約束陀螺柔性體執(zhí)行機構(gòu)優(yōu)化配置和主動振動控制
2018-01-04 02:57:41賈世元賈英宏徐世杰侯月陽王奉文
宇航學(xué)報 2017年12期
賈世元,賈英宏,徐世杰,盧 山,侯月陽,王奉文
(1. 北京航空航天大學(xué)宇航學(xué)院,北京 100191;2. 上海航天控制技術(shù)研究所上海市空間智能控制技術(shù)重點實驗室,上海 201109)
約束陀螺柔性體執(zhí)行機構(gòu)優(yōu)化配置和主動振動控制
賈世元1,賈英宏1,徐世杰1,盧 山2,侯月陽2,王奉文2
(1. 北京航空航天大學(xué)宇航學(xué)院,北京 100191;2. 上海航天控制技術(shù)研究所上海市空間智能控制技術(shù)重點實驗室,上海 201109)
研究了約束陀螺柔性體上執(zhí)行機構(gòu)的優(yōu)化配置和主動振動控制,通過對帶有變速控制力矩陀螺的單陀螺柔性體的模型簡化,得到了線性化的約束陀螺柔性體的動力學(xué)模型。提出一種約束陀螺柔性體執(zhí)行機構(gòu)優(yōu)化配置的新方法,該方法直接基于振動響應(yīng)和振動能量對陀螺執(zhí)行機構(gòu)進行配置。優(yōu)化配置的目標(biāo)函數(shù)為線性二次型最優(yōu)控制的最優(yōu)值。將優(yōu)化配置問題轉(zhuǎn)化為整數(shù)組合優(yōu)化問題,使用遺傳算法(GAs)求解給定數(shù)目執(zhí)行機構(gòu)優(yōu)化配置的組合問題。研究了執(zhí)行機構(gòu)在不同安裝方向下的優(yōu)化配置情況,優(yōu)化配置的構(gòu)型用于陀螺柔性體的主動振動控制。數(shù)值仿真校驗了優(yōu)化配置方法及結(jié)果的可行性和有效性。
約束陀螺柔性體;優(yōu)化配置;遺傳算法;振動抑制
0 引 言
隨著空間任務(wù)的日益復(fù)雜,航天器的結(jié)構(gòu)也日趨復(fù)雜,其中大型化、低密度和柔性化成為航天結(jié)構(gòu)的一個重要發(fā)展趨勢,為了降低發(fā)射成本和太空作業(yè)的需要,大型空間結(jié)構(gòu),如大型太陽帆板,大型天線和空間柔性機械臂等常常采用輕質(zhì)材料制造。大型柔性結(jié)構(gòu)通常具有大的撓性和較小的自身阻尼,而太空環(huán)境中幾乎無外界阻尼。當(dāng)大型復(fù)雜航天器在實現(xiàn)快速機動或受到外界干擾時,柔性結(jié)構(gòu)會產(chǎn)生振動,振動將會嚴重影響元器件的工作,導(dǎo)致性能下降而失效[1];另外,長期的振動也會引起結(jié)構(gòu)的疲勞破壞。因此,以剛體為假設(shè)前提的被動振動控制不再適用于柔性復(fù)雜航天器的控制。
針對柔性航天器的振動抑制問題,許多學(xué)者采用不同的控制方法降低柔性結(jié)構(gòu)的振動抑制[2-4]。為了實現(xiàn)大型空間柔性結(jié)構(gòu)的主動振動抑制,大量文獻討論了在空間柔性結(jié)構(gòu)上粘貼智能結(jié)構(gòu),如文獻[5]基于歐拉-伯努利梁的有限元模型使用不同的控制策略研究了梁結(jié)構(gòu)的主動振動控制。Ning[6]優(yōu)化了壓電片的數(shù)目和位置用來實現(xiàn)柔性結(jié)構(gòu)的主動振動抑制。邱志成[7]針對撓性板結(jié)構(gòu)的振動控制問題,給出了一種壓電敏感器和驅(qū)動器同位配置的優(yōu)化方法。Kim等[8]和Kumar等[9]討論了柔性板上壓電執(zhí)行機構(gòu)的分布問題。林西強等[10]將壓電片用于層合板的振動控制。利用壓電材料做成的執(zhí)行機構(gòu)/傳感器能夠適用于一般柔性結(jié)構(gòu)的振動抑制,但是壓電材料作為執(zhí)行機構(gòu)在大型空間柔性結(jié)構(gòu)中的應(yīng)用存在一定的問題,其最大缺點是壓電執(zhí)行機構(gòu)提供的驅(qū)動力小。為了提供大型結(jié)構(gòu)主動振動控制所需要的驅(qū)動能量,不得不增加執(zhí)行機構(gòu)的數(shù)目。執(zhí)行機構(gòu)的增加會給控制器的設(shè)計帶來難度,而且計算量也會增加,這會對控制的實時性產(chǎn)生影響。
繼而,D’Eleuterio 和 Hughes提出了陀螺柔性體理論[11-13],陀螺柔性體是指具有連續(xù)儲存角動量的柔性體,角動量裝置可以直接產(chǎn)生控制力矩用于柔性結(jié)構(gòu)的振動抑制。Damaren和D’Eleuterio[14-15]又進一步討論了陀螺柔性體的能觀性和能控性,他們認為能觀性和能控性可以實現(xiàn)角動量的配置。但是在實際應(yīng)用中不可能實現(xiàn)連續(xù)配置的角動量裝置,角動量裝置的配置必定是離散的,逐點配置的。因此,將配置有離散角動量裝置的柔性體定義為陀螺柔性體。Aubrun 等[16]提出了陀螺阻尼器的概念,該阻尼器包含一個單框架控制力矩陀螺和一個角速度傳感器。Shi等[17]也研究了類似的陀螺阻尼器用來實現(xiàn)懸臂梁的主動振動抑制。要實現(xiàn)角動量裝置對柔性體的主動振動抑制,需要考慮角動量執(zhí)行機構(gòu)的優(yōu)化配置,也就是將執(zhí)行機構(gòu)配置在柔性結(jié)構(gòu)的什么位置能夠具有較好的振動抑制效果。
陀螺執(zhí)行機構(gòu)優(yōu)化配置的相關(guān)研究還比較少,Hu等[18]基于能觀性和能控性指標(biāo)對執(zhí)行機構(gòu)在柔性結(jié)構(gòu)上的配置進行了討論,但是通過該指標(biāo)進行配置得到的構(gòu)型在振動抑制中并不一定具有好的效果。另外,他們的研究只是針對單個執(zhí)行機構(gòu)在不同位置上的配置,沒有討論多個執(zhí)行機構(gòu)如何配置的問題。Chee和Damaren[19]研究了控制力矩陀螺在大型柔性結(jié)構(gòu)上的分布,但是他們的研究主要在于控制力矩陀螺角動量的分布,而不是控制力矩陀螺位置的優(yōu)化。Jia等[20]基于能觀能控性指標(biāo)研究了不同數(shù)目陀螺柔性體執(zhí)行機構(gòu)的優(yōu)化配置問題,但是他們的研究中沒有考慮執(zhí)行機構(gòu)安裝方向的優(yōu)化問題。本文研究了陀螺執(zhí)行機構(gòu)在柔性板上的配置問題,不同于以往的能觀能控性指標(biāo),本文提出了基于線性二次型指標(biāo)的陀螺執(zhí)行機構(gòu)優(yōu)化配置方法,并將多個離散執(zhí)行機構(gòu)的配置問題轉(zhuǎn)化為整數(shù)優(yōu)化問題,利用遺傳算法求解優(yōu)化配置問題。并對執(zhí)行機構(gòu)在不同安裝方向下的優(yōu)化配置問題進行了討論。數(shù)值仿真表明,通過線性二次型指標(biāo)得到的優(yōu)化配置構(gòu)型能夠較好地抑制柔性結(jié)構(gòu)的振動。
1 約束陀螺柔性體的控制
1.1 約束陀螺柔性體的狀態(tài)空間方程
文獻[21]推導(dǎo)了具有離散變速控制力矩陀螺的單陀螺柔性體的動力學(xué)方程,文獻[18]將該動力學(xué)方程化簡為帶有離散控制力矩陀螺的約束陀螺柔性體的動力學(xué)方程。該研究以約束陀螺柔性板為基本構(gòu)型,如圖1所示。約束柔性板上具有n個控制力矩陀螺,在板的約束端建立其體坐標(biāo)系Fb,每個控制力矩陀螺固定一個框架坐標(biāo)系,框架坐標(biāo)系的中心在其質(zhì)心上,并假設(shè)陀螺框架質(zhì)心和轉(zhuǎn)子的質(zhì)心與整個陀螺的質(zhì)心重合,第i個控制力矩陀螺的質(zhì)心用Qgi表示。
圖1(b)給出了第i個控制力矩陀螺的框架坐標(biāo)系,其中xgi為單位向量沿框架速度方向;ygi為單位向量沿轉(zhuǎn)子自旋軸方向;zgi通過右手法則確定。每個控制力矩陀螺具有給定的初始安裝方向。假設(shè)在初始安裝方向下,框架坐標(biāo)系用Fgi0來表示,其組成向量為xgi0,ygi0和zgi0,其中xgi0與向量xgi的方向相同,ygi0為框架軸零初始條件下的轉(zhuǎn)子自旋軸方向,zgi0=xgi0×ygi0。
忽略高階小量并設(shè)約束板本體的速度和角速度為零,約束陀螺柔性板的動力學(xué)方程可以通過文獻[21]中的式(7)得到
(1)

(2)


(3)
則約束陀螺柔性板的動力學(xué)方程可以簡化為:
(4)
其中,
(5)


(6)
(7)
將該方程寫成狀態(tài)方程的形式
(8)
系統(tǒng)輸出為柔性板的彈性位移
Y=CX
(9)
1.2 最優(yōu)控制問題
基于狀態(tài)空間模型,線性二次型最優(yōu)控制可以應(yīng)用到該系統(tǒng)中。對于給定的約束陀螺柔性體,線性二次型最優(yōu)控制的性能指標(biāo)如下:

(10)
式中:R和Q分別為正定對稱陣和半正定對稱陣。較大的Q值表明需要控制具有更大的振動抑制能力,式(10)中的第二項解釋了控制系統(tǒng)的控制能力。系統(tǒng)最優(yōu)控制律如下:
u=-PcX
(11)
其中,Pc=R-1BTS為控制增益,S為如下代數(shù)黎卡提方程的解
ATS+SA-SBR-1BTS+CTQC=0
(12)
2 優(yōu)化配置問題
本文研究的目的是實現(xiàn)控制力矩陀螺執(zhí)行機構(gòu)的優(yōu)化配置,并對約束陀螺柔性板進行振動抑制控制。目標(biāo)函數(shù)選為式(10)中線性二次型最優(yōu)控制的最優(yōu)值,該最優(yōu)值可以表示成如下形式:
(13)


(14)

Jopt(x)=tr[S(x)]
(15)
目標(biāo)函數(shù)的值表示了振動抑制快慢和控制量的權(quán)重之和。
執(zhí)行機構(gòu)的優(yōu)化配置屬于組合問題,遺傳算法在求解組合問題中具有廣泛的應(yīng)用[22],因此本文運用遺傳算法對控制力矩陀螺執(zhí)行機構(gòu)進行優(yōu)化配置。配置目標(biāo)是確定n執(zhí)行機構(gòu)的位置使得目標(biāo)函數(shù)值Jopt(xi)最小,優(yōu)化配置是在線性二次型的基礎(chǔ)上實現(xiàn)的。將離散的執(zhí)行機構(gòu)優(yōu)化配置問題轉(zhuǎn)化為整數(shù)優(yōu)化的問題,使用遺傳算法求解整數(shù)優(yōu)化問題。遺傳算法是隨機搜索算法,該算法借鑒了進化生物學(xué)中的一些現(xiàn)象而發(fā)展起來的,這些現(xiàn)象包括遺傳、突變、自然選擇以及雜交等。遺傳算法通常情況下選用二進制字符串對變量進行編碼,編碼后的字符串對應(yīng)于生物進化中的染色體,每個變量即為染色體上的一個基因。在進化過程中整數(shù)編碼比二進制編碼具有更快的進化速度,因此本文采用整數(shù)編碼對執(zhí)行機構(gòu)進行優(yōu)化配置。將執(zhí)行機構(gòu)的位置編碼成一個整數(shù)字符串,字符串上第i個基因表示第i個執(zhí)行機構(gòu)的位置。個體的評價是通過適應(yīng)度函數(shù)實現(xiàn)的,適應(yīng)度函數(shù)對應(yīng)于優(yōu)化配置中的目標(biāo)函數(shù),種群的重組也是根據(jù)適應(yīng)度函數(shù)進行的。新的代數(shù)是通過父代的選擇交叉變異得到的。盡管遺傳算法是隨機搜索算法,但是遺傳算法能夠根據(jù)現(xiàn)有的知識探索得到具有好的適應(yīng)度的新一代個體。遺傳算法的進化流程如圖2所示。
在應(yīng)用遺傳算法對執(zhí)行機構(gòu)做優(yōu)化配置時需要對遺傳算法做如下修正:
1)遺傳算法的初始種群是隨機產(chǎn)生的,當(dāng)所有的執(zhí)行機構(gòu)都具有相同的初始安裝方向時,染色體的長度與約束板上執(zhí)行機構(gòu)的數(shù)目相同。當(dāng)執(zhí)行機構(gòu)具有不同的初始安裝方向時,染色體的長度是執(zhí)行機構(gòu)數(shù)目的兩倍,其中前n個基因表示n個執(zhí)行機構(gòu)的安裝位置,后n個基因表示執(zhí)行機構(gòu)的初始安裝方向。
2)對于所有執(zhí)行機構(gòu)具有相同初始安裝方向的情況,染色體上每個基因的邊界為[1,nnode],其中nnode為柔性板上有限元節(jié)點的數(shù)目。對于執(zhí)行機構(gòu)具有不同初始安裝方向的情況,染色體前n個基因的邊界設(shè)為[1,nnode],后n個基因的邊界設(shè)為[0, 1],其中0表示陀螺的初始安裝方向與式(3)中的方向相同,即陀螺框架軸初始方向xgi0沿柔性板本體坐標(biāo)系xb的負方向,陀螺轉(zhuǎn)子初始自旋方向ygi0沿柔性板本體坐標(biāo)系zb的正向,zgi0沿柔性板本體坐標(biāo)系yb的正向。1表示陀螺的初始安裝方向與式(6)中的方向相同,即陀螺框架軸初始方向xgi0沿柔性板本體坐標(biāo)系yb的正向,陀螺轉(zhuǎn)子初始自旋方向ygi0沿柔性板本體坐標(biāo)系zb的正向,zgi0沿柔性板本體坐標(biāo)系xb的正向。
3)為避免執(zhí)行機構(gòu)在相同位置的重復(fù)配置,需要在遺傳算法中添加約束,當(dāng)某個染色體的前n個基因中有任意兩個基因的值相同,則該染色體表示的個體無效,需要重新生成個體,直到每個個體均為有效個體后再對種群進行下一代的進化。
3 結(jié)果和討論
本部分給出了約束陀螺柔性板執(zhí)行機構(gòu)優(yōu)化配置的結(jié)果及討論。將約束板離散成20×12個板元素,板的有限元中共包含273個節(jié)點,從固定端的一個角上開始對節(jié)點進行編號,將該節(jié)點編號為1。固定端上共有13個節(jié)點,分別為[1, 22, 43, 64, 85, 106, 127, 148, 169, 190, 211, 232, 253],其余節(jié)點按照從固定端到自由端逐漸增大的原則進行編號。執(zhí)行機構(gòu)的位置通過板的節(jié)點來表示,所有的節(jié)點均為執(zhí)行機構(gòu)和候選位置。執(zhí)行機構(gòu)的數(shù)目假設(shè)為固定值6,所有的陀螺轉(zhuǎn)子假設(shè)均具有相同的角動量hi=2 Nm/s,角動量的初始方向均沿zb軸如圖3所示,板和陀螺的質(zhì)量特性和幾何數(shù)據(jù)如表1所示,為了更好地觀察執(zhí)行機構(gòu)對柔性板的主動振動抑制效果,優(yōu)化配置及控制中忽略板的自身阻尼。選擇柔性板的前六階模態(tài)(如圖4所示)對執(zhí)行機構(gòu)進行優(yōu)化配置,約束柔性板的前六階頻率分別為0.03583505 Hz, 0.1308988 Hz, 0.2223560 Hz, 0.4341273 Hz, 0.6114872 Hz和0.6870883 Hz。
本文討論了三種不同案例的執(zhí)行機構(gòu)初始安裝方向。“案例1”表示所有的執(zhí)行機構(gòu)的初始安裝方向均與式(3)中的方向相同,“案例2”表示所有執(zhí)行機構(gòu)的初始安裝方向均與式(6)中的方向相同,“案例3”表示執(zhí)行機構(gòu)的初始安裝方向可以為混合安裝方式,即每個執(zhí)行機構(gòu)的初始安裝方向既可以與式(3)中的方向相同也可以與式(6)中的方向相同。
遺傳算法用于6個執(zhí)行機構(gòu)優(yōu)化配置時參數(shù)設(shè)置如下:種群數(shù)目為100;交叉概率為0.85;變異概率為0.02;最大進化代數(shù)為5000。不同案例下的遺傳算法收斂特性如圖5所示。從圖5可以看出,案例2中的目標(biāo)函數(shù)最小值比案例1和案例3中的目標(biāo)函數(shù)最小值要大,案例3具有最小的適應(yīng)度函數(shù)值。案例1中執(zhí)行機構(gòu)的優(yōu)化配置位置為[18, 11, 263, 271, 270, 19];案例2中執(zhí)行機構(gòu)優(yōu)化配置位置為[7, 8, 259, 260, 13, 265];案例3中執(zhí)行機構(gòu)優(yōu)化配置的位置和方向為[18, 19, 271, 20, 272, 270, 0, 0, 0, 1, 1, 0],通過方向參數(shù)可以看出安裝在節(jié)點18,19,271和270上的執(zhí)行機構(gòu)初始安裝方向與式(3)中的方向相同,而安裝在節(jié)點20和272上的執(zhí)行機構(gòu)初始安裝方向與式(6)中的方向相同。優(yōu)化結(jié)果表明,執(zhí)行機構(gòu)主要配置在板的兩側(cè)和角上,主要是由于這些位置具有較大的模態(tài)斜率,執(zhí)行機構(gòu)在優(yōu)化位置上的配置能夠更好地抑制約束陀螺柔性板的振動。
根據(jù)執(zhí)行機構(gòu)優(yōu)化配置的結(jié)果,討論陀螺執(zhí)行機構(gòu)對柔性板的振動抑制情況。模態(tài)坐標(biāo)初值設(shè)為[0.5, -0.4, -0.2, -0.2, 0.1, -0.1],線性二次型權(quán)重因子為Q=1,R=1,不同案例下的前六階模態(tài)坐標(biāo)的響應(yīng)如圖6~8所示。從圖6~8可以看出,案例1和案例3對模態(tài)的振動抑制效果較案例2好,案例1和案例3相比,其二階模態(tài)的收斂速度比案例3中的模態(tài)收斂速度慢,會影響整個柔性板的振動抑制效果,從總體效果來看,案例3的各階模態(tài)都能夠以相對較快的速度收斂,這表明陀螺執(zhí)行機構(gòu)混合安裝方式對柔性板的振動抑制效果比單一方向的安裝方式要好。
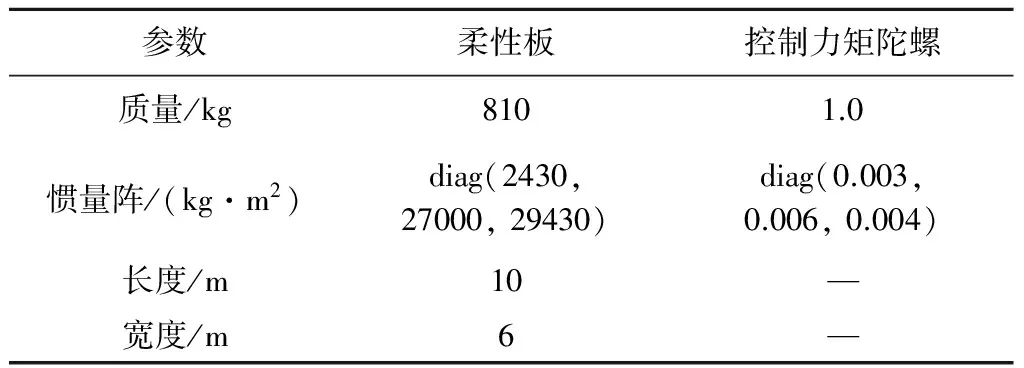
參數(shù)柔性板控制力矩陀螺質(zhì)量/kg8101.0慣量陣/(kg·m2)diag(2430,27000,29430)diag(0.003,0.006,0.004)長度/m10—寬度/m6—
不同案例下的陀螺框架速率如圖9~11所示。從圖9~11可以看出,案例3的陀螺框架速率比案例1和案例2的陀螺框架速率小。因此,案例3的能量消耗比案例1和案例2的能量消耗小,其中案例2的能量消耗最大。這表明混合安裝的執(zhí)行機構(gòu)能夠以相對較小的能量實現(xiàn)較快的振動抑制。能量消耗的多少與執(zhí)行機構(gòu)的安裝位置和安裝方向密切相關(guān)的。案例3中執(zhí)行機構(gòu)有兩種安裝方向,能夠同時提供xb和yb方向的力矩,該力矩能夠?qū)崿F(xiàn)柔性結(jié)構(gòu)的彎曲和扭轉(zhuǎn)振動抑制,而執(zhí)行機構(gòu)安裝在優(yōu)化位置上能夠使陀螺力矩最大效果的用于振動抑制,因此案例3在各階模態(tài)的振動抑制效果較好。而案例1中執(zhí)行機構(gòu)在單一安裝方向下只能產(chǎn)生yb方向的力矩,該力矩能夠較好地抑制柔性結(jié)構(gòu)的彎曲振動,而柔性結(jié)構(gòu)的扭轉(zhuǎn)振動需要通過陀螺與柔性結(jié)構(gòu)的耦合實現(xiàn)。同樣情況案例2中的執(zhí)行機構(gòu)在其安裝方向下只能產(chǎn)生xb方向的力矩,該方向的力矩可以直接用于柔性結(jié)構(gòu)的扭轉(zhuǎn)振動抑制,柔性體的彎曲振動抑制同樣需要陀螺與柔性結(jié)構(gòu)的耦合實現(xiàn)。案例1和2的執(zhí)行機構(gòu)的配置位置能夠使一種方向的振動得到抑制的同時使另一種方向的振動得到有效的抑制。由于柔性結(jié)構(gòu)的振動主要為彎曲振動,案例1產(chǎn)生的力矩能夠直接用于彎曲振動抑制,控制輸入相比案例2更有效,因此案例1的能量消耗比案例2的能量消耗小。
4 結(jié) 論
本文研究了約束陀螺柔性體的執(zhí)行機構(gòu)優(yōu)化配置和主動振動控制問題。將動力學(xué)模型轉(zhuǎn)換為狀態(tài)空間的形式,基于振動抑制的效果提出了約束陀螺柔性體執(zhí)行機構(gòu)優(yōu)化配置的新方法。以線性二次型指標(biāo)最優(yōu)控制的最優(yōu)值為目標(biāo)函數(shù),使用遺傳算法對給定數(shù)目的陀螺執(zhí)行機構(gòu)進行了優(yōu)化配置,討論了陀螺執(zhí)行機構(gòu)在不同安裝方式下的配置,從配置結(jié)果可以看出,執(zhí)行機構(gòu)主要安裝在約束柔性板的兩側(cè)和角上。通過性能指標(biāo)的大小和振動抑制的效果來看,陀螺執(zhí)行機構(gòu)初始方向混合安裝情況要比單一方向的安裝效果好,線性二次型最優(yōu)控制下的混合執(zhí)行機構(gòu)安裝方式能夠?qū)崿F(xiàn)較小陀螺輸入下的有效振動抑制。
[1] 劉天雄,林益明,王明宇,等.航天器振動控制進展 [J]. 宇航學(xué)報, 2008, 29(1):1-12. [Liu Tian-xiong, Lin Yi-ming,Wang Ming-yu,et al.Review of spacecraft vibration control technology [J]. Journal of Astronautics, 2008, 29(1):1-12.]
[2] 姚雨晗,周軍,劉瑩瑩,等.基于輸入成型法的空間站變構(gòu)型過程撓性振動抑制策略 [J]. 宇航學(xué)報, 2013, 34(5):665-670. [Yao Yu-han, Zhou Jun, Liu Ying-ying,et al.Research on flexible vibration suppression strategy for variable configuration space station based on input shaping technique [J]. Journal of Astronautics, 2013, 34(5):665-670.]
[3] 蔡鵬,王慶超.基于自適應(yīng)模糊觀測器的撓性航天器主動振動抑制方法研究 [J]. 宇航學(xué)報, 2009, 30(3):890-894. [Cai Peng, Wang Qing-chao.Active vibration control for flexible spacecraft using an adaptive fuzzy observer [J]. Journal of Astronautics, 2009, 30(3):890-894.]
[4] 王曉磊,吳宏鑫.撓性航天器振動抑制的自適應(yīng)方法及實驗研究 [J]. 宇航學(xué)報, 2005, 30(3):275-281. [Wang Xiao-lei, Wu Hong-xin.Active control scheme and experiment for vibration suppression of flexible spacecraft [J]. Journal of Astronautics, 2005, 30(3):275-281.]
[5] Balamurugan V, Narayanan S. Active vibration control of piezolaminated smart beams [J]. Defence Science Journal, 2001, 51(2): 103-14.
[6] Ning H H. Optimal number and placements of piezoelectric patch actuators in structural active vibration control [J]. Engineering Computations,2004,21(6): 651-65.
[7] 邱志成. 撓性板振動抑制的敏感器與驅(qū)動器優(yōu)化配置[J]. 宇航學(xué)報, 2002, 23(4):30-36. [Qiu Zhi-cheng. Optimal placement of sensors and actuators for flexible plate of vibration suppression [J]. Journal of Astronatics, 2002, 23(4):30-36.]
[8] Kim T W, Kim J H. Optimal distribution of an active layer for transient vibration control of a flexible plate [J]. Smart Materials and Structures,2005, 14(5): 904-16.
[9] Kumar K R, Narayanan S. The optimal location of piezoelectric actuators and sensors for vibration control of plates [J]. Smart Materials and Structures,2007, 16(6): 2680-2691.
[10] 林西強, 任鈞國. 含壓電片層合板的振動控制 [J]. 宇航學(xué)報, 2000, 21(1):91-95. [Lin Xi-qiang, Ren Jun-guo. Vibration control of lam inate plate containing piezoelectric patches [J]. Journal of Astronatics, 2000, 21(1):91-95.]
[11] D′Eleuteriot G M T, Hughes P C. Dynamics of gyroelastic continua [J].Journal of Applied Mechanics, 1984, 51(2): 415-422.
[12] D′Eleuteriot G M T, Hughes P C. Dynamics of gyroeiastic spacecraft [J].Journal of Guidance, Control, and Dynamics, 1987, 10(4): 401-405.
[13] D′Eleuteriot G M T. Dynamics of gyroelastic vehicles[D]. Toronto:University of Toronto,1986.
[14] Damaren C J, D′Eleuteriot G M T. Controllability and observability of gyroelastic vehicles [J]. Journal of Guidance, Control, and Dynamics, 1991, 14(5): 886-894.
[15] Damaren C J, D′Eleuteriot G M T. Optimal control of large space structures using distributed gyricity [J]. Journal of Guidance, Control, and Dynamics, 1989, 12(5): 723-731.
[16] Aubrun J N, Margulies G. Gyrodampers for large space structures [R]. Palo Alto, United States: Lockheed Aircraft Corp, Feb. 1979.
[17] Shi J F, Damaren C J. Control law for active structural damping using a control moment gyro [J]. Journal of Guidance, Control, and Dynamics, 2005, 28(3): 550-553.
[18] Hu Q, Zhang J R. Placement optimization of actuators and sensors for gyroelastic body [J]. Advances in Mechanical Engineering, 2015, 7(3): 1-15.
[19] Chee S A, Damaren C J. Optimal gyricity distribution for space structure vibration control [J]. Journal of Guidance, Control, and Dynamics, 2015, 38(7): 1218-1228.
[20] Jia S Y, Jia Y H, Xu S J, et al. Optimal placement of sensors and actuators for gyroelastic body using genetic algorithms [J]. AIAA Journal, 2016, 54(8): 2472-2488.
[21] Hu Q, Jia Y H, Xu S J. Recursive dynamics algorithm for multibody systems with variable-speed control moment gyroscopes [J]. Journal of Guidance, Control, and Dynamics, 2013, 36(5): 1388-1398.
[22] Han J H, Lee I. Optimal placement of piezoelectric sensors and actuators for vibration control of a composite plate using genetic algorithms [J]. Smart Materials and Structures, 1999, 8(2): 257-267.
ActiveVibrationControlofConstrainedGyroelasticBodywithOptimalPlacementofActuators
JIA Shi-yuan1, JIA Ying-hong1, XU Shi-jie1, LU Shan2, HOU Yue-yang2, WANG Feng-wen2
(1. School of Astronautics, Beihang University, Beijing 100191, China; 2. Shanghai Key Laboratory of Aerospace Intelligent Control Technology, Shanghai Aerospace Control Technology Institute, Shanghai 201109, China)
The optimal placement of the actuators and the active vibration suppression of the constrained gyroelastic body is studied. By simplifying the model of a single gyroelastic body with variable-speed control moment gyros, the linearized dynamic model of the constrained gyroelastic body is obtained. A new method is proposed for the optimal placement of the actuators. This method is directly based on the vibration responses and vibration energy to determine the optimal placement of the actuators. The objective function is chosen as the optimal value of the linear quadratic regulator control. The optimal placement of the actuators is formulated in the frame of the combinatorial integer optimization problem. The genetic algorithms (GAs) are used to solve the combination problem of the constrained gyroelastic body with a fixed number of actuators. The optimal placement of the actuators with different installation directions is studied. The optimized configurations are used to realize the active vibration suppression. The effectiveness and feasibility of the optimized results by the proposed method are validated by the numerical simulations.
Constrained gyroelastic body; Optimal placement; Genetic algorithm; Vibration suppression
2017- 03- 06;
2017- 09- 20
國家自然科學(xué)基金(11272027);上海市自然科學(xué)基金(16ZR1415600), 上海市科技人才計劃(17XD1420700)
V41
A
1000-1328(2017)12- 1297- 10
10.3873/j.issn.1000- 1328.2017.12.006
賈世元(1988-),男,博士生,主要從事多體動力學(xué)與控制方面的研究。
通信地址:北京市海淀區(qū)學(xué)院路37號(100191)
電話:(010)82339751
E-mail:jiashi.yuan@163.com
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
少先隊活動(2021年2期)2021-03-29 05:40:48
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2019年6期)2019-06-24 03:37:50
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
中國公路(2017年7期)2017-07-24 13:56:38
中國衛(wèi)生(2015年4期)2015-11-08 11:16:06