BDS靜態(tài)精密單點(diǎn)定位算法分析
2018-01-08 05:23:10王趁香葛茂榮祝會(huì)忠馬天明
導(dǎo)航定位學(xué)報(bào) 2017年4期
關(guān)鍵詞:方向實(shí)驗(yàn)
王趁香,葛茂榮,祝會(huì)忠,馬天明,高 猛
(1.遼寧工程技術(shù)大學(xué) 測繪與地理科學(xué)學(xué)院,遼寧 阜新 123000;2.德國GFZ地學(xué)研究中心,德國Potsdam A1714473)
BDS靜態(tài)精密單點(diǎn)定位算法分析
王趁香1,葛茂榮2,祝會(huì)忠1,馬天明1,高 猛1
(1.遼寧工程技術(shù)大學(xué) 測繪與地理科學(xué)學(xué)院,遼寧 阜新 123000;2.德國GFZ地學(xué)研究中心,德國Potsdam A1714473)
為了提高BDS靜態(tài)精密單點(diǎn)定位算法的精度,提出與BDS靜態(tài)精密單點(diǎn)定位相關(guān)的數(shù)學(xué)模型、誤差處理方法以及對(duì)應(yīng)的參數(shù)估計(jì)策略:通過雙頻無電離層組合模型消除電離層延遲誤差一階項(xiàng);同時(shí)采用誤差改正模型對(duì)以對(duì)流層延遲為主的中性大氣延遲誤差、系統(tǒng)偏差和天線相位偏差等誤差進(jìn)行改正。實(shí)驗(yàn)結(jié)果表明:可見衛(wèi)星數(shù)和PDOP值對(duì)BDS靜態(tài)精密單點(diǎn)定位可產(chǎn)生一定的誤差影響,東(E)方向和北(N)方向誤差較天(U)方向小;雖然目前BDS跟蹤站數(shù)量有限以及BDS精密軌道和鐘差精度較GPS差,但是BDS靜態(tài)精密單點(diǎn)定位精度仍然能夠?qū)崿F(xiàn)dm至cm級(jí)定位。
BDS精密單點(diǎn)定位;數(shù)學(xué)模型;參數(shù)估計(jì)策略;雙頻無電離層組合模型;精度分析
0 引言
精密單點(diǎn)定位技術(shù)(precise point positioning,PPP)采用單臺(tái)全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)接收機(jī)、國際GNSS服務(wù)組織(International GNSS Service,IGS)給出的30 s精密星歷、30 s的精密鐘差產(chǎn)品以及載波相位觀測值來進(jìn)行高精度定位。文獻(xiàn)[1-8]研究了非差精密單點(diǎn)定位方法,處理長時(shí)間靜態(tài)觀測數(shù)據(jù)的結(jié)果精度達(dá)到cm級(jí)。文獻(xiàn)[9-12]使用在測碼偽距與測碼偽距觀測值間、載波相位與載波相位觀測值間分別形成雙頻消電離層組合的精密單點(diǎn)定位模型,獲得了cm級(jí)的定位精度。文獻(xiàn)[13]中提到經(jīng)過十多年的快速發(fā)展,精密單點(diǎn)定位技術(shù)已在高精度測量、低軌衛(wèi)星定軌、航空測量、地表變形監(jiān)測等領(lǐng)域取得了廣泛的應(yīng)用。文獻(xiàn)[14]介紹北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigation satellite system,BDS)是中國開發(fā)的全球衛(wèi)星導(dǎo)航系統(tǒng),包含6顆地球靜止軌道(geostationary Earth orbit,GEO)衛(wèi)星、5顆傾斜地球同步軌道(inclined Earth synchronous orbit,IGSO)衛(wèi)星和5顆中高度地球軌道(medium altitude Earth orbit,MEO)衛(wèi)星。目前BDS完全具備了區(qū)域?qū)Ш蕉ㄎ荒芰Γ鸩较騁NSS推進(jìn)。BDS空間系統(tǒng)采用2000國家大地坐標(biāo)系(China geodetic coordinate system 2000,CGCS2000),BDS時(shí)(BDS time,BDT)采用的秒長為原子時(shí)秒長。目前,BDS基本情況如表1所示。開展BDS PPP研究,縮短精密單點(diǎn)定位初始化時(shí)間將會(huì)進(jìn)一步完善GNSS PPP模型與算法;BDS高精度導(dǎo)航定位的發(fā)展與應(yīng)用為多衛(wèi)星導(dǎo)航系統(tǒng)組合定位解算奠定基礎(chǔ),具有重要的理論意義與實(shí)用價(jià)值。
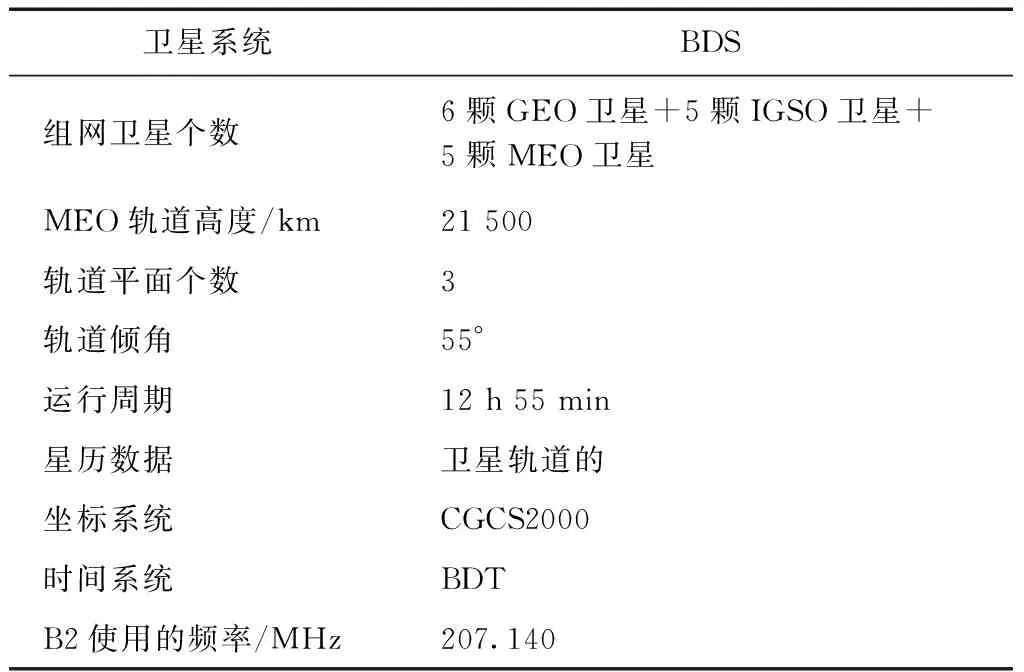
表1 BDS基本情況
1 BDS PPP的數(shù)學(xué)模型和參數(shù)估計(jì)策略
1.1 數(shù)學(xué)模型
BDS靜態(tài)精密單點(diǎn)定位的基本觀測方程采用雙頻無電離層組合以消除電離層一階項(xiàng)誤差的影響。BDS具有B1、B2、B3共3個(gè)信號(hào)頻率,本文采用B1、B2頻率上的相位和偽距觀測值進(jìn)行無電離層組合,其具體觀測方程為
(1)

1.2 參數(shù)估計(jì)及數(shù)據(jù)處理策略
BDS靜態(tài)精密單點(diǎn)定位需要計(jì)算的參數(shù)包括各個(gè)觀測站的坐標(biāo)、所有接收機(jī)的鐘差、系統(tǒng)的偏差和天頂對(duì)流層的延遲以及各個(gè)衛(wèi)星不間斷觀測時(shí)間段內(nèi)的模糊度等。實(shí)驗(yàn)采用的誤差處理方法會(huì)有與接收機(jī)有關(guān)的接收機(jī)鐘差,處理方法一般將接收機(jī)鐘差當(dāng)作一個(gè)未知參數(shù),且假設(shè)各歷元之間的接收機(jī)鐘差互相獨(dú)立,當(dāng)做是一種白噪聲并與測站位置、天頂對(duì)流層延遲等參數(shù)一起解算。與衛(wèi)星有關(guān)的衛(wèi)星鐘差則采用多項(xiàng)式內(nèi)插方法來獲得每歷元所對(duì)應(yīng)的衛(wèi)星鐘差。對(duì)于多路徑效應(yīng),用半?yún)?shù)法估計(jì)多路徑誤差以削弱其影響。文獻(xiàn)[15-16]中有關(guān)對(duì)流層延遲計(jì)算的干分量采用Saatamoinen模型,對(duì)流層延遲殘余采用隨機(jī)游走進(jìn)行模擬,天頂對(duì)流層延遲利用圖形建模框(graphical modeling framework,GMF)映射到傳播路徑上,其他一些誤差模型的時(shí)延問題同樣可以利用GMF克服。實(shí)驗(yàn)采用北斗衛(wèi)星觀測實(shí)驗(yàn)網(wǎng)(BeiDou experimental tracking stations,BETS)提供的采樣間隔為30 s的精密鐘差和軌道并用其來固定衛(wèi)星的軌道和鐘差,對(duì)于那些產(chǎn)生cm級(jí)以上的系統(tǒng)偏差,如相對(duì)論效應(yīng)、固體潮汐以及相位纏繞產(chǎn)生的誤差則可以利用模型來改進(jìn)。當(dāng)今還沒有機(jī)構(gòu)能夠給出關(guān)于BDS衛(wèi)星端和接收機(jī)端的精確天線相位中心偏移,同時(shí)其天線相位中心變化信息當(dāng)前也無法得到;但并不影響B(tài)DS區(qū)域?qū)Ш蕉ㄎ环?wù)的能力。BDS精密單點(diǎn)定位數(shù)據(jù)處理的方法如表2所示。
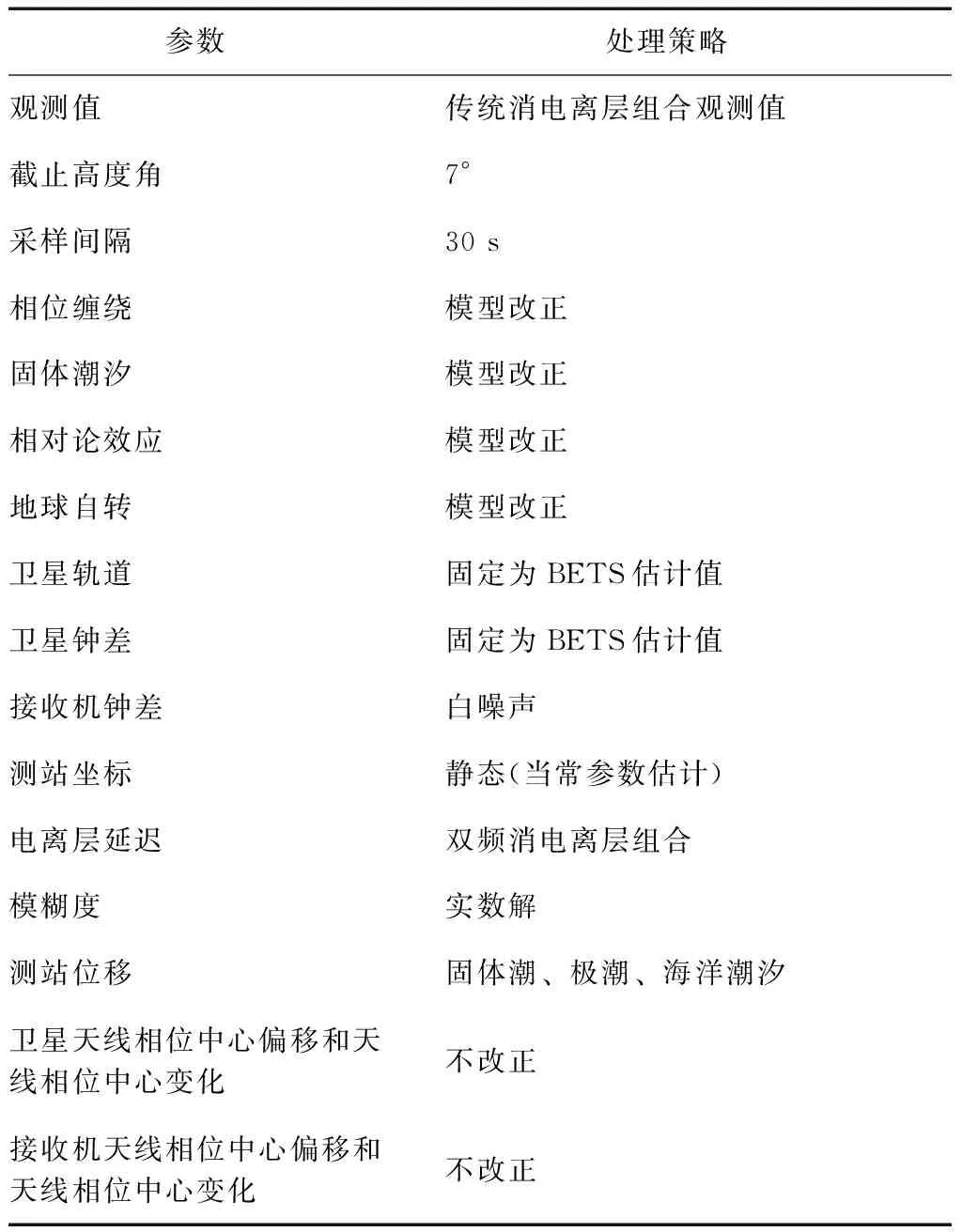
表2 BDS PPP數(shù)據(jù)處理方法
2 實(shí)驗(yàn)與結(jié)果分析
實(shí)驗(yàn)采用CUT0、MAL2、GMSD觀測站2016-05-20—2016-05-22 的BDS觀測數(shù)據(jù)并采用不同的計(jì)算時(shí)長對(duì)觀測站數(shù)據(jù)進(jìn)行實(shí)驗(yàn)并分析,CUT0、MAL2、GMSD各觀測站經(jīng)度、緯度以及天線類型如表3所示。為了分析定位精度,以IGS中心發(fā)布的第1 897個(gè)星期的測站坐標(biāo)解作為參考值,實(shí)驗(yàn)使用的采樣間隔為30 s的精密鐘差和軌道為BETS提供。實(shí)驗(yàn)觀測8 640個(gè)歷元,衛(wèi)星截止高度角為7°,觀測時(shí)間為3 d。可見衛(wèi)星數(shù)如圖1所示,位置精度衰減因子(position dilution of precision,PDOP)的變化如圖2所示。
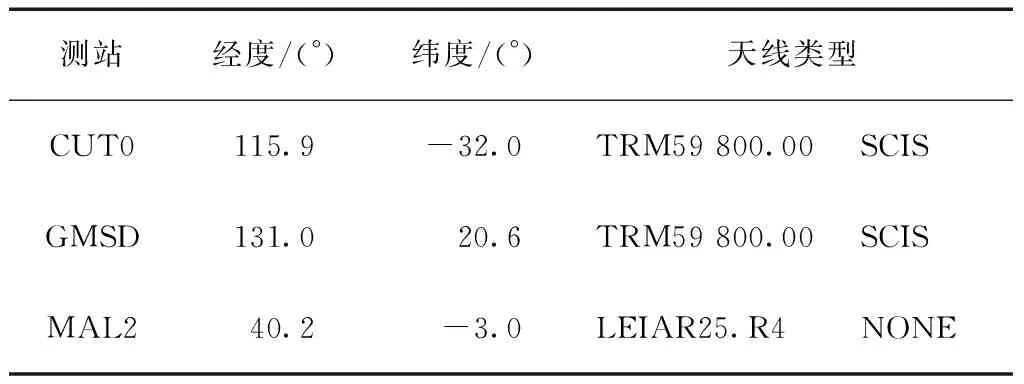
表3 測站相關(guān)信息

圖1 可見衛(wèi)星數(shù)

圖2 PDOP值
計(jì)算分析時(shí),首先將觀測站CUT0、MAL2、GMSD 24 h的觀測數(shù)據(jù)分為36個(gè)觀測時(shí)段,對(duì)這3個(gè)觀測站3 d的數(shù)據(jù)進(jìn)行實(shí)驗(yàn),即每個(gè)子時(shí)段2 h,3 d一共36個(gè)子時(shí)段,以IGS第1 897個(gè)星期的坐標(biāo)作為參考值,分別計(jì)算出每個(gè)時(shí)段所獲得的測站坐標(biāo)在E、N和U方向的定位誤差,其結(jié)果如圖3所示。
然后,將觀測站CUT0、MAL2、GMSD 24 h的觀測數(shù)據(jù)分為4個(gè)觀測時(shí)段,對(duì)這3個(gè)觀測站3 d的數(shù)據(jù)進(jìn)行實(shí)驗(yàn),即每個(gè)子時(shí)段6 h,3 d一共12個(gè)子時(shí)段,以IGS第1 897個(gè)星期的坐標(biāo)解作為參考值,分別計(jì)算出每個(gè)時(shí)段所獲得的測站坐標(biāo)在E、N和U方向的定位誤差,實(shí)驗(yàn)結(jié)果如圖4所示。

圖3 BDS 2 h靜態(tài)精密單點(diǎn)定位誤差
第三,將觀測站CUT0、MAL2、GMSD 24 h的觀測數(shù)據(jù)分為2個(gè)觀測時(shí)段,對(duì)這3個(gè)觀測站3 d的數(shù)據(jù)進(jìn)行實(shí)驗(yàn),即每個(gè)子時(shí)段12 h,3 d一共6個(gè)子時(shí)段,以IGS第1 897個(gè)星期的坐標(biāo)解作為參考值,分別計(jì)算出每個(gè)時(shí)段所獲得的測站坐標(biāo)在E、N和U方向的定位誤差,實(shí)驗(yàn)結(jié)果如圖5所示。
最后,將觀測站CUT0、MAL2、GMSD 24 h的觀測數(shù)據(jù)歸為1個(gè)觀測時(shí)段,對(duì)這3個(gè)觀測站3 d的數(shù)據(jù)進(jìn)行實(shí)驗(yàn),即每個(gè)子時(shí)段24 h,3 d一共3個(gè)子時(shí)段,以IGS第1 897個(gè)星期的坐標(biāo)解作為參考值,分別計(jì)算出每個(gè)時(shí)段所獲得的測站坐標(biāo)在E、N和U方向的定位誤差,實(shí)驗(yàn)結(jié)果如圖6所示。

圖4 BDS 6 h靜態(tài)精密單點(diǎn)定位誤差
由圖1~圖6可知,可見衛(wèi)星數(shù)量和PDOP值對(duì)BDS靜態(tài)精密單點(diǎn)定位精度產(chǎn)生一定的影響。本實(shí)驗(yàn)采用的衛(wèi)星截止高度角為7°,可見衛(wèi)星數(shù)如圖1所示,一般在6顆左右,滿足定位要求;PDOD值的變化如2圖所示,可知衛(wèi)星結(jié)構(gòu)比較理想,滿足實(shí)驗(yàn)要求。從圖3中可以看出,2 h的定位誤差一般在5 cm左右,一小部分誤差超過了5 cm,個(gè)別誤差為6 cm左右,總體來看,E方向與N方向的誤差大小相當(dāng),U方向的誤差較E方向與N方向大,可達(dá)到6 cm。從圖4中可以看出,6 h的定位誤差一般在4 cm以內(nèi),一小部分誤差在4 cm左右,E方向與N方向的誤差大小相當(dāng),U方向的誤差可達(dá)到4.5 cm,總體來看,E方向與N方向的誤差較小,U方向的誤差較大。從圖5可以看出,12 h的定位誤差一般在3 cm左右,一小部分誤差超過了3 cm,個(gè)別誤差為4 cm左右。總體來看,E方向和N方向的誤差較小,U方向的誤差較大,可達(dá)到4.5 cm。從圖6中可以看出,24 h的定位誤差一般在2 cm以內(nèi),一小部分誤差在3 cm左右,有個(gè)別U方向的誤差超過了3 cm,總體來看,E方向和N方向的誤差較U方向的誤差小。同時(shí)從實(shí)驗(yàn)結(jié)果中可以看出,隨著計(jì)算時(shí)長的增加,E、N、U方向誤差逐漸減小。
對(duì)圖3至圖6的定位結(jié)果的均方根(root mean square,RMS)值、標(biāo)準(zhǔn)差(standard deviation,STD)值進(jìn)行統(tǒng)計(jì),CUTO、MAL2、GMSD 3個(gè)不同觀測站的RMS值隨著觀測時(shí)間增加的情況如圖7所示,可以看出U方向RMS值較E、N方向大,隨著觀測時(shí)間的增加E、N、U方向RMS值有所減小。圖8為CUTO、MAL2、 GMSD 3個(gè)不同觀測站STD值的變化,從圖8中可以看出U方向STD值較E、N方向大,隨著觀測時(shí)間的增加,E、N、U方向STD值有所減小。
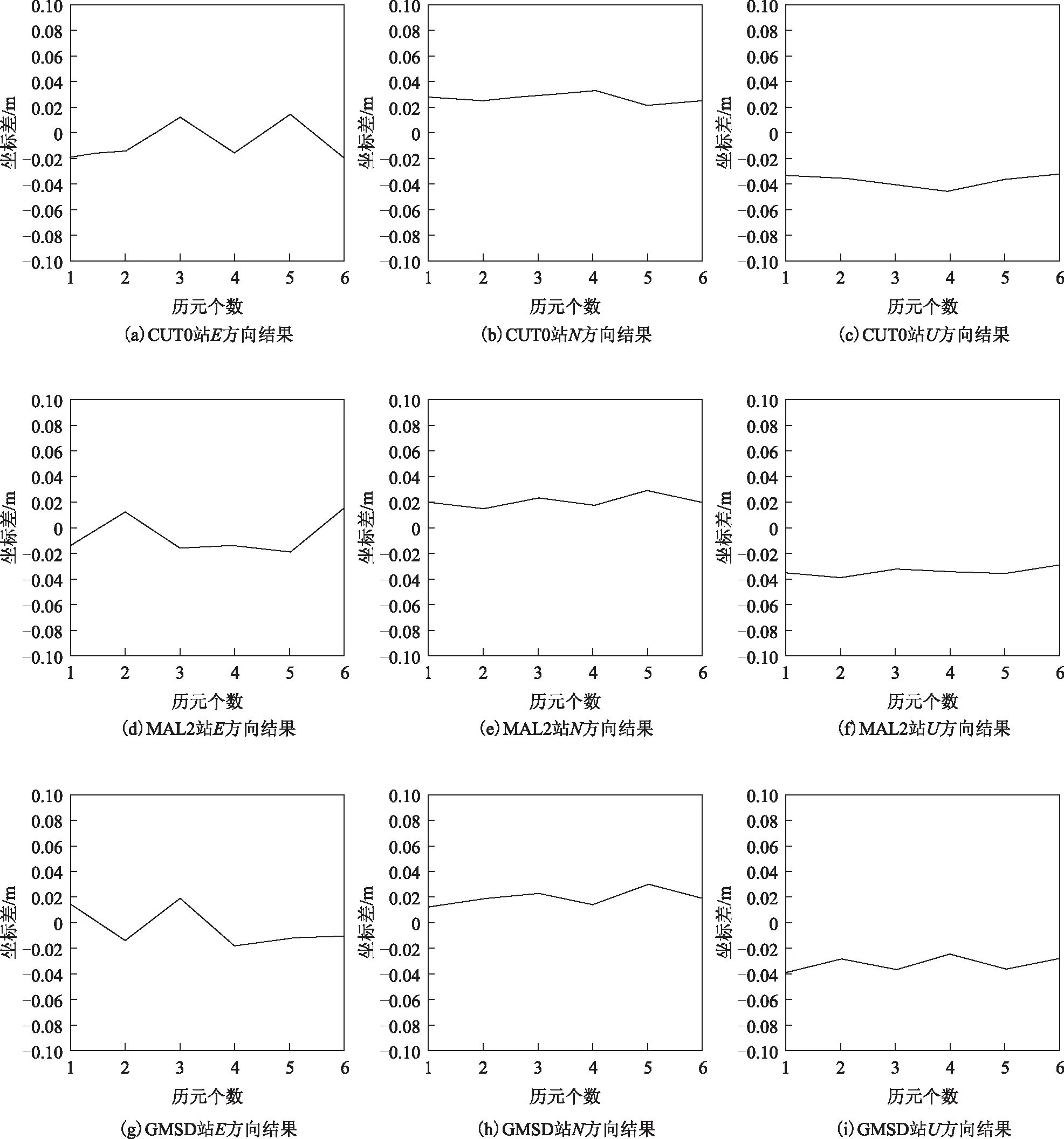
圖5 BDS 12 h靜態(tài)精密單點(diǎn)定位誤差

圖6 BDS 24 h靜態(tài)精密單點(diǎn)定位誤差
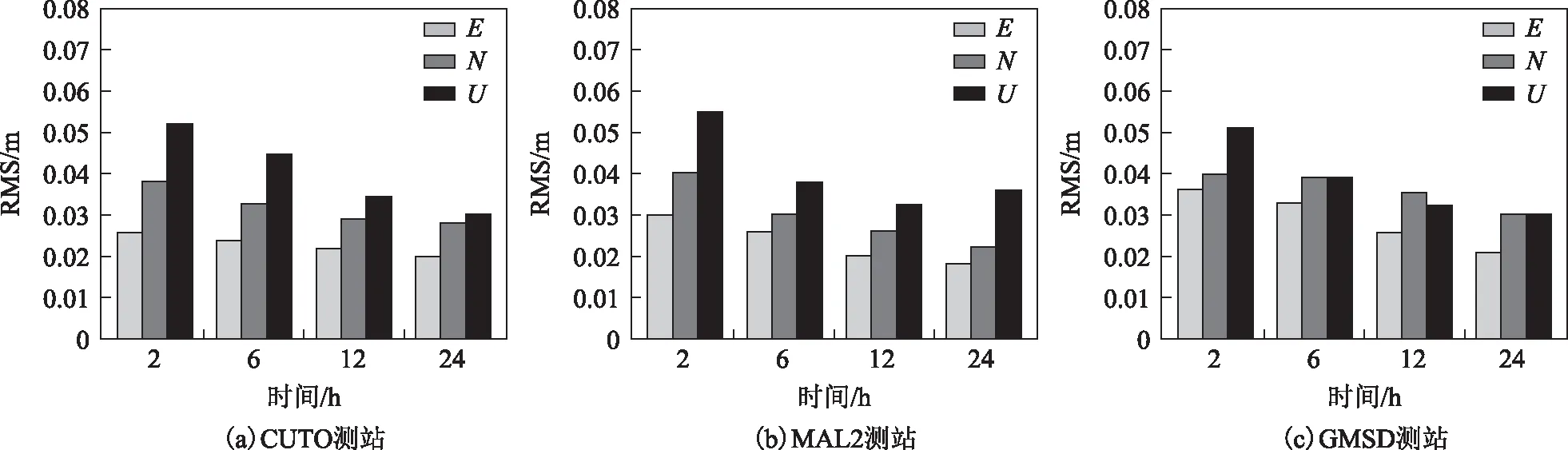
圖7 不同觀測站RMS值
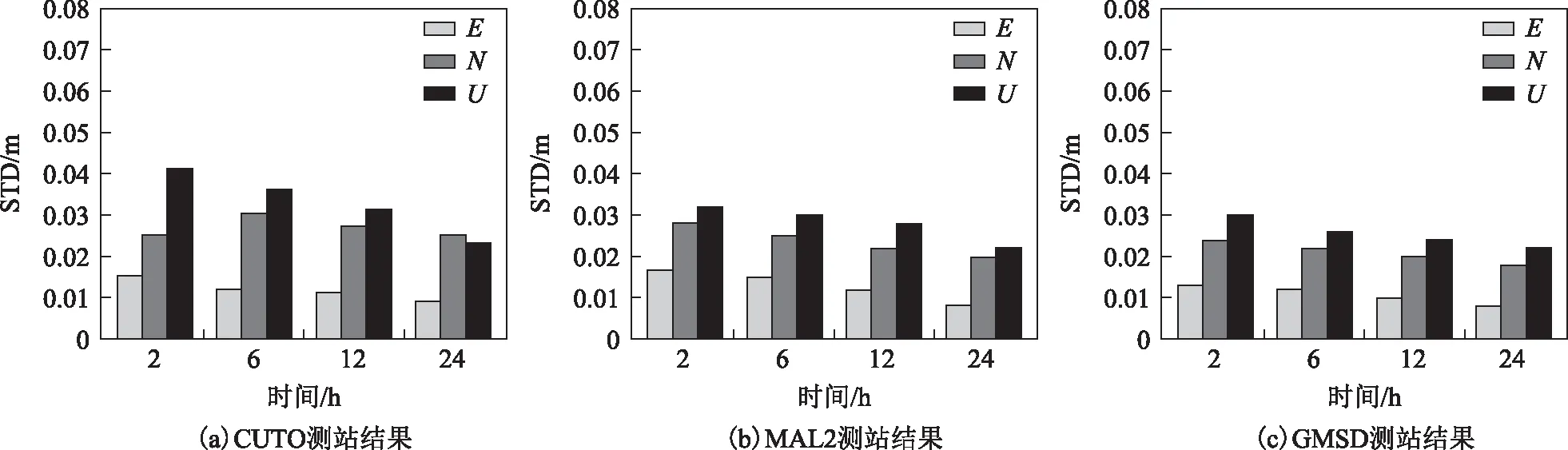
圖8 不同觀測站STD值
3 結(jié)束語
通過實(shí)測數(shù)據(jù)對(duì)CUT0、MAL2、GMSD 3個(gè)測站不同時(shí)段(2 h、6 h、12 h、24 h)進(jìn)行BDS靜態(tài)精密單點(diǎn)定位實(shí)驗(yàn)研究,結(jié)果表明:BDS靜態(tài)精密單點(diǎn)定位誤差在E、N和U方向隨著觀測時(shí)間的增長誤差逐漸減小,E、N方向誤差降低速度小于U方向誤差降低速度,此外,從實(shí)驗(yàn)中可知BDS靜態(tài)精密單點(diǎn)定位精度可達(dá)到dm至cm級(jí),可見衛(wèi)星數(shù)的增加或減少對(duì)BDS靜態(tài)精密單點(diǎn)定位精度會(huì)產(chǎn)生輕微影響,一些情況下可見衛(wèi)星數(shù)增多時(shí)定位精度提高。本文同時(shí)對(duì)CUT0、MAL2、GMSD測站進(jìn)行了RMS值和STD值統(tǒng)計(jì),結(jié)果表明,U方向高于E和N方向。隨著觀測時(shí)間的增加,E、N和U方向均有所減小,但不是特別明顯,說明BDS靜態(tài)精密單點(diǎn)定位較穩(wěn)定。
[1] 徐愛功,韓曉東,崔希民,等.全球衛(wèi)星導(dǎo)航定位系統(tǒng)原理與應(yīng)用[M].徐州:中國礦業(yè)大學(xué)出版社,2009:16-20.
[2] 楊元喜.北斗衛(wèi)星導(dǎo)航系統(tǒng)的進(jìn)展、貢獻(xiàn)與挑戰(zhàn)[J].測繪學(xué)報(bào),2010,39(1):1-6.
[3] 黃令勇,呂志平,劉毅錕,等.三頻BDS電離層延遲改正分析[J].測繪科學(xué),2015,40(3):12-15.
[4] 李征航,張小紅.衛(wèi)星導(dǎo)航定位新技術(shù)及高精度數(shù)據(jù)處理方法[M].武漢:武漢大學(xué)出版社,2009:23-24.
[5] 李星星,張小紅,李盼.固定非差整數(shù)模糊度PPP快速精密定位定軌[J].地球物理學(xué)報(bào),2012,55(3):833-840.
[6] 楊元喜,李金龍,徐君毅,等.中國北斗衛(wèi)星導(dǎo)航系統(tǒng)對(duì)全球PNT用戶的貢獻(xiàn)[J].科學(xué)通報(bào),2011,56(21):1734-1740.
[7] SHI C,ZHAO Q L,LI M,et al.Precise orbit determination of BeiDou satellites with precise positioning[J].Science China Earth Sciences,2012,55(7):1079-1086.
[8] STEIGENBERGER P,BOEHM J,TESMER V.Comparison of GMF/GPT with VMF1/ECMWF and implications for atmospheric loading[J].Journal of Geodesy,2009,83(10):943-951.
[9] BOEHM J,NIELL A,TREGONING P,et al.Global mapping function(GMF):a new empirical mapping function based on numerical weather model data[J].Geophysical Research Letters,2006,33(12):1-4.
[10] 劉朝英,陳國,趙齊樂,等.BDS單點(diǎn)測速原理及精度分析[J].大地測量與地球動(dòng)力學(xué),2014,34(6):114-118.
[11] 徐宗秋,徐愛功,高揚(yáng),等.對(duì)流層延遲參數(shù)與坐標(biāo)參數(shù)的相關(guān)性研究[J].測繪通報(bào),2013(1):25-28.
[12] 姜衛(wèi)平,李昭,邱蕾.一種最新的經(jīng)驗(yàn)投影函數(shù)GMF分析[J].大地測量與地球動(dòng)力學(xué),2009,29(5):85-89.
[13] 徐杰,孟黎,仁超,等.對(duì)流層延遲改正中投影函數(shù)的研究[J].大地測量與地球動(dòng)力學(xué),2008,28(5):120-124.
[14] GRIFFITHS J,RAY J R.On the precision and accuracy of IGS or-bits[J].Journal of Geodesy,2009,83(4):277-287.
[15] ZHAO Q.Initial results of precise orbit and clock determination for COMPASS navigation satellite system[J].Journal of Geodesy,2013,20(1):1-12.
[16] 黨亞民,王虎,趙文嬌,等.融合BDS/GPS/GLONASS 反演全球電離層特性研究[J].大地測量與地球動(dòng)力學(xué),2015,35(1):87-91.
AnalysisofBDSstaticprecisepointpositioningalgorithm
WANGChenxiang1,GEMaorong2,ZHUHuizhong1,MATianming1,GAOMeng1
(1.School of Geomatics,Liaoning Technical University,F(xiàn)uxin,Liaoning 123000,China;2.Geo Science Research Center of German GFZ,Potsdam A1714473,Germany)
In order to improve the accuracy of BDS static precise point positioning algorithm,the paper proposed the related mathematical model,error processing method and the corresponding parameter estimation strategy:the first order term of the ionospheric delay error was eliminated by dual frequency ionosphere free combination model,and the neutral atmospheric delay error,system errors and antenna phase deviation,etc.were corrected by error correction model.Experimental result showed that the visible satellite number and PDOP value would produce errors in BDS static precise point positioning,and the errors of east and north directions would be smaller than those of Up direction;although the number of BDS tracking stations was limited,and the accuracy of BDS precise orbits and clock errors was lower than that of GPS,the BDS static precise point positioning could still achieve an accuracy of decimeter to centimeter level.
BDS precise point positioning;mathematical model;parameter estimation strategy;double frequency non-ionospheric combination model;accuracy analysis
2016-10-18
國家自然科學(xué)基金資助項(xiàng)目(41504010);遼寧省高校團(tuán)隊(duì)創(chuàng)新項(xiàng)目(LT2015013);2014年遼寧省博士啟動(dòng)基金項(xiàng)目(20141141);遼寧省科技廳博士啟動(dòng)基金項(xiàng)目(201501126);遼寧省教育廳科學(xué)研究一般項(xiàng)目(L2014139);國家青年基金項(xiàng)目(41504030);國家重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(2016YFC0803102)。
王趁香(1989—),女,河南開封人,碩士研究生,研究方向?yàn)樾l(wèi)星導(dǎo)航與定位。
王趁香,葛茂榮,祝會(huì)忠,等.BDS靜態(tài)精密單點(diǎn)定位算法分析[J].導(dǎo)航定位學(xué)報(bào),2017,5(4):70-77.(WANG Chenxiang,GE Maorong,ZHU Huizhong,et al.Analysis of BDS static precise point positioning algorithm[J].Journal of Navigation and Positioning,2017,5(4):70-77.)
10.16547/j.cnki.10-1096.20170414.
P228.1
A
2095-4999(2017)04-0070-08
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
