
低空無人機航空攝影高度自動測量方法研究
2018-01-05 01:10:12陳有林
計算機測量與控制 2017年12期
李 楓,陳有林
(青海省柴達木綜合地質礦產(chǎn)勘查院,青海 格爾木 816099)
低空無人機航空攝影高度自動測量方法研究
李 楓,陳有林
(青海省柴達木綜合地質礦產(chǎn)勘查院,青海 格爾木 816099)
為控制低空無人機攝影高度,獲得更加清晰的地理信息圖像,需要對低空無人機攝影高度自動測量方法進行優(yōu)化研究;當前方法主要利用射影幾何知識的自動化標定方法實現(xiàn)低空無人機航空攝影高度的自動測量;該方法存在噪聲影響嚴重,且測量誤差較大的問題;為此,提出一種基于多傳感器與卡爾曼濾波相結合的低空無人機航空攝影高度自動測量方法;該方法首先通過分析氣壓測量法計算各種氣壓因素對低空無人機航空攝影高度的影響,然后推導出大氣對流層內氣壓隨低空無人機航空攝影高度的變化;然后采用雙GPS系統(tǒng)同時工作,對GPS、氣壓高度計和IMU測量獲得的低空無人機航空攝影高度信號進行冗余備份;采用基于二階多項式的修正方法對低空無人機航空攝影傳感器輸出值進行補償和修正;根據(jù)動力學方程建立低空無人機航空攝影的動力學方程獲得高度測量狀態(tài)方程;最后采用卡爾曼濾波的線性最小方差估計準則對低空無人機航空攝影高度進行均方差估計計算,實現(xiàn)低空高度自動測量與校正。實驗結果表明,所提方法具有精度高、收斂性好且濾波效果理想的優(yōu)勢。
低空無人機;航空攝影高度;自動測量方法;多傳感器;卡爾曼濾波
0 引言
為了滿足我國經(jīng)濟建設和社會的可持續(xù)發(fā)展,需要科學、準確地獲取空間地理位置信息,構建數(shù)字化中國和數(shù)字化地球框架[1]。而相關數(shù)據(jù)的獲取方式一直是學術界研究的重點課題。航空攝影測量是地理位置信息獲取的主要方式之一,且我國現(xiàn)在航空攝影測量技術的發(fā)展已經(jīng)成為現(xiàn)代測繪及與之相關行業(yè)高效作業(yè)且不可或缺的一項技術手段,并且不斷向智能化和高效化發(fā)展[2]。通常應用在地理信息的基礎測繪、國土資源勘察與管理、地質勘探等眾多領域。我國現(xiàn)在使用的各種比例尺的地形圖測繪工作都是通過航空攝影測量實現(xiàn)的[3]。從攝影測量這門學科問世以來,攝影測量技術的發(fā)展已經(jīng)有了多次突破式進展,從目標物體的模擬攝影測量、目標物體的解析攝影測量到現(xiàn)如今的數(shù)字攝影測量。隨著攝影測量技術的不斷更新發(fā)展,其作業(yè)方式也不斷提升,對獲取的數(shù)據(jù)信息處理方式也逐漸向自動化模式發(fā)展[4]。當時對地理信息的攝影測量整體作業(yè)流程并沒有質的改變,仍然是先對地理信息進行航空攝影,然后在需要攝影的相關區(qū)域部署大量的地面控制點,再進行空中三角測量的加密運算工作,最后才能獲得并制作出數(shù)字化地理地圖。整個過程極其復雜繁瑣,其作業(yè)周期也比較漫長,且需要花費較多的人力、物力和財力[5-6]。當前我國經(jīng)濟發(fā)展如此之快,這樣的地理信息獲取和更新效率已經(jīng)無法滿足正常生產(chǎn)需要。并且對于在攝影測量區(qū)域部署地面控制點,經(jīng)常會遇到一些人們難以到達甚至是無法到達的地區(qū)和地面控制點難以選取的地區(qū),例如荒漠、大片草原、戈壁等地區(qū),傳統(tǒng)的攝影測量方式都無法正常進行,從而導致了我國西部地區(qū)地理信息測繪以及更新的過于滯后,低空無人機航空攝影測量的出現(xiàn)使得這些問題的解決成為可能[7]。為了控制低空無人機攝影高度,獲得更加清晰的地理信息圖像,需要對低空無人機攝影高度自動測量方法進行研究。對低空無人機航空攝影高度進行高精度自動測量成為該領域的進一步發(fā)展亟待解決的重要問題之一。
文獻[8]提出了一種基于LADRC的低空無人機航空攝影高度自動測量方法,利用LADRC確定低空無人機航空攝影高度總體控制框架,設計低擴展狀態(tài)觀測器觀測估計低空無人機航空攝影縱向高度通道和縱向速度通道中存在的總擾動;然后在控制中引入擾動補償,對低空無人機在航空攝影飛行過程中存在的大氣紊流擾動或大氣離散突風等風干擾信息分析其功率譜密度,計算風擾動對低空無人機航空攝影高度的影響、風擾動對低空無人機航空攝影時域響應特性和穩(wěn)定裕度的綜合目標函數(shù);最后通過粒子群尋優(yōu)算法獲得低空無人機航空攝影控制器參數(shù),實現(xiàn)其高度自動測量。文獻[9]提出了一種基于液壓支架傾角的低空無人機航空攝影高度自動測量方法,該方法在分析影響低空無人機航空攝影高度測量精度因素的基礎上,通過改變低空無人機航空攝影液壓支架傾角傳感器安裝位置,并運用卡爾曼濾波法消除大氣噪聲擾動等其他因素影響,從而實現(xiàn)高度自動測量。存在測量效率較低的問題。文獻[10]提出一種基于單目視覺的低空無人機航空攝影高度自動測量方法,該方法主要利用了結合射影幾何知識的自動化標定方法實現(xiàn)低空無人機航空攝影高度的自動測量。該方法存在復雜氣流擾動影響嚴重的問題。
低空無人機航空攝影高度信息通常由氣壓式傳感器獲取,但其測量誤差會因低空無人機航空攝影高度的降低而增大,為此提出一種基于多傳感器與卡爾曼濾波的低空無人機航空攝影高度自動測量方法,并通過實驗結果驗證,所提方法具有較好的收斂性,且測量誤差較小,很好地抑制了各種噪聲影響。本文以“低空無人機航空攝影高度自動測量方法”為研究課題,對實現(xiàn)無人機航空攝影高度自動測量提出了一些比較新穎的方式方法。將傳統(tǒng)的氣壓測量法與卡爾曼濾波法相結合,實現(xiàn)高度自動測量數(shù)據(jù)處理與濾波,并將其應用到低空無人機實際航空攝影中去。
1 低空無人機航空攝影高度自動測量技術
低空無人機航空攝影高度的自動測量,主要通過分析氣壓測量法計算各種氣壓因素對低空無人機航空攝影高度的影響,然后推導出大氣對流層內氣壓隨低空無人機航空攝影高度的變化,以及重力加速度與低空無人機航空攝影高度之間的關系;最后計算得到低空無人機航空攝影高度為標準氣壓高度。
假設a表示參考海平面(低空無人機的航空攝影高度為0)的參數(shù)值;參考海平面的大氣壓強分布標準值表示為Ta=288.15 K;參考海平面的密度分布標準值表示為Pa=101 325 Pa;參考海平面的的溫度分布標準值表示為ρa=1.225 kg/m3,在大氣對流層中,溫度隨著低空無人機航空攝影高度遞減,即每無人機上升100 m溫度下降0.65 ℃,其關系表達式如下:
T=288.15-0.0 065H1
(1)
其中:H1表示低空無人機距離參考海平面的高度。
在大氣平流層中,當無人機航空飛行高度為11 000~20 000 m之間時,大氣溫度保持為常數(shù),則大氣壓強表示為T=216.65 K;而無人機高度飛行在20 000~30 000 m之間,無人機高度每上升1 000 m,溫度上升1 ℃,其關系表達式如下:
T=216.65+0.001(H1-20 000)
(2)
隨著大氣壓強和大氣密度隨無人機航空攝影高度的變化,在對流層內無人機進行航空攝影時的大氣壓強和大氣密度計算公式分別如下:
(3)
(4)
在大氣平流層內,當無人機航空飛行到20 000 m高度為止,大氣溫度為常數(shù),則無人機在航空攝影時的大氣壓強和大氣密度的計算表達式分別為:
(5)
(6)
其中:P11=22 631.8 Pa;ρ11=0.36 392 kg/m3。
在20 000~32 000 m,無人機在航空攝影時的大氣壓強和大氣密度的計算表達式分別為:
(7)
(8)
其中:P20=5 474.86 Pa;ρ20=0.088 035 kg/m3。
對于低空無人機來說,由于其動力限制和功用不同的原因,飛行高度一般在大氣對流層。利用上述公式(7)、(8),推導出大氣對流層內氣壓隨低空無人機航空攝影高度的變化計算表達式如下:
(9)
根據(jù)《國際標準ISO2533——標準大氣》可知,低空無人機在航空攝影時的大氣氣壓高度HP與大氣壓強PH之間的關系表達式如下:
(10)
其中:Tb表示低空無人機航空攝影時參考基準平面的溫度;Pb表示低空無人機航空攝影時參考基準平面的高度;PH表示低空無人機航空攝影時的測點氣壓;β表示低空無人機航空攝影時本層大氣溫度垂直梯度,在大氣對流層內取值為-6.5 K/km;R表示空氣專用氣體常數(shù);gn表示重力加速度。
如果忽略地球本身自轉的影響,可得重力加速度與低空無人機航空攝影高度之間的關系表達式為:
(11)
其中:G表示地球引力常量;M表示地球本身質量;R′表示地球半徑長度;h表示低空無人機航空攝影高度。
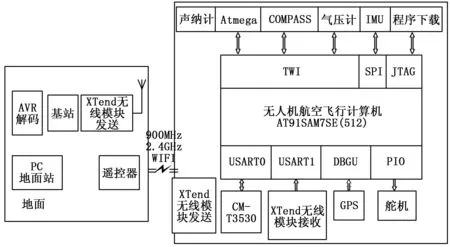
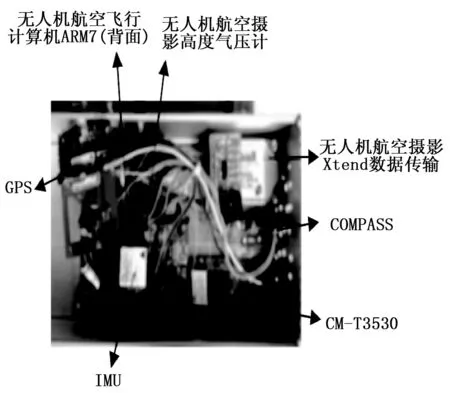
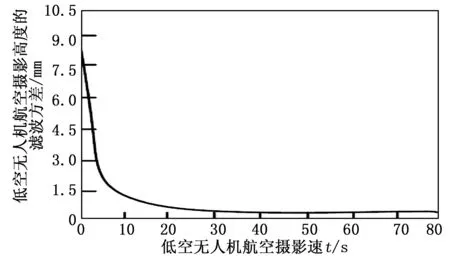
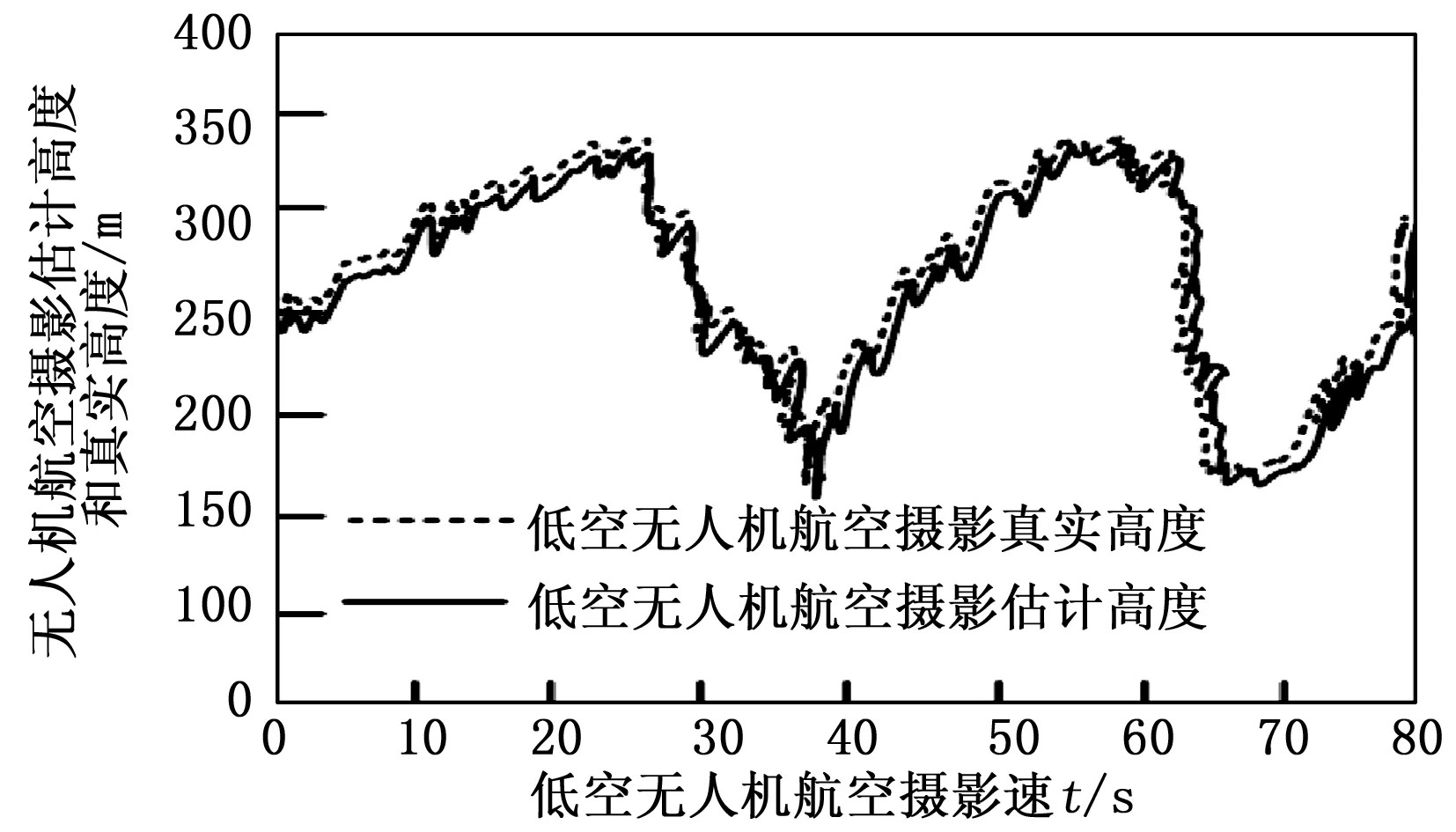
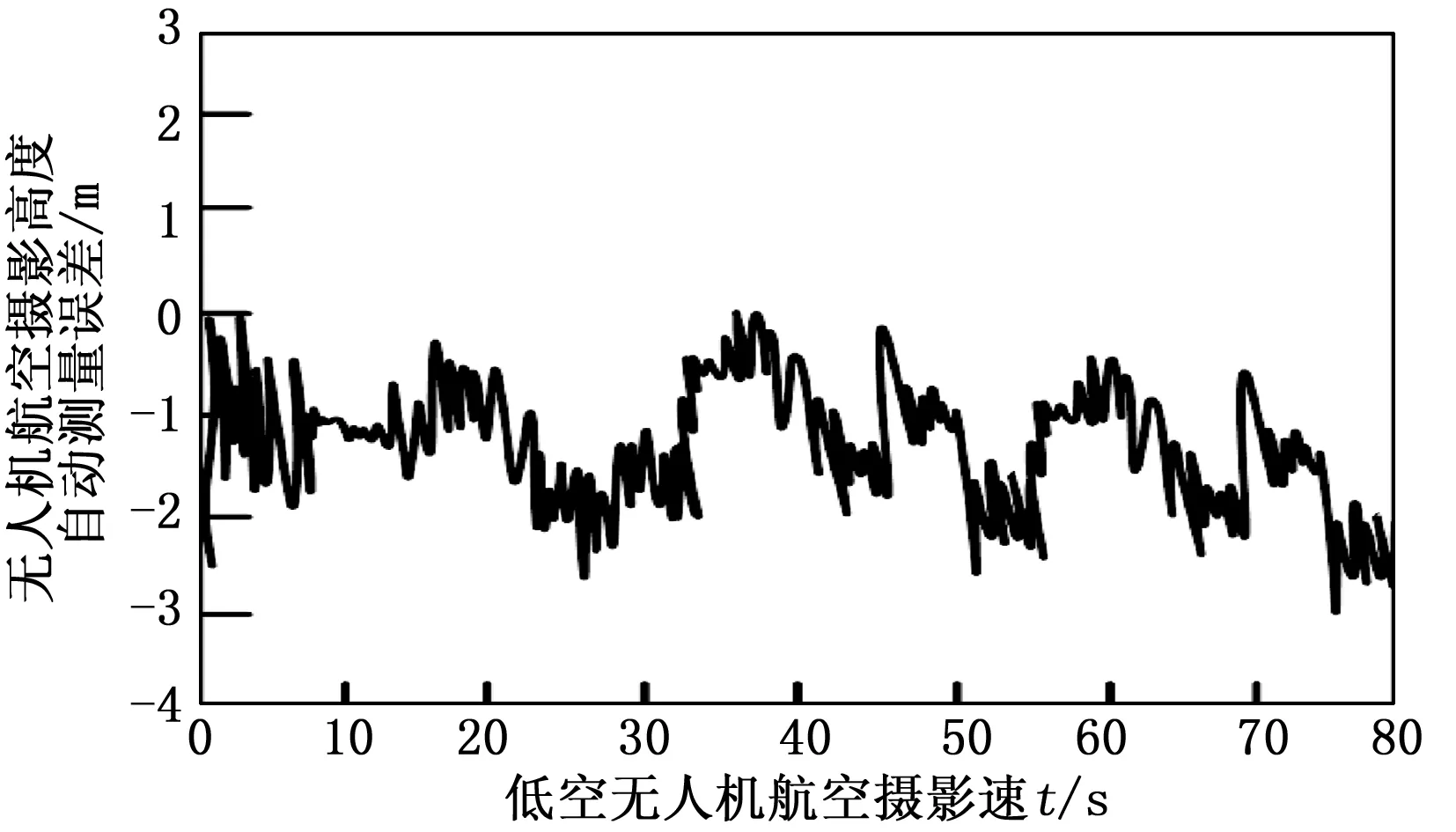
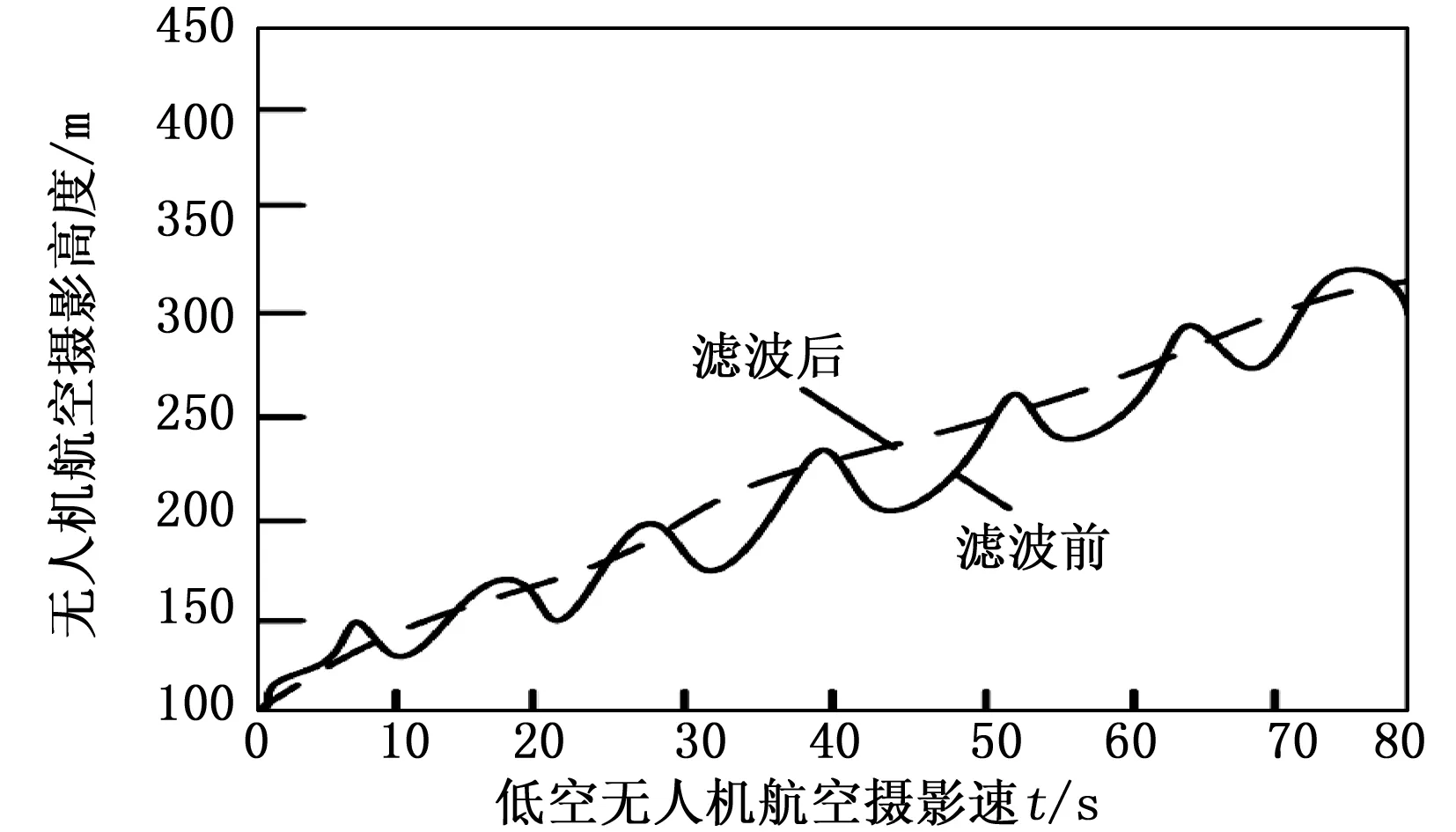
根據(jù)上述公式(11)可知,隨著低空無人機航空攝影高度的不斷增加,重力加速度不斷減小,已知地球的平均半徑約為6 371.393 km,則有h< 當參考基準平面為標準大氣氣壓平面時,有: Tb=288.15K (12) Pb=101 325Pa (13) Hb=0m (14) 則上述公式(10)可以轉換為以下公式(15),從而計算得到低空無人機航空攝影高度為標準氣壓高度。 (15) 當?shù)涂諢o人機航空攝影高度測量的參考基準平面為某一特定平面時,如低空無人機起飛點,Tb、Pb和Hb為該特定平面的氣溫、氣壓和高度值。 目前,利用氣壓傳感器對低空無人機航空攝影高度進行自動測量時,獲得的高度為絕對高度,并不是低空無人機航空攝影的真實飛行高度,無法滿足低空無人機在執(zhí)行起飛、著陸、掠海等任務時所需的真實高度要求。 以第1節(jié)中計算的氣壓測量法為基礎,采用雙GPS系統(tǒng)同時工作,對GPS、氣壓高度計和IMU測量獲得的低空無人機航空攝影高度信號進行冗余備份。具體過程如下所述: (16) (17) 依據(jù)上述低空無人機航空攝影的傳感器模型,采用基于二階多項式的修正方法對低空無人機航空攝影傳感器輸出值進行補償和修正;然后根據(jù)動力學方程建立低空無人機航空攝影的動力學方程獲得高度測量狀態(tài)方程;最后采用卡爾曼濾波的線性最小方差估計準則對低空無人機航空攝影高度進行均方差估計計算,實現(xiàn)低空高度自動測量與校正。 采用基于二階多項式的修正方法對低空無人機航空攝影傳感器輸出值進行補償和修正,其計算表達式分別如下: (18) Cτ=[C0,C1,C2]T (19) 其中:Uτ表示低空無人機航空攝影高度自動測量傳感器溫度補償后的電壓值;Us表示低空無人機航空攝影高度自動測量傳感器溫度未經(jīng)補償?shù)碾妷褐担籆τ表示低空無人機航空攝影高度自動測量時的溫度校正系數(shù)陣;T表示低空無人機航空攝影高度測量的限定性閾值。采用二項式擬合法確定低空無人機航空攝影高度自動測量中的溫度補償,其計算表達式如下: (20) (21) (22) 其中:Ut代表低空無人機溫度傳感器的輸出值;Ct代表低空無人機溫度補償系數(shù)矩陣;U′代表低空無人機的溫度傳感器輸出矩陣。 根據(jù)動力學方程建立低空無人機航空攝影的動力學方程獲得高度測量狀態(tài)方程,其表達式為: -Vcosβsinαcosφcosθ (23) 其中:V代表低空無人機航空攝影速度;θ代表低空無人機航空攝影俯仰角;φ代表低空無人機航空攝影的迎角;β代表低空無人機航空攝影的側滑角。 (24) 根據(jù)式(24)可以看出,低空無人機航空攝影高度測量的最小方差的均方誤差小于或者等于利用其他估計準則計算得到的均方誤差,依據(jù)卡爾曼濾波的最小方差無偏性質可得: (25) 則低空無人機航空攝影高度測量的估計均方差值即為估計誤差的方差值,其表達式為: (26) 根據(jù)上述公式(24)和(26)來校正高度實際自動測量值。 設低空無人機航空攝影時的真實高度計算表達式為: h′=500+10sin(0.1t) (27) 低空無人機進行航海攝影時的真實垂向速度表示為: v=cos(0.1t) (28) 低空無人機進行航海攝影時的真實垂向加速度表示為: a=-0.1sin(0.1t) (29) 假設實驗模擬時間t=200 s。則低空無人機航空攝影高度自動測量時的信號濾波初始狀態(tài)表示為: (30) (31) 低空無人機控制系統(tǒng)主要包括無人機航空飛行計算機、無人機航空傳感器、無人機航空攝影數(shù)據(jù)傳輸系統(tǒng)、無人機航空攝影伺服控制系統(tǒng)、無人機航空攝影地面監(jiān)控系統(tǒng)。無人機航空飛行計算機采用ATMEL公司生產(chǎn)的型號為AT91SAM7SE(512),無人機航空飛行的輔助計算機采用ATMEL公司生產(chǎn)的ATmega16L,無人機航空攝影傳感器主要由IMU、COMPASS、無人機專用高度氣壓計、無人機航空飛行GPS系統(tǒng)、無人機航空飛行聲納計等組成,無人機航空攝影數(shù)據(jù)傳輸系統(tǒng)主要包括無線路由裝置、XTend無線模塊等,無人機航空攝影伺服控制系統(tǒng)主要由無人機遙控器、無人機AVR解碼模塊、無人機4017模塊和無人機5個舵機構成。無人機航空攝影地面監(jiān)控系統(tǒng)主要包括無人機地面監(jiān)控程序和PC機程序。其硬件框架和實物分別如圖1、圖2所示。 圖1 低空無人機系統(tǒng)架構 圖2 無人機航空飛行控制器實物圖 實驗結果如圖3~圖5所示。通過圖3可以看出,低空無人機航空攝影高層自動測量的濾波誤差方差是收斂的,由此說明,采用本文所提方法對獲取的高度信號進行卡爾曼濾波,過程是比較穩(wěn)定的。根據(jù)圖4的低空無人機航空攝影的真實高度和估計高度對比,以及圖5低空無人機航空攝影高度估計誤差曲線可知,本文所提方法對低空無人機航空攝影高度的自動測量精確度更高,可以用來測量低空無人機進行航空攝影時所處的真實高度。 圖3 低空無人機航空攝影高度濾波誤差方差曲線 圖4 低空無人機航空攝影真實高度與估計高度對比 圖5 低空無人機航空攝影高度自動測量誤差 由于低空無人機在航空飛行時有抖動、各種噪聲的干擾,會使得拍攝獲得的原始數(shù)據(jù)具有一定的波動,即毛刺和高度量測噪聲。圖6是經(jīng)過卡爾曼濾波前后數(shù)據(jù)的變化曲線。 從圖6中可以看出,經(jīng)過卡爾曼濾波后,低空無人機航空攝影高度自動測量數(shù)據(jù)平緩很多,穩(wěn)定性有所改善,在低空無人機實際航空攝影中,提高了飛行穩(wěn)定性和精確性。 所提基于多傳感器與卡爾曼濾波相結合的低空無人機航空攝影高度自動測量方法,由于利用多傳感器組合,彌補了當前 圖6 經(jīng)過卡爾曼濾波前后數(shù)據(jù)的變化曲線 方法單個傳感器測量誤差較大的缺點,使得低空無人機航空攝影性能得到一定改善,為日后低空無人機在民用方面的普及奠定了基礎。但是低空無人機航空攝影的自主飛行與控制仍然是該領域里的研究難點,而低空無人機航空攝影高度的自動測量與控制更是難點中的重點,所提方法也仍然存在一些有待提高的地方。例如在傳感器性價比選擇上,能夠在保持傳感器應用性能的基礎上,選擇一些精度更高的傳感器。選取一些精度更理想的GPS高度傳感器,將GPS測量獲得的低空無人機航空攝影高度融合進去,使得測量獲得的數(shù)據(jù)更加真實可靠。使得未來綜合研究設計無人機的自主升降系統(tǒng)成為可能。 [1]賀海鵬,閻 妍,馬 良,等.基于IEKF的四旋翼無人機姿態(tài)測量方法研究[J].計算機仿真,2015,32(4):56-60. [2]趙利芳,荊麗麗.大型無人機電子通訊信號抗干擾方法研究仿真[J].科技通報,2015,31(12):218-219. [3]曹 毓,張小虎,馮 瑩.視覺里程計中的相機姿態(tài)和高度實時測量方法[J].傳感技術學報,2015,28(9):1354-1360. [4]武瑞娟,左澤敏,冀 芳.一種飛機結構變形測量的新方法[J].科學技術與工程,2015,15(7):265-269. [5]王海洋,江 濤,路 平.三傾轉旋翼無人機直升機模式建模與控制研究[J].計算機測量與控制,2015,23(8):2742-2744. [6]劉盛剛,陶天炯,馬鶴立,等.基于白光頻域干涉的大臺階高度測量方法[J].強激光與粒子束,2015,27(9):44-48. [7]金紀東,李思揚,王國娟.基于回旋磁場的智能液體高度測量儀[J].電子設計工程,2016,24(6):174-177. [8]齊鵬遠,王 勇,張代兵.基于LADRC的無人機高精度定高控制[J].北京航空航天大學學報,2016,42(11):2472-2480. [9]陳冬方,李首濱,CHENDong-fang,等.基于液壓支架傾角的采煤高度測量方法[J].煤炭學報,2016,41(3):788-793. [10]錢 鷹,張 夢.基于單目視覺的目標物高度測量[J].計算機工程與設計,2016,37(3):709-713. Research on Automatic Measurement Method of Aerial Photogrammetry in Low Altitude UAV Li Feng,Chen Youlin (Qinghai Institute of Comprehensive Geological mine Prospecting,Golmud 816099,China) In order to control the altitude of low altitude unmanned aerial vehicle (UAV) and obtain clearer geographical information images, it is necessary to optimize the height measurement method of low altitude unmanned aerial vehicle (UAV). The current method mainly uses the automatic calibration method of projective geometry knowledge to realize automatic aerial photogrammetry height measurement of low altitude unmanned aerial vehicle (UAV). The method has the problems of serious noise influence and large measurement error. Therefore, a highly automatic aerial photogrammetry method for low altitude unmanned aerial vehicle (UAV) based on multisensor and Calman filtering is proposed. Firstly, through the analysis of aerial photography has no effect on the height of the low pressure air pressure measurement method for calculation of various factors, and then push the troposphere with low pressure induced no change in aerial photography height; and then the double GPS system work at the same time, for the low altitude GPS, altimeter and IMU measurements obtained the UAV aerial photography altitude signal redundant backup; using two order polynomial correction method based on low altitude UAV aerial photography sensor output value compensation and correction; according to the kinetic equations of dynamics equation of low altitude UAV aerial photography obtained by measuring the height of the state equation; linear minimum variance estimation criterion Calman filtering of low altitude UAV aerial photography were highly variance estimation and realization of low altitude automatic measurement and calibration. Experimental results show that the proposed method has the advantages of high precision, good convergence and ideal filtering effect. low altitude unmanned aerial vehicle;aerial photography height;automatic measurement method;multi- sensor;Kalman filter 2017-07-21; 2017-08-21。 李 楓(1982-),女,寧夏平羅人,工程師,主要從事礦山測量方向的研究。 1671-4598(2017)12-0005-04 10.16526/j.cnki.11-4762/tp.2017.12.002 TP274 A2 低空無人機航空攝影高度自動測量技術應用
2.1 低空無人機航空攝影高度的傳感器測量模型



2.2 低空無人機航空攝影高度自動測量方法的實現(xiàn)






3 實驗結果與分析
3.1 實驗環(huán)境與實驗參數(shù)設定
3.2 實驗測試與分析
4 結束語
猜你喜歡
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年12期)2018-11-25 09:37:34
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
