小型雙足機器人直行步態(tài)的并行規(guī)劃策略研究
2018-01-16 01:59:16,,,
上海理工大學學報 2017年6期
關鍵詞:規(guī)劃
, , ,
(1.上海理工大學 機械工程學院,上海 200093; 2.美鉆能源科技(上海)有限公司,上海 200941)
相對于輪式機器人和履帶式機器人而言,雙足機器人以其類人的行走姿態(tài)在多變的地形環(huán)境下顯示出更好的機動性能[1].玩具機器人、陪伴機器人是雙足機器人的重要類別之一,具有外形結構偏于穩(wěn)定、重心低、行走速度慢等特點.此類機器人因成本考慮多采用成本低廉的舵機或電機實現(xiàn)驅動.目前,雙足機器人的研究樣機大多軀干結構較大,其行走步態(tài)的設計包括建模、步態(tài)規(guī)劃、運動學分析、動力學分析、控制系統(tǒng)設計等步驟[2-4].但這種步態(tài)設計方法不適用于此類小型雙足機器人.
本文參照人體自然步態(tài)中雙腿的結構和運動形式,將人體步態(tài)軌跡解析為舵機驅動雙足機器人的關節(jié)轉角-時間函數(shù),并對解析的步態(tài)數(shù)據(jù)進行運動學分析.將PWM信號擬合仿真數(shù)據(jù),通過對髖關節(jié)踝關節(jié)的側向角度調整,得到穩(wěn)定的步態(tài)數(shù)據(jù),并將穩(wěn)定步態(tài)下的物理樣機步態(tài)和虛擬樣機數(shù)據(jù)并行比較,采用并行規(guī)劃策略完成小型雙足機器人直行步態(tài)的規(guī)劃.
1 雙足機器人結構
本文參照人體所設計的雙足機器人,每條腿具有5個自由度,采用舵機驅動,舵機的輸出軸線相互平行或相互垂直,且雙足之間舵機分布對稱,如圖1所示.
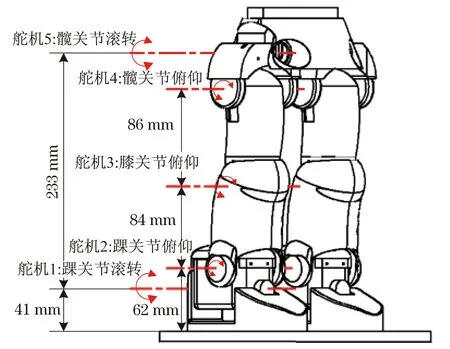
圖1 雙足機器人自由度分布Fig.1 Biped robot freedom distribution
圖1中,舵機1和舵機5用來實現(xiàn)踝關節(jié)和髖關節(jié)在滾轉方向的轉動,這兩個方向的轉動相互配合,完成行走過程中轉換重心的工作;舵機2用來實現(xiàn)踝關節(jié)俯仰方向的轉動,控制單足與地面接觸時的角度,用來緩解接觸沖擊;舵機3用來實現(xiàn)膝關節(jié)俯仰方向的轉動,在機器人起步狀態(tài)時對小腿進行收起和機器人在單足落地狀態(tài)時對小腿進行展開,實現(xiàn)步態(tài)的跨越;舵機4用來實現(xiàn)髖關節(jié)俯仰方向的轉動,在機器人行走狀態(tài)中對大腿進行收抬.本文所設計的雙足機器人用于直行步態(tài)穩(wěn)定行走,因此髖關節(jié)未設置偏航自由度.
2 雙足機器人位姿分析
步態(tài)是在步行運動過程中,步行體的身體各部位在時間和空間上的一種協(xié)調關系,步態(tài)規(guī)劃是雙足步行機器人研究中的一個關鍵技術[5].要實現(xiàn)雙足機器人的步行,首先需要對雙足機器人的位置姿態(tài)進行分析.在雙足機器人的位姿規(guī)劃中,D-H方法已經(jīng)成為了表示機器人和對機器人運動學進行建模的標準方法[6].
本文設計的雙足機器人腿部采用D-H方法建立的模型如圖2所示.圖中,L0,L1,L2,L3分別為軀干中心到髖關節(jié)的距離、髖關節(jié)到膝關節(jié)的距離,膝關節(jié)到踝關節(jié)的距離,踝關節(jié)到足底的距離.O為雙足機器人行走方向坐標系,前進方向為x軸,軀體豎直方向為y軸,右手法則確定z軸.O0為軀干中心坐標系,O1,O2,O3,O4分別表示右腿髖關節(jié)、膝關節(jié)、踝關節(jié)、足底坐標系;O5,O6,O7,O8分別表示左腿髖關節(jié)、膝關節(jié)、踝關節(jié)、足底坐標系.
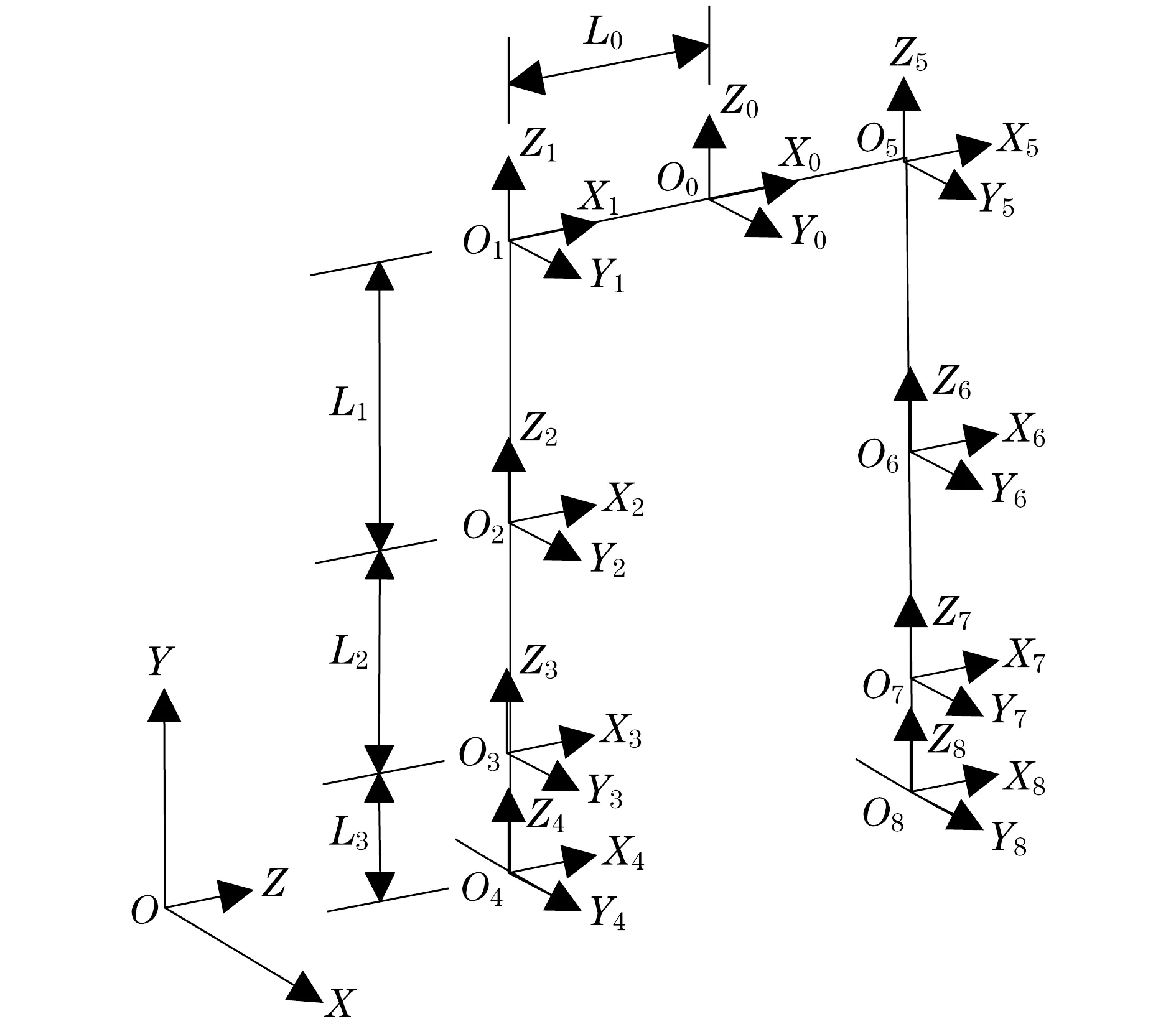
圖2 雙足機器人D-H坐標系Fig.2 Biped robot D-H coordinate
設定繞坐標軸順時針旋轉方向為正向,圖2中O0沿X0負方向平移L0個單位到髖關節(jié)處,髖關節(jié)在X1方向的旋轉角度為θ1,在Y1方向的旋轉角度為θ2,則坐標系O0到O1的齊次變換矩陣為
(1)
同理可得坐標系O0到O4的齊次變換矩陣為
因為雙足機器人關節(jié)舵機是對稱布置的,故采用同樣方法也可以得到坐標系O0到O7的齊次變換矩陣0T7.
3 雙足機器人步態(tài)規(guī)劃
根據(jù)雙足機器人的行走過程,其步態(tài)規(guī)劃可以相應地分成3個部分[7]:起步步態(tài)規(guī)劃、循環(huán)步態(tài)規(guī)劃、止步步態(tài)規(guī)劃.采用5次多項式插值[8-9]的方法來規(guī)劃運動軌跡,可以使機器關節(jié)位置、角速度曲線、角加速度曲線光滑,使得雙足機器人行走動作具有平順性.
3.1 起步步態(tài)規(guī)劃
規(guī)劃機器人起步階段所用時間為1 s,步長為60 mm,最大抬腿高度為25 mm,髖關節(jié)高度從170 mm下降到148 mm.得到的起步階段邁步腿踝關節(jié)O7在x方向約束條件為
(6)

O7x(T)=4 800t3-14 400t4+11 520t5
(7)
O7在y方向約束條件為
(8)
由式(8)求解5次多項式可得到O7在y方向上位置-時間軌跡關系為
O7y(T)=1 600t2-6 400t3+6 400t4
(9)
同樣的方法也可以用來規(guī)劃邁步腿髖關節(jié)O5的軌跡,起步階段O5在x向和y向的軌跡為
(10)
由式(7)~(10)得到邁步腿踝關節(jié)髖關節(jié)在x方向和y方向的位置-時間函數(shù)關系,對t瞬時髖關節(jié)O5、踝關節(jié)O7的坐標求運動學逆解,得到邁步腿膝關節(jié)O6的坐標.利用MATLAB軟件對O5,O6,O7的位置-時間函數(shù)進行離散化處理,每隔0.015 s采樣一個關節(jié)位置點,得到的起步階段步態(tài)棍狀圖如圖3所示.
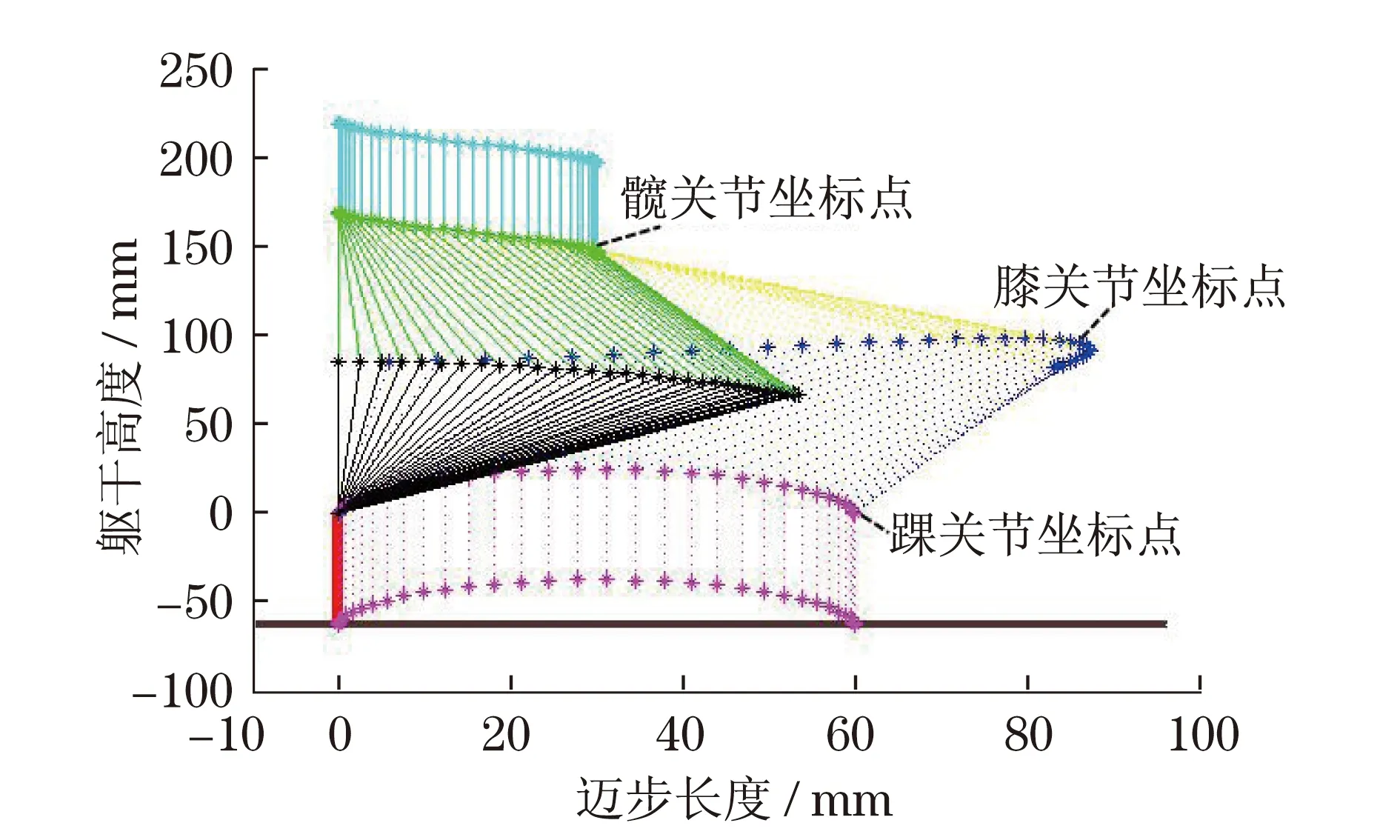
圖3 起步階段步態(tài)棍狀圖Fig.3 Start gait stick figure
從圖3可以看出,支撐腿踝關節(jié)O3為坐標原點,踝關節(jié)O3到地面高度為62 mm,起步步態(tài)規(guī)劃機器人右足為支撐腿,左足向前邁開一步,步長為60 mm.
3.2 循環(huán)步態(tài)規(guī)劃
規(guī)劃機器人在循環(huán)步態(tài)中單步所用時間為2 s,步長為120 mm,最大抬腿高度35 mm,髖關節(jié)高度保持在148 mm.
循環(huán)步態(tài)階段邁步腿踝關節(jié)O3在x向和y向的位置-時間軌跡為
(11)
循環(huán)步態(tài)階段邁步腿髖關節(jié)O1在x向和y向的位置-時間軌跡為
(12)
對式(11)和式(12)求運動學逆解,解得O1,O2,O3的位置-時間函數(shù).利用MATLAB軟件對O1,O2,O3的位置-時間函數(shù)進行離散化處理,每隔0.015 s采樣一個關節(jié)位置點,得到的循環(huán)步態(tài)階段棍狀圖如圖4所示.
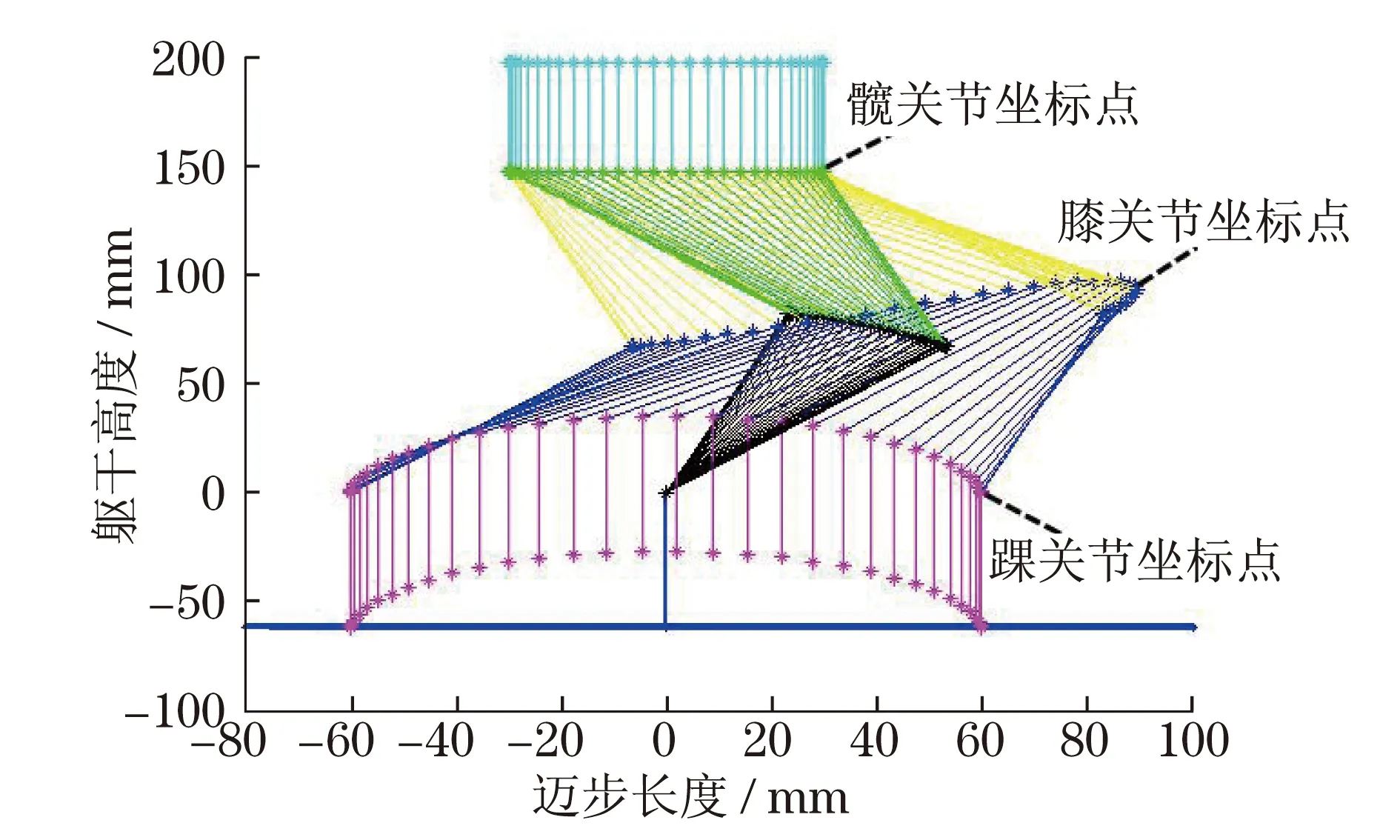
圖4 半周期循環(huán)步態(tài)棍狀圖Fig.4 Half cycle cyclic gait stick figure
由圖4可見,在循環(huán)步態(tài)中,支撐腿和邁步腿之間間隔了半個步行周期,可將邁步腿和支撐腿的關節(jié)數(shù)據(jù)互換,形成左右腿交替邁開的周期步態(tài)[10].
4 雙足機器人直行步態(tài)并行實現(xiàn)
4.1 并行規(guī)劃策略簡述
本文提出采用并行規(guī)劃策略來對雙足機器人步態(tài)進行規(guī)劃.該策略首先由Matlab計算出雙足機器人關節(jié)轉角-時間函數(shù),再將數(shù)據(jù)導入虛擬樣機和物理樣機中.進而通過調整髖關節(jié)和踝關節(jié)在滾轉方向的轉動角度來控制機器人側向的重心偏移,髖關節(jié)O1,O5和踝關節(jié)O3,O7在滾轉方向上相互配合,用于調節(jié)機器人在直行步態(tài)中的重心轉換[11-12](傳統(tǒng)雙足機器人因質量大、重心高、行走速度快而產(chǎn)生的步行慣性力在小型機器人上的作用較小,故本文在研究中忽略步行慣性力).接下來將規(guī)劃的步態(tài)數(shù)據(jù)分別導入ADAMS虛擬樣機和實際物理樣機中.如果物理樣機測試中出現(xiàn)行走不穩(wěn),則調節(jié)步態(tài)規(guī)劃的側向重心偏移角度.再將調節(jié)后的步態(tài)數(shù)據(jù)輸入虛擬樣機和物理樣機中,這樣就可以并行比較虛擬樣機和物理樣機的步態(tài)情況.
4.2 運動仿真
將理論分析求解出的雙足機器人步態(tài)數(shù)據(jù)導入ADAMS虛擬樣機中驗證運動學規(guī)劃的合理性,步行狀態(tài)如圖5所示.
由圖5可以看出,機器人可以按規(guī)劃的軌跡直行,肢體的運動顯示關節(jié)處不存在限位的情況,說明機器人外形結構設計合理.
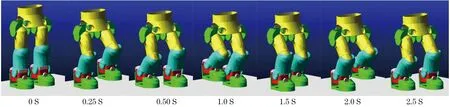
圖5 雙足機器人在ADAMS中步行狀態(tài)截圖Fig.5 Biped robot walking status screenshots in ADAMS
4.3 物理樣機測試
物理樣機在直行步態(tài)中發(fā)生重心不穩(wěn)時,對髖關節(jié)和踝關節(jié)滾轉方向的角度進行調整,使得機器人處于單腳支撐狀態(tài)時,機器人的軀干重心落在支撐腿的支撐面積內.將循環(huán)步態(tài)中單周期的步態(tài)進行循環(huán)延伸,得到雙足機器人每個關節(jié)的轉角-時間函數(shù).測試得到的穩(wěn)定步行狀態(tài)下各關節(jié)的轉角-時間函數(shù)如圖6和圖7 (見下頁)所示.
由圖6~7可以看出,雙足機器人關節(jié)最大轉角發(fā)生在膝關節(jié)處,最大轉角為96.69°.在0~0.5 s,機器人處于起步狀態(tài),左腿先向前邁一步,左踝關節(jié)、左髖關節(jié)、左膝關節(jié)在0.25 s左右達到轉角峰值,在0.5 s時完成左足的著地,0~0.5 s完成雙足機器人的起步狀態(tài).
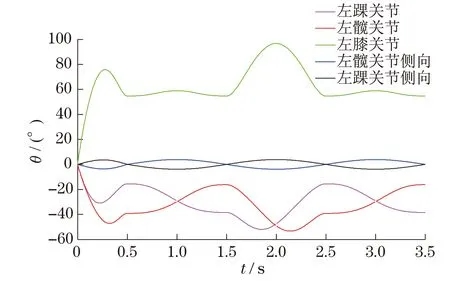
圖6 左腿關節(jié)轉動-時間函數(shù)Fig.6 Left leg joint angle-time function
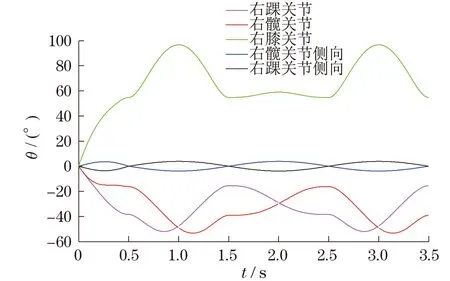
圖7 右腿關節(jié)轉動-時間函數(shù)Fig.7 Right leg joint angle-time function
0.5~1.5 s時間段,右腿向前邁一步,左腿處于支撐狀態(tài),右腿膝關節(jié)在1 s時達到轉角峰值,在1.5 s時完成右足的著地.1.5~2.5 s時間段,左腿向前邁一步,右腿處于支撐狀態(tài),左腿膝關節(jié)在2 s時達到轉角峰值,在2.5 s時完成右足的著地.0.5~2.5 s完成雙足機器人的循環(huán)步態(tài).
將舵機的PWM信號對雙足機器人關節(jié)轉角-時間函數(shù)進行擬合,得到每個關節(jié)舵機的轉角-時間函數(shù),運動仿真的情況和實際物理樣機實時對比,規(guī)劃出雙足機器人物理樣機直行步態(tài)截圖如圖8所示.
在物理樣機下測試得到穩(wěn)定的步態(tài)后,可以在ADAMS后處理模塊,考察當前穩(wěn)定步態(tài)下雙足機器人在虛擬樣機中的兩足運動變化曲線.雙足機器人的左、右足中心和軀干中心在y方向的移動軌跡如圖9所示.
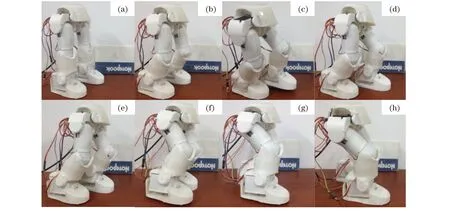
圖8 雙足機器人物理樣機直行步態(tài)截圖Fig.8 Biped robot physical prototype straight gait screenshots
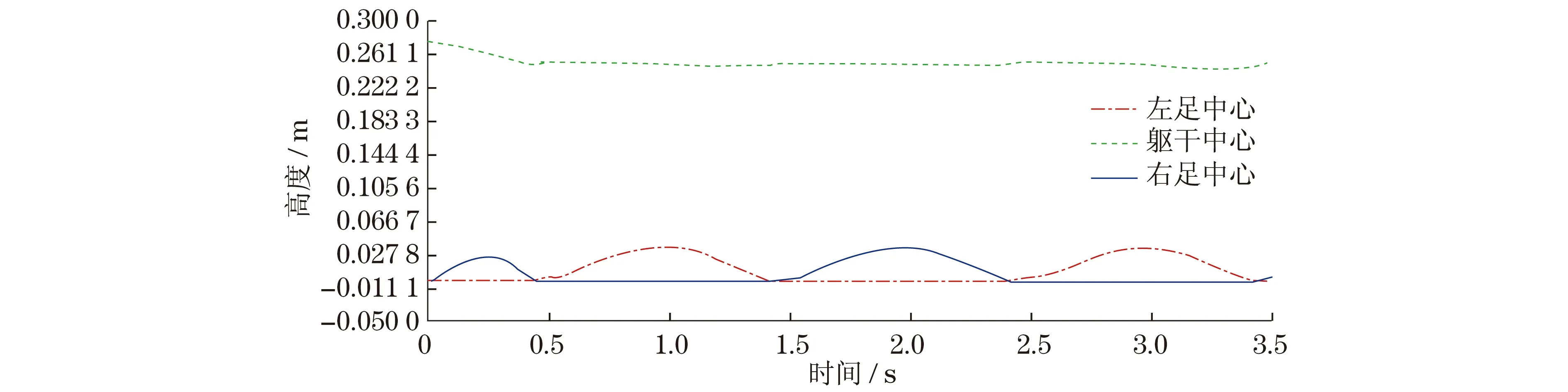
圖9 左、右足和軀干中心在y方向位移Fig.9 Right foot,left foot and trunk center’s displacements in y direction
由圖9可以知道,機器人軀干中心隨著雙足的前進而前進,機器人軀干中心在起步時由277.2 mm下降至250.6 mm,在循環(huán)步態(tài)時候一直保持在250 mm左右.雙足機器人軀干中心在z方向的速度變化如圖10所示.
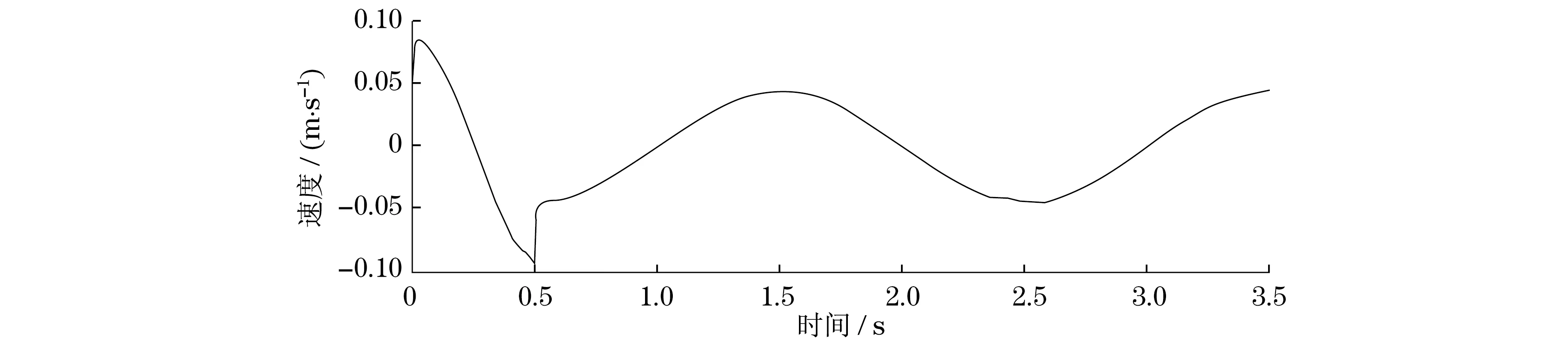
圖10 軀干中心在z方向速度Fig.10 Trunk center speed in z direction
由圖10可以看出,5次多項式插值的軌跡規(guī)劃在速度變化上是光滑的,0.5 s處出現(xiàn)速度波動是由于該時刻為起步步態(tài)和循環(huán)步態(tài)的交接處[13].
5 結 論
本文通過仿人姿態(tài)分析,設計仿人結構的雙足機器人,采用5次多項式插值的方法規(guī)劃出髖關節(jié)和踝關節(jié)的運動軌跡,利用代數(shù)解析法求解出各個關節(jié)的轉角-時間函數(shù).通過并行規(guī)劃策略實現(xiàn)物理樣機直行步態(tài)的規(guī)劃,將數(shù)據(jù)分別導入ADAMS虛擬樣機和實際物理樣機進行并行比較測試.機器人的步態(tài)規(guī)劃通過物理樣機反饋給虛擬樣機進行調整對比,提高了小型雙足機器人步態(tài)規(guī)劃的效率.
[1] 敬成林,朱曉銘.雙足機器人行走控制算法的三維仿真研究[J].計算機仿真,2014,31(3):346-349.
[2] 司媛媛,何斌.基于CPG和小腦模型的雙足機器人行走控制[J].系統(tǒng)仿真技術,2017,13(1):6-10.
[3] 查望華.雙足機器人運動控制系統(tǒng)的研究[D].杭州:浙江大學,2016.
[4] ZHU H B,LUO M Z,ZHAO J H,et al.Soft landing control strategy for biped robot[J].Industrial Robot:An International Journal,2017,44(3):312-323.
[5] 李春光,劉國棟.雙足機器人自然ZMP軌跡生成方法研究[J].計算機工程與應用,2014,50(19):53-57.
[6] NIKU S B.Introduction to robotics:analysis,control,applications[M].2nd ed.New York:Wiley & Sons,2011.
[7] 趙川,張鵬超,潘曉磊,等.機器人的運動軌跡插值方法研究與分析[J].制造技術與機床,2016(6):65-69.
[8] 史耀強.雙足機器人步行仿真與實驗研究[D].上海:上海交通大學,2012.
[9] 楊萍,樊迪.小型雙足機器人步態(tài)規(guī)劃研究[J].機械制造,2015,53(9):39-41.
[10] ZANG X Z,LIU Y X,LIU X Y,et al.Design and control of a pneumatic musculoskeletal biped robot[J].Technology and Health Care,2016,24(S2):S443-S454.
[11] YAMAMOTO K.Control strategy switching for humanoid robots based on maximal output admissible set[J].Robotics and Autonomous Systems,2016,81:17-32.
[12] 郭發(fā)勇.仿人雙足機器人多地形步態(tài)規(guī)劃和穩(wěn)定控制方法研究[D].合肥:中國科學技術大學,2016.
[13] SHAH N H,YEOLEKAR M A.Influence of slope angle on the walking of passive dynamic biped robot[J].Applied Mathematics,2015,6(3):54411.
猜你喜歡
房地產(chǎn)導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
