
基于機器視覺的馬體尺測量系統設計與研究
2018-01-05 00:58:24張婧婧李勇偉
計算機測量與控制 2017年12期
關鍵詞:測量
張婧婧,李勇偉
(1.新疆農業(yè)大學 計算機與信息工程學院, 烏魯木齊 830052; 2.新疆農業(yè)大學機械交通學院,烏魯木齊 830052)
基于機器視覺的馬體尺測量系統設計與研究
張婧婧1,李勇偉2
(1.新疆農業(yè)大學 計算機與信息工程學院, 烏魯木齊 830052; 2.新疆農業(yè)大學機械交通學院,烏魯木齊 830052)
傳統馬體尺的人工測量方法工作量大且存在安全隱患,對此提出基于線性回歸理論和機器視覺技術的馬體尺測量方法,旨在測量馬體的基本數據如體高、體長、胸圍、管圍;首先,在Matlab中利用圖像腐蝕方法得到馬體輪廓,并在2D圖像上精確定位馬體坐標,獲得體高、體長指標;然后,自定義胸徑、管徑指標,代入線性回歸方程預測胸圍、管圍;最后利用Matlab GUI工具設計系統可視化界面,并初步完成系統的仿真測試;仿真結果表明,利用線性相關及線性回歸理論解決3D指標的預測問題,具備測量依據和借鑒意義。
焉耆馬;體尺;線性相關;多元線性回歸; Matlab GUI
0 引言
馬的體尺測量指標分為:體高、體長、胸圍、管圍、頭長、頭寬、尻寬、尻長、胸寬、胸深、胸廓寬、背高、尻高、頸長、肢長等,傳統的人工測量一般采用測杖、卷尺、圓形測定器、測角計等工具進行,測量過程中采集數據的工作量大,且測量人員和馬的安全均缺乏必要的保障,存在安全隱患,因此基于機器視覺的非接觸測量就成為體尺測量領域的熱點技術之一。
目前,基于機器視覺的動物體尺測量改變了接觸式的測量方法,國內相關研究包括:劉同海、滕光輝等人利用背景減法和去除噪聲算法得到豬體體尺測點[1];江杰、周麗娜等人利用背景差分法提取羊體輪廓[2-3];劉波、朱興偉等人運用自動閾值分割與形態(tài)學處理進行輪廓分割[4];趙建敏等人研究了基于 Kinect 傳感器搭建的羊體尺測量系統,利用彩色、深度圖像的多元信息提取羊的體尺[5-6]等等。與此同時,由于3D 機器視覺技術發(fā)展迅速[7-9],現有的激光或其它點云獲取設備也可以用于體尺測量,但其測量成本較高。
借鑒動物體尺的研究成果,依據新疆馬業(yè)協會發(fā)布的地方標準,利用2D機器視覺的技術平臺,模擬多元線性回歸算法,我們建立了新疆馬體尺四項指標的采集模型,旨在完成馬體尺測量系統的初步設計。
1 馬體尺的測量標準
根據新疆馬業(yè)協會發(fā)布的地方標準,測量馬體尺的基本數據包括體高、體長、胸圍、管圍,其測量標準如下:
體高:從鬐甲頂點到地面的垂直距離;
體長:從肩端到臀端的直線距離;
胸圍:在肩腳骨后緣垂直繞胸一周的長度;
管圍:左前管部上1/3部的下端最細處,水平繞其一周的長度。
2 機器視覺的體尺測量方法
2.1 測量方法簡介
在機器視覺的體尺測量系統中,我們選用馬體平面圖像進行體尺數據的采集。在2D圖像中,馬的體高、體長根據平面測量技術即可完成,如圖1中A-A線、 B-B線所示;而在測量標準中,馬的胸圍、管圍的測量均屬3D指標,平面測量很難實現,如圖1中C-C線、 D-D線所示。為此系統測量中定義了馬的胸徑、管徑測量指標,仍然利用平面測量技術完成數據采集,如圖1中E-E線、 F-F線所示(實際坐標與C、D點重合),而該測量方法的核心在于利用2D平面中的各項指標(體高、體長、胸徑、管徑)實現3D空間胸圍、管圍數據的預測。
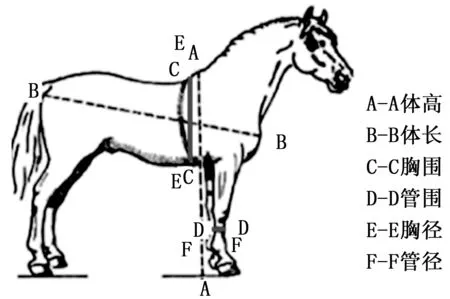
圖1 馬體尺測量的2D示例
2.2 測量方法的理論依據
利用自定義的胸徑、管徑指標完成胸圍、管圍預測的依據來源于矩陣的線性相關理論。相關系數的標準定義如下[10]:
r=E{(x-E{x})*(y-E{y})}/

(1)
其中:E{}為期望值,|r|=1表明兩者相關,|r|=0表明兩者不相關。
我們以20匹焉耆馬的體尺數據為依據,在Matlab仿真軟件中進行了馬體尺各指標之間的線性相關性探討。根據公式(1),調用corrcoef()函數,可以得到了馬體的體高與體長、體長與胸圍、胸圍與管圍、胸圍與胸徑、管圍與管徑間線性關系的數據,如表1所示。

表1 馬體尺指標之間線性相關數據
由表1不難看出,焉耆馬的體高、體長、胸圍、管圍、胸徑、管徑等指標之間滿足兩兩線性相關條件,具有不同程度的相關性。根據多元線性回歸理論,馬體尺各指標之間存在一定線性關系,據此能夠建立多元線性回歸方程,使得借助2D指標進行3D數值的預測成為可能。
3 體尺測量系統的關鍵技術
3.1 2D圖像的輪廓提取
在機器視覺的體尺測量領域,為了增強數據測量的可靠性,首先需要進行圖像的輪廓提取。本設計中,通過調用Matlab的imerode()函數實現2D圖像的腐蝕,其用法為:Imerode(X,SE),其中X是待處理的圖像,SE是結構元素對象;腐蝕后得到圖像的內部像素點,而原圖像減去內部像素點即留下邊界點,即:Iout=I-Ie,本設計中輪廓提取效果如圖2所示。

圖2 馬體尺的輪廓提取效果
如圖2(a)所示,仿真中采用的馬標本與背景顏色相差較大,適于選擇簡易的圖像腐蝕算法得到輪廓,如圖2(b)所示。而實測過程中,當待測動物與背景顏色相差不大,無法單純分割出目標動物輪廓時,還可以采用一維Canny算子、robinson算子以及二維Laplace算子[ 11]等進行圖像邊緣檢測,以提高輪廓提取的準確度。
3.2 建立體尺預測模型
馬體尺模型的建立主要依據多元線性回歸理論,根據多元線性回歸方程:
y=b0+b1x1+…+bpxp+e
(2)
首先,在馬體尺指標中適當選取自變量及應變量x1,x2,…xp,y,根據現有的n組觀測值(xi1,xi2,…xip,yi)i=1,2,…,n.

建立數據回歸模型后,將系統中的實測值代入方程,即能預測平面測量不到的數據。依據此測量方案,我們首先以20匹焉耆馬的體高、體長、胸徑為自變量x1、x2、x3,以胸圍為因變量y,建立多元線性回歸方程[13],如方程(3)所示。
y=-7.2982+0.9273*x1-0.023*x2+0.7713*x3
(3)
其中:r2=0.8393;F=27.8605;P=1.3728×10-6。由P可知,公式(3)的回歸模型成立,即馬體的胸圍預測模型建立。隨后當我們將實測的體高、體長、胸徑代入方程(3),即可預測馬體的胸圍。
同樣,我們以馬的體高、體長、管徑為自變量x1、x2、x3,以管圍為因變量y,建立多元線性回歸方程,如式(4)所示:
y=9.5648+0.0517*x1-0.0120*x2+0.4703*x3
(4)
其中:r2=0.9480;F=97.1776;P=1.7502×10-10。由P可知,公式(4)的回歸模型成立。當我們將實測的體高、體長、管徑代入式(4),即可預測馬體的管圍。
模型的仿真中,我們調用Matlab的線性擬合函數regress()方法[14]建立回歸方程。為了提高預測數據的有效性,初步建模后還針對數據進行rcoplot()殘差分析,剔除異常點,以便準確獲取回歸方程,從而確立預測馬體尺胸圍、管圍的基本模型。
3.3 體尺測量系統的可視化界面設計
鑒于系統的前期設計基于Matlab仿真,后期利用Matlab GUI工具完成系統的可視化設計具有顯著優(yōu)勢。系統交互式界面中涉及的主要控件包括Matlab GUI工具中的axes、pushbutton、edit、uitable、text等控件,其具體功能如表2所示。

表2 交互式界面中控件的主要功能列表
與控件相關的核心代碼如下:
1)在axes中嵌入圖像
(a)打開圖像
[filename, pathname] = uigetfile({'*.bmp;*.jpg;*tif', '(*.bmp), (*.jpg), (*.tif)'; ...
'*.*', 'All Files(*.*)' }, 'Select a face image to be recognized');
filepath = [pathname,filename];%指定圖像路徑
(b)將圖像顯示于axes中
axes(handles.axes2); % axes上面的坐標軸做為當前坐標軸,在其上做圖。
2)獲取、顯示坐標
(a)跟蹤鼠標定位
test_mouse_track();%添加鼠標響應事件
set(gcf,'WindowButtonDownFcn',@ButttonDownFcn);
ButttonDownFcn(src,event) ; %跟蹤鼠標按鍵的動作
get(gca,'CurrentPoint') ;%獲得當前坐標
(b)顯示當前坐標
str = sprintf('x = %.3f, y = %.3f', x, y);
text(x, y, str,'Color',[1,0,0]);%顯示坐標的位置,預測馬體尺測量的準確性
3)計算坐標點的距離并顯示
(a)計算坐標距離


disp(t2);
E=sqrt(t1+t2) ;
(b)顯示測距結果
set(handles.edit4,'string',C); %將計算結果顯示在edit中
4)保存體尺數據到uitable及excel文檔
(1)保存數據至uitable
set(handles.uitable2,'Data',A) ; %數據輸出
(2)保存數據至excel
lswrite('tmp.xls', F, 'sheet1') ; %數據保存
5)數據從excel導入uitable
filename = 'tmp.xls'
B = xlsread(filename); %導入指定文件
set(handles.uitable1,'data',B) ; % 數據導入表格
6)取出數組進行多元線性計算
[b,bint,r,rint,stats]=regress(Y,X,0.05) ;%調用regress方法
7)進行數據殘差分析
rcoplot(r,rint)% 繪制殘差圖
8)數據顯示在edit中
set(handles.uitable4,'Data',A) ; %數據輸出
4 體尺測量系統的設計與初步實現
4.1 系統的設計流程
基于Matlab開發(fā)平臺,測量馬體尺需要依次完成輪廓提取、坐標定位、距離測量、數據保存、數據傳遞、回歸分析、預測值顯示等步驟,其具體流程如圖3所示。界面設計中,圖像的尺寸與實際馬體的尺寸按照比例對應,比例值為1: 42.5。

圖3 體尺測量系統設計流程
如圖3所示,建立預測模型的核心思路在于首先獲取馬體的體高、體長、胸徑、管徑指標,再將體高、體長、胸徑向量代入已建立的回歸方程(3),預測胸圍;然后將體高、體長、管徑數據代入已建立的回歸方程(4),預測管圍,進而完成馬體四項指標的測量模型。
4.2 系統的初步測試
以馬標本圖像的體尺數據為依據,我們在可視化界面中進行系統的設計并初步測試,測試效果如圖4、圖5所示。

圖4 馬體尺的數據測量界面

圖5 馬體尺的數據分析界面
根據圖4可知,受面板尺寸的限制,測量中獲取體長、體高與胸徑、管徑數據分別置于兩副圖像輪廓中操作,降低了坐標定位過程中重復操作、誤操作的可能性。系統仿真中用紅色文本顯示馬體坐標,并將有效坐標用虛線連接,直觀呈現體高、體長、胸徑、管徑的測量數據。同時在數據測量界面,我們選用edit文本框顯示體尺數據的運算結果,并將結果存儲進Excel表格,隨后進入線性回歸分析階段(如圖5所示)。
根據圖5可知,模型預測的指標為馬體的胸圍、管圍。仿真中首先從Execl中提取體高、體長、胸徑、管徑數據,將其傳遞到線性回歸方程中。在此之前,系統首先需要對其進行異常點的排除,并將殘差圖顯示于界面上,以此確認數據的有效性,從而降低坐標定位引起的測量誤差。即在圖5的線性回歸分析區(qū),20條樣本值均在回歸方程的有效計算范圍內波動,殘差分析圖中均呈現綠色的正常點;如某一組測量值代入方程中呈現紅色異常點,則需要剔除并重新測量。
總之,系統正常運行后,所有預測值均建立在馬體尺線性回歸模型的基礎上,每測量一組平面指標(體長、體高、胸徑、管徑)即能預測兩個3D指標(胸圍、管圍)。
5 結語
基于matlab開發(fā)平臺,本系統初步實現了馬體的體長、體高、胸圍、管圍的測量方法,對相關體測系統的開發(fā)具有借鑒意義;系統設計中應用線性相關及線性回歸理論解決2D數據預測3D尺寸的問題,具備測量依據和理論創(chuàng)新;此外,鑒于胸徑、管徑與胸圍、管圍相關系數較高,定義胸徑、管徑作為線性回歸方程的自變量,增強了胸圍、管圍預測的可靠性。值得注意的是,仿真中也存在很多不足之處。如線性相關分析和線性回歸方程均取決于少量馬體尺的樣本數據,因此不可避免地造成體尺預測的準確度不足。較之馬體尺的人工測量過程,基于機器視覺的體測系統對馬的站姿要求更高,對于站姿不標準造成的測量誤差,系統設計中尚無有效的修正方法。
目前,基于機器視覺的動物體尺測量技術已經全面展開。各種測量方案中,依據機器學習、線性擬合理論實現的平面測量方法具備成本經濟、操作簡便的優(yōu)勢,然而較之人工測量,計算過程中坐標定位引起的測量誤差仍無法回避。
[1]劉同海,滕光輝,付為森,等.基于機器視覺的豬體體尺測點提取算法與應用[J].農業(yè)工程學報,2013,29( 2) : 161-168.
[2]江 杰,周麗娜,李 剛.基于機器視覺的羊體體尺測量[J].計算機應用,2014,34( 3) : 846-850,887.
[3]江 杰,岳 偉,曹孟珍.基于機器視覺的羊體體尺測量方法研究[J].內蒙古科技大學學報 , 2015 , (04) : 322-327.
[4]劉 波,朱偉興,霍冠英.生豬輪廓紅外與光學圖像的融合算法[J].農業(yè)工程學報,2013,29(17) : 113-120.
[5] 趙建敏,許曉偉,賈慧媛.基于 Kinect傳感器的羊體體尺測量系統[J].傳感器與微系統,2015,34( 9) : 100-103.
[6]趙建敏,趙忠鑫,李 琦.基于Kinect傳感器的羊體體尺測量方法[J].江蘇農業(yè)科學, 2015(11): 495-499.
[7]郭 浩,張勝利,馬 欽,等.基于點云采集設備的奶牛體尺指標測量[J].農業(yè)工程學報,2014(05):116-122.
[8] Garlie T N, Obusek J P, Corner B D, et al. Comparison of body fat estimates using 3D digital laser scans, direct manual anthropometry, and DXA in men[J]. American Journal of Human Biology, 2010, 22(5): 695-701.
[9] Eder M, Brockmann G, Zimmermann A, et al. Evaluation of precision and accuracy assessment of different 3-D surface imaging systems for biomedical purposes[J]. Journal of Digital Imaging, 2013, 26(2): 163-172.
[10]蔣福坤,劉正春,柴惠文.多維隨機變量的線性相關性[ J] .數理統計與管理,2008, 27(1) : 96-99 .
[11]江笑嬋,萬振凱,陳 利.基于matlab邊緣提取的幾種方法的比較[ J] .電腦知識與技術,2006,2 : 138-141 .
[12] 魏宗舒.概率論與數理統計教程[ M].北京: 高等教育出版社,2008.
[13] 戴金輝,袁 靖. 單因素方差分析與多元線性回歸分析檢驗方法的比較[J]. 統計與決策,2016(09):23-26.
[14]虞曉胤,楊小虎.功能性回歸測試工具分析[J]. 計算機應用與軟件. 2007, 24(05):175-177.
Design and Research of Measurement System of Horse Body Based on Machine Vision
Zhang Jingjing1,Li Yongwei2
(1.College of Computer and Information Engineering, Xinjiang Agricultural University, Urumqi 830052,China;2.Mechanical Transportation College, Xinjiang Agricultural University , Urumqi 830052,China)
The traditional manual measuring method of horse body usually have large workload and security risks.Based on linear regression theory and machine vision technology,we put forward the new measuring method of horse body. The basic data is designed to measure the horse such as body height, body length, chest length, vessel length.Firstly, the image is used to get the horse body contour by image erosion based on Matlab, and the body coordinate is accurately located on the 2D image, so we can obtain the body height and body length index. then, diameter of the chest and diameter of the vessel were defined to predict chest length and vessel length by plugging into equation of linear regression; Finally,we use the Matlab GUI to design the visual interface of the system, and complete the simulation test of the system. The simulation results show that the linear correlation and linear regression theory which can be used to solve the prediction problem of 3D index has the basis of measurement and reference.
Yanqi horse; body size; linear correlation; Linear regression; Matlab GUI
2017-04-09;
2017-05-12。
新疆農業(yè)大學校前期資助項目(XJAU201516)。
張婧婧(1981-),女,碩士,高級實驗師,主要從事嵌入式技術與應用方向的研究。
李勇偉(1973-),男,碩士,講師,主要從事傳感器技術與應用方向的研究。
1671-4598(2017)12-0017-04
10.16526/j.cnki.11-4762/tp.2017.12.005
TP242. 6+2
A
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
