一種改進的位置指紋定位算法
2018-01-08 05:15:56孔港港
導航定位學報 2017年4期
關鍵詞:卡爾曼濾波
吳 雨,楊 力,孔港港
(信息工程大學 導航與空天目標工程學院,鄭州 450001)
一種改進的位置指紋定位算法
吳 雨,楊 力,孔港港
(信息工程大學 導航與空天目標工程學院,鄭州 450001)
針對位置指紋法在指紋數據采集階段和目標跟蹤定位階段無法較好地濾除噪聲干擾,嚴重影響定位精度的問題,對位置指紋定位算法進行改進:利用卡爾曼濾波算法對指紋采集時的數據進行濾波處理,對在線定位時的估算坐標進行優化,以期提高定位結果的穩定性與準確性。實驗結果表明改進后的算法較傳統算法有更高的定位精度和穩定性。
位置指紋法;室內定位;卡爾曼濾波;噪聲濾除
0 引言
目前已有的室內定位技術包括紅外線定位、藍牙定位、無線保真(wireless fidelity,WiFi)定位、超寬帶定位、射頻識別定位等多種。WiFi由于具有信號覆蓋面積廣、成本低、傳輸速度高等優點,逐漸成為目前室內人員定位的主要方式之一。
WiFi定位雖然有很多優點和很大的發展前景,但WiFi信號的易漂移、易受多路徑干擾、環境適應性差等不足造成其定位精度差、定位結果可靠性低,限制了該定位技術的應用范圍。為了提高WiFi定位結果的精度,文獻[1]提出利用統計濾波對位置指紋定位數據進行濾噪處理。文獻[2]在位置指紋法的基礎上提出了一種將確定型算法和概率型算法相結合的定位方法,以解決定位算法的時間復雜度和空間復雜度的問題。文獻[3]提出一種基于稀疏表示的定位算法,以解決位置指紋算法中參數選擇和不能綜合利用全局參考點信息的問題。
本文研究利用卡爾曼濾波對位置指紋定位算法數據進行濾噪處理和最佳估值,建庫階段采用卡爾曼濾波對指紋數據進行濾噪處理,定位階段在位置指紋定位算法的基礎上采用卡爾曼濾波實時得到估計目標最佳位置,使得定位結果最大程度地接近真實軌跡。
1 算法分析
1.1 位置指紋算法
基于信號強度值的位置指紋定位算法[4-5]不依賴于信號傳播損耗與距離的關系,無需知道信號發射端的具體位置,其原理是將定位區域每一點處的信號強度映射到一個二維坐標中,建立定位區域的信號強度分布圖,而后將采集到的信號強度信息與地圖進行匹配得出最佳估值。主要可以分為2個階段:離線建庫階段和在線定位階段。位置指紋定位算法如圖1所示。

圖1 位置指紋定位算法
1)離線建庫階段。主要是建立待定位區域位置指紋信息和坐標信息的數據庫,以便定位時匹配。將待定位區域格網化,將格網點處掃描到的信號強度和該點坐標存入數據庫。由于掃描到的信號強度存在很大噪聲,因此入庫之前必須進行預處理消除或減弱噪聲的干擾,以提高指紋庫的可靠性和定位結果的準確性。前期數據庫的建立需要耗費大量的時間,因此指紋點采集的密集程度應該根據定位區域和實際需求確定。
(1)
式中:K為參考點個數;ω為權值,取歐式距離的倒數;(x,y)為定位節點坐標;(xj,yj)為參考節點坐標。
1.2 卡爾曼濾波算法
卡爾曼濾波算法[6-7]是由匈牙利裔美國數學家卡爾曼在20世紀60年代提出來的,是一種基于線性最小均方差預測和最優線性遞歸的濾波算法,它建立在馬爾科夫模型和線性代數的基礎上,能夠有效解決矢量估計和非平穩估計的問題,從噪聲環境下的不完全觀測量中推測出動態系統的狀態,從而提出一種最小均方誤差準則下獲得最優解的方法。
卡爾曼濾波的基本思想是利用信號和噪聲的狀態空間模型,通過前一時刻的估計值和當前時刻的觀測值對狀態變量的估計值進行更新,計算當前時刻的估計值,即利用觀測值不斷校正系統的狀態向量。
卡爾曼濾波法主要需要理解它的5個公式[8-10]。首先是根據上一時刻的最優估計值預測當前時刻的狀態為
X(k|k-1)=AX(k-1|k-1)+BU(k)。
(2)
式中:k為當前時刻;X(k|k-1)為根據上一時刻預測的當前狀態;X(k-1|k-1)為上一時刻的最優估值;U(k)為系統控制量;A、B為系統參數。
第二步則要更新X(k|k-1)的協方差為
P(k|k-1)=AP(k-1|k-1)AT+Q。
(3)
式中:P(k-1|k-1)是上一時刻最優估值的協方差;Q是服從正態分布的系統噪聲協方差陣。
第三步是計算卡爾曼增益為
Kg(k)=P(k|k-1)HT(HP(k|k-1)+R)-1。
(4)
式中:Kg(k)為當前時刻的卡爾曼增益;H為系統參數;R為觀測噪聲協方差陣。
第四步是更新當前狀態的最優估值為
X(k|k)=X(k|k-1)+Kg(k)
(z(k)-Hx(k|k-1))。
(5)
式中z(k)為當前時刻的觀測值。
最后一步則是更新當前時刻最優估值的協方差為
P(k|k)=(I-Kg(k)H)P(k|k-1)。
(6)
式中I為單位矩陣。
卡爾曼濾波的實質就是利用一系列觀測值不斷校正系統的狀態向量,通過觀測、預測、校正的順序進行遞歸,使得系統估計誤差的方差最小,從而得到最優解。
2 算法實現
2.1 指紋數據預處理
采集指紋數據時,為了提高指紋點信號強度的可靠性與穩定性,必須對數據進行多次掃描后預處理,常使用的預處理方式有均值濾波、高斯濾波、粒子濾波、卡爾曼濾波等多種,考慮到處理效果和算法實現的復雜程度,將信號強度噪聲均當作高斯白噪聲,選擇卡爾曼濾波對信號強度進行預處理。由于是單變量模型,狀態轉移矩陣和觀測矩陣為一階矩陣,狀態噪聲和觀測噪聲為一階向量,沒有控制變量。指紋采集時對信號多次掃描,多次掃描的信號強度理論上是相同的,而測量值與真實值也直接對應的;因此取狀態轉移矩陣和觀測矩陣中的值均為1,狀態方程和觀測方程為:
x(k)=x(k-1)+w(k-1);
(7)
z(k)=x(k)+v(k)。
(8)
式中w(k-1)和v(k)為系統噪聲和觀測噪聲。
預處理時對濾波公式中的部分參數進行取值,R和Q為一階陣,陣中數值分別取經驗值0.004和0.25,初始值x(0)為0,P(0)為10,簡化后的濾波公式為:
X(k|k-1)=X(k-1|k-1);
(9)
P(k|k-1)=P(k-1|k-1F)+0.25;
(10)

(11)
X(k|k)=X(k|k-1)+Kg(k)
(z(k)-x(k|k-1));
(12)
P(k|k)=(1-Kg(k))P(k|k-1)。
(13)
利用卡爾曼濾波處理掃描后的信號強度效果如圖2所示。
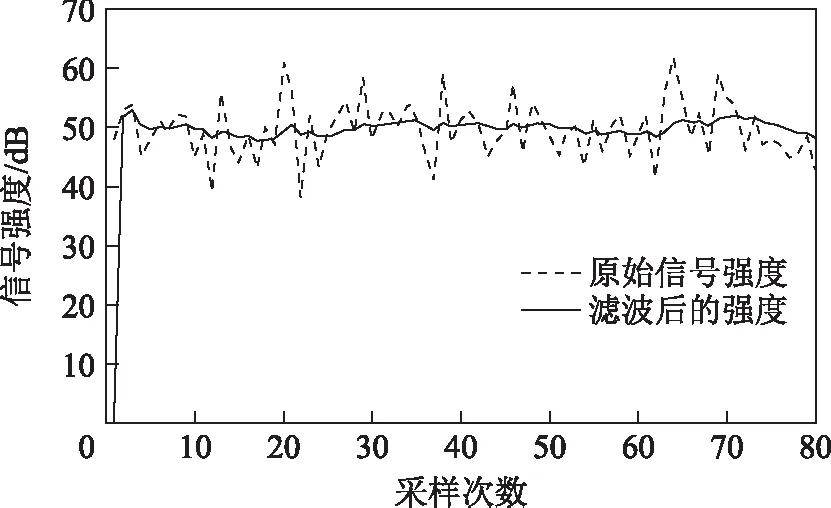
圖2 信號預處理
圖中淺色曲線代表未處理的掃描到的數據,可以看出信號漂移較為嚴重,最大可達15 dB,嚴重影響定位精度;深色曲線為卡爾曼濾波處理后的結果。可以看出卡爾曼濾波能夠很好地處理掃描到的接收信號強度指示(received signal strength indication,RSSI)值,保證RSSI值接近實際值。濾波前后數據概率分布如圖3所示。
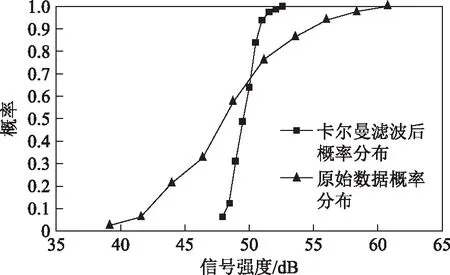
圖3 信號強度概率分布
2.2 目標定位與跟蹤
數據庫建立完成后,在線定位時卡爾曼濾波實時定位目標。由于室內速度一般較慢、定位間隔較短,2次定位間的速度可認為是勻速的,將速度沿x和y軸方向分解,則當前時刻目標狀態向量可表示為
x(k)=[xT(k),yT(k),vx(k),vy(k)]。
(14)
式中:xT(k),yT(k)為目標當前時刻的位置;vx(k),vy(k)為當前時刻目標在x和y方向上的速度投影。
觀測方程為
(15)
式中:z(k)為當前時刻的觀測值;xz(k)和yz(k)為當前時刻觀測到的目標的坐標。
則目標的狀態方程和觀測方程可表示為:
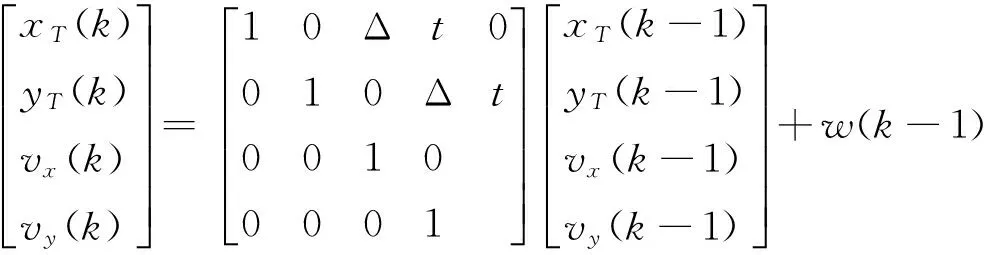
(16)
(17)
式中Δt為定位間隔,本文定位間隔為1 s。
然后根據卡爾曼濾波的5個公式對定位結果進行處理,將K鄰近法求得的當前時刻的坐標作為觀測值,根據驗證,觀測噪聲協方差R取0.05,系統噪聲協方差Q取0.01效果較好;由于初始時刻的坐標值和狀態變量的協方差對于后續的結果影響較小,可取任意值。本文設置協方差矩陣和初始值為

(18)
式中:x(0)是初始時刻的位置坐標和速度分量;p(0)是初始時刻狀態變量的協方差陣;W為狀態噪聲協方差矩陣;V為觀測噪聲協方差矩陣。
最后得到卡爾曼濾波的最佳估值作為當前時刻的最終位置。
3 實驗與結果分析
為了驗證算法的定位效果,選取了某實驗樓第4層進行實驗。該區域長45 m、寬21 m,共有9個房間,實驗區域平面圖如圖4所示。在該區域共布設了6個無線路由器,路由器布設位置如圖4上黑點所示。以405房間左上角為坐標原點,向下為y軸正方向,向右為x軸正方向。在該區域,以3.6 m為間隔采樣,一共采集了60個指紋點。實驗時,手持智能終端設備從405房間(2.4,3.6)點沿著走廊走進412房間(23.4,18)處進行跟蹤定位,定位間隔為1 s,行走路徑如圖4直線所示。將本算法實驗定位結果的精度與單純的位置指紋定位結果進行對比,結果如圖5和表1所示。
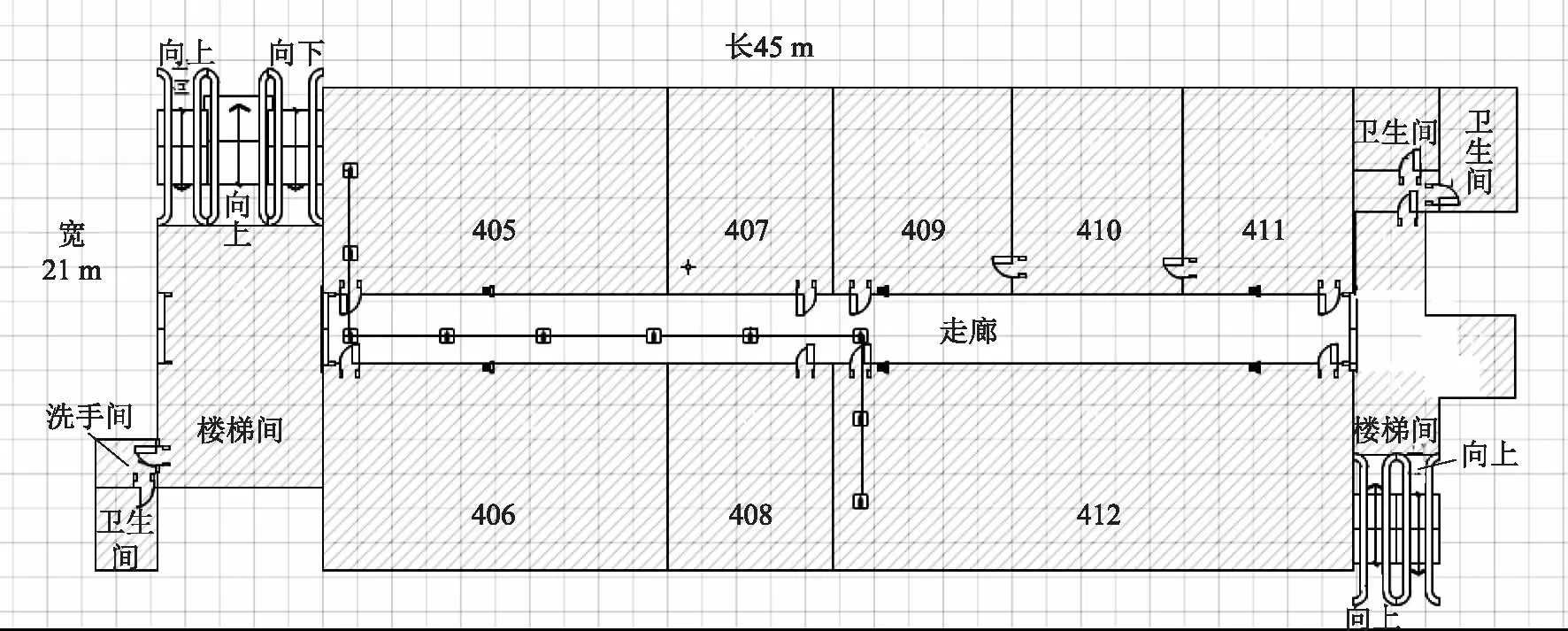
圖4 定位區域平面圖
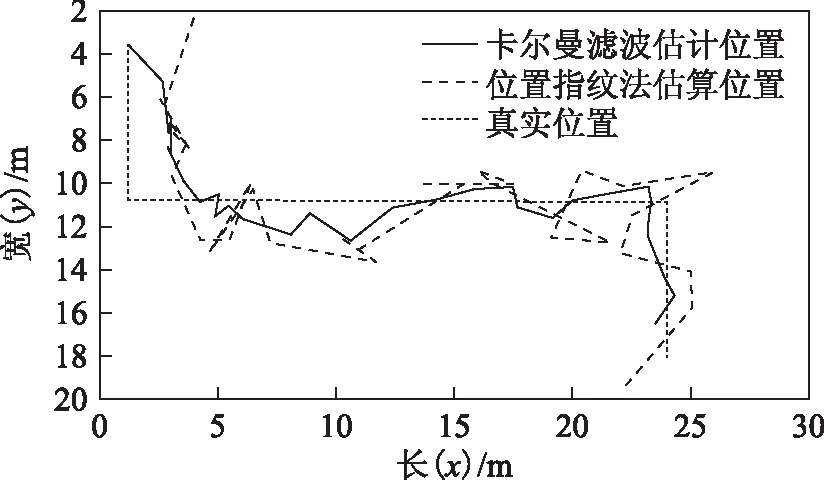
圖5 行跡對比
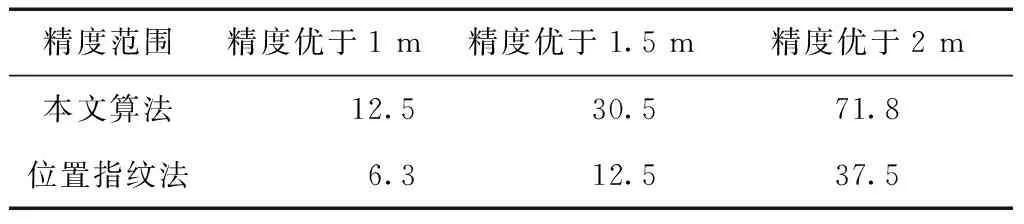
(%)
從表可知:位置指紋定位算法的平均誤差為2.917 m,1 m以內的精度占6.3 %,1.5 m以內的精度占12.5 %;而本文基于卡爾曼濾波的位置指紋定位算法定位結果的平均誤差為1.903 m,定位精度相比位置指紋法平均提高1.014 m,其中12.5 %能夠保持在1 m以內的定位精度,30.5 %保持在1.5 m以內的定位精度,71.8 %都能保持在2 m以內的定位精度。定位誤差概率分布如圖6所示。
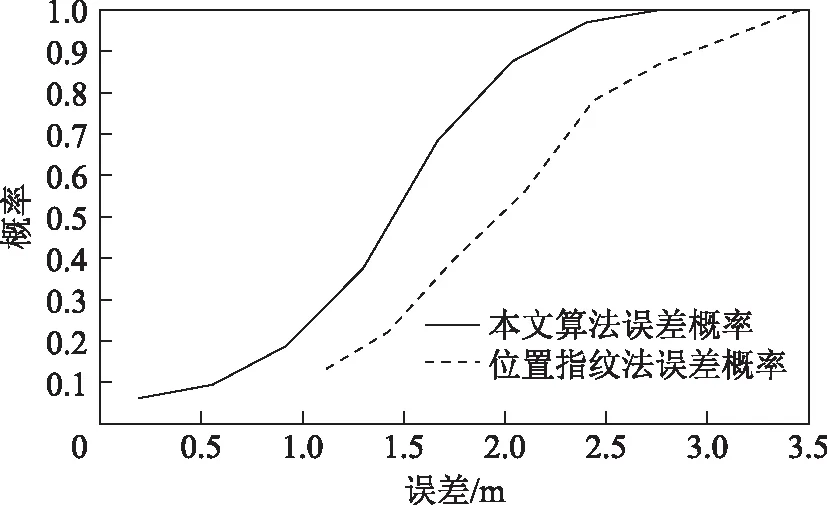
圖6 誤差概率分布
4 結束語
針對傳統位置指紋定位法定位結果的可靠性和準確性較低等問題,本文提出利用卡爾曼濾波對指紋數據進行預處理和對定位結果進行最佳估計,并介紹了位置指紋法的定位原理和卡爾曼濾波的算法實現。實驗結果表明本方法在一定程度上能夠提高定位結果的可靠性和精度,定位效果明顯優于位置指紋法,精度基本能夠穩定在2 m以內,具有可行性。
[1] 魏恒瑞,王蔚庭.基于WIFI定位技術的改進型位置指紋識別算法研究[J].制造業自動化,2014,36(12):148-151.
[2] 王忠民,陳振,潘春華.一種改進的位置指紋智能手機室內定位算法[J].西安郵電大學學報,2014,19(1):17-20.
[3] 曾偉,黃亮.一種基于稀疏表示的WLAN室內定位算法[J].計算機應用與軟件,2014,31(12):175-177.
[4] 容曉峰,楊娜.RSSI位置指紋的定位誤差分析與仿真[J].西安工業大學學報,2010,30(6):574-577.
[5] 陳永光,李修和.基于信號強度的室內定位技術[J].電子學報,2004,32(9):456-458.
[6] 張明華.基于WLAN的室內定位技術研究[D].上海:上海交通大學,2009:80-99.
[7] 肖如良,李奕諾,江少華.基于卡爾曼濾波與中位加權的定位算法[J].計算機應用,2014,34(12):3387-3390.
[8] BUCY R,KALMAN R,SELIN L.Comment on“the Kalman filter and nonlinear estimates of multivariate normal processes”[J].IEEE Transactions on Automatic Control,1965,10(1):118-119.
[9] 趙勇翔,周懷北,陳淼.卡爾曼濾波在室內定位系統實時跟蹤中的應用[J].武漢大學學報(理學版),2009,55(6):696-700.
[10] ANWAR A K,IOANNIS G,PAAVLIDOU F N.Indoor location tracking using AGPS and Kalman filter[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of Positioning,Navigation and Communication(WPNC)2009.[S.L.]:IEEE,2009:177-181.
Animprovedpositioningalgorithmoflocationfingerprint
WUYu,YANGLi,KONGGanggang
(College of Navigation and Aerospace Engineering,Information Engineering University,Zhengzhou 450001,China)
Aiming at the problem that it is difficult to effectively eliminate noises for location fingerprinting method in data collection and target tracking and positioning,which seriously impacts on the positioning accuracy,the paper proposed an improved method:the Kalman filtering algorithm was used to filter the collected fingerprints,the estimated positioning location was improved,in order to optimize the stability and veracity of positioning.Experimental result showed that the improved method would have higher positioning accuracy and stability.
location fingerprinting method;indoor positioning;Kalman filtering;noise removal
2017-02-17
吳雨(1990—),男,安徽淮北人,碩士研究生,研究方向為室內定位。
吳雨,楊力,孔港港.一種改進的位置指紋定位算法[J].導航定位學報,2017,5(4):16-20.(WU Yu,YANG Li,KONG Ganggang.An improved positioning algorithm of location fingerprint[J].Journal of Navigation and Positioning,2017,5(4):16-20.)
10.16547/j.cnki.10-1096.20170404.
P228.1
A
2095-4999(2017)04-0016-05
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
