
一種航天器推進劑補加飛控模擬器設計
2018-01-05 01:00:15程偉,梁克
計算機測量與控制 2017年12期
程 偉,梁 克
(中國空間技術研究院 載人航天總體部,北京 100094)
一種航天器推進劑補加飛控模擬器設計
程 偉,梁 克
(中國空間技術研究院 載人航天總體部,北京 100094)
推進劑補加飛控模擬器是飛控中心用來驗證推進補加程序和地面測控方案、訓練操作人員的模擬仿真系統,為系統演練構造一個盡量逼真的任務環境;提出了一種用于推進劑在軌補加任務準備的飛控模擬器設計,詳細介紹了系統結構和原理, 給出了系統信息流向、軟件設計,最后對主要技術難點及解決措施進行了說明,該模擬器具有真實性高、通用性高及靈活性高的特點,可以實現對推進劑在軌補加過程的動態模擬,在我國首次推進劑補加任務準備中得到了充分的應用和驗證,取得了較好的效果。
航天器; 推進劑補加; 飛行控制; 模擬器
0 引言
推進劑在軌補加技術為空間站建造所必需的關鍵技術之一,目前國際空間站上所用的推進劑補加系統采用是俄羅斯的補加技術,其基本過程為:攜帶推進劑的貨運飛船(補加航天器)與空間站(被補加航天器)對接,空間站通過自身攜帶壓氣機為膜盒貯箱建立低氣壓環境,利用壓力差將貨運飛船攜帶的推進劑傳輸至空間站膜盒貯箱。
目前我國正在開展航天器推進劑在軌補加技術的攻關及研制工作,其中推進補加程序[1]及推進劑在軌補加的飛控實施過程是掌握推進劑在軌補加技術的重要組成部分。因此有必要研制推進劑在軌補加飛控模擬器,用于飛控中心任務準備階段開展航天器推進劑在軌補加飛控任務的演練工作,包括對推進補加流程及程序進行演練、對推進補加飛控實施方案和實施流程進行驗證、對推進補加飛控地面監控軟件進行測試、對參加飛控試驗人員進行訓練等[2-4]。本文介紹了一種航天器推進劑在軌補加飛控模擬器的設計方案,可以實現對推進劑在軌補加過程的動態模擬,具有真實性高、通用性高、靈活性高的特點,可有效驗證推進補加飛控實施方案和實施流程的有效性和正確性。
1 系統結構及原理
1.1 系統結構
推進補加模擬器包括補加仿真計算機和被補加仿真計算機兩部分,與實現其他功能的數管仿真計算機、測控仿真計算機、姿軌控仿真計算機、仿真主控機等共同組成了飛控中心的地面飛控模擬器系統,各仿真計算機之間通過以太網連接進行通信;飛控模擬器系統又與飛控中心的數字仿真系統、任務系統一起構成任務演練的數據回路與仿真環境。其中,仿真主控機可以本地發起控制命令或接收并轉發數字仿真系統通過網絡傳送的控制命令,實現對相應模擬計算機的控制,任務系統的遙控指令和注入數據經數字仿真系統統一發送到飛控模擬器系統,飛控模擬器系統正確響應后,生成相應的遙測參數再經數字仿真系統送回任務系統進行處理和顯示,地面飛控模擬器系統和系統演練回路組成如圖1所示。
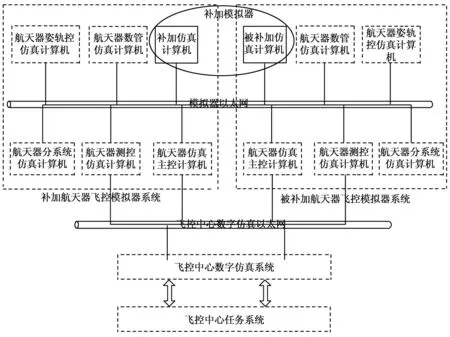
圖1 地面飛控模擬器系統和系統演練回路組成
推進補加飛控模擬器硬件系統由2臺仿真計算機組成,分別對應補加仿真計算機和被補加仿真計算機,其中兩臺仿真計算機實現的主要功能及對外接口相同,只是各仿真計算機具體的配置參數存在差異;每臺仿真計算機軟件系統由Windows操作系統和推進劑補加仿真軟件組成,仿真軟件采用Visual C 進行開發,采用多線程和模塊化、構件化設計思想,以提高軟件的通用性和可復用性。推進補加飛控模擬器實現的功能包括對補加過程中遙測參數進行動態仿真模擬,模擬航天器上補加管理計算機的控制、采集及處理功能,模擬推進補加的故障模式,模擬兩補加航天器間的信息交互,以及模擬與其他設備間的通信等功能。具體如下:
1)通過以太網與其他仿真計算機進行通信,如控制命令的接收、遙測參數的定時輸出、信息交互數據的收發等;
2)接收到仿真主控機的控制命令后,實現仿真的啟動、停止及跳時功能,以及在任意時刻的斷點保存及重新啟動功能;
3)實現對推進補加各種故障模式的模擬,以及根據控制命令實現故障模式的加載及撤銷的功能;
4)對接收到的推進補加指令、注入數據進行判斷、解析處理及響應;
5)對推進補加過程中的遙測參數進行動態仿真模擬,進行組包后輸出下行并送地面任務監顯系統進行顯示;
6)接收來自另一補加仿真計算機的補加信息交互數據,進行判斷和處理;根據自身遙測狀態定時更新補加信息交互數據幀內容并輸出給另一補加仿真計算機,實現兩補加航天器間狀態的同步。
1.2 基本原理
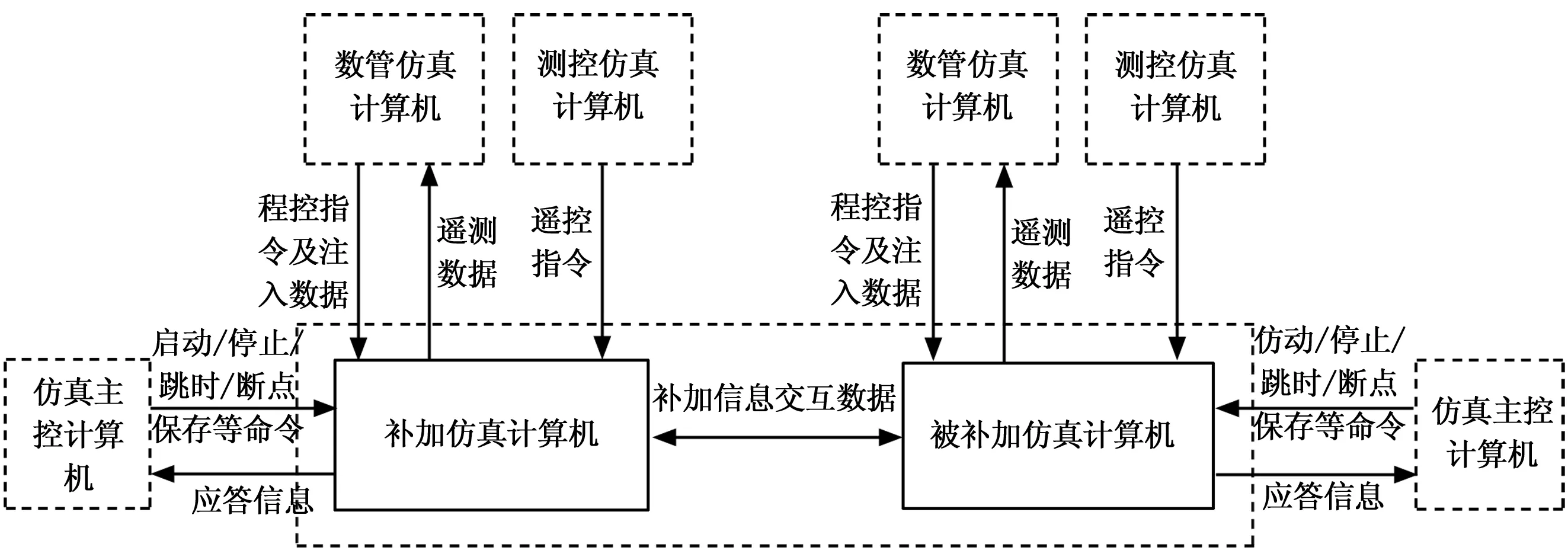
圖2 推進補加飛控模擬器內外部數據信息流
航天器推進劑在軌補加的基本原理為:補加航天器與被補加航天器對接形成組合體后,首先由地面發送指令完成兩航天器間推進劑管路物理上的連通,然后進行補加管路檢漏,確認兩航天器補加管路系統密封性能滿足要求后,地面發送指令給被補加航天器,并啟動壓氣機將被補加航天器推進劑貯箱中的增壓氣體回抽到推進氣瓶中,待貯箱中的增壓氣體壓力下降到預定值后停止壓氣機抽氣,地面發送指令打開兩航天器相應的補加閥門,由補加航天器將其推進劑貯箱中的推進劑通過補加管路輸送給被補加航天器的推進劑貯箱,推進劑輸送完成后地面發送指令對相關補加管路進行吹除,保證兩航天器分離時管路中不會有殘留的推進劑。在整個補加過程中,補加管路及氣瓶的溫度、壓力及貯箱剩余量等參數,以及補加過程中各設備的遙測參數、補加狀態信息等均隨著補加動作的執行及補加階段的變化而改變,同時兩航天器間周期交互關鍵狀態信息,并進行相應的判斷和處置。
推進補加飛控模擬器實現對以上補加過程的動態仿真,如遙測參數的模擬、指令及注入數據等補加動作的響應處理、航天器間的信息交互、故障模式模擬等,模擬器主要功能實現的原理如下:
1) 遙測參數仿真模擬:推進管路、氣瓶及貯箱等的溫度、壓力、剩余量等為緩變類型數據,隨時間動態變化,如壓氣機抽氣過程中,氣瓶壓力隨時間逐漸增加、貯箱壓力逐漸減小,可以建立隨時間變化的數學仿真模型,軟件依據數學模型進行實時計算并按固定周期對這些遙測參數值進行數值更新,從而實現對這些遙測參數的動態模擬;對于補加設備的開關機狀態參數、補加過程中的狀態信息、閥門開關狀態等,地面無上行指令時其遙測為固定的狀態,僅當接收到地面發送的指令或注入數據執行相應補加動作時其參數值才發生變化,當軟件接收到指令或注入數據信息時進行解析、識別和處理,按照預期值對該指令對應的遙測參數進行數值設置,實現對補加動作的響應。
2) 補加信息數據交互:兩航天器間信息交互內容為補加過程中的關鍵狀態量,如補加故障狀態信息、補加到位信息等,其數據來源均為補加遙測參數,并隨補加過程的開展動態更新。由補加模擬器軟件根據遙測參數最新狀態按照信息交互的通信周期對數據幀中的參數值進行定時更新并組包輸出,并對接收到的信息交互數據進行解析判斷及相應處置。
3) 故障模式模擬:對于某一故障模式,當故障發生時,其對應的遙測參數會發生變化。模擬器按照故障模式中的故障判據對該故障相關的遙測參數進行數值設置,從而實現對該故障現象的模擬,同時采用數據庫索引方式對所有的故障模式進行存儲和區分,實現對所有故障的模擬。
2 信息流向
推進補加飛控模擬器內外部數據信息流如圖2所示,箭頭方向代表數據流向,由于兩臺仿真計算機對外接口功能相同,因此以其中的補加仿真計算機為例進行說明。當補加仿真計算機接收到數管仿真計算機的程控指令和注入數據,或接收到測控仿真計算機的遙控指令時,對指令及注入數據內容解析、識別后進行相應功能的模擬,對與指令或注入數據相關的遙測參數動態模擬其數值的變化,并周期性將遙測數據組包發送給數管仿真計算機,由數管仿真計算機按照航天器的遙測格式統一進行組幀輸出至地面任務監顯系統進行顯示,從而實現遙測數據的動態變化模擬;補加仿真計算機接收到來自仿真主控計算機的啟動、停止、跳時及斷點保存、故障模擬等命令后,解析處理后進行相應操作,并回復操作完成應答信息;補加和被補加兩個仿真計算機間依據約定的數據格式和通信周期進行相互通信,并根據接收到的數據內容狀態進行相應處置,實現補加過程中信息的實時交互,如補加故障狀態字、補加到位信息等,保證兩航天器間的補加狀態信息的同步。
3 軟件設計
3.1 軟件組成
本系統軟件要實現的功能比較復雜,為了提高補加模擬器系統的可維護性、可擴展性,采用模塊化設計思想,由于兩臺仿真計算機主要功能需求相同,只是具體的配置參數不同,因此兩臺仿真計算機軟件采用相同的功能模塊設計。根據功能需求,將每臺仿真計算機的軟件劃分為以下幾大模塊:網絡通信功能模塊、指令及注入處理功能模塊、遙測模擬功能模塊、補加信息交互功能模塊、補加故障模擬功能模塊、控制功能模塊及數據庫功能模塊,每臺補加仿真計算機內部各功能模塊間數據交互關系如圖3所示。

圖3 軟件各模塊間數據交互關系圖
3.1.1 網絡通信功能模塊
網絡通信功能模塊采用UDP協議實現兩個補加仿真計算機間,及與其他仿真計算機之間的以太網數據交互:1)接收網絡報文數據,根據約定的報文功能類型進行識別,并轉發給相應的功能模塊進行處理;2)將各功能模塊的數據組成網絡報文數據后發送給其他仿真計算機。
3.1.2 指令及注入解析功能模塊
指令及注入解析功能模塊接收來自網絡通信模塊轉發的遙控指令、程控指令及注入數據,從中提取出指令或注入數據對應的編碼,根據編碼查詢數據庫中指令或注入數據對應的遙測參數,將查詢結果送遙測功能模塊,由遙測功能模塊實現遙測參數對指令的響應變化。
3.1.3 遙測模擬功能模塊
遙測模擬功能模塊主要實現對航天器補加子系統所有遙測參數的動態模擬:1)對地面發送的指令或注入數據進行動態相應,模擬相關遙測參數的變化,如接收到補加閥門開關指令后實時更新補加閥門的開關狀態遙測信息;2)實現對補加管路、閥門及氣瓶等的溫度、壓力參數,推進劑剩余量參數,壓氣機轉速等相關參數的動態模擬;3)實現對補加故障狀態參數的動態模擬。
3.1.4 控制功能模塊
控制功能模塊主要實現對來自外部仿真主控機控制命令的響應:1)接收來自仿真主控計算機的啟動、停止、跳時及斷點保存等命令后,執行相應操作,并回復應答信息;2)接收到相應的故障模擬狀態字后進行解析,并送補加故障模擬功能模塊實現相應故障模擬的模擬。
3.1.5 補加故障模擬功能模塊
補加故障模擬功能模塊主要實現對不同補加故障模式的模擬,根據控制功能模塊給出的故障狀態字信息,通過調用遙測模擬功能模塊實現對該故障現象的動態模擬。
研究發現,SDS作為陰離子型表面活性劑,具有崩解細胞膜,通過與膜蛋白疏水部分結合使其與膜分離,從而使蛋白質中一些非共價鍵受到破壞甚至改變蛋白質構象的特點。本研究通過提高mtDNA提取時SDS的濃度和水浴溫度,同時加入醋酸鉀除去多余SDS,從而獲得了濃度大、質量高的大豆mtDNA,適用于分子生物學實驗和高通量測序等后續研究。
3.1.6 補加信息交互功能模塊
補加信息交互功能模塊主要實現兩個補加仿真計算機間互傳數據的動態模擬,主要為補加階段字信息、補加到位信息、補加故障狀態信息、補加管路壓力等比較重要的狀態信息。每個信息交互周期到來時,由補加信息交互功能模塊從遙測功能模塊中讀取互傳遙測參數的當前狀態,并對信息交互數據幀中的內容進行更新,然后發送給網絡通信功能模塊組成網絡報文數據后發送給另一個補加仿真計算機;當接收到信息交互數據時,對數據內容進行判斷,若需進行處置,則調用遙測功能模塊模擬相關遙測參數的變化。
3.1.7 數據庫功能模塊
數據庫功能模塊主要負責實現對補加指令、注入數據、遙測參數,以及故障模式進行存儲及查詢等功能,指令及注入解析功能模塊、遙測模擬功能模塊基于數據庫實現指令的解析、遙測參數的模擬及故障現象的模擬。
3.2 編程方法
編程過程中采用循環采集處理與中斷觸發相結合的方法,同時程序中廣泛采用模塊化及C#類的構造函數的編程思想,提高程序的通用性和復用性,提高編程效率,減少重復性,并對補加的關鍵狀態信息,采用標志位方式提高程序的可靠性。飛控補加模擬器軟件主程序流程如圖4所示。

圖4 軟件主程序流程圖
系統首先進行程序初始化設置,包括以太網接口初始化、人機操作界面窗體控件的初始化、程序中狀態變量的初始化、補加遙測參數初值設置及定時器的初始化等,其中網絡IP地址、端口號及補加遙測參數等變量,由于需初始化變量數較多,采用了專門的數據文件對其初值進行賦值,并在初始化時由程序讀入數據文件實現對這些變量的初始化設置。

表1 指令、注入數據及遙測參數對應數據庫格式

表2 故障描述文件格式
初始化完成后,程序中開啟定時器開始計時,并打開UDP網絡端口監聽功能,同時程序根據定時器計時的時間對溫度、壓力等參數進行實時仿真計算。當定時器計時時間達到預定值時,由程序根據補加遙測參數的當前狀態分別組成補加數管遙測參數包和信息交互數據包,組包完成后組成網絡報文數據包格式分別發送給數管仿真計算機和另一補加仿真計算機,然后定時器從零重新計時,實現遙測數據的循環輸出。
采用網絡端口監聽功能實現對指令數據、控制命令及信息交互數據等的接收,從而減少對計算機資源的占用,當系統接收到來自其他仿真計算機的IP數據包后,首先判斷其目標端口是否為自己的端口號,若是則進入中斷程序對數據包內容進行解析處理,判斷為哪個處理分支。若為指令數據包,則按預定值更改相應的遙測參數值;若為控制命令數據包,則按命令要求執行相應的動作;若為信息交互數據,則先對數據進行緩存,然后進判斷是否滿足觸發條件,并執行相應操作,如若表征補加到位,則模擬相應閥門開關狀態的變化 ;若為補加故障模擬數據,則根據數據內容查詢數據庫,調用相應的遙測參數值,實現故障的模擬。
4 主要技術難點及措施
4.1 指令實時響應及遙測動態刷新
由于推進補加所需的指令、注入數據及遙測參數較多,達到上千的規模,且一般每條指令對應多個遙測參數,若完全通過代碼對指令進行解析及逐個對遙測參數進行模擬,會導致程序代碼量巨大,程序可讀性及可修改性變差,且不利于程序后續的維護升級[5-6]。基于該問題,采用數據庫方式對補加指令、注入數據及遙測參數進行存儲和查詢,在數據庫中對每條指令或注入數據的編碼、對應的遙測參數代號、對遙測參數的模擬方式、遙測參數值、遙測參數的轉換公式、遙測參數在下行遙測數據包中的通道號,以及遙測參數是否為復幀數據等進行定義,具體格式如表1所示。指令及注入解析功能模塊、遙測模擬功能模塊對數據庫進行訪問,根據指令或注入數據的編碼信息查找其對應哪些遙測參數,并讀取這些遙測參數的數值、通道及復幀等信息,根據這些信息實現遙測參數變化的模擬。
4.2 補加參數模擬
推進劑在軌補加過程中,補加管路、氣瓶及貯箱的溫度、壓力參數,推進劑貯箱的剩余量參數,以及壓氣機的轉速等參數,為補加過程中需重點監視的狀態參數,同時這些參數為緩變類型數據,且主要隨時間緩慢變化,同時地面試驗積累了大量相關的數據,可以建立相應的數學模型。為盡可能真實的模擬這些參數的在軌實際工作狀態,對地面補加試驗中獲得的數據進行整理、分析及統計,建立每類參數的數學模型[7],由遙測模擬功能模塊基于各類參數的數學模型實現對這些參數實時的動態模擬。
4.3 補加故障模擬
推進劑在軌補加對應的故障模式較多,且每個故障模式內部又有多重分支,為實現對補加各類故障現象的模擬,采用數據庫查詢方式,將各故障模式按照順序進行排列并給予唯一的ID號,每一個ID號對應一個故障描述文件,文件格式如表2所示。遙測模擬功能模塊接收到來自故障模擬功能模塊的故障ID號后,從數據庫中提取該ID號所對應的故障數據,根據故障描述文件內容對故障源相關的遙測參數進行設置,實現補加故障現象的模擬。
5 結論
推進劑補加飛控模擬器充分利用現代計算機技術、系統仿真技術和面向對象編程技術,完成了補加指令及注入數據的正確響應、遙測功能的動態仿真、補加故障模式的仿真及兩航天器間補加數據交互的動態仿真,具有真實性高、通用性高、靈活性高的特點,該模擬器在我國首次推進劑補加任務準備中得到了充分的應用,有效地驗證了推進劑補加飛控實施方案的有效性和完備性,取得了較好的效果。
[1] 江銘偉.俄羅斯空間站推進劑補加程序分析[J].火箭推進,2013,39(4):8-12.
[2]郭 堅 張 猛 趙 蕾.一種用于航天器飛控演練的數管模擬器設計[J].航天器工程,2011,20(2):35-40.
[3]鄭愛武 周建平 麻永平.嫦娥一號衛星飛行控制模擬器的設計與研制[J].北京航空航天大學學報,2013,39(1):57-61.
[4]張 啟 陳 欣.一種基于工控機的飛控系統模擬器[J].工業控制計算機,2005,18(3):33-37.
[5]孫瑞志.支持工作流動態變化的過程元模型[J].軟件學報,2003,18(11):62-67.
[6]王文義.基于并行程序效率和通用性的實踐與研究[J].計算機科學,2009,19(6):290-293.
[7]廖 瑛,龔明方,尹嘉娃,等.空間補加過程的建模與仿真研究[J].系統仿真學報,2010,22(6):1535-1538.
Design of a Kind of Propellant Refueling Simulator Used in Spacecraft Flight Control
Cheng Wei,Liang Ke
(Institute of Manned Space System Engineering,China Academy of Space Technology, Beijing 100094,China)
propellant refueling simulator for flight control is a simulation system used to validate the flight program and ground control schemes,to train mission operators,constructing a realistic mission environment for system testing in the flight control center. A design of flight control simulator used in the preparation of propellant refueling mission is put forward, the system structure and principle are introduced in detail, the system information flows and the soft design are showed, the technical difficulties and the solutions are illuminated at last. this design brings the simulator high comparability, high universality and high agility, and can simulate the propellant refueling process dynamically, it has been applied to the preparation of the first propellant refueling mission in our country, and good results have been achieved.
spacecraft; propellant refueling; flight control; simulator
2017-05-08;
2017-06-04。
程 偉(1986-),男,河南人,碩士研究生,主要從事載人航天器信息系統方向的研究。
1671-4598(2017)12-0166-04
10.16526/j.cnki.11-4762/tp.2017.12.043
TP273
A
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:34
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
消費導刊(2017年20期)2018-01-03 06:26:40
軟件導刊(2016年9期)2016-11-07 21:35:42
通信電源技術(2016年5期)2016-03-22 01:09:49
石油知識(2016年2期)2016-02-28 16:20:16
自動化儀表(2015年11期)2015-04-01 01:02:40
