雙足機器人的兩種步態規劃的解耦分析及比較
2018-01-02 08:44:16許江淳岳秋燕余麗玲
軟件 2017年12期
任 杰,許江淳,岳秋燕,余麗玲
(昆明理工大學 信息工程與自動化學院,云南 昆明 650500)
雙足機器人的兩種步態規劃的解耦分析及比較
任 杰,許江淳,岳秋燕,余麗玲
(昆明理工大學 信息工程與自動化學院,云南 昆明 650500)
在雙足機器人行走步態規劃的研究中,首先對前進方向和側面擺動進行解耦,建立運動學數學模型,運用 ZMP穩定性判據作為雙足機器人行走穩定性判斷標準,利用時序構造函數法和三次樣條插值法對雙足機器人運行步態進行規劃。利用matlab軟件編程和仿真,能夠體現出不同規劃方法下步行狀態在時間和空間的特征,仿真結果對比表明,利用三次樣條插值法的步態規劃,能夠更好的反映出雙足機器人的步行穩定性。
雙足機器人; 時序構造函數; 三次樣條插值; 步態規劃
0 引言
現如今對雙足機器人的研究熱度變得越來越高,對比輪式或履帶式機器人,平面雙足機器人更能反映出色的穩定性和可控性,其高度的擬人特性使得雙足機器人能夠廣泛應用于工業制造、教學科研、生活娛樂、醫療康復等領域。而雙足機器人是一個高階、強耦合、非線性的復雜系統,其行走時的步態規劃是雙足機器人的關鍵技術之一[1]。本文應用時序構造函數法和三次樣條插值法對雙足機器人的步態進行規劃,進行運動解耦分析,并對比不同步態規劃方法的優勢劣勢,以及他們對雙足機器人的運動情況的影響,并在此基礎上進行雙足機器人的穩定性分析。
1 雙足機器人模型的建立
廣義坐標法是一種廣泛適用的分析方法,它可以用最少的參數和較為統一的方式來描述系統,應用起來較為方便直觀,而且可以與許多重要概念及方程的使用相結合。采用廣義坐標法對雙足機器人進行建模時,可以參照人類下肢的結構和運動特點。經過對比和分析,設定雙足機器人的小腿和大腿各為一根密度均勻的剛體連桿,每根連桿之間可活動的連接部分即為運動關節。在踝關節設置兩個旋轉自由度,以實現腳面的前向俯仰和側向翻轉;髖關節設置三個旋轉自由度,分別實現大腿的前向俯仰、側向翻轉和豎直方向的旋轉;膝關節參考人類膝關節的前進方向轉動的特點,只設置一個旋轉自由度,可以實現小腿的俯仰運動。這樣雙足機器人一共有12個旋轉自由度[2]。
雙足機器人的運動是一個在三維空間內的立體運動,因此不能只簡單將雙足機器人看成是平面的單一方向的運動。但考慮到雙足機器人立體運動的復雜性,和廣義坐標法建模特點,在分析雙足機器人運動情況時可將其運動按照三個方向進行解耦,即分解為沿前進方向x軸運動的前向運動、沿著同前進方向垂直平面內y軸方向的往復擺動,以及沿著豎直方向 z軸的起落運動[3]。通過對整個運動的解耦,可以從三個方向更好的表現出運動的特點,便于進行分析和對比。
雙足步行機器人的運動學建模分為正運動學建模和逆運動學建模。正運動學建模的部分就是給定雙足機器人一個參考坐標系,通過機器人各剛體桿件之間的幾何關系和運動情況來確定雙足機器人的各關節相對于參考坐標系的位姿[4]。如圖 1所示為雙足機器人的前進方向建模。

圖1 雙足機器人前進方向運動模型Fig.1 The motion model of biped robot in forward direction
設定雙足機器人的支撐腳踝關節位置為參考坐標的原點,大腿和小腿各為長度為li,(i=1,2,3,4,5)的連桿,則可以在前進方向內得到以下各關節坐標:踝關節坐標(xl,zl)和(xr,zr),膝關節坐標(xkl,zkl)和(xkr,zkr),雙足機器人運動過程中假設其身體平面始終保持和前進方向垂直,則髖關節坐標為(xh,zh)。在前進方向運動平面內,踝關節和y軸方向夾角分別為θ1和θ5,髖關節處兩條大腿和y軸方向夾角分別為θ2和θ4,因不分析上半身雙臂和雙手的運動情況,則可以將上半身視為一個密度均勻的質量塊,也和下肢一樣等同為一個密度均勻的擺動剛體連桿,其和y軸方向的夾角為θ3。那么髖關節坐標和擺動腿踝關節坐標可以通過幾何關系,由以下的式子表示:
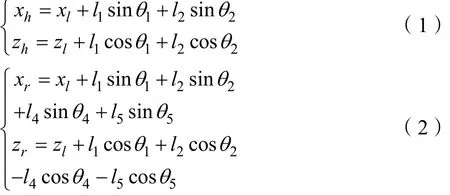
各關節在前進方向的運動速度可以通過對位置坐標的積分來求得,髖關節和擺動腿踝關節的速度可以表示為:
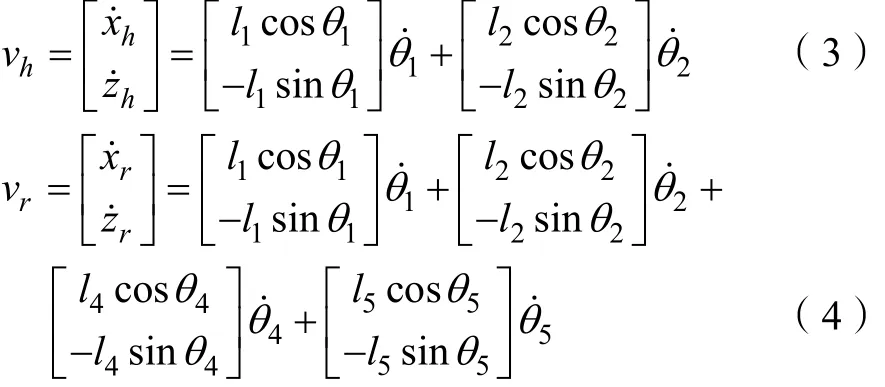
設每段連桿的質心處到各自連桿下端旋轉關節位置的長度為di,(i=1,2,3,4,5),則可以通過幾何關系得出各連桿的質心坐標:
通過對以上各式的求導進而可以求得各連桿質心的速度和加速度。
雙足機器人的逆運動學分析就是通過步態規劃得到機器人的髖關節和擺動腿踝關節與參考坐標之間的相應位姿,進而求取各關節相的實際運動情況。通過關節和連桿間的幾何關系,加上一些約束條件,限制關節的運動范圍,就可以求得期望解[5]。各關節的求解如下列方程所示:
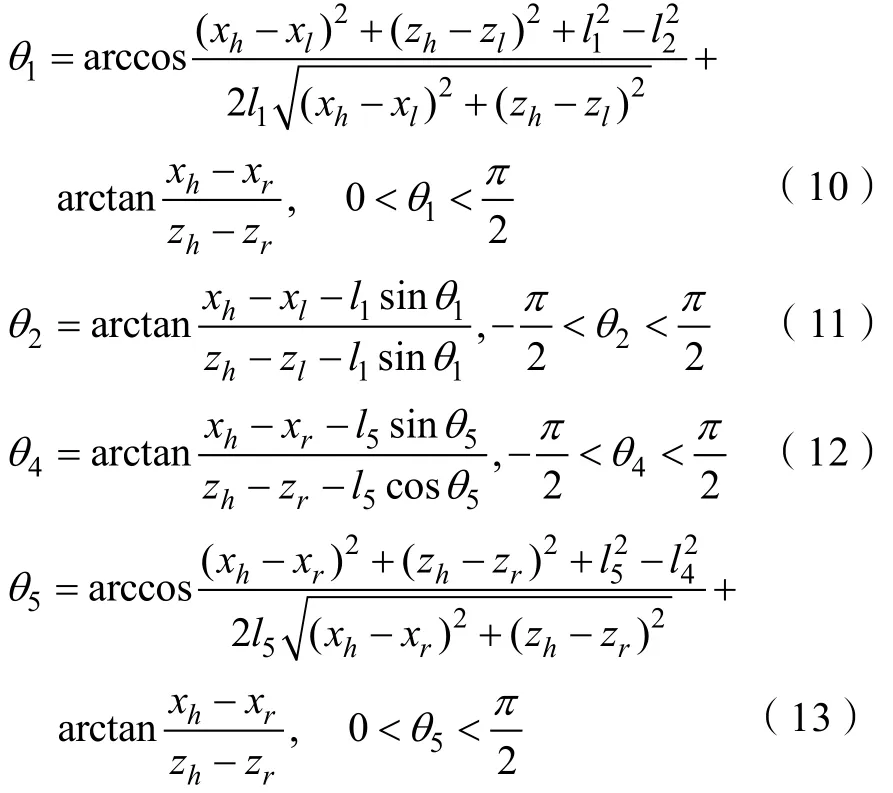
由于膝關節各只有一個前向運動的轉動自由度,只能實現小腿的俯仰,則雙足機器人在與前進方向相垂直平面內的運動,即側向運動的正、逆運動學分析就相對簡單一些。如圖2中所示的雙足機器人側向運動模型。
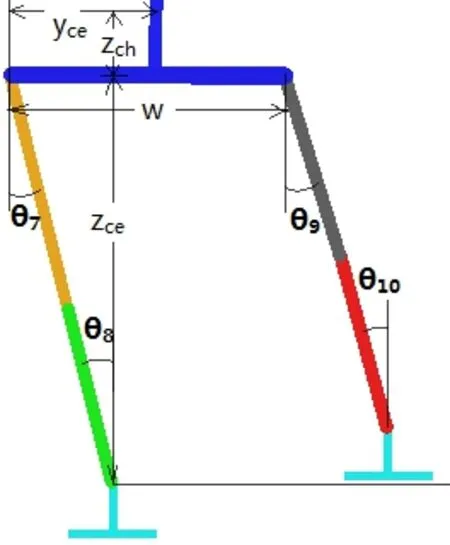
圖2 雙足機器人側向運動模型Fig.2 Lateral motion model of biped robot
側向運動建模時是從背離而去的方向為正視方向,以支撐腿踝關節為參考坐標原點。為了便于分析,假設在側向運動過程的投影中,兩條腿是保持平行的,那么兩條腿踝關節和髖關節的側向擺動角同 y軸方向的夾角均相等,則有 θ7=θ8=θ9=θ10,由雙足機器人側向運動的各桿件和關節的幾何關系可以得出:基于上述分析,雙足機器人的數學模型得以建立。

由此可以得出機器人的側向轉角為:

2 雙足機器人的穩定性判據
傳統的對運動物體的穩定性分析是通過判斷該物體的重心是否落在與地面接觸的平面范圍內,即靜止或勻速運動時,機器人的重心投影點Center of Gravity (COG)落在腳部與地面支撐面內,則機器人穩定。由于雙足機器人在運動過程中不可忽略速度的變化,即不可忽略加速度對步行姿態的影響[6],那么在進行穩定性分析的過程中應該將重力和慣性力考慮在內[7]。對于此問題,南斯拉夫科學家于上世紀 60年代提出了零力矩點 Zero Moment Point(ZMP)穩定性判據[8],即重力和慣性力的合力在地面上的投影,在這一點的合力矩為零的那一點,如圖3所示,若落在雙足與地面支撐面所構成的多邊形內,如圖4所示,則機器人行走穩定,也就滿足了雙足機器人的動態穩定性。
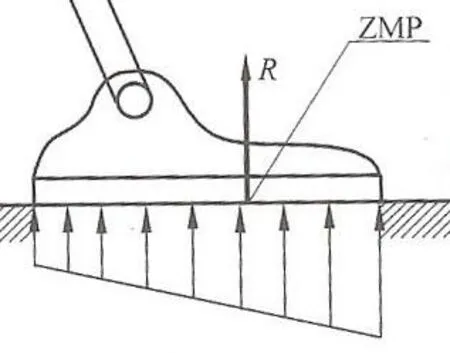
圖3 零力矩點判據示意圖Fig.3 Zero moment point stability criterion diagram
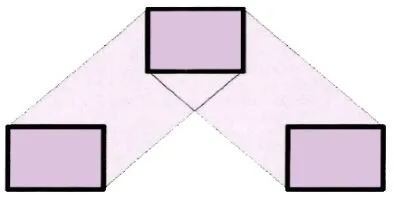
圖4 穩定運動時零力矩點的落點區域Fig.4 ZMP possible point of landing area in stable movement
在對機器人進行解耦分析過程中,可以得到零力矩點的坐標公式:
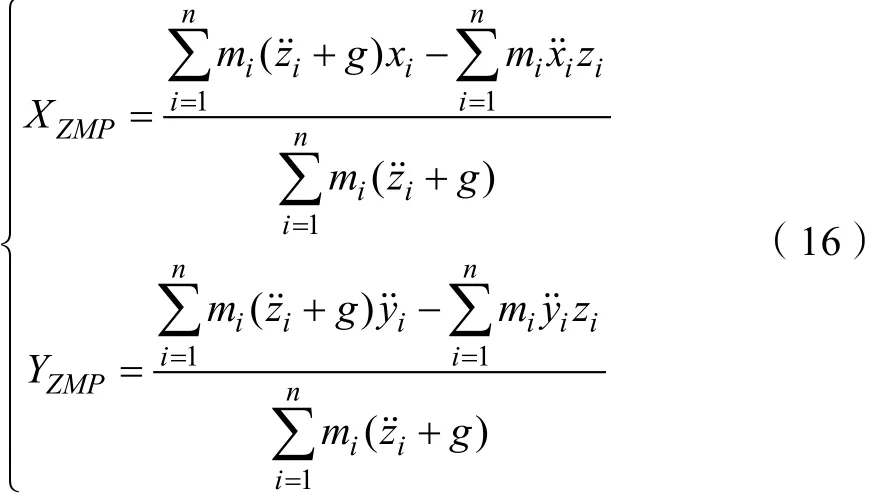
由于零力矩點最終要落到x,y平面內,則z方向的零力矩點為0。通過上面的公式可以求得ZMP點的坐標,并可以通過ZMP點和支撐區域的最短距離來判斷穩定裕度。
3 雙足機器人運動的步態規劃
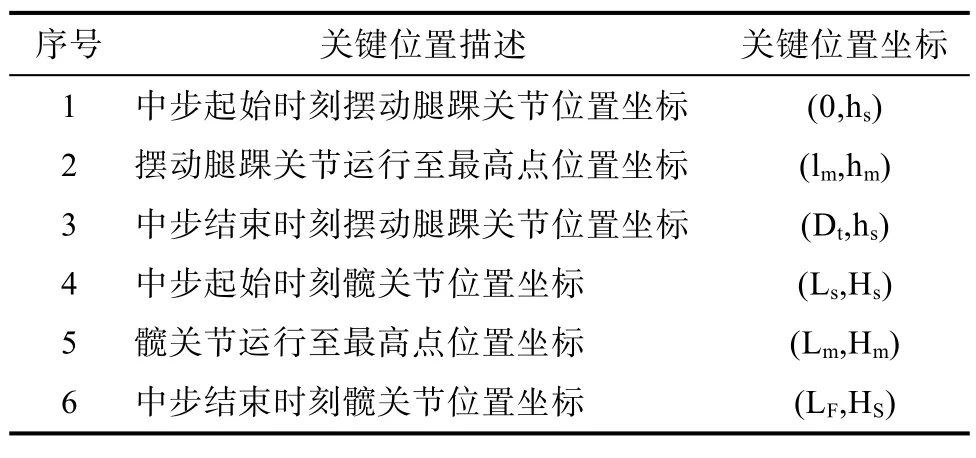
表1 踝關節和髖關節在步行中的關鍵位置列表Tab.1 Table of key locations for walking on ankles and hips
在運動過程中,設單步運動的距離為Dt,整個單步運動周期 Tw為單腳支撐期 Td與雙腳支撐期 Ts的和。由于機器人通過連桿和關節相連,只要確定踝關節和髖關節的軌跡,就可以確定其他關節的運動軌跡。
3.1 時序構造函數規劃法
時序構造函數法的步態規劃思路如圖5所示。
由于在步行過程中擺動腿和地面發生磕碰引起的振動容易對步行穩定性造成較大影響,在此假設擺動腳每次接觸和離開地面時速度為 0,加速度為0,并將此運用到髖關節的運動中[9]。首先構造出雙足機器人髖關節的加速度在x方向隨時間變化的軌跡函數:
步態是雙足機器人運動時各個關節在時序和空間上的一種協調關系,由各個關節運動的一組時間或空間軌跡來描述。起步階段時,由雙腳并立的無初始位移和速度的狀態,運動到具有平穩周期步行的中步階段,該運動階段是一個過渡階段;中步階段是雙腳往返交替運動,具有周期性運動特點的階段;止步階段是由中步降低速度直至雙腳平穩站立,和起步階段剛好相反。觀察步行狀態,起步和止步階段是中步階段的特例,運動幅度較小,而中步運動階段具有周期性和代表性,僅需分析中步運動階段中的單步運動,也就是從擺動腳離地開始到擺動腳再次離地為止的過程,反映為單腳支撐期間的步行姿態。步行運動的代表性位置如表1所示,其位置可以作為后續步態規劃的關鍵位置。通過對上式積分以及初始時刻的加速度為0的條件可以得到髖關節速度隨時間變化函數:
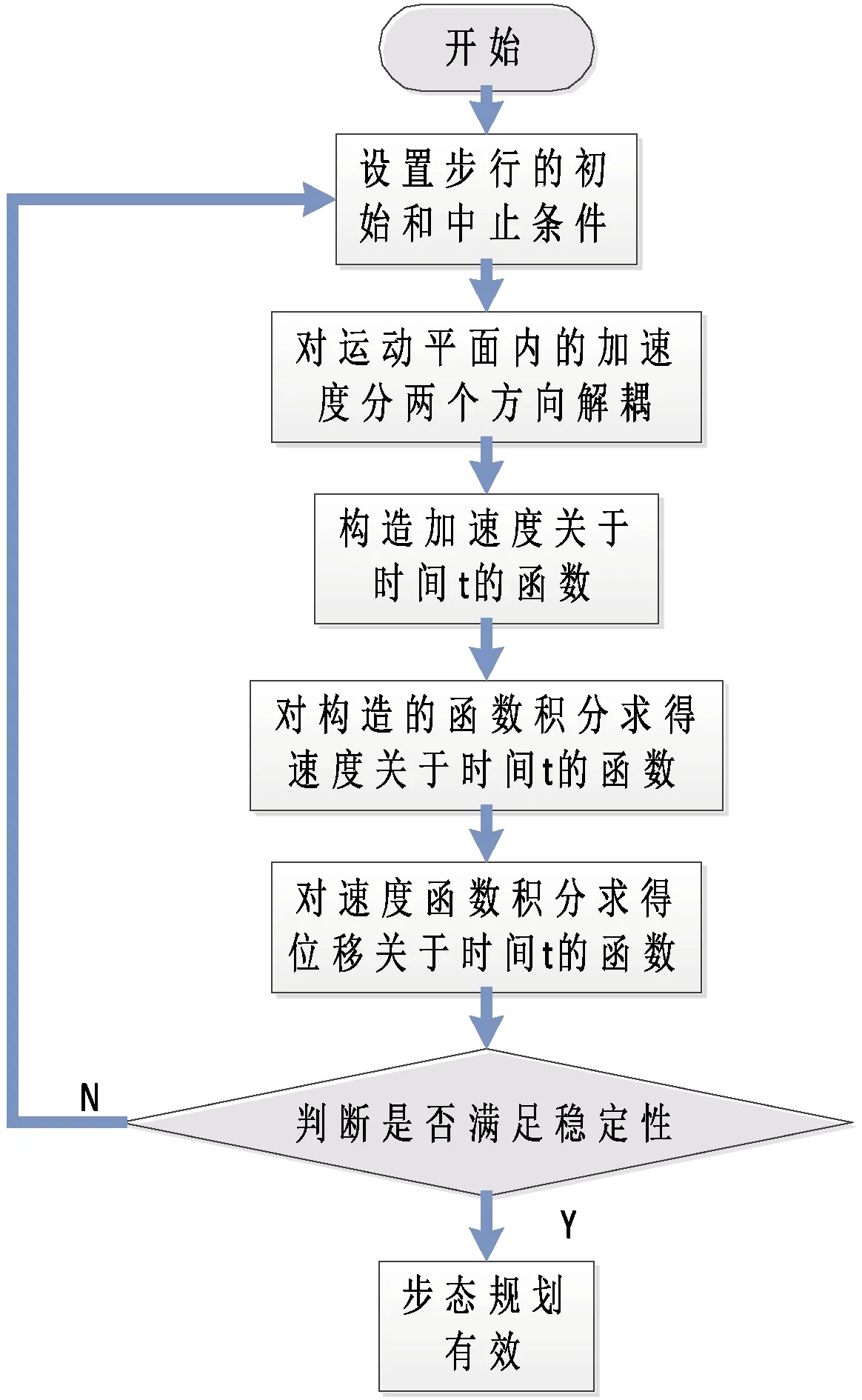
圖5 時序構造函數法步態規劃流程圖Fig.5 Flow chart of gait planning of sequential constructor method

通過對上式積分以及初始時刻的加速度為0的條件可以得到髖關節速度隨時間變化函數:

通過對上式積分以及初始時刻的速度為0的條件可以得到髖關節位移隨時間變化函數:

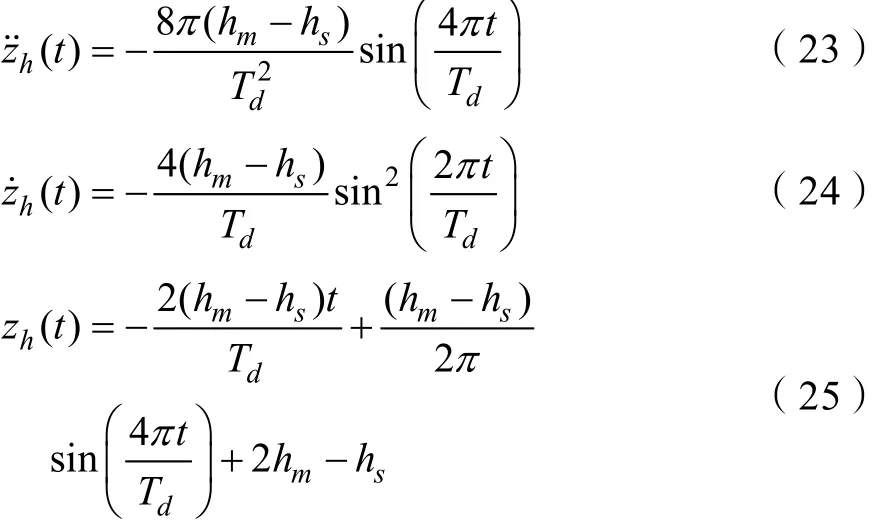
由于在z方向的運動是先抬起后落下的運動,則整個步態規劃分為(0,Td/2)和(Td/2,Td)兩個時段,初始條件依然適用,在(0,Td/2)時段構造出雙曲機器人髖關節在上升時的加速度在 z方向的隨時間變化的軌跡函數:

通過對上式積分以及初始時刻的速度為0的條件可以得到髖關節位移隨時間變化函數:


同樣的方法,在(Td/2,Td)時段通過構造和積分得出下落時的速度、加速度、位移在 z方向隨時間變化的軌跡函數:
由雙足步行時關節運動時序的一致性,擺動腿踝關節在運動過程中也遵循初始和中止速度和加速度為0的情況,那么根據上述方法可以構造出擺動腿踝關節運動隨時間的軌跡。
3.2 三次樣條插值規劃法
三次樣條插值方法在進行步態規劃時,通過用擺動腿髖關節的x和z方向的相對位置來表示運動狀態,進而繼續確定機器人各部分相對運動的關系[10]。三次樣條插值法設計思路如圖6所示。
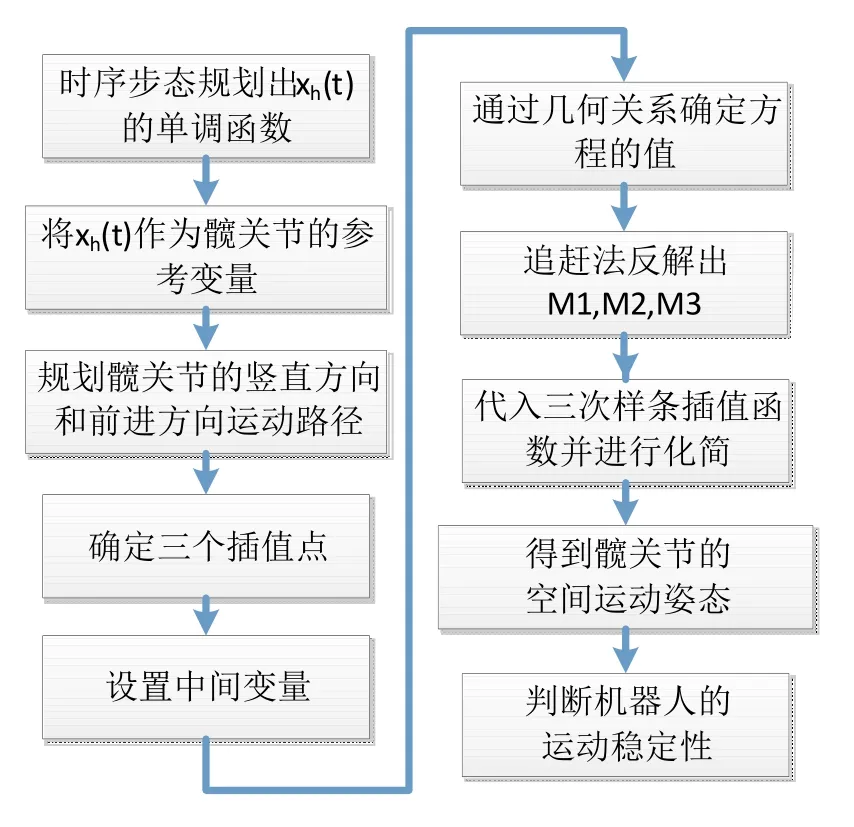
圖6 三次樣條插值法步態規劃流程圖Fig.6 Flow chart of gait planning of Cubic spline interpolation
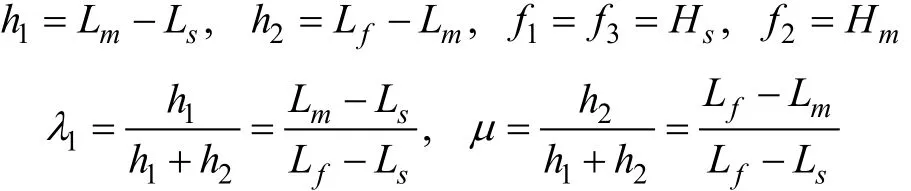
在三次多項式中三個插值點的選取上,由運動的對稱性,和位移曲線連續且光滑的特點,選擇髖關節的起始位置、最高位置和中止位置,設定關系如下:
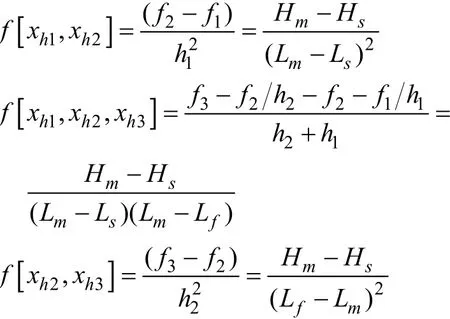
由三次樣條插值函數的連續性以及其導數的連續性[12],可得到如下方程:
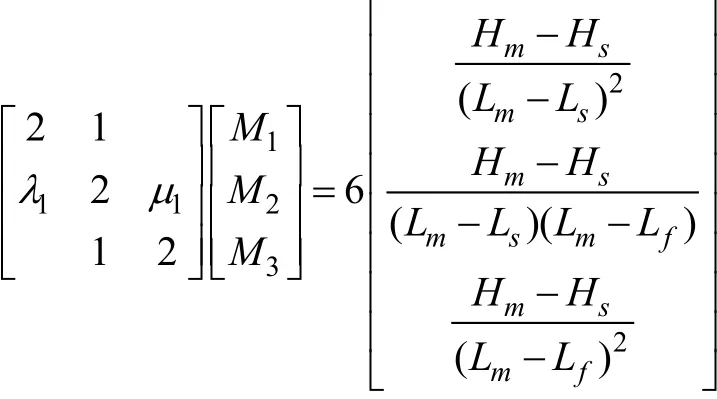
通過追趕法[11]求出 M1,M2,M3的值并代入三次樣條函數中,可以得到髖關節的x和z方向的關系表達式:
通過對上式的求導,可以得出髖關節的高度變化率相對于位移的情況。并且可以通過類似的步驟,求得踝關節的x方向、z方向的位移、速度和速度變化率同髖關節x方向位置的情況。
4 仿真結果
通過第2節建立的數學模型和第3節設定的兩種步態規劃方法,按照身高185cm的人體特征,和一定的比例,選取腿長、腿部質量等適當的參數進行仿真。參數選取如表2所示。利用時序構造函數法規劃步態,在matlab上進行編程仿真,在單腳支撐期間,髖關節前進方向的仿真結果如圖7、圖8、圖9所示。

表2 雙足機器人各部分參數取值表Tab.2 Table of parameters in each part of the biped robot
時序構造函數法可以較為清晰地表現出髖關節沿行進方向和豎直方向的位移、速度、加速度隨時間變化的特征。以上三幅圖的(a)部分均為行進方向,即x方向隨時間的變化情況;(b)部分均為豎直方向,即 z方向隨時間的變化情況。經過對比不難發現,時序構造方法對各關節進行步態規劃時,可以保證位移、速度、加速度隨時間變化的函數是連續的,且滿足初始條件要求,即擺動腳離地和觸地瞬間,速度和加速度均為0。
時序構造函數法還可以較為清晰地表現出各關節角度隨時間變化的情況。圖10所示就是以踝關節和髖關節為例,單腳支撐期間,關節角速度、角加速度隨時間的變化曲線。可以發現,角速度和角加速度曲線均連續,但在最高位置交替時,因為步態規劃中抬腳和落腳的相反對稱特性,整體走勢出現較大變化。
三次樣條插值法所表現出的仿真結果更具有空間性,如圖11(a)所示為單腳支撐期間三次樣條插值法規劃下的髖關節z方向位移隨x方向位移變化曲線,可以較為清晰地反映出雙足機器人在空間內的運行姿態,相比較時序構造函數法,更能體現真實的運動軌跡。圖11(b)和圖12分別為髖關節z方向隨x方向位移變化曲線的一階導數和二階導數,可以看出三次樣條插值法規劃的步態具有很高的對稱性,且在二階導數圖像中可以明顯發現其線性特征。如果需要將時序構造函數法改變成為能反映空間運動姿態的方式,需要首先用時間 t來反映位移、速度及加速度。但是由于x方向運動表達式屬于超越方程,無法得到反函數,所以基于求得反函數帶入到 z向關于時間 t表達式的方法就無法進行,那么在空間運行姿態方面,也就無法利用對時序構造函數法進行改造而與三次樣條插值法對比。
但通過對zmp公式進行改造成空間表達式,再轉換到利用時間 t表示的方式,可以進行兩種步態規劃效果的對比。圖13能夠清晰反應雙足機器人的步態規劃穩定性特點,經過對比發現,兩種方法計算出來的ZMP軌跡都始終徘徊在重心附近,且利用三次樣條插值法的 ZMP軌跡幅度比時序構造函數法的幅度更小,則穩定裕度相對較大,穩定性能更好。
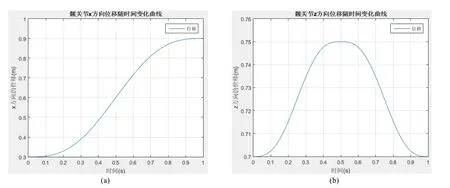
圖7 髖關節x、z方向位移隨時間變化曲線Fig.7 Displacement curves over time of jip joint in x and z direction
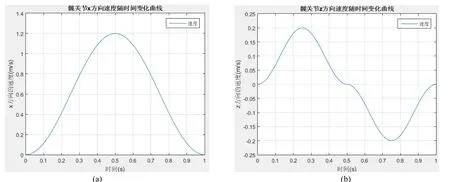
圖8 髖關節x、z方向速度隨時間變化曲線Fig.8 Speed curves over time of hip joint in x and z direction
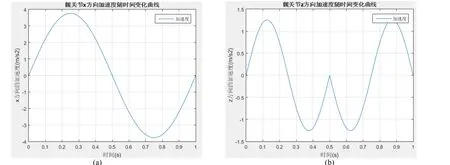
圖9 髖關節x、z方向加速度隨時間變化曲線Fig.9 Acceleration curves over time of hip joint in x and z direction
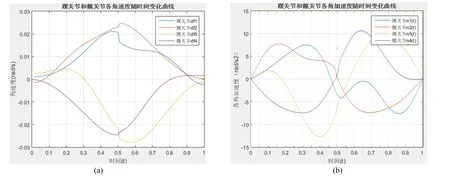
圖10 踝關節和髖關節各角速度、加速度隨時間變化曲線Fig.10 Angular velocity and Angular acceleration curves over time of hip joint and ankle joint
5 結論
本文通過運用兩種不同的方法對雙足機器人運動進行了規劃,從時序構造函數法上能夠表現出運動狀態隨時間的變化;從三次樣條插值法上能夠表現出豎直方向隨著前進方向移動的空間姿態。兩者反映出了步態規劃的不同特點,但從穩定性的對比上,在相同的參數取值情況下三次樣條插值法規劃的步態運動穩定性較好,且三次樣條插值方法步態規劃的結果更能反映出關節角在空間運動的軌跡。但是解耦規劃帶有一定局限性,在matlab仿真中雖能觀察位移、速度、加速度隨時間的軌跡或空間的運行姿態,但并不能夠很好的反映出運動合成的效果。而解耦規劃后的整合運動也是雙足機器人仿真運動需要后續研究的側重點。

圖11 樣條插值法z方向位移、x方向位移及一階導數曲線Fig.11 The cubic spline interpolation z-direction displacement, x-direction displacement and the first derivative curve
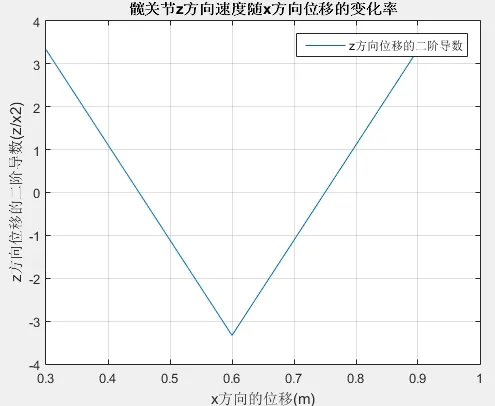
圖12 三次樣條插值法z方向位移和x方向位移二階導數曲線Fig.12 The cubic spline interpolation z-direction displacement and x-direction displacement second derivative curve
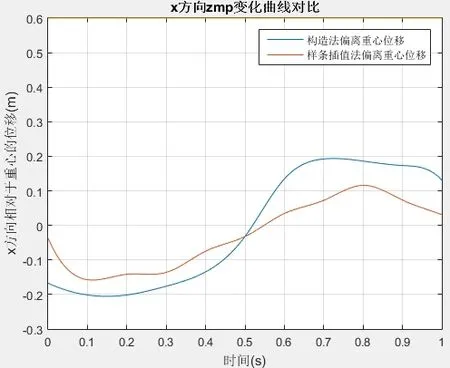
圖13 兩種方法ZMP對比曲線Fig.13 ZMP comparison curves for both methods
[1] 田彥濤, 孫中波, 李宏揚. 動態雙足機器人的控制與優化研究進展[J]. 自動化學報2016. 8(8): 1142-1157.
[2] 康少陳. 基于ADAMS的雙足機器人步態規劃及仿真研究[D]. 哈爾濱: 哈爾濱理工大學, 2012. 3.
[3] Qiang Huang, Kazuhito Yokoi, Shuuji Kajita, ec al. Planning Walking Patterns for a Biped Robot[J]. IEEE Transactions on robotics and automation, Vol.17, No.3, 2001. 3.
[4] 賀凱, 李韶杰, 古亞威, 等. 移動機器人新型半智能路徑導航系統的設計與實現[J]. 軟件, 2013, 34(04): 1-6.
[5] 年士瑞. 雙足人形機器人多目標步態規劃的研究[D]. 合肥: 合肥工業大學 2011. 4.
[6] 吳俊. 六自由度雙臂機器人動力學分析與運動控制[J]. 軟件, 2017, 38(03): 128-132.
[7] 包志軍,馬培蓀,仝建剛. 人行走速度規律的實驗研究[J].實驗室研究與探索 2000, (6): 39-42.
[8] Fujita M, Kuroki Y, Ishida T, et al. Autonomous behavior control architecture ofentertainment humanoid robot SDR-4X[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems. 2003. 960-967.
[9] 鄧欣. 雙足機器人步行穩定性研究[D]. 哈爾濱: 哈爾濱工程大學 2007. 2.
[10] 楊東超,汪勁松.基于ZMP的擬人機器人的步態規劃[J].機械工程師 2001.11 23(6):50-55
[11] 于洋, 袁建華, 錢江, 等. 新邊界條件下的三次樣條插值函數[J]. 軟件, 2016, 37(02): 25-28.
[12] 鐘興志, 王晨升, 劉豐, 等. 步態識別綜述[J]. 軟件, 2013,34(04): 160-164.
Decoupling Analysis and Comparison of Two Gait Planning for Biped Robot
REN Jie, XU Jiang-chun, YUE Qiu-yan, YU Li-ling
(Kunming University of Science and Technology, Faculty of Information Engineering and Automation, Kunming 650500, China)
In the research of biped robot gait planning, firstly, the forward direction and lateral swing are decoupled, and then the mathematical model of kinematics is established. The ZMP stability criterion is used to judge the walking stability of biped robot. Gait planning of biped robot is carried out by using the sequential constructing method and the cubic spline interpolation method. Using MATLAB programming and simulation, by which can reflect the different characteristics of the walking state in time or space under different planning methods. The simulation results show that the gait planning of the cubic spline interpolation method can better reflect the walking stability of biped robot.
Biped robot; Sequential constructing; Cubic spline interpolation; Gait planning
TP242
A
10.3969/j.issn.1003-6970.2017.12.003
本文著錄格式:任杰,許江淳,岳秋燕,等. 雙足機器人的兩種步態規劃的解耦分析及比較[J]. 軟件,2017,38(12):10-17
國家自然科學基金項目資助(61363043)
任杰(1989-),男,碩士研究生,主要研究方向:嵌入式技術及應用,雙足機器人步態優化。
許江淳(1962-),男,副教授,主要研究方向:嵌入式技術及應用。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41