電傳飛行控制系統信號補償技術
2018-01-05 00:58:54杜永良高亞奎
計算機測量與控制 2017年12期
杜永良,高亞奎
(中航工業一飛院,西安 710089 )
電傳飛行控制系統信號補償技術
杜永良,高亞奎
(中航工業一飛院,西安 710089 )
信號的采集精度對控制系統的控制精度有著至關重要的影響,對電傳飛行控制系統常用傳感器的原理特性進行了分析,并根據其工作原理展開討論了影響傳感器測量誤差的非傳感器自身精度的使用問題,即:激勵電源不穩定以及機械安裝所形成的測量誤差;針對電源精度不高所引起的信號波動對采集精度的影響的問題,提出了輸入波動導致的輸出波動的因果補償方法;針對機械零位調節難度大且導致的設計復雜問題,在基于矛盾分離的方法的基礎上,提出了電氣調零的策略;試驗、應用及分析表明,所提出了信號補償方法能夠較容易的提高電傳飛行控制系統指令及反饋信號的采集精度,從而能夠實現系統在整個控制范圍內的高精度控制,降低了系統對機械零位調整以及對高精度激勵電源設計的需求,從而簡化了系統的部件設計。
傳感器;信號補償;控制精度; 電氣零位;機械零位
0 引言
電傳飛行控制系統以來自傳感器的指令及反饋為基礎,以電子信號處理及控制設備為核心,并結合信號傳輸電纜,代替傳統的機械連桿,將飛行員的操縱輸入傳遞到舵面的驅動裝置,簡化了飛行控制系統的設計、制造、調試及控制效能。最新的研究表明,電傳技術為飛行控制系統帶來了革命性的變化[1-2],它使得飛行控制系統可以利用復雜的實時軟件優化被控系統的性能和效率,能夠更靈活地響應變化中的空氣動力環境,通過控制舵面運動使得飛機對操縱輸入的響應在所有飛行條件下都是一致的;放寬靜穩定性,運輸機可以減少部分重量,戰斗機可以減少更多[3-4]。同時由于電傳飛行控制系統能夠對飛機的失速、風切變、超速等復雜狀態提供了很好的保護程序,可以實現飛行員的“無憂慮操縱”。
電傳飛行控制系統的控制指令輸出所綜合的信號主要來自傳感器感知的飛行員操縱裝置位移及力、舵面運動位移、飛機的加速度、角速率等的物理量,當系統采集到的一個或多個信號測量誤差較大時,必將影響系統的控制精度,若同時存在較大的零位誤差時,必導致無操縱需求時非期望的指令輸出,從而帶來飛行員的修正需求,增加操縱負擔。因此,分析電傳飛行控制系統信號采集中可能引起測量誤差的因素,采取合理的改進或補償方法具有重大意義。
1 系統幾類傳感器原理
1.1 變壓器式傳感器
飛行控制系統中的控制和運動參數幾乎都可以用位移或有關位移的參量來表示,因此位移是電傳飛行控制系統中的最重要的參數,測量位移傳感器的可靠性直接影響了整個電傳飛行控制系統的可靠性。差動變壓器式位移傳感器采用非接觸式的物理結構[5-6],故其在工作過程中無觸點機械接觸,從而無噪聲、具有高重復性、高可靠性、理論無限壽命特性,同時它具有靈敏度高、無限分辨率、高頻響應性好[7]。因此,電傳飛行控制系統中對位移的測量幾乎均用了此類傳感器。
差動變壓器式位移傳感器包括角位移傳感器(RVDT)和線位移傳感器(LVDT),原理見圖1。在位移傳感器原邊兩端施加激勵信號后,在匝數相等的副邊兩部分將會感應產生相同頻率的交變信號,將副邊A+和副邊B+與信號輸出端相連,副邊A-和副邊B-可以同時接地,也可以與另一輸出端相接。當角位移傳感器中的鐵芯轉動或線位移傳感器的鐵芯線性移動時,副邊兩部分之間的耦合發生變化,從而使副邊兩部分的輸出電壓大小交錯變化。當角位移傳感器鐵芯的零端點轉動至中央位置或線位移傳感器鐵芯移動至中間時,兩個副邊所產生的感應電動勢大小相等,副邊兩線圈輸出電壓差為零。鐵芯的零端點轉動離中央位置越遠,感應電動勢之差越大,輸出與鐵芯零端點的轉動角度或移動位移成比例,從而實現角度或者位移檢測。

圖1 位移傳感器原理
1.2 滑動變阻式位移傳感器
在電傳飛行控制系統中,有時對位移的測量也可能通過滑動變阻式的傳感器實現。例如,某機上便應用了滑動變阻器式位移傳感器作為攻角以及舵面位置信號的測量。滑動變阻式位移傳感器原理簡單,見圖2所示。滑動變阻器式位移傳感器通過可調觸點位置的改變而檢測位移信號的改變,位置信號通過電阻器可調觸點的不同位置對應輸入信號電壓的分配得到。
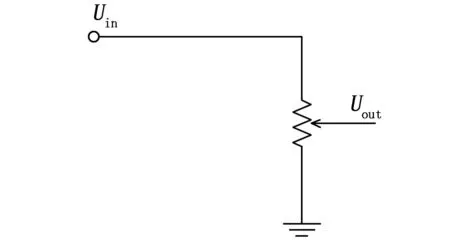
圖2 滑動變阻器式位移傳感器原理
1.3 應變片式力傳感器
對聯動式的雙操縱飛機,為了區分正副駕駛的操縱輸入,在系統設計時均無例外地在雙操縱裝置中安裝了檢測各個飛行員操縱裝置輸入力的力傳感器,力傳感器多用來對事故分析,有時也被用來對位移指令的輔助監控,甚至在駕駛艙操縱裝置卡滯后作為操縱指令實現對飛行員操縱期望的捕獲,控制飛機繼續安全飛行。
目前對駕駛艙桿力的測量多采用應變片測量法,其轉換原理是基于金屬絲的電阻-應變效應。所謂應變效應是指金屬導體(電阻絲)的電阻隨變形(伸長或縮短)而發生改變的一種物理現象。應變片的變形將導致其電阻R值大小的變化,因此通過測量電阻值的變化便可以測量對應的力,電阻值的變化一般通過電橋轉換為電壓信號,圖3給出了電路原理。
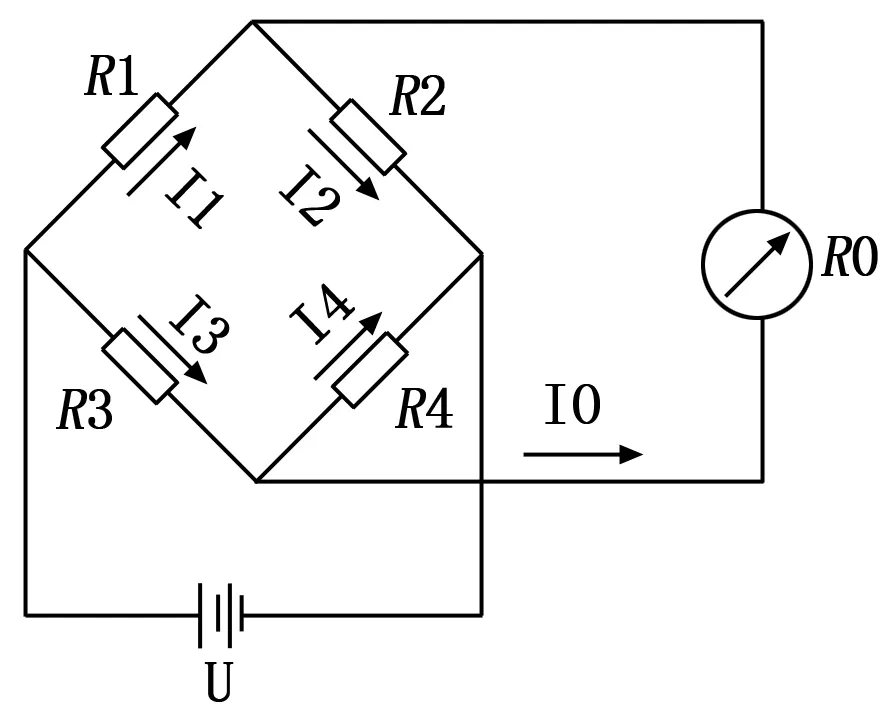
圖3 恒壓電橋轉換電路
2 采集誤差產生的主要因素
2.1 激勵電源誤差
差動變壓器式位移傳感器、滑動變阻式位移傳感器以及應變片式傳感器工作時均需輸入一特定的激勵電源,在激勵電源的作用下傳感器才能感知所要測量的位移及力信號,力或位移大小不同,傳感器便會輸出與力或位移大小相關的電信號。但當激勵電壓變化時,所測量值的輸出電壓同樣也會變化[8],在測量量一定時輸出與激勵電源的電壓變化成正比。所以,使用差動變壓器式位移傳感器、滑動變阻式位移傳感器或應變式力傳感器測量信號時,傳感器的測量輸出必將受到兩種因素的影響:來自系統的激勵電源信號的精度以及來自激勵電源信號所受到的干擾。
2.2 機械安裝誤差
由于電傳飛行控制系統中位移傳感器機械行程一般都比較小,很難保證在安裝駕駛桿盤、腳蹬、作動器作動筒及舵面位移傳感器時使得傳感器電氣零位與測量機械零位完全對應,或多或少會存在小的正差或負差,也因此導致同型號不同架次中機械零位與傳感器電氣零位殘差一致性差,從而降低了電傳飛行控制系統在整個控制范圍內的控制精度。
3 信號補償策略研究
3.1 激勵電源誤差補償
為防止由于激勵電源信號精度所引起的傳感器輸出精度降低的問題,通常的做法是在設計激勵電源的提供者飛行控制計算機時對激勵電源的精度均提出了很高的要求,這無形使得飛控計算機的設計成本極大增加,同時由于高精度要求,使得此類電源難以加增短路保護功能,在出現短路故障后,極易出現故障蔓延,在一定程度上影響了飛控計算機乃至整個系統的可靠性。另一方面,高精度的電源設計也不能消除外界干擾對激勵電源影響而導致的精度降低問題。
針對目前方法的難點及存在的不足,提出如下方法解決,即:通過串接在激勵電源端的輸出電阻以限制輸出端短路時的電流,進行短路保護;利用傳感器的采集增益固定的原理補償電源精度不高的波動對信號采集精度的影響,即:飛控計算機采集施加到傳感器的激勵信號的大小為B,同時采集傳感器反饋信號的值為A,以兩者的比值除以傳感器的理論增益K,隨后乘以傳感器的測量量程S,便可以得到不受激勵電壓大小變化的測量值T,用以下公式表示即:
(1)
串接電阻的使用,保障了在接口短路的情況下對計算機輸出的保護,激勵電源與信號輸出同增益隨動原理的應用消除了激勵電源不穩定時信號采集精度下降的問題,見圖4所示。
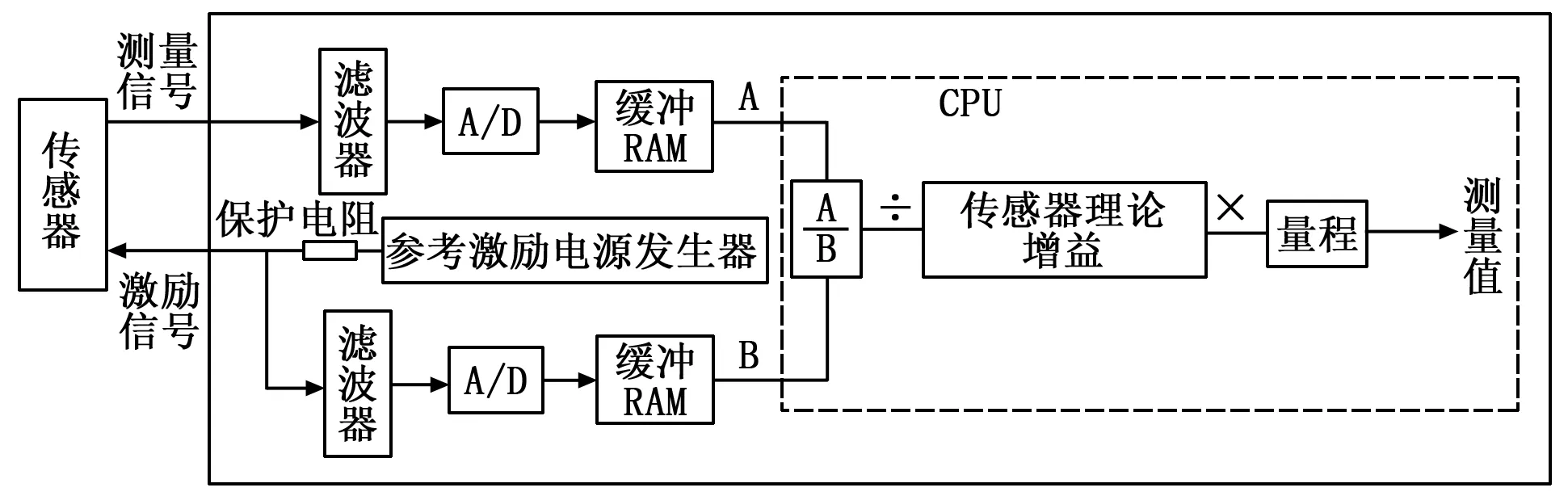
圖4 電源不穩時傳感器信號的補償原理
3.2 機械安裝誤差補償
通常降低對電傳飛行控制系統對由于安裝而引起的系統指令及信號誤差的做法是預留機械調整的功能,如對駕駛艙指令傳感器是將機械操縱裝置固定于機械零位,通過調整螺母而調整傳感器機械桿的相對長度,對作動筒調整通常是在控制指令為零時,采用調整片的方式將作動筒的輸出調整至機械零位。機械式零位調整方法雖然能夠在一定程度上解決初裝零位誤差大的問題,但其加大了設計的復雜性、調整難度大且調整后的各架次間零位信號一致性差。
根據TRIZ創新思維方法[9]將此技術矛盾抽象為分析所需要的技術參數。改善的參數:28測量精度;惡化的參數:34可維修性。利用文獻[9]中的矛盾矩陣得到四條創新原理:1、32、13、11。
在解決問題的過程中,可以將TRIZ創新原理1分割原理和13反向作用原理結合起來應用,即:將信號采集分為機械零位與電氣零位,從而引出機械調零與電氣調零,在調整時讓可動部分機械調整不動不動部分電氣零位可動,也就是說通過減除在傳感器初始機械零位時的電氣信號,從而實現傳感器測試信號的平移,實現對零位乃至整個行程信號的精確測量,其原理見圖5所示。
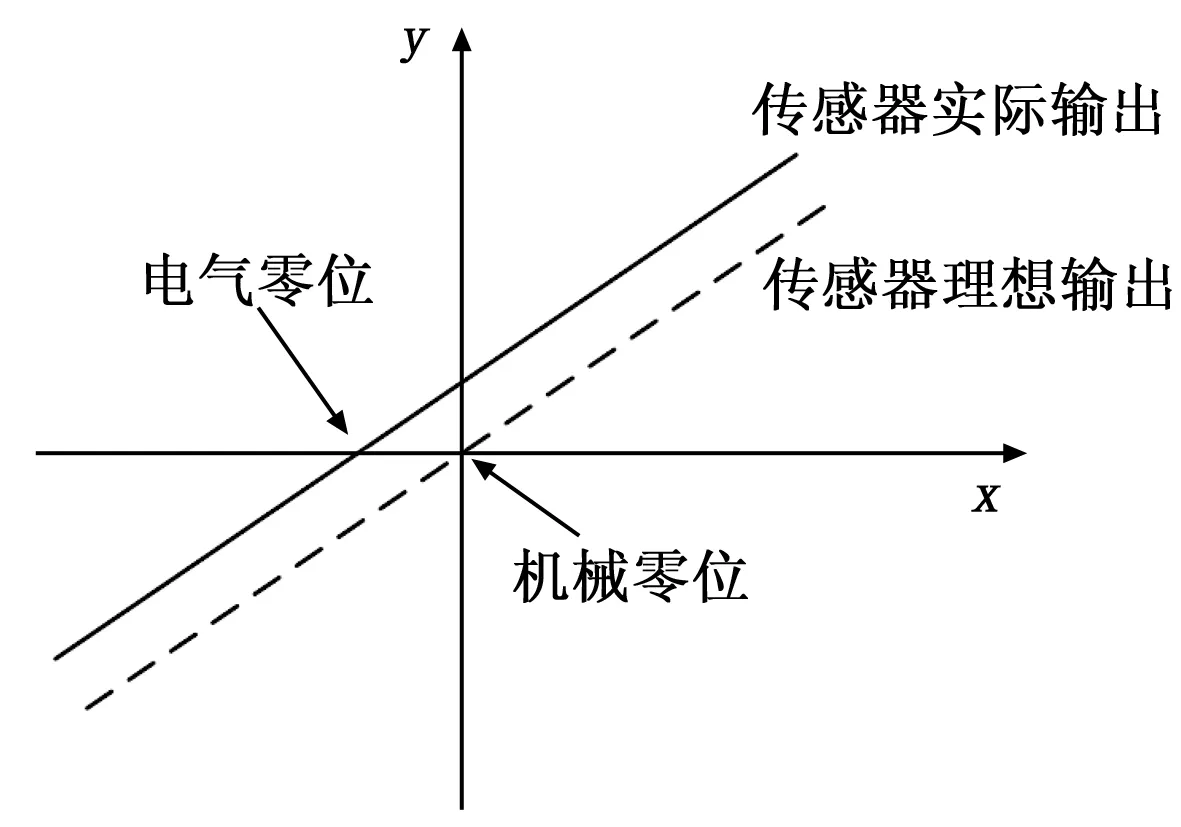
圖5 機械及電氣零位殘差傳感器輸出
4 機械安裝誤差補償實施方式
4.1 機械安裝誤差調整說明
對機械安裝誤差的傳感器測量信號的平移方法可被稱為電子修正,此方法可完全通過軟件來實現,設備安裝后,只要機械行程被包絡在測量傳感器的線性測量范圍之內,均可通過此方法實現有效的調整。從此來看,本方法能夠完全消除對傳感器機械安裝調整的需求,但并不是說傳感器可以隨意安裝,在系統設計時仍舊應盡可能使得傳感器的電氣零位與測量裝置的機械零位接近。
4.2 系統信號電子修正策略
由上文分析可知,電子修正即是在系統工作時,通過軟件的方法去除機械安裝誤差所帶來的測量值部分的電氣輸出作用,其可以完全實現軟件中所得到的電氣零位與機械零位完全對應,從而達到調零的作用。電傳飛行控制系統的電子修正需要在飛行控制計算機初次裝機時完成,需要飛行控制系統進入維護模式,其實現過程主要是為各測量量構造零位,并將零位殘差記錄到飛控計算機中,以便于后續指令解算時去除殘差對測量精度的影響,電子修正的原理參見圖6所示。
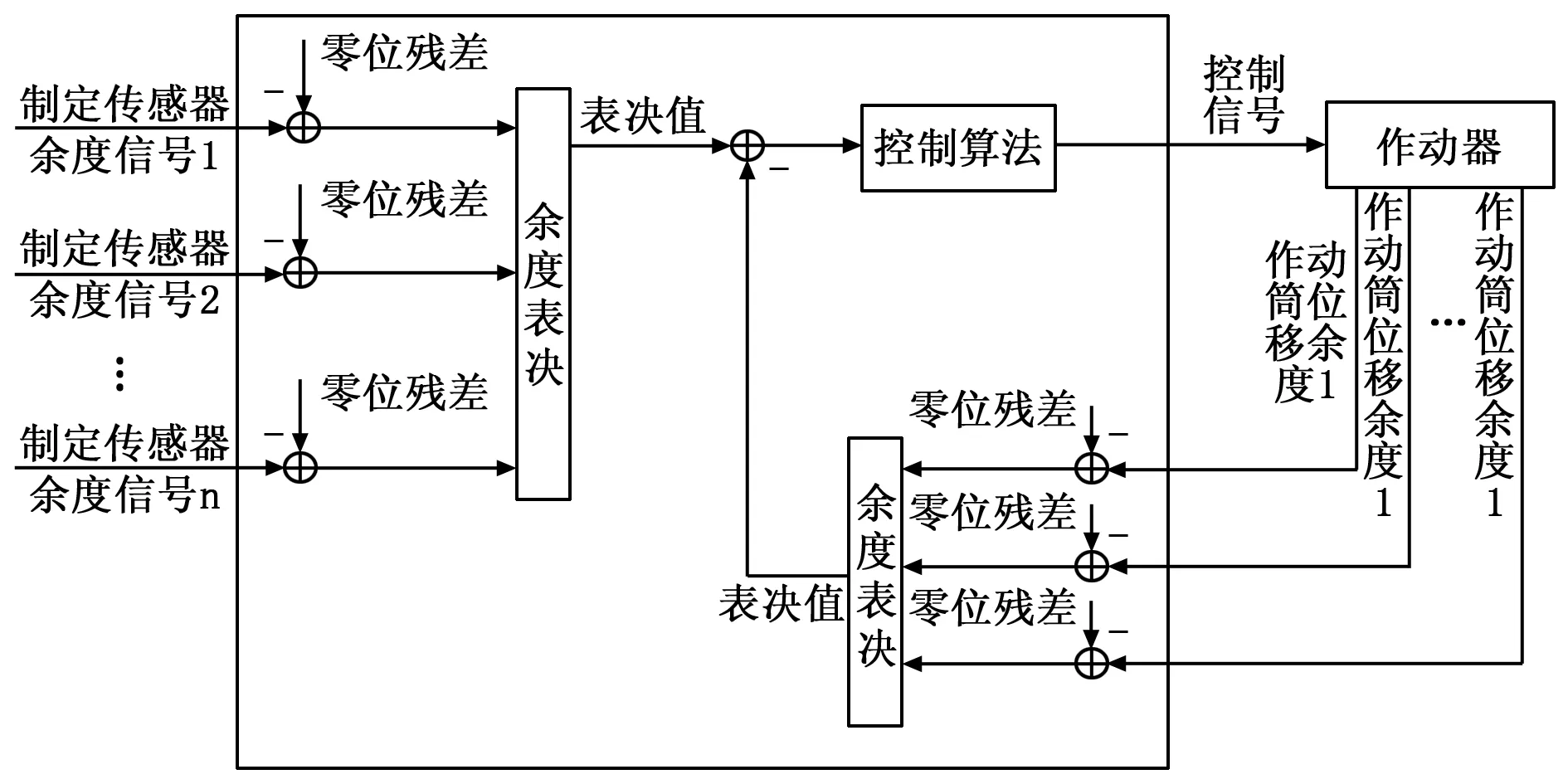
圖6 機械零位傳感器信號的電子修正
電傳飛行控制系統中位移傳感器的電子修正方法根據其歸屬于輸入部件或輸出部件不同而不同,下文分別做以簡述。
對歸屬于輸入部件的修正是確保其在機械零位時,記錄其傳感器的電氣信號,工作過程中通過軟件恒定減去記錄的零位值。如對駕駛艙指令位移傳感器包含:橫向位移、縱向位移及航向位移的修正程序步驟一般如下:
步驟一,將機械輸入拉桿及腳蹬中立位置銷插好(以確保其位移機械零位);
步驟二,確保飛控計算機進入地面維護模態,并在地面維護設備中啟動修正程序;
步驟三,飛控計算機讀取各指令傳感器零位電氣信號,如果各指令傳感器零位電氣信號均小于預先分配的傳感器機械量程的比例,將其記錄在飛控計算機非易失性存儲器NVM中作為零位補償值,如果大于允許值,修正程序便報告一個故障。
對歸屬于輸出部件的修正是通過計算機輸出一定的值使得輸出部件到達機械零位后,記錄到達機械零位的輸出值,工作過程中通過軟件恒定加上記錄的零位值輸出值。如對舵面反饋位移信號一般包含:升降舵、方向舵、副翼作動筒位移傳感器及各舵面位移傳感器通常的修正序步驟如下:
步驟一,確保液壓系統進入正常工作狀態;
步驟二,確保飛控計算機進入地面維護模態,并在地面維護設備中啟動修正程序;
步驟三,在維護系統中通過后端輸出指令控制作動器運動從而帶動舵面運動,當舵面從視覺上對準中立位置時,且作動筒位移信號在于預先分配的傳感器機械量程的補償范圍內,通過用戶確認將此值記錄到飛控計算機非易失性存儲器NVM中作為零位補償值,如果大于預設值,修正程序便報告一個故障;
步驟四,讀入各舵面機械零位時的舵面位移傳感器電氣零位信號,如果各舵面位移傳感器零位電氣信號均小于預先分配的傳感器機械量程的比例,將其記錄在飛控計算機非易失性存儲器NVM中作為零位補償值,如果大于允許值,修正程序便報告一個故障。
5 試驗結果與分析
在試驗室條件下,根據上述激勵電源誤差補償原理與機械安裝誤差補償原理設計了測試硬件支持電路相應的測試驗證軟件。對應用本文所設計的補償方法前后激勵電源波動及干擾情況下傳感器測試的穩定性,以及傳感器電氣與機械零位不一致時測試信號的精度進行了對比測。試驗結果表明,所設計的激勵電源補償的信號采集方法能夠有效抑制激勵電源不穩定和受到干擾情況下對測試結果的影響,測試信號穩定性高;機械與電氣零位偏差的電子修正法能夠消除安裝所帶來的零偏,提高位置信號檢測的精度。
6 結束語
所提出的信號補償方法已應用于某電傳飛行控制系統的設計中,其中部分成果已獲得發明專利。
試驗、實際應用效果以及分析表明,所提出的信號補償方法設計簡單、通用性好,能夠有效消除飛控計算機激勵電源不穩定時所引起的測試信號不穩定、激勵電源受干擾時導致的測量信號受干擾、以及機械安裝誤差而引起的系統測量誤差大的問題,從而能夠:提高同型號不同架次飛機位移指令及信號的一致性,提高各余度信號的一致性,降低余度表決的虛警率;提高電傳飛控系統控制系統整個控制范圍內指令信號及反饋信號精度,從而提高電傳飛行控制系統整個控制范圍內的控制精度;同時降低了機械部分設計以及飛控就是計算機設計的復雜性,在節省設計成本的同時能夠提高了系統的維護性。
[1] Liu M, Zhang L, Shi P, et al. Robust Control of Stochastic Systems Against Bounded Disturbances With Application to Flight Control[J]. IEEE Transactions on Industrial Electronics, 2014, 61:1504-1515.
[2] Zheng X Q, Liang T, Bin Z, et al. Design and simulation of a self-repairing flight control system for UAV[A]. Control and Decision Conference (CCDC), 2012 24th Chinese[C]. IEEE, 2012:1732-1736.
[3] Kwatny H G, Bennett W H, Berg J. Regulation of relaxed static stability aircraft[J]. IEEE Transactions on Automatic Control,1991, 36:1315-1323.
[4] Junkui Y, Zaikang Q. Control Analysis and Autopilot Design for Static Unstable Missiles[A]. 2010 International Conference on Electrical and control Engineering(ICECE) [C]. IEEE, 2010:623-628.
[5] 飛機設計手冊[M] . 北京: 國防工業出版社, 2003.
[6] 杜永良, 潘妍紅.波音777飛機高升力控制系統余度管理分析[J].民用飛機設計與研究,2012(3):33-34.
[7] 張西濤. 某電傳飛控系統角位移傳感器設計優化[J]. 測控技術, 2013, 32(12):9-12.
[8] 杜永良, 高亞奎. 位移傳感器仿真器設計[J]. 計算機測量與控制, 2015, 23(10):3492-3493.
[9] Savransky S D. Engineering of creativity: Introduction to TRIZ methodology of inventive problem solving[M]. CRC Press, 2002.
Fly-by-wire Flight Control System Signal Compensation Technique
Du Yongliang, Gao Yakui
(AVIC First Aircraft Institute, Xi′an 710089, China)
Signal acquisition accuracy has a great influence on the control accuracy of the control system, the sensors characteristics of flight control system are analyzed, and the using problems of sensor like power supply instability and mechanical installation zero which influence the measurement precision were also discussed. In view of the influence of power fluctuation on the accuracy of signal acquisition accuracy problems, proposed a causal compensation method to solve the volatility of the output caused by fluctuation of input. To the difficulty of mechanical zero adjusting and thus caused the design complexity, the strategy of electrical adjusting zero is put forwarded based on the method of contradiction separation. Analysis and application shows that the proposed methods can realize signal compensation for fly-by-wire control system command and feedback signals acquisition accuracy more easily, thus can realize the control accuracy of the system in the whole control range, reduce the system demand for mechanical zero adjustment and high precision excitation power supply, thus simplifying the design of system components.
sensor;signal compensation; control precision; electric zero; mechanical zero
2017-05-03;
2017-05-30。
杜永良(1979-),男,陜西富平人,博士生,高級工程師,主要從事飛行控制系統設計方面的研究
1671-4598(2017)12-0064-04
10.16526/j.cnki.11-4762/tp.2017.12.017
V249.1
A
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代工人(2020年8期)2020-05-25 09:07:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
