基于模糊控制技術的馬鈴薯儲藏環境智能監控系統設計
2018-01-06 16:39:53楊國威王福平
江蘇農業科學 2017年22期
關鍵詞:單片機
楊國威+王福平

摘要: 針對馬鈴薯在儲藏過程中對環境的要求,在充分研究影響馬鈴薯儲藏因素的基礎上,分析馬鈴薯不同儲藏階段的環境參數要求,提出以模糊控制技術為核心的溫度、濕度、二氧化碳濃度采集控制系統。儲藏庫中的單片機將傳感器采集的環境參數數據通過通用分組無線服務(GPRS)模塊傳輸到服務器數據庫,將馬鈴薯儲藏階段的環境要求和模糊控制技術結合,系統對單片機發出指令,通過控制繼電器來控制環境調節設備,以達到最佳儲藏環境的要求。結果表明,該系統能夠準確地控制馬鈴薯儲藏環境參數的變化,保證馬鈴薯處于最佳儲藏環境。
關鍵詞: 馬鈴薯;單片機;模糊控制;GPRS;儲藏環境;智能監控
中圖分類號: TP273+.5 文獻標志碼: A
文章編號:1002-1302(2017)22-0244-03
西北地區為干旱、半干旱氣候,光照強,晝夜溫差大,氣候冷涼,適合馬鈴薯種植,其種植面積廣闊。隨著我國馬鈴薯主糧化戰略的啟動,進一步推動了馬鈴薯產業的發展。人們對馬鈴薯營養價值的認知度有所提高,結合馬鈴薯加工技術的發展,對馬鈴薯的需求量越來越大,種植面積也在不斷增長。目前,新疆、甘肅、寧夏、內蒙古等地區的馬鈴薯加工企業已有一定的規模,分別分布在產業的原料生產、粗加工、深加工等領域[1],但是,與發達國家相比,我國馬鈴薯產業的發展水平總體落后,經濟效益沒有完全發揮出來[2]。在馬鈴薯儲藏方面,我國目前的儲藏方式相對落后。以寧夏地區為例,儲藏庫基本依賴于自然環境,人為干預因素較少。
為了使整個馬鈴薯儲藏庫各個角落的溫度、濕度控制在最佳值,必須先獲取準確的環境參數[3]。本試驗針對寧夏地區南部山區馬鈴薯的大面積種植和大量儲藏,設計了1套集監測、決策和控制為一體的馬鈴薯儲藏庫環境智能監控系統。根據每個儲藏庫不同的建筑結構和建筑面積,采用不同數量的采集節點設計,節點之間通過485通信方式組成一個合理的信息采集網絡。同時建立1套模糊控制系統,以達到對馬鈴薯儲藏環境參數的有效控制,提高馬鈴薯儲藏的經濟效益。
1 系統方案設計
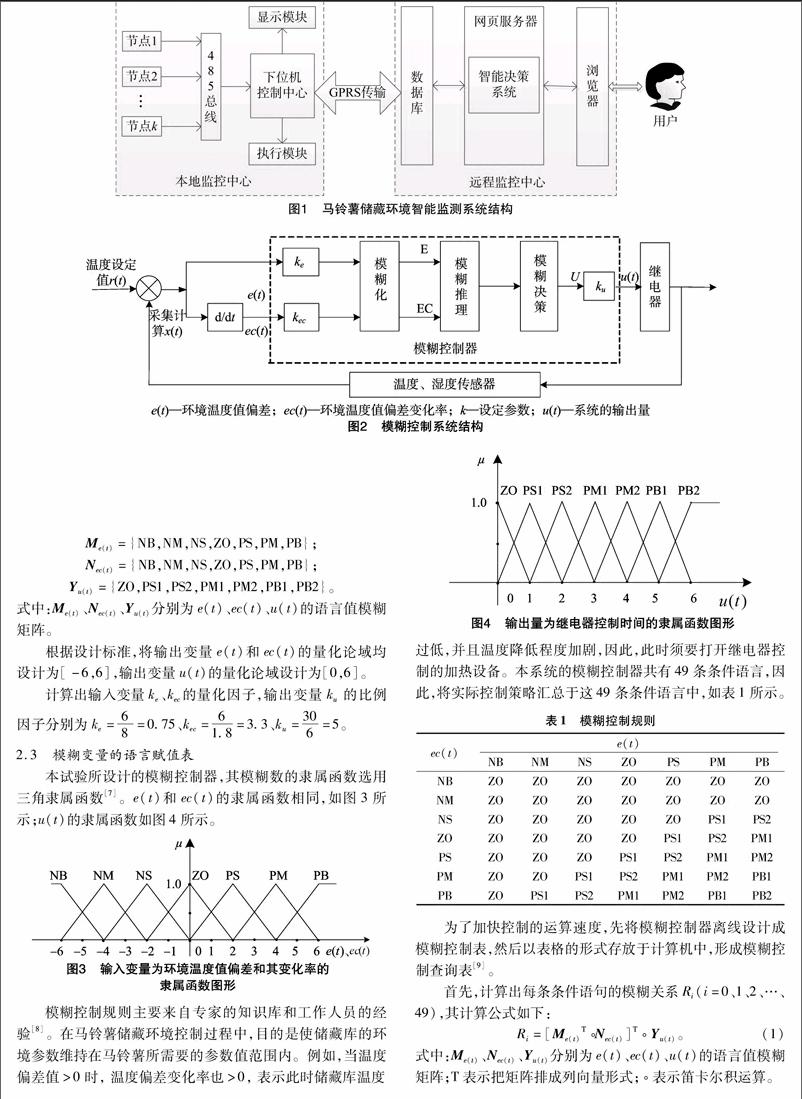
如圖1所示,馬鈴薯儲藏環境遠程監測系統由節點傳感器模塊、下位機控制中心、顯示模塊、執行模塊和遠程監控中心等組成。
根據馬鈴薯儲藏庫結構和面積的不同,須要部署的傳感器節點數量不同[4],利用485總線技術,可以為節點數量的增加和減少提供較大的方便[5]。節點傳感器采集到的信息通過485總線傳輸到下位機控制中心,經過單片機處理之后,環境參數信息一方面進行顯示,另一方面將數據通過數據傳輸單元(DTU)中的通用分組無線服務(GPRS)模塊傳送至計算機中的數據庫,GPRS模塊與計算機通過網絡連接,利用傳輸控制協議(TCP)進行通信。遠程監控中心通過調用數據庫中的信息,利用模糊控制技術分析判斷,計算出每種設備的工作時間,并將設備的工作時間存儲至數據庫中,同時將控制信號通過GPRS發送至下位機,下位機對執行模塊下達控制命令。用戶可以通過登錄瀏覽器查看實時采集和上傳的環境參數信息和控制信息。
2 智能控制器設計
馬鈴薯儲藏可分為入庫階段、儲藏階段和出庫階段,每個階段的環境參數需求各不相同。本試驗就馬鈴薯儲藏休眠階段的溫度參數需求,對模糊控制規則表的設計進行詳細說明,其他階段設計方法均一致。
2.1 模糊控制器的設計
如圖2所示,本試驗設計的模糊控制器是一個雙輸入-單輸出二維溫度參數調節模糊控制器。該模糊控制系統能根據設定的溫度參數,通過對輸入量的模糊化,并利用知識庫和專家經驗進行模糊推理設計控制規則,最后對輸出量進行反模糊化,從而控制繼電器的開關,實現對溫度設備的控制。
2.2 模糊控制器參數確定
在馬鈴薯儲藏階段,以環境溫度作為控制臨界點,輸入變量為環境溫度值偏差e(t),變化率為ec(t),輸出量為繼電器控制時間u(t),采樣周期為20 min。吳曉玲等的研究表明,0~4 ℃短期貯藏時,馬鈴薯蛋白質的含量最高,適合鮮食馬鈴薯的貯藏[6]。設置偏差e(t)的基本論域為[-4,4],經過幾個采樣周期的測定,溫度值偏差變化率ec(t)的論域為[-1.8,1.8]。通過試驗,結合現有設備, 當溫度從偏差值上
升到正常值,所需時間約為30 min,故系統的輸出量u(t)的論域為[0,40]。本系統設計的模糊控制器2個輸入變量的語言值的個數均為7個,輸出變量的語言值的個數也為7個,如下所示:
3 試驗分析
3.1 仿真試驗
利用MATLAB軟件進行仿真試驗,得到系統輸出量的曲面圖。如圖5所示,曲面圖中每個坐標軸分別表示1個模糊變量,模糊變量論域由坐標軸的范圍表示。將輸出變量的曲面圖與模糊控制查詢表進行比對,更有利于模糊控制表設計的合理化[10]。
對于系統的響應穩定時間,利用MATLAB軟件對整個系
統進行仿真試驗[11]。由圖6可知,該系統約在35 s時,系統表征量M輸出值趨于穩定,可見系統的穩定響應時間大約在系統開始運行35 s之后,可以較好地對其進行控制。
3.2 控制試驗
該系統是針對馬鈴薯儲藏階段設計的模糊控制器,根據分析將其參數標準值設置為3,差值論域上限為4,差值論域下限為-4,差值變化率上限為1.8,差值變化率下限為-1.8,量化因子ke為0.75,量化因子kec為3.3,比例因子ku為5,采樣周期為20 min。
控制決策信息顯示界面如圖7所示,圖中顯示的為2015年4月20日09:00—16:00的決策信息,通過該界面可以查看系統決策出的控制時長,每個采樣周期決策1次。
系統默認的第1次采集的環境溫度值為9.82 ℃,系統從09:00開始運行,此時便開始第2次環境溫度信息采集,通過這2個數據進行決策,此時系統得出的決策信息精確性比較差,執行模塊對第1次決策信息不進行操作,因此系統實際控制繼電器是從第2次決策開始。endprint
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36