模糊神經(jīng)網(wǎng)絡(luò)在煉鋼加熱爐溫度控制中的應(yīng)用
2018-01-05 02:09:23范子榮
范子榮
(山西大同大學(xué)機(jī)電工程學(xué)院,山西大同037003)
模糊神經(jīng)網(wǎng)絡(luò)在煉鋼加熱爐溫度控制中的應(yīng)用
范子榮
(山西大同大學(xué)機(jī)電工程學(xué)院,山西大同037003)
針對(duì)煉鋼過程中的加熱爐具有非線性、大滯后和建立精確數(shù)學(xué)模型有一定難度等特點(diǎn),采用常規(guī)PID控制效果不是很好,設(shè)計(jì)了一種模糊神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)控制器,該控制器將離線訓(xùn)練和在線自學(xué)習(xí)結(jié)合起來。MATLAB仿真表明,模糊神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)控制器與PID控制相比較,改善了系統(tǒng)的動(dòng)態(tài)性能,取得了良好的控制效果,達(dá)到了節(jié)能和環(huán)保的目的。
模糊神經(jīng)網(wǎng)絡(luò);自學(xué)習(xí);爐溫控制
在鋼料的熱處理過程中,加熱爐是一個(gè)重要的環(huán)節(jié),通過對(duì)加熱爐煤氣流量的合理控制來正確地調(diào)節(jié)爐內(nèi)溫度。由于加熱爐具有嚴(yán)重的非線性、時(shí)變以及種類繁多的干擾,傳統(tǒng)的控制方法[1-5](如PID控制)難以取得良好的控制效果。模糊控制近年來取得了很大的發(fā)展,其不需要建立被控對(duì)象的精確數(shù)學(xué)模型,被廣泛地應(yīng)用到各個(gè)領(lǐng)域。但是模糊控制需要專家經(jīng)驗(yàn)和知識(shí),然而人們很難根據(jù)經(jīng)驗(yàn)正確選取模糊規(guī)則和隸屬度函數(shù),從而造成模糊規(guī)則的不完善,影響了模糊控制的效果。神經(jīng)網(wǎng)絡(luò)是高度非線性動(dòng)力學(xué)系統(tǒng),具有自適應(yīng)、自組織、自學(xué)習(xí)、并行處理數(shù)據(jù)的能力。因此,可以將二者結(jié)合起來,利用兩者的優(yōu)點(diǎn),使模糊控制具有高度智能化。
本文充分利用模糊控制和神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn),設(shè)計(jì)了一個(gè)自學(xué)習(xí)模糊神經(jīng)網(wǎng)絡(luò)控制器,并將其應(yīng)用到煉鋼加熱爐溫度控制系統(tǒng),從而使控制系統(tǒng)具有高度智能化的性能,通過MATLAB仿真分析,說明了該方法的合理性和有效性。
1 模糊神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)控制器的設(shè)計(jì)[6]
模糊神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)控制FNC(Fuzzy Neural Control)系統(tǒng),見圖1。比例因子如Ke、Kc,放大因子如Ku,控制系統(tǒng)輸入值是R,控制系統(tǒng)輸出值是Y,F(xiàn)NC的輸入值是X1和X2,F(xiàn)NC的輸出值是U。
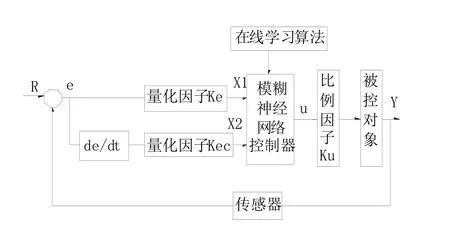
圖1 控制系統(tǒng)結(jié)構(gòu)
1.1 FNC的結(jié)構(gòu)設(shè)計(jì)及離線自學(xué)習(xí)算法
FNC結(jié)構(gòu)模型含有兩個(gè)輸入x1和x2,一個(gè)輸出u,見圖2。模糊子空間分成7個(gè)子集{PB,PM,PS,ZO,NS,NM,NB}={正大,正中,正小,零,負(fù)小,負(fù)中,負(fù)大},結(jié)構(gòu)為2-7-7-1,即一個(gè)輸入層、兩個(gè)隱層和一個(gè)輸出層的節(jié)點(diǎn)分別是2-7-7-1。
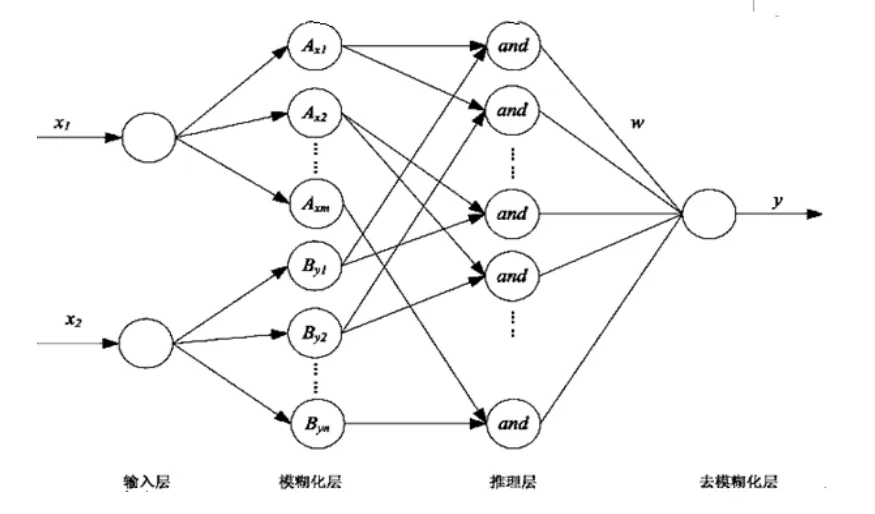
圖2 FNC結(jié)構(gòu)模型
FNC的輸入、輸出值之間的關(guān)系式為:
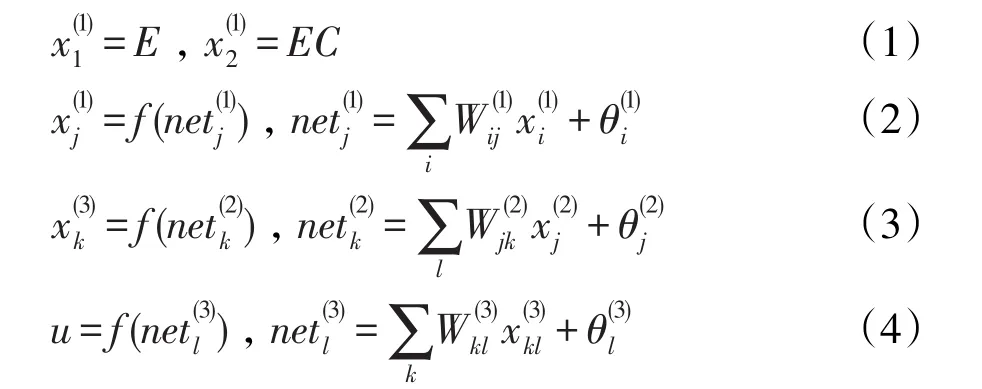
式中,從第(L-1)層到L層的連接權(quán)值可用W(L)表示,第L層的第i個(gè)神經(jīng)元的輸出用表示,第L層第j個(gè)節(jié)點(diǎn)的閾值可用表示,L=1,2,3,。
下面定義誤差的傳遞函數(shù)為:

其中,F(xiàn)NC的期望輸出用ud表示,F(xiàn)NC的實(shí)際輸出用u表示。
為使誤差傳遞函數(shù)最小,選取網(wǎng)絡(luò)權(quán)值W(L),即:
其中,L=1,2,3,η(t)是自適應(yīng)學(xué)習(xí)率,α為動(dòng)量因子。
假設(shè)第L層網(wǎng)絡(luò)權(quán)值的學(xué)習(xí)率為η(l)(t),通過調(diào)節(jié)權(quán)值W(L)(t)來調(diào)節(jié)η(l)(t)。
可見W(L)僅與η(L)有關(guān),所以可得權(quán)值的學(xué)習(xí)算法為:

對(duì)(9)式兩邊求偏導(dǎo)可得:
假定η(L)變化較慢,那么

可得式(10)變成為


于是,式(11)可變成為:

所以,可得自適應(yīng)優(yōu)化學(xué)習(xí)率η(L)的調(diào)整式為:
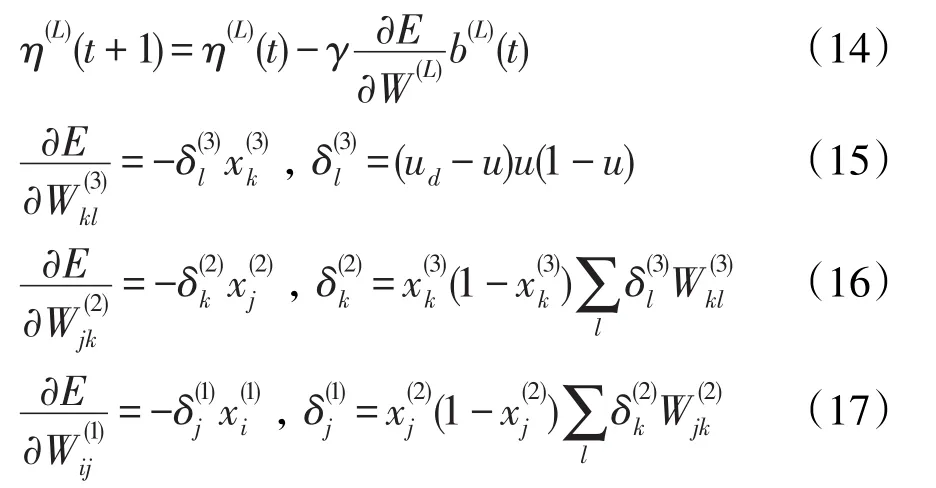
式中,γ是一個(gè)很小的常數(shù)。
下面將輸入變量x1和x2、輸出變量u的訓(xùn)練樣本集歸一化在[0,1]。
X映射:將模糊控制表中的論域[-6,6]映射到[0,1],即:

U映射:將FNC網(wǎng)絡(luò)輸出u從[0,1]變換到[-6,6]之間,即:

按照上述式子對(duì)FNC進(jìn)行離線訓(xùn)練,使FNC記憶49條模糊控制規(guī)則。
1.2 FNC的在線自學(xué)習(xí)算法
經(jīng)過以上的離線訓(xùn)練,F(xiàn)NC還可進(jìn)行在線自我調(diào)節(jié),當(dāng)被控對(duì)象發(fā)生變化時(shí),可通過在線修改FNC的權(quán)值來自適應(yīng)地跟蹤系統(tǒng)給定的輸入信號(hào)。
首先定義性能指標(biāo)函數(shù)為:

其中,R為給定值,Y為實(shí)際輸出值。
在線調(diào)整FNC權(quán)值的公式為:

同理,可得在線調(diào)整Ke、Kc、Ku的表達(dá)式分別為:
2 仿真研究
加熱爐的數(shù)學(xué)模型可用一階系統(tǒng)純滯后環(huán)節(jié)表示。數(shù)學(xué)模型有三個(gè)參數(shù):被控對(duì)象的時(shí)間常數(shù)T=200,純滯后時(shí)間為τ=10,靜態(tài)增益為K=4,可得其數(shù)學(xué)模型為:

當(dāng)輸入信號(hào)為單位階躍函數(shù),用MATAB來分析傳統(tǒng)的PID控制和FNC的響應(yīng)曲線,見圖3。
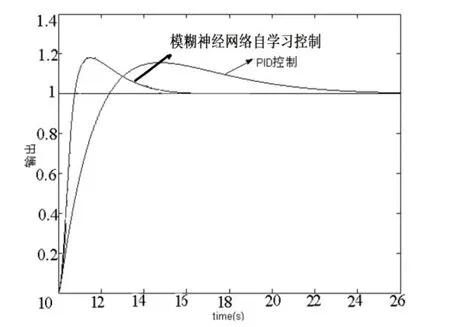
圖3 階躍響應(yīng)曲線比較
通過比較可以看出,常規(guī)PID控制由于比例、微分和積分常數(shù)相互制約,無法達(dá)到最優(yōu)組合,雖然響應(yīng)較快,但是超調(diào)量較大,調(diào)節(jié)時(shí)間長。模糊神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)控制由于自身具有自學(xué)習(xí)、自組織和自適應(yīng)能力,所以無論是動(dòng)態(tài)性能還是穩(wěn)態(tài)性能都能得到很好的控制,并且穩(wěn)態(tài)誤差很小,可以準(zhǔn)確地跟蹤參考模型的輸出,并且控制效果優(yōu)于常規(guī)的PID控制。
3 結(jié)語
針對(duì)鋼廠加熱爐的溫度控制問題,充分利用模糊控制與神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn),提出了一種模糊神經(jīng)網(wǎng)絡(luò)控制技術(shù),提高了控制系統(tǒng)的智能化程度,取得了良好的控制效果。
[1]杜云,吳學(xué)禮,孟華,等.自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)在爐溫控制中的應(yīng)用[J].儀器儀表學(xué)報(bào),2002,23(z1):446-448,454.
[2]Cheong F,Lai R.Constraining the optimization of a fuzzy logic controller using an enhanced genetic algorithm[J].IEEE Transaction on System,Man and Cybern-etics,2000,30(1):31-46.
[3]Horikawa S I,Furuhashi T,Uchikawa Y.On fuzzy modeling using fuzzy neural networks with the back-propagation algorithm[J].IEEE Transaction on Neural Networks,1992,3(5):801-806.
[4]薛福珍,唐琰.基于GA的模糊神經(jīng)網(wǎng)絡(luò)控制器的設(shè)計(jì)與仿真[J].系統(tǒng)仿真學(xué)報(bào),2001,13(5):573-575.
[5]趙利.基于模糊模型的專家系統(tǒng)推理方法[D].杭州:浙江大學(xué),2013.
[6]王耀南,孫煒.智能控制理論及應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2008.
Application of Fuzzy Neural Network in Steelmaking Heater Temperature Control
FAN Zi-rong
(School of Mechanical and Electrical Engineering,Shanxi Datong University,Datong Shanxi,037003)
Based on steelmaking heater with nonlinear,large lagging and inability to establish accurate mathematical model,the traditional PID control is difficult to achieve the ideal control effect.A fuzzy neural network self-learning controller is designed.The controller combines the off-line training with on-line self-learning.Firstly,neural network parameters are trained off-line.Then the further online learning is performed.MATLAB simulation shows that the fuzzy neural network self-learning controller improves the dynamic and stable performance compared with PID control.The good control effect is achieved.The energy saving and environmental protection are got.
fuzzy neural network;self-learning;heater temperature control
TP13
A
1674-0874(2017)06-0066-03
2017-03-06
山西省自然科學(xué)基金資助項(xiàng)目[2015011065]
范子榮(1979-),女,山西陽高人,碩士,講師,研究方向:控制理論與控制工程。
〔責(zé)任編輯 王東〕