某鋁土礦低空無人機遙感測繪成果精度分析
2017-12-19 07:53:28賀躍光杜年春
測繪工程 2017年1期
劉 聰,賀躍光 ,陳 帥,杜年春
(1.長沙理工大學 交通運輸工程學院,湖南 長沙 410114 ;2.湖南工程職業技術學院,湖南 長沙 410151;3.中國有色金屬長沙勘察設計研究院有限公司,湖南 長沙 410011)
?
某鋁土礦低空無人機遙感測繪成果精度分析
劉 聰1,賀躍光1,陳 帥2,杜年春3
(1.長沙理工大學 交通運輸工程學院,湖南 長沙 410114 ;2.湖南工程職業技術學院,湖南 長沙 410151;3.中國有色金屬長沙勘察設計研究院有限公司,湖南 長沙 410011)
對于分布散、范圍大的鋁土礦區,傳統測量手段及時獲取滿足精度要求的礦區測繪資料具有一定難度。采用低空無人機遙感技術,能夠快速提供礦山建設所需要的數字線劃圖、數字高程模型及數字正射影像,實現礦山的數字化與信息化建設。結合某鋁土礦測繪面積大、礦區地物要素較少的測繪特征,通過無人機影像快速空三加密以及DLG,DEM,DOM的制作技術,獲得低空無人機遙感測繪成果。通過對解析空三加密點精度分析和GPS實測點檢查,表明測繪成果滿足1∶2 000測圖精度要求。
鋁土礦山;低空無人機遙感 ;空三加密;精度分析
鋁土礦是用來生產金屬鋁的原料。隨著科技進步,經濟發展,人類對于鋁的需求越來越大。2000年以來,全球每年對于鋁的需求量以5%~10%的比例逐步增加。我國雖然擁有豐富的鋁土礦資源,同時也是一個鋁金屬需求量大的國家[1]。根據我國鋁土礦藏和開采的特點,采取先進技術進行可持續開發利用,提高鋁土礦的利用率和采收率具有重要意義。
低空無人機遙感的應用,我國屬于起步較晚的國家,直到20世紀末,我國的第一部無人機才由中國測繪科學院牽頭研制出來,并完成無人機的關鍵性試驗。從事GPS無人機遙感研究多年的尹金寬[2]等人通過無人機采集數據來完善地形圖,完成公路選線的工作,證明低空無人機遙感在大比例成圖上的可行性。王鴻鴿[3]利用無人機航測在礦山測繪中的實際應用,獲得的數據精度完全滿足航測內業相關的測圖規范要求,使得低空無人機遙感測量在大比例尺測圖中的應用得以實現。從事多年礦山測量的張忠[4],結合多年的切身經驗,分析低空無人機遙感測量的特點和適用范圍,論述在礦山測量方面無人機測量的方法。李崇偉等對利用非量測型無人機影像開展大比例尺數字成圖進行探討[5]。
1 某鋁土礦山的特點及測量要求
某鋁土礦是大型巖溶堆積型鋁土礦,在面積為1 750 km2的區域內擁有5個礦區。鋁土礦的總儲量約為2億t。礦區內的鋁土礦主要有3種不同的礦床類型,分別為殘積型、原生沉積型和巖溶堆積型。其中礦石的主要類型為高鐵—水硬鋁石、中鋁等。堆積型鋁土礦一般產自第四紀紅土層中,巖層厚度一般為3~24 m左右,表現為明顯的三元結構[6]。
某鋁土礦主要存在于地層表面,露天堆積,礦土共存,具有分布散,分布范圍廣等成礦特征。對于獲取礦區的地形資料而言,作業面積廣,礦區覆蓋面大。礦區測繪主要是建立礦區的測量控制網、測繪或補測礦區的地形圖,進行地上地下各種工程的施工監測,反映各種生產現狀的采掘工程圖和專用圖,驗收采掘(剝)充填工程量和生產量。而作為鋁土礦區的基礎之一的地形圖,其資料的準確性和實時性直接影響到后期的礦山建設和生產。
使用先進的無人機駕駛技術、遙感傳感器技術、遙測遙控技術、GPS差分定位技術和通訊技術等相配合組成的無人機遙感技術,能夠方便快捷獲取有關地理信息、自然資源和空間環境等信息,完成對遙感數據的處理、建模、分析及應用。低空無人機憑借其操作簡便、靈巧、組裝方便、易于攜帶等優勢被廣泛應用于地理國情、地質災害等監測中,取得較好效果,同時低空無人機遙感在鋁土礦山測繪中具有較強適應性。
傳統的鋁土礦山測量采用各種測量技術,對礦區進行地形數據采集。隨著時代進步,對礦山測繪的需求也越來越高。有異于傳統測繪,現代礦山測繪不僅包括礦區地物地貌幾何關系數據采集,還包括各種目標地物信息采集,如目標區域影像數據采集和處理,目標范圍內基本現狀、環境等監測工作。所以低空無人機遙感技術的發展,對于現代鋁土礦山測量,具有很好的應用前景[7]。
鋁土礦山地形成圖比例尺一般小于1∶2 000,同時礦區地物要素較少,對地物精度要求不是很高。雖低空無人機在飛行姿態和影像質量方面存在局限性,使用低空無人機遙感進行數字礦山的測繪完全能夠滿足鋁土礦山建設與生產的要求[8]。根據礦山測量規范及某鋁土礦山的地形測繪基本要求,采用北京54坐標系、黃海高程為基準,成圖比例尺為1∶2 000[9-11]。具體技術參數如表1~表3所示。
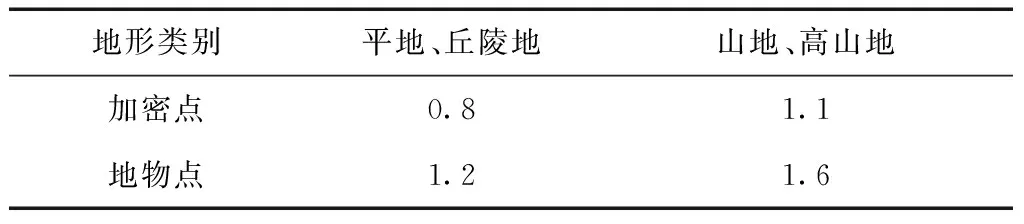
表1 DLG平面中誤差 m
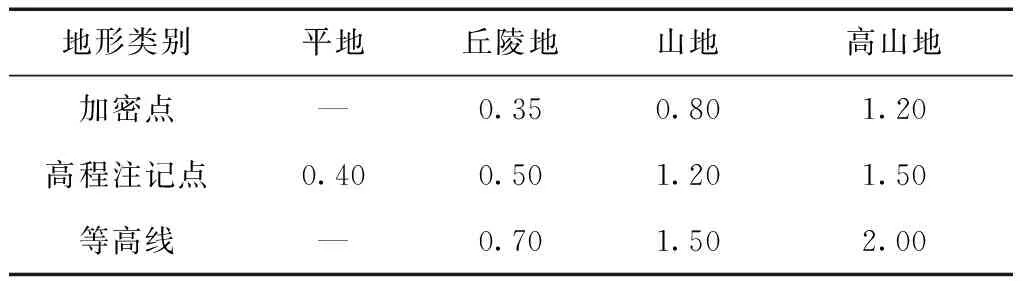
表2 DLG高程中誤差 m
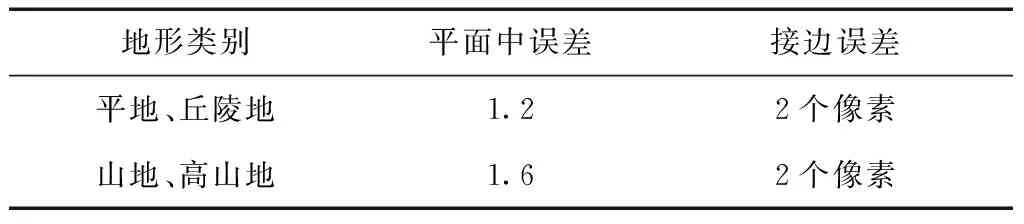
表3 DOM平面位置中誤差 m
2 低空無人機遙感測繪應用
2.1 無人機影像快速空三加密
1)數據準備。根據航飛示意圖,準備所有影像及其連接模型,存放在文件夾image。
2)工程自動內定向。內定向是根據像片框標及相機參數,恢復相機與影像的相對位置。內定向的目的是建立像方坐標系。通過空中三角測量軟件DATmatrix,導入相片的框標坐標和相應攝影機的待定參數。
3)連接點的自動提取。DATmatrix包含有自動轉點功能,根據要求逐個對相鄰兩張影像進行同名點的選取,生成影像連接點。工程的所有影像進行內定向后,執行自動轉點操作。
4)交互編輯。自動轉點產生大量連接點后,在工程區域四周的影像上刺入外業GPS控制點(屬性設置為控制點,輸入相應的坐標數據),查看在平鋪視圖下影像連接點的分布情況,在影像上缺少連接點的地方人工添加點,編輯、刪除不好的連接點之后,進行patb初次平差。了解連接點的精度情況,應查看是否有影像局部上沒有連接點,或者航帶間沒連接點等情況,補充連接點,編輯爭議點列表里的點,刪除誤差過大的爭議點,進行平差解算。多次平差解算后,在patb界面上重新設置sigma值,迭代運算后sigma的新取值應與之前解算設置sigma值相同,平差解算后編輯爭議點信息,直到沒有爭議點。
5)空三加密。根據空三的預覽功能,將連接點剔除后,接下來進行空中三角測量。在數據迭代過程中會出現無法完成,或者誤差較大的情況,對此可通過調節權重的大小,反復試驗幾次,剔除誤差較大的點后,設置權值與影像分辨率接近的值,然后通過patb完成空三加密。
6)輸出空三成果。在DATmatrix軟件中,將空三加密處理成果(.xml)文件導出,以便后期DLG、DEM、DOM等的制作。
2.2 DLG、DEM、DOM的制作
1)制作DLG。根據前面的空三成果,在Mapmatrix上建立影像的立體模型,調用Featureone特征采集工具,進行數字化測圖,輸出DLG成果。
2)制作DEM。在區域網平差結果滿足作業要求的基礎上,可以根據定向的結果進行核線重采和樣影像匹配。設置好格網間距和等高距生成DEM,也可以通過數字線劃圖生成數字高程模型。
3)制作DOM。先對影片進行勻光、勻色,然后通過數字高程模型,在易平圖軟件上對正射影像拼接、裁剪,最后對正射影像變形區域,通過糾正過后的原始影像進行修護,得到DOM。
2.3 精度分析
2.3.1 理論精度
空三加密采用光束法局部平差法,用軟件patb完成。本工程文件夾下會自動生成平差報告文件(.pri),打開(.pri)文件查看解算精度及是否有警告或錯誤信息[12]。報告包括初始定向參數、初始地面坐標、像點的坐標及殘差,控制點的坐標及殘差,加密點坐標。平差報告如圖1、圖2所示。
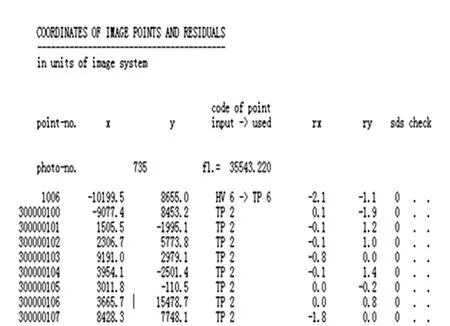
圖1 像點坐標及殘差
圖1記錄的是像點的坐標及殘差,sigma naught 2.02=0.053,表示記錄像點精度為2.02,單位u,0.053單位為m,如果rx,ry或者rz的值大于3倍中誤差時,會出現*當成粗差點處理,組號設置成21。由圖1可知,本次像點中誤差在1/2個像素以內,滿足連接點的精度要求。
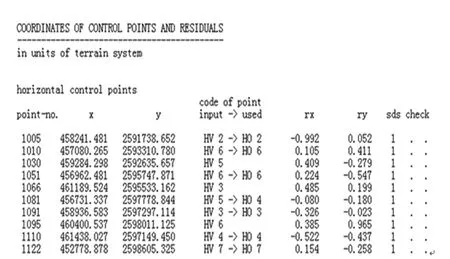
圖2 控制點的坐標及殘差
圖2記錄的是像點的坐標及殘差。最后兩列代表殘差與中誤差的比值,如果比值小于1,用“.”標記。
2.3.2 實測精度分析
區域網平差計算結束后,對于成果加密的中誤差一般采用檢查點(多余相片控制點,不參與平差)的中誤差進行估算,對于某鋁土礦,在進行控制點位判刺時,通過刺入檢查點,同時將檢查點的權值設為0,用平差軟件進行平差。通過分析檢查點的GPS外業量測坐標與對應位置加密點的坐標數據,比較兩者坐標數據差值,計算平面點位的中誤差。精度分析見表3。
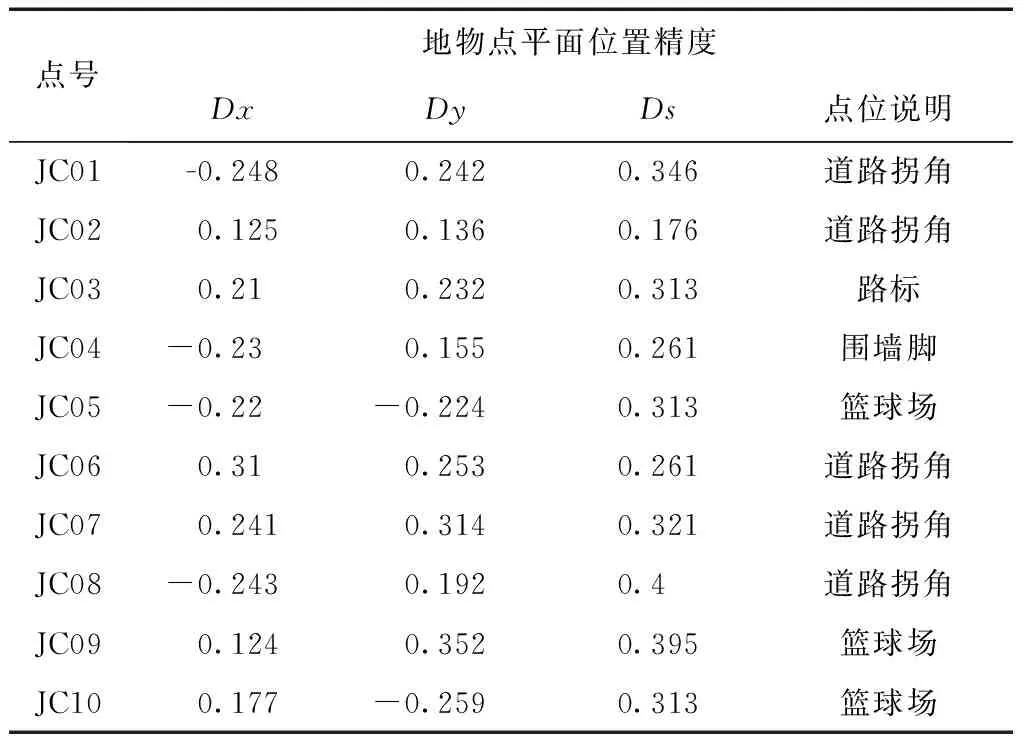
表3 精度分析表 m
由圖3可以看出,檢查點的點位誤差在0.5 m以內,滿足規范2倍點位誤差的要求。
根據中誤差算式
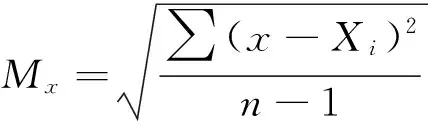
得出X方向的點位中誤差Mx=0.230 498,Y方向的點位中誤差My=0.256 616,平面點位中誤差:Ms=0.344 897。根據《低空數字航空攝影測量規范》與《低空數字航空攝影測量內業規范》,1∶2 000地形圖單點定位的絕對精度為0.5 m,此次精度完全滿足礦山測量對數據的要求。
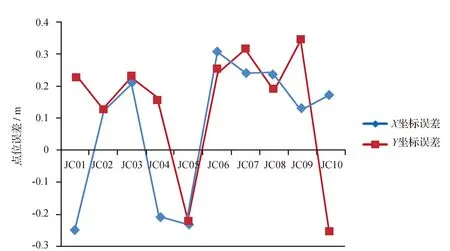
圖3 點位誤差分布
3 結束語
分析鋁土礦山的特點及測繪要求,運用低空無人機遙感技術,生成3D成果產品,分析低空無人機遙感技術在鋁土礦山測繪中的應用。通過光束法局部平差、GPS外業坐標數據與檢查點的坐標數據分析,結合這兩種方法,并對低空無人機遙感的成果精度進行分析,得出完全滿足精度要求的礦山成果數據,成功地將低空無人機遙感技術應用到鋁土礦山的測繪中。
[1] 楊珊.平果堆積型鋁土礦廠址選擇優化研究[D].長沙:中南大學,2009.
[2] 尹金寬,林宗堅,鄧洪亮,等.UAVDP技術在道路工程應用中的可行性研究[J].測繪科學,2008(1):144-146.
[3] 王鴻鴿.無人機航測在礦山測繪中的實際應用[J].技術與市場,2014(9):55.
[4] 李崇偉,楊豐栓,武堅,等.非量測型無人機影像快速大比例尺數字成圖探討[J].測繪與空間地理信息,2015,39(2):114-116.
[5] 張忠,何宏偉,張建文.基于低空遙感的礦山測量技術研究[J].科技創新導報,2013(10):90.
[6] 王瑞湖,李梅,蒙永堅.廣西堆積型鋁土礦成礦特征與資源潛力預測[J].地質通報,2010(10):1526-1532.
[7] 段福洲.近地輕型數碼航空攝影測量系統研究[D].北京:首都師范大學,2007.
[8] 王有業.無人機技術在數字礦山中的應用[J].山西焦煤科技,2012(12):45-47.
[9] 王歡,蔣顯嵐.4種無人機遙感影像快速拼接方法的試驗分析[J].測繪與空間地理信息,2015,38(8):117-118.
[10] 國家測繪局.基礎地理信息數字成果1∶500 1∶1 000 1∶2 000數字線劃圖:CH/T 9008.1-2010[S].北京:測繪出版社,2010.
[11] 國家測繪局.基礎地理信息數字成果1∶500 1∶1 000 1∶2 000數字正射影像圖:CH/T 9008.3-2010[S].北京:測繪出版社,2010.
[12] 曹輝.智能空中三角測量中若干關鍵技術的研究[D].武漢:武漢大學,2013.
[13] 高文革,范永杰,宋倩,等.空三加密在數字攝影測量中的精度分析[J].山東國土資源,2010(12):26-29.
[責任編輯:張德福]
Precision analysis of low-altitude UAV remote sensingmapping results in the bauxite
LIU Cong1,HE Yueguang1,CHEN Shuai2,DU Nianchun3
(1.School of Communication and Transportation Engineering,Changsha University of Science and Technology,Changsha 410114,China; 2.Hunan Engineering Polytechnic,Changsha 410151,China; 3.Changsha Survey and Design Institute of China Nonferrous Metals Co.,Ltd,Changsha 410011,China)
For the distribution of scattered,large-scale bauxite area,it is hard for traditional measurements to have timely access to the mine surveying and mapping data which can meet the accuracy requirements.The low-altitude UAV remote sensing technology is proposed to provide rapid DLG,DEM and DOM for mine construction in order to complete the digital and information construction of the mine.The paper combines the characteristics of a large bauxite area,and less feature elements of mine with the UAV images quickly air triangle encryption and DLG,DEM,DOM production technology,to have access to low-altitude UAV remote sensing and mapping results.Through the theoretical analysis of data precision adjustment and GPS actual accuracy analysis,it shows that mapping results comply with the 1∶2 000 mapping accuracy.
bauxite mountain; low altitude UAV remote sensing; air triangle encryption; accuracy analysis
引用著錄:劉聰,賀躍光,陳帥,等.某鋁土礦低空無人機遙感測繪成果精度分析[J].測繪工程,2017,26(1):17-20.
10.19349/j.cnki.issn1006-7949.2017.01.004
2015-10-21
劉 聰(1991-),男,碩士研究生.
P237
A
1006-7949(2017)01-0017-04
猜你喜歡
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
