基于直線特征檢測的道路邊線自動提取方法
2017-12-22 03:18:58閆兆進孟麗娜
測繪工程 2017年3期
關鍵詞:檢測
閆兆進,孟麗娜
(1.山東科技大學 測繪科學與工程學院,山東 青島 266590;2.中國民航大學 機場學院,天津 300300)
?
基于直線特征檢測的道路邊線自動提取方法
閆兆進1,孟麗娜2
(1.山東科技大學 測繪科學與工程學院,山東 青島 266590;2.中國民航大學 機場學院,天津 300300)
針對如何從車載激光點云數據中快速、準確地提取道路邊線的問題,本文提出一種基于直線特征檢測的道路邊線自動提取方法。首先對原始點云進行地面濾波,刪除非地面點,獲取包含道路信息的地面點云,接著把點云投影到二維圖像上,根據反射強度獲得平均強度圖像,對平均強度圖像進行LSD直線檢測,獲得道路邊線的直線段,然后進行直線連接,把檢測出來的短線段連接成長直線,最后根據直線特征提取出道路邊線,并且利用定量指標對提取結果進行定量分析。實驗證明,該方法提取的道路邊線具有較高的準確率和完整性。
車載激光掃描;點云;道路邊線;自動提取;LSD直線檢測;定量分析
車載移動測量采集的點云信息數據量十分龐大,給道路邊線的自動提取帶來巨大挑戰[1]。為了快速、高效地提取道路邊線,國內外學者進行了大量研究,提出了很多方法。DC Hernandez 等利用聚類分析和隨機一致性算法直接識別路面[2],但由于原始點云中存在大量冗余信息,導致算法耗時較長且精度較低;Yeonsik Kang等使用卡爾曼濾波器提取道路邊界信息[3],但需要設置多個檢測閾值,計算較復雜;譚賁等根據車行軌跡和相同掃描線上相鄰點之間的斜率來提取路面[4];王果等通過比較點云鄰域來提取高速公路的道路邊線[5];魏雙全等利用先驗知識從點云中提取道路信息[6-7],通過行車軌跡提取道路主軸線,然后以主軸線為基準進行平面生長。現有的研究方法中很少對提取結果進行量化評估,然而在道路網建設工程中,精度是必須考慮的指標。針對上述問題,本文提出一種基于直線特征檢測的道路邊線快速提取方法,并且利用準確率(Accuracy Rate,AR)、完整率(Completion Rate,CR)和F-Measure三個定量指標對提取結果進行定量分析。實驗證明,本文提出方法具有非常高的精度。
1 道路邊線自動提取算法
首先對原始點云數據進行地面濾波,接著對濾波后的點云進行投影,得到平均強度圖像,同時利用LSD直線檢測算法檢測強度圖像中的直線段,通過直線連接把檢查出來的短線段連接成長的直線,最后通過直線特征匹配檢測出道路邊線,并且對提取出來的道路邊線進行定量分析。本文算法的流程如圖1所示。
1.1 地面濾波
由于車載移動測量系統采集的是離散分布的點云數據,并且數據量十分龐大,為了在道路邊線提取過程中減少算法的處理時間和保證提取結果的精度,在進行道路邊線提取之前,首先對原始點云進行地面濾波,去除非地面點,只保留包含道路信息的地面點數據。

圖1 算法流程
由于基于坡度的濾波算法[8-10]計算簡單、適應性強易于實現,因此采用基于坡度的濾波方法實現對原始點云的濾波處理。基于坡度的濾波方法,其基本思想是對于給定的坡度閾值,隨著兩個激光點之間距離的臨近,激光點的高程越大屬于地物點的可能性就越大[11]。假設E為原始點云數據集,D為地面點云數據集,則滿足式(1)的點就為地面點,即
D={xi∈E|?xi∈E:hxi-hxj≤
Δhmax[d(xi,xj)]}.
(1)
式中:xi,xj為原始點云數據集中的任意點;hxi,hxj分別為點xi和xj的高程值,Δhmax[d(xi,xj)]為濾波核函數,即兩點間高差的閾值。該方法主要是通過比較兩個激光點之間高差的大小,來判斷待定點是否為地面點。本文實驗中設置的坡度閾值為0.2 m,判斷距離設為3 m。原始點云的高程渲染圖如圖2(a)所示,地面濾波之后的點云高程渲染圖如圖2(b)所示。

圖2 處理過程結果
1.2 生成平均強度圖像
為了進一步減小道路邊線提取的難度,本文把三維點云投影到二維圖像上進行處理,并且根據每個點的反射強度生成強度圖像。為了避免點云在投影之后產生仿射變形,采用等間隔采樣進行投影,即在X方向和Y方向的采樣間隔相同。得到點云平均強度圖像的步驟:
1)遍歷點云數據集中所有的點,記錄下X坐標和Y坐標的最大、最小值,即xmax,xmin,ymax和ymin;
2)計算投影圖像的大小。投影圖像的長度H為ymax和ymin的差值,即Y方向的范圍;投影圖像的寬度W的xmax和xmin差值,即X方向的范圍;
3)格網分塊。按照步長l把投影圖像劃分為不同的格網,對于任一點(x,y,z),其對應的格網行列號的計算
(2)
式中:r為格網行號,c為格網列號,(int)表示取整運算。
4)平均網格內所有點的強度。遍歷格網分塊后的所有網格,如果網格內點的個數大于0,則把該網格中的所有點的強度用其平均強度來代替;如果網格內點的個數等于0,則跳過。平均強度IE的計算
(3)
式中:Ixi表示該點原始的強度值,n表示該網格內包含點的總數。
5)生成平均強度圖像。根據平均后的強度進行重采樣,得到平均強度圖像。生成的平均強度圖像如圖2(c)所示。
1.3 LSD直線檢測
LSD直線檢測算法由Von Gioi等最早提出[12],同傳統的Hough變換直線檢測算法相比,LSD算法主要有幾個優點:一是檢測過程中不依賴于參數,更適合進行自動檢測;二是檢測速度快,能在較短時間內獲得亞像素級的結果;三是錯檢率低,更適合在復雜場景中應用[13]。基于上述優點,因此本文選擇用LSD算法來檢測線段,而不是利用Hough變換進行直線檢測。
LSD直線檢測后的結果如圖2(d)所示。從圖中可以看出,經過LSD直線檢測處理后,檢測出來的線段會在道路連接處出現斷裂,造成檢測的道路邊線不是一條長直線,而是多條短線段,這是因為LSD算法以梯度特征為基礎,因此在道路連接處形成斷裂,所以需要把檢測得到的短線段進行直線連接形成長直線。
1.4 直線連接
直線連接的基本原理是比較兩條直線段之間的相對關系(如共線性和接近度等),如果滿足一定的條件就把這兩條短線段連接成一條長直線。接近度用兩條直線段之間的最短距離來衡量;共線性是指兩條直線段之間的接近度已經滿足了設定的閾值,并且它們之間的角度也滿足一定的角度閾值。如圖3所示,假設屬于道路邊線上的兩條直線段被檢測出來,分別命名為線段AB和CD。連接這兩條線段的四個端點,假設連接之后的線段AD為最長的直線,設線段AB與線段AD之間的夾角為α,線段AD與線段CD之間的夾角為β,如果滿足下列條件,則認為線段AB與線段CD是共線的。判別條件:
1)α-β<θ1;
2)α<θ2&β<θ2;
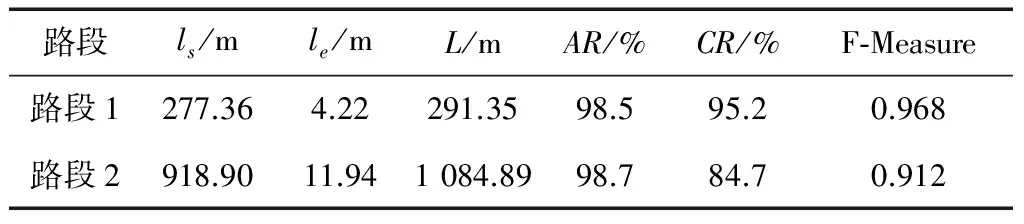
3)AD-AB-CD 其中,θ1和θ2為角度閾值,L為長度閾值。當線段AB與線段CD滿足上述條件時,就用連接后的線段AD代替線段AB和線段CD。經過直線連接處理后的道路邊線將變得十分完整,用下一步的提取處理,見圖3。 圖3 直線連接原理 1.5 直線特征匹配 由于道路具有一定的長度,因此可以設定一個長度閾值,刪除直線連接后較短的線段,從而減少后續操作的計算量,節省算法的處理時間。道路邊線總是成對存在且滿足一定的幾何關系,根據道路邊線特定的幾何特征,進行直線特征匹配,以此提取出道路邊線。直線特征匹配的條件: 1)兩條長直線的重合度需要滿足一定的閾值; 2)兩條長直線之間的距離需要滿足一定的閾值; 遍歷所有的直線,如果滿足上述條件,則認為這兩條直線為道路邊線,然后進行輸出。提取出來的道路邊線結果如圖2(e)所示。 1.6 定量評價 為了定量分析提取結果的好壞,本文選用準確率、完整率和F-Measure三個定量指標進行評價。 準確率的定義 (4) 式中:ls為提取出來的結果中屬于道路邊線的長度,le為提取出的結果中不屬于道路邊線的長度。 完整率的定義 (5) 式中:L為道路邊線的實際長度,通過人工多次測量取平均值的方式確定。 F-Measure[14]的定義 (6) 式中:α為參數,AR為準確率,CR為完整率。F-Measure的值越高,說明試驗方法越有效。本文采用α=1的F-Measure公式,即 (7) 實驗中所用的數據為車載移動測量系統采集的城市數據,包括道路、建筑物、樹木、電力線等,實驗區域大小為1 100 m×363 m,共包括18 577 669個點。實驗區域包括兩條路段,路段1為居民區小道,路段2為城市主干道。兩條路段提取出的道路邊線與原始點云數據進行疊加,顯示結果如圖4所示,兩條路段的定量分析結果如表1所示。 圖4 提取結果 路段ls/mle/mL/mAR/%CR/%F?Measure路段1277.364.22291.3598.595.20.968路段2918.9011.941084.8998.784.70.912 由表1可以看出,路段1和路段2的準確率分別為98.5%和98.7%,證明本文方法無論是在居民區小道還是城市主干道,道路邊線的提取結果都具有非常高的精度。同時看出路段1的完整率比路段2的完整率高了10.5%,這是因為居民區內的道路車流量較少,城市主干道上車流量較大,導致道路邊線的點云被行駛的車輛遮擋較多,造成路邊完整率下降,因此在數據采集過程中,應該盡量選擇車流量較少的時段進行作業。在對實驗區域的兩條路段進行提取時,F-Measure的值都在0.9以上,證明了該方法的有效性。由于本文采用的車載移動測量是以汽車為載體,因此,在相對狹小的居民區小道,由于道路寬度限制無法進行數據采集,所以該方法主要適用于城市主干道的道路邊線自動提取。綜上可知,對于城市主干道,本文算法在提取道路邊線時,具有較高的完整率和非常高的精度。 本文以車載移動測量系統采集的三維點云數據為研究對象,提出了一種基于直線特征檢測的道路邊線快速提取方法,并且利用三個定量指標對提取結果進行了定量分析。通過檢測出的道路邊線與原始點云的疊加顯示,定性說明了提取位置的準確性;通過計算實驗區域內兩條路段檢測結果的準確率、完整率和F-Measure,定量證明了該方法的精度。實驗證明,無論是定性還是定量分析,本文方法都能從車載移動測量道路點云中準確、高效地提取出道路邊線。另外,路面標線也是道路信息的重要組成部分,因此下一步的研究是如何快速、準確的識別道路標線。 [1] 黃解軍,潘和平,萬幼川. 構建智能交通推動數字城市的發展[J]. 城市規劃匯刊,2002(3):69-72. [2] HERNANDEZ D C,FILONENKO A,SEO D,et al. Lane marking recognition based on laser scanning[J]. IEEE International Symposium on Industrial Electronics,2015:963-965. [3] YEONSIK K,CHIWON R,SEUNG-BEUM S,et al. A Lidar-Based Decision-Making Method for Road Boundary Detection Using Multiple Kalman Filters[J]. IEEE Transactions on industrial electronics,2012,59(11):4360-4368. [4] 譚賁,鐘若飛,李芹.車載激光掃描數據的地物分類方法[J].遙感學報,2012,16(1):58-66. [5] 王果,崔希民,袁德寶,等. 車載激光點云領域比較的道路邊線提取方法[J]. 測繪通報,2012(9):55-57. [6] 魏雙全,房華樂,林祥國. 先驗知識引導的車載激光掃描點云道路信息提取[J]. 測繪科學,2014,39(10):81-84. [7] 田茂義,李鵬飛,俞家勇,等. 格網鄰域濾波在車載激光點云道路邊線提取中的方法研究[J].測繪與空間地理信息,2016,39(5):8-10. [8] VOSSELMAN G. Slope based filtering of laser altimetry data[J]. International Archives of Photogrammetry & Remote Sensing,2000,33(3):1058-1064. [9] 王金亮,陳聯君. 激光雷達點云數據的濾波算法述評[J]. 遙感技術與應用,2010,25(5):632-638. [10] 唐德瑾,王楠,張振華,等.一種改進的坡度機載LiDAR數據濾波算法[J].測繪信息與工程,2010,35(3):15-16. [11] 劉艷豐,王守彬,湯仲安,等. 基于k-d樹的機載LIDAR點云濾波處理[J]. 測繪工程,2009,18(5):59-62. [12] VON GIOI R G, JAKUBOWICZ J, MOREL J M,et al. lsd: A fast line segment detector with a false detection control. IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(4):722-732. [13] 李海,張憲民,陳忠. 基于直線檢測的棋盤格角點自動提取[J]. 光學精密工程,2015,23(12):3480-3489. [14] 何勝,柳益君,葉飛躍,等. 基于F-measure的網絡布局評測算法實現[J]. 計算機工程,2015,41(7):129-132. [責任編輯:李銘娜] Automatic extraction method of road sideline based on linear feature YAN Zhaojin,MENG Lina (1.School of Geomatics, Shandong University of Science and Technology, Qingdao 266590, China; 2.School of Airport ,Civil Aviation University of China,Tianjin 300300,China) To quickly and accurately extract the road sideline from vehicle-borne laser point clouds, this paper puts forward an automatic extraction method. First, this paper filters the ground of original point clouds and removes non-ground points to obtain the ground point clouds that contain road information; second, transforms point clouds into 2D image based on average intensity projection; third, detects the road sideline segment edges in image by LSD algorithm; then, the short line segments are connected to the long line through the line connection; finally, extracts road sidelines through the line features. And, the quantitative indicators used in the extraction results are quantitatively analyzed. The experimental results show that this method has high accuracy and integrity. vehicle-borne laser scanning; point cloud; road sideline; automatic extraction; LSD line detection; quantitative analysis 10.19349/j.cnki.issn1006-7949.2017.03.009 2016-03-28; 2016-04-28 閆兆進(1991-),男,碩士研究生. TN957.71 A 1006-7949(2017)03-0042-04 引用著錄:閆兆進,孟麗娜.基于直線特征檢測的道路邊線自動提取方法[J].測繪工程,2017,26(3):42-45.
2 實驗結果與分析

3 結 論
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
