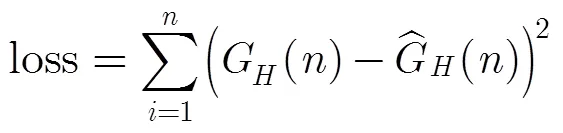
在前饋網絡計算中,由于采用的網絡節點規模較大,需要防止過擬合現象的發生,通過正則化的方式來避免網絡出現過擬合,式(7)代價函數可以改寫為

前饋網絡應用于全軸總場梯度數據補償時的處理流程圖,如圖3所示。
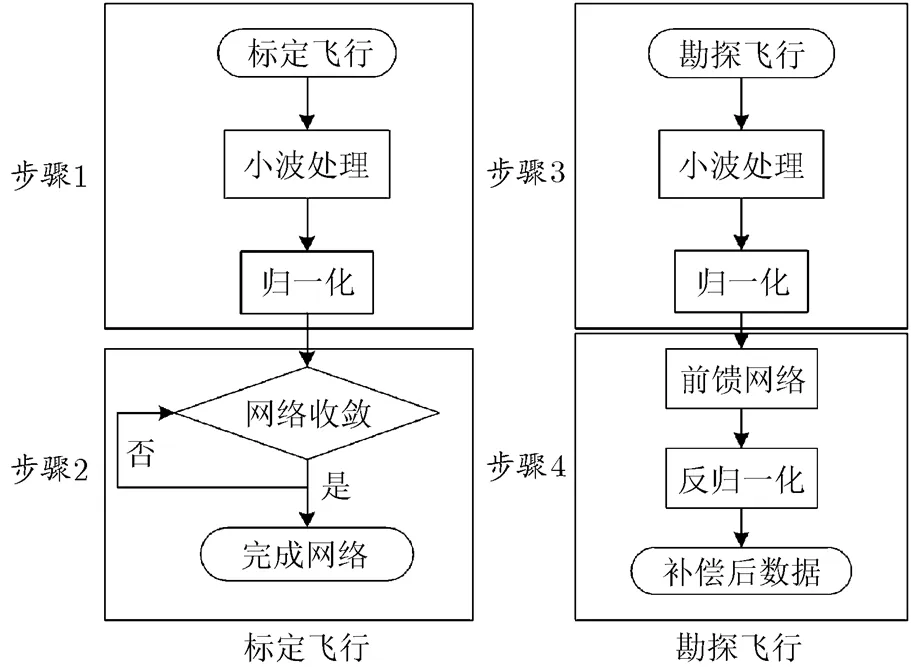
圖3 算法流程圖
具體的步驟如下:
步驟1 對標定飛行數據進行預處理操作,通過二進小波變換去除信號中高頻噪聲,保留位于同一頻帶的飛機磁干擾和地質磁異常信號。由三軸磁力儀的輸出獲得恒定磁干擾、感應磁干擾和渦流磁干擾組成的輸入向量。
其中恒定磁干擾的對應的特征向量為

感應磁干擾形成的特征向量為
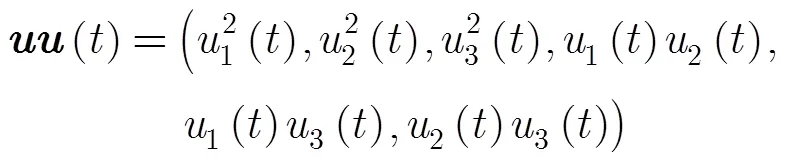
渦流磁干擾形成的特征向量為
將式(9)、式(10)和式(11)組合獲得網絡的輸入向量,表達式為

進一步將三軸磁力儀和光泵的數據歸一化,避免非歸一化數據由于自身幅值過大影響部分網絡節點的取值,導致網絡泛化性能下降甚至不收斂。歸一化操作的表達式為
步驟2 將步驟1中歸一化后的數據送入建立好的前饋網絡進行訓練。由于全軸磁總場梯度3個方向數據不同,數據結構相似,因此采用3個結構相同的網絡處理,網絡采用后向傳播算法迭代計算最優解,直到代價函數式(8)收斂到預期值,認為獲得收斂后的網絡,該網絡將在步驟4中作為補償網絡;
步驟3 對勘探飛行數據進行預處理操作,通過二進小波變換,去除信號中高頻噪聲和直升機旋翼混疊頻率,并對三軸磁力儀和光泵的數據執行步驟1中歸一化;
步驟4 步驟2中獲得的收斂網絡作為補償網絡,將步驟3中預處理后的數據送入網絡計算,并將網絡的輸出數據做反歸一化操作,獲得補償后的數據。
4 外場測試
4.1 實驗設計
實驗在山東昌邑鐵礦區開展,全軸磁總場梯度系統的垂直向基線長度為1.2 m,水平向基線長度為10.2 m,縱向基線長度為6.0 m,用于測量飛機姿態的三軸矢量磁力儀傳感器位于飛機桁架的前端。飛機的標定過程可以分為標定飛行和驗證飛行,兩者航跡采用矩形標定框,標定獲得的數據對網絡進行訓練,驗證飛行的數據對訓練好的網絡進行驗證,評估網絡的有效性及泛化能力。實驗中飛行航跡如圖4所示。
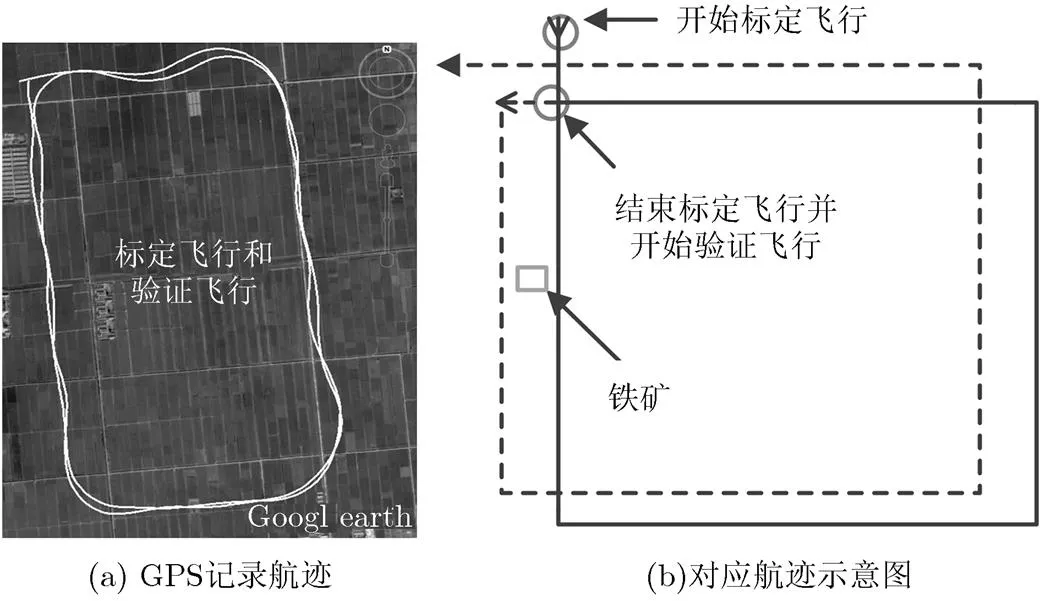
圖4 標定飛行與驗證飛行航跡
圖4(a)為GPS記錄的實際飛行航跡,圖4(b)為圖4(a)的示意簡圖,虛線表示標定飛行航跡,實線表示驗證飛行航跡。

4.2 標定飛行結果分析
在實驗中,受限于空域的申請和測區起降點的影響,該無人機全軸梯度系統的標定飛行受到一定的制約,標定飛行高度約為140 m,測線經過礦區,導致標定飛行數據中同時含有飛機磁干擾和測區磁異常信號。在前饋網絡的補償中,為了避免網絡對礦區磁異常信號的擬合,對網絡添加正則化因子如式(8)所示,通過弱化對標定飛行數據的擬合效果,達到提高網絡的泛化能力的目的。
通過本文補償方法處理,標定飛行和驗證飛行的數據如圖6所示。其中圖6(a)是飛機的垂向梯度標定飛行數據,圖6(b)是飛機垂向梯度驗證飛行數據;圖7(a)是飛機橫向梯度標定飛行數據,圖7(b)是飛機橫向梯度驗證飛行數據;圖8(a)是飛機縱向梯度標定飛行數據,圖8(b)是飛機縱向梯度驗證飛行數據。其中實線是補償前的數據,虛線是補償后的數據。


圖5 勘探飛行測線
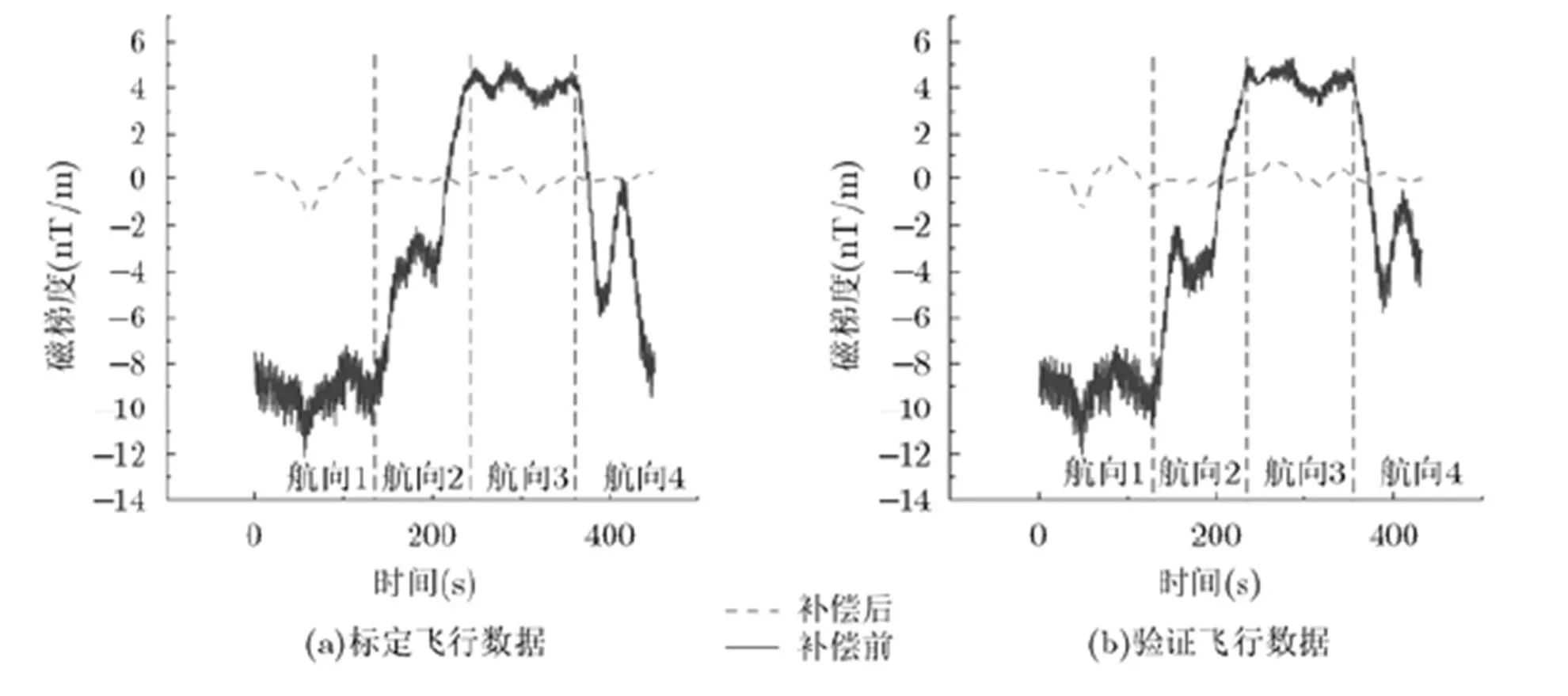
圖6 垂向梯度
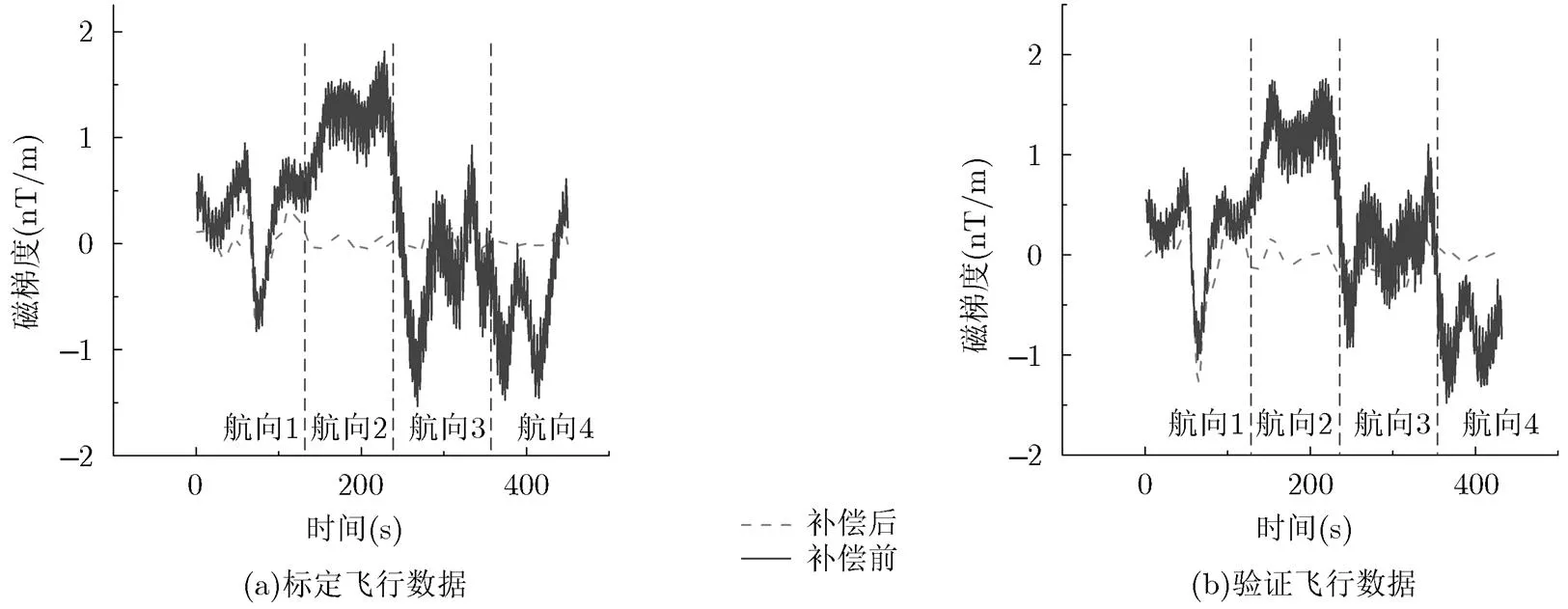
圖7 橫向梯度
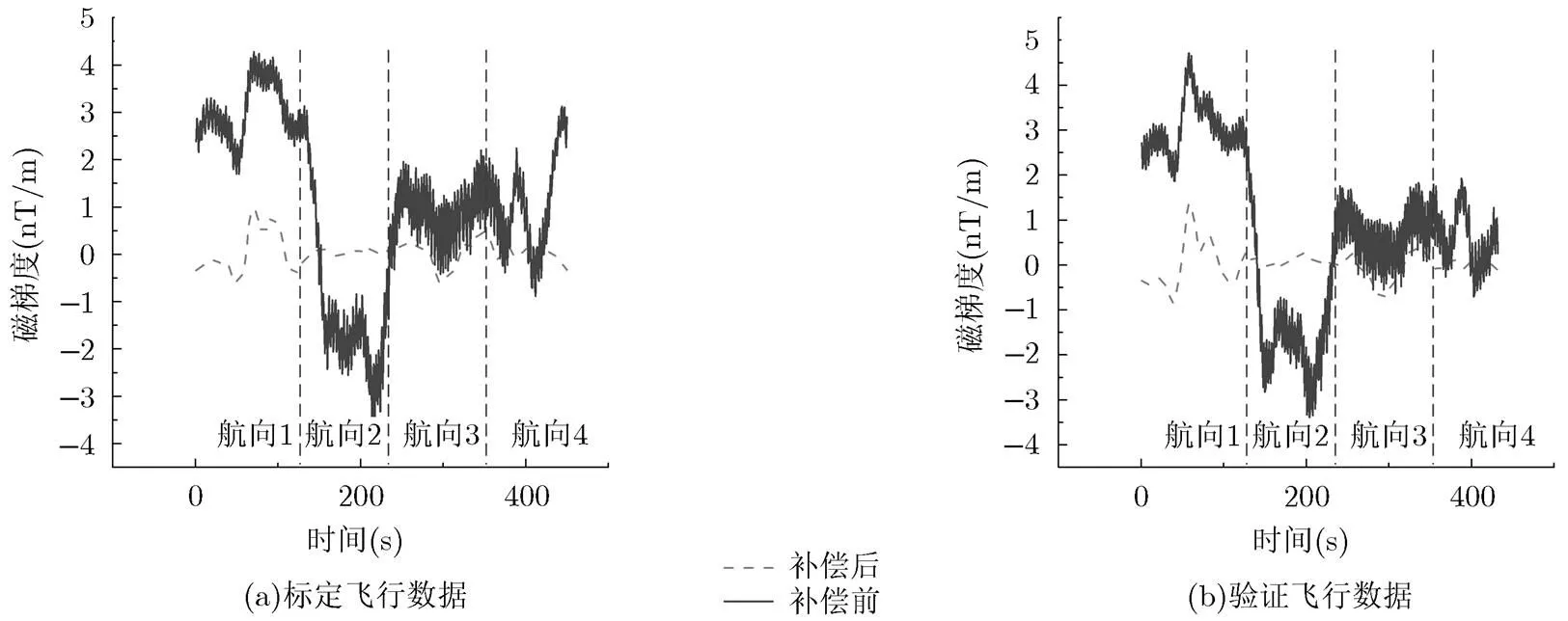
圖8 縱向梯度
4.2.1信號的標準差和提升比 在航磁數據評估中,常見的評估標準為標準差和提升比評估標準,補償信號的提升比定義為補償前信號的標準差和補償后信號的標準差的比值,其表達式為
標定飛行數據的標準差及信號提升比見表1所示。


補償前(nT/m)補償后(nT/m)IR 垂向梯度5.52470.363515.2 橫向梯度0.72670.1548 4.7 縱向梯度1.75770.2997 5.9
通過網絡實現補償后,飛機的干擾磁場可以獲得較好的抑制,全軸梯度數據質量的提升比分別為15.2, 4.7和5.9,數據質量有較好的提升。
4.2.2信號的峰值信噪比 由于礦區標定飛行采用IR評估具有一定的局限性,為了更準確地說明信號的提升幅度,在此采用峰值信噪比作為數據的評估標準。其表達式為
取0~100 s范圍內,礦區信號作為有效信號的峰峰值,取整段標定飛行信號中最小抖動段的方差作為對信號噪聲的估計,按式(15)計算信號的峰值信噪比。信號的PSNR結果如表2所示。

表2 PSNR結果(dB)
從表2中可見,通過網絡補償后,3個方向數據的PSNR的提升幅度分別為17.1 dB, 6.5 dB和6.5 dB,可見PSNR有著明顯的提升,數據中的噪聲獲得了較好的抑制,局部地質磁異常信號得到了保留。

式(16)的對稱表達式為
全軸梯度數據的交叉標定指數見表3所示。
表3交叉標定指數

垂向梯度1.02381.1633 橫向梯度1.15211.1190 縱向梯度1.18421.0268
4.3 勘探飛行結果分析
無人機全軸梯度系統在標定過程后進行探勘飛行,飛機的航跡見圖5所示。共11條測線。對測線數據進行2維成圖,其結果見圖9所示。
在原始數據成圖中,存在較多的波紋、條帶等干擾和噪聲,無法有效地分辨地質磁異常信號。利用本文的補償方法,使用標定飛行的數據獲得穩定的補償網絡,對勘探飛行的數據進行補償后,結果見圖10所示。
對比圖9和圖10,定性分析可見,圖中的條帶和干擾被有效地移除,地質磁異常信號可清晰地從圖中分辨。
定量評估中采用航磁規范中“航磁系統動態噪聲”作為評估方法,實現對圖9和圖10中11條測線數據質量的評估。首先將數據降采樣到航磁規范標準要求的2 Hz,采用式(18)計算系統動態噪聲:
式中,

由表4定量結果可見,補償后測線數據的系統動態噪聲遠低于補償前測線數據的系統動態噪聲,可見該補償方法對數據質量的提升有重要的作用,在實際數據處理中具有可行性和有效性。

圖9 原始數據成圖
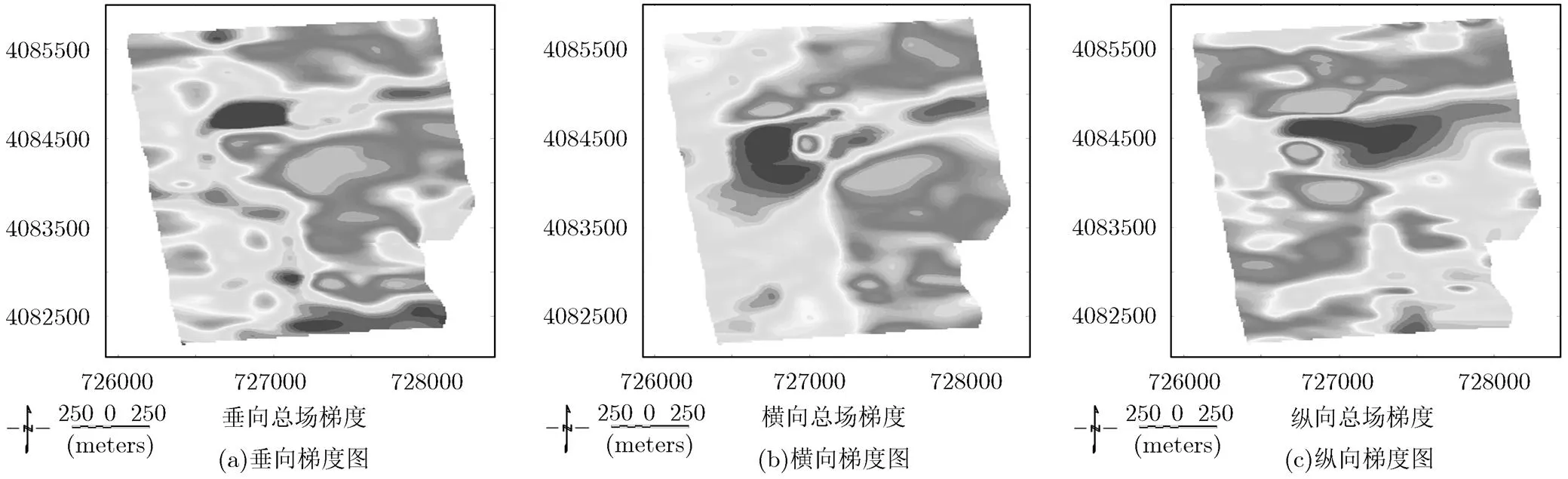
圖10 補償后數據成圖
表4測線系統動態噪聲(nT/m)
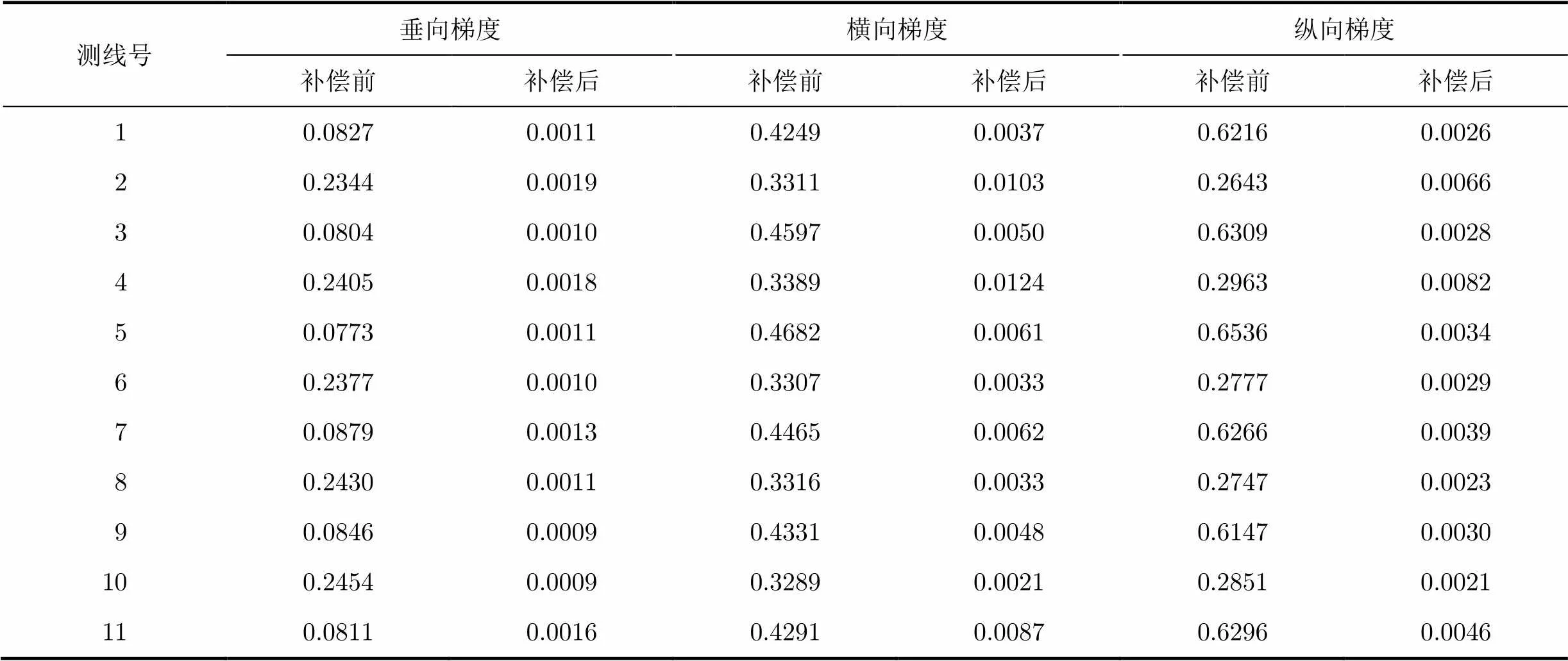
測線號垂向梯度橫向梯度縱向梯度 補償前補償后補償前補償后補償前補償后 10.08270.00110.42490.00370.62160.0026 20.23440.00190.33110.01030.26430.0066 30.08040.00100.45970.00500.63090.0028 40.24050.00180.33890.01240.29630.0082 50.07730.00110.46820.00610.65360.0034 60.23770.00100.33070.00330.27770.0029 70.08790.00130.44650.00620.62660.0039 80.24300.00110.33160.00330.27470.0023 90.08460.00090.43310.00480.61470.0030 100.24540.00090.32890.00210.28510.0021 110.08110.00160.42910.00870.62960.0046
5 結論
本文設計了一種基于無人機的全軸梯度磁異常勘探系統,并提出使用前饋網絡對無人機的磁干擾進行去除的方法。研究工作總結如下:(1)本文設計的基于無人機的全軸總場梯度系統可以穩定可靠地獲得數據,實現航空全軸總場梯度磁法勘探,山東昌邑鐵礦區的飛行實驗證明了系統的可行性和有效性。(2)基于前饋網絡的航磁補償算法,通過標定飛行數據訓練后具有較好的穩定性,以及泛化性能,能夠有效地去除飛機的干擾磁場,保留局部地質磁異常信號。全軸總場梯度數據補償質量的提升比分別為15.2, 4.7和5.9;峰值信噪比的提升分別為17.1 dB, 6.5 dB和6.5 dB,交叉標定指數符合補償要求,實現對磁測數據的高質量補償。礦區飛行實驗結果表明了該補償算法的正確性和有效性。
[1] NABIGHIAN M N, GRAUCH V J S, HANSEN R O,. The historical development of the magnetic method in exploration[J]., 2005, 70(6): 33ND-61ND. doi: 10.1190/1.2133784.
[2] HOOD P. History of aeromagnetic surveying in Canada[J]., 2012, 26(11): 1384-1392. doi: 10.1190/1. 2805759.
[3] DOLL W E, GAMEY T J, BELL D T,. Historical development and performance of airborne magnetic and electromagnetic systems for mapping and detection of unexploded ordnance[J].&, 2012, 17(1): 1-17. doi: 10.2113/ JEEG17.1.1.
[4] NORIEGA G. Aeromagnetic compensation in gradiometry- performance, model stability, and robustness[J].,2015, 12(1): 117-121. doi: 10.1109/LGRS.2014.2328436.
[5] HARDWICK C D. Non-oriented cesium sensors for airborne magnetometry and gradiometry[J].1984, 27(4): 266-267. doi: 10.1071/EG984266d.
[6] FORRESTER R, HUQ M S, AHMADI M,. Magnetic signature attenuation of an unmanned aircraft system for aeromagnetic survey[J]./, 2014, 19(4): 1436-1446. doi: 10.1109/TMECH. 2013.2285224.
[7] ZHANG B, GUO Z, and QIAO Y. A simplified aeromagnetic compensation model for low magnetism UAV platform[C]. IEEE Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 2011: 3401-3404. doi: 10.1109/ IGARSS.2011.6049950.
[8] HARDWICK C D. Aeromagnetic gradiometry in 1995[J]., 1996, 27(1): 1-11. doi: 10.1071/ EG996001.
[9] NELSON J B. Aeromagnetic noise during low-altitude flights over the scotian shelf: DRDC-ATLANTIC-TM-2002-089[R]. Dartmouth NS: Defence Research & Development Canada Atlantic, 2002, 1-40.
[10] TOLLES W E and MINEOLA N Y. Compensation of aircraft magnetic fields[P]. US, Patent, US2692970, 1954.
[11] TOLLES W E and MINEOLA N Y. Magnetic field compensation system[P]. US, Patent, US2706801, 1955.
[12] LELIAK P. Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft[J]., 1961, 8(3): 95-105. doi: 10.1109/TANE3.1961.4201799.
[13] LEACH B W. Aeromagnetic compensation as a linear regression problem[J]., 1980, 2: 139-161. doi: 10.1016/ B978-0-12-628750-9.50017-6.
[14] HARDWICK C D. Important design considerations for inboard airborne magnetic gradiometers[J]., 1984: 49(11): 2004-2018. doi: 10.1190/1.1441611.
[15] NELSON J B. Aircraft magnetic noise sources[C]. 8th International Congress of the Brazilian Geophysical Society, Brazilian, 2003: 41506.
[16] NELSON J B. Aeromagnetic noise from magnetometers and data acquisition systems[C]. 8th International Congress of the Brazilian Geophysical Society, Brazilian, 2003: 41507.
[17] NELSON J B. Predicting in-flight MAD noise from ground measurements: DREA-TM-2001-112[R]. Dartmouth NS: Defence Research Establishment Atlantic, 2002, 1-26.
[18] 駱遙, 段樹嶺, 王金龍, 等. AGS-863航磁全軸梯度勘查系統關鍵性指標測試[J]. 物探與化探, 2011, 35(5): 620-625.
LUO Yao, DUAN Shuling, WANG Jinlong,. Key indicators testing for AGS-863 three axis airborne magnetic gradiometer[J]., 2011, 35(5): 620-625.
[19] 駱遙, 吳美平. 位場向下延拓的最小曲率方法[J]. 地球物理學報, 2016, 59(1): 240-251. doi: 10.6038/cjg20160120.
LUO Yao and WU Meiping. Minimum curvature method for downward continuation of potential field data[J]., 2016: 59(1): 240-251. doi: 10.6038/ cjg20160120.
[20] 王林飛, 薛典軍, 段樹嶺, 等. 航磁軟補償動作規范性評價[J]. 物探與化探, 2016: 40(2): 365-369. doi: 10.11720/wtyht.2016. 2.21.
WANG Linfei, XUE Dianjun, DUAN Shuling,. The normative evaluation of aeromagnetic compensation action[J]., 2016: 40(2): 365-369. doi: 10.11720/wtyht.2016.2.21.
[21] 趙建揚, 林春生, 賈文抖, 等. 直升機平臺背景磁干擾建模與求解[J]. 華中科技大學學報(自然科學版), 2016, 44(2): 21-25. doi: 10.13245/j.hust.160205.
ZHAO Jianyang, LIN Chunsheng, JIA Wendou,Helicopter platform background magnetic interference modeling and solution[J].(), 2016, 44(2): 21-25. doi: 10.13245/j.hust.160205.
[22] 趙建揚, 林春生, 孫玉繪, 等. 直升機平臺背景磁干擾建模與特性分析[J]. 海軍工程大學學報, 2016, 28(1): 36-40. doi: 10.7495/j.issn.1009-3486.2016.01.008.
ZHAO Jianyang, LIN Chunsheng, SUN Yunhui,Modeling and characterization of helicopter platform background magnetic interference[J]., 2016, 28(1): 36-40. doi: 10.7495/ j.issn.1009-3486.2016.01.008.
[23] 張寧, 趙建揚, 林春生, 等. 直升機平臺背景磁干擾小信號模型求解與補償[J]. 電子學報, 2017, 45(1): 83-88. doi: 10.3969/ j.issn.0372-2112.2017.01.012.
ZHANG Ning, ZHAO Jianyang, LIN Chunsheng,Helicopter platform background magnetic interference small signal model solving and compensation[J]., 2017, 45(1): 83-88. doi: 10.3969/j.issn.0372-2112.2017. 01.012.
吳佩霖: 男,1988年生,博士生,研究方向為航磁數據補償算法及數據處理.
張群英: 女,1972 年生,研究員,博士生導師,研究方向為微波探測技術領域的新方法、新技術及新應用研究、微波成像信號處理與成像方法.
李 光: 男,1987 年生,博士生,研究方向為電磁勘探算法及數據處理.
劉麗華: 女,1981 年生,副研究員,研究方向為探地雷達及大功率發射機.
方廣有: 男,1963 年生,研究員,博士生導師,研究方向為超寬帶電磁學理論及其應用、超寬帶成像雷達技術、太赫茲成像新方法、新技術.
Research on Compensation Algorithm of Three AxisGradient Aeromagnetic Prospecting System
WU Peilin①②③ZHANG Qunying①③LI Guang①②③LIU Lihua①③FANG Guangyou①③
①(,,100190,)②(,100049,)③(,,100190,)
Aeromagnetic prospecting is an important method in geophysical prospecting for its high-efficiency and convenience. In the paper, a new kind of the three axis gradient system based on the unmanned helicopter is designed and an aeromagnetic compensation method based on the neural network is proposed. The system is equipped with four Optically Pumped Magnetometers (OPMs), from which the three axis gradient data can be achieved. In aeromagnetic compensation, the feedforward network is used. The Improvement Ratio (IR) of the three axis gradient data is 15.2, 4.7 and 5.9, respectively. The Peak Signal to Noise Ratio (PSNR) of the three axis gradient data is improved by 17.1 dB, 6.5 dB and 6.5 dB, respectively. Through the result of the Cross Calibration Index (CCI), the generalization ability of the method is good. The three axis gradient system and the aeromagnetic compensation are proven valid in aeromagnetic prospecting by an experiment.
Geophysical prospecting; Three axis gradient system; Aeromagnetic compensation; Optically Pumped Magnetometer (OPM); Unmanned helicopter
TH762.3
A
1009-5896(2017)12-3030-09
10.11999/JEIT170233
2017-03-20;
2017-09-01;
2017-11-01
通信作者:張群英 qyzhang@mail.ie.ac.cn
國家重大科研裝備研制項目(ZDYZ2012-1-03)
R&D of Key Instruments and Technologies of China (ZDYZ2012-1-03)