基于4G移動(dòng)通信的電源視頻監(jiān)控系統(tǒng)
2018-01-17 14:53:48曲鳴飛馬冬寶
電源技術(shù) 2017年12期
曲鳴飛,馬冬寶
(北京電子科技職業(yè)學(xué)院機(jī)電工程學(xué)院,北京100176)
電力系統(tǒng)的正常運(yùn)轉(zhuǎn)關(guān)系到國(guó)家的社會(huì)生產(chǎn)能否正常進(jìn)行,人民的日常生活是否受到影響。電源是整個(gè)電力系統(tǒng)的核心,保障電源的正常工作至關(guān)重要。隨著物聯(lián)網(wǎng)技術(shù)、嵌入式技術(shù)和移動(dòng)通信技術(shù)的快速發(fā)展,基于4G網(wǎng)絡(luò)的電源監(jiān)控系統(tǒng)的可視化成為可能。4G網(wǎng)絡(luò)能夠快速傳輸數(shù)據(jù),從而有效應(yīng)對(duì)視頻監(jiān)控中大流量數(shù)據(jù)的傳輸[1],系統(tǒng)的異常信息能夠通過4G網(wǎng)絡(luò)快速傳輸?shù)娇刂贫耍U舷到y(tǒng)的安全性和穩(wěn)定性。
當(dāng)前視頻監(jiān)控系統(tǒng)的控制邏輯主要通過控制端完成,控制端大多采用分布式監(jiān)控系統(tǒng),每一個(gè)分布式節(jié)點(diǎn)都獨(dú)立負(fù)責(zé)當(dāng)前站點(diǎn)的數(shù)據(jù)監(jiān)控,每個(gè)分布式節(jié)點(diǎn)只需要采集當(dāng)前站點(diǎn)的溫度和濕度等、機(jī)房的空調(diào)狀況、機(jī)房的氣壓情況等諸如此類的系統(tǒng)參數(shù),各個(gè)分布式節(jié)點(diǎn)將獲取到的系統(tǒng)參數(shù)傳輸?shù)娇刂贫耍刂贫烁鶕?jù)各個(gè)分布式節(jié)點(diǎn)的運(yùn)作情況進(jìn)行人工、半人工或者自動(dòng)化管理,這種通過集中式方式進(jìn)行電源監(jiān)控的機(jī)制能夠快速有效地檢測(cè)各個(gè)站點(diǎn)的系統(tǒng)運(yùn)行情況,并針對(duì)具體站點(diǎn)的不同狀況進(jìn)行快速響應(yīng),從而保障電源系統(tǒng)的穩(wěn)定性以及通信設(shè)備的正常運(yùn)行。本文主要介紹了電源視頻監(jiān)控系統(tǒng)的組成部分,并運(yùn)用4G移動(dòng)通信技術(shù)構(gòu)建一套完整的視頻監(jiān)控系統(tǒng)。
1 4G通信組網(wǎng)算法設(shè)計(jì)
4G移動(dòng)通信是相對(duì)于3G移動(dòng)通信而言,作為第四代移動(dòng)通信技術(shù),4G網(wǎng)絡(luò)能夠?qū)崿F(xiàn)高清圖像的快速傳輸,圖像傳輸?shù)那逦群蛨D像質(zhì)量基本沒有明顯損失,并且具有超過2 MB/s的非對(duì)稱數(shù)據(jù)傳輸能力,對(duì)全速移動(dòng)用戶能提供150 MB/s的高質(zhì)量影像服務(wù),并首次實(shí)現(xiàn)三維圖像的高質(zhì)量傳輸,無線用戶之間可以進(jìn)行三維虛擬現(xiàn)實(shí)通信。4G能夠連接來自不同終端、不同頻帶和不同無線平臺(tái)的網(wǎng)絡(luò),在提供無線服務(wù)的同時(shí),能在任何時(shí)刻任何地點(diǎn)快速接入到互聯(lián)網(wǎng)中,作為支撐多功能集成移動(dòng)通信的先驅(qū)技術(shù),在實(shí)現(xiàn)寬帶接入IP系統(tǒng)的同時(shí)提供定時(shí)定位、數(shù)據(jù)采集和遠(yuǎn)程控制等綜合功能[2],是囊括了正交頻分復(fù)用(OFDM)技術(shù)、軟件無線電(SDR)技術(shù)、智能天線技術(shù)(SA)、多輸入多輸出(MIMO)技術(shù)、基于IP的核心網(wǎng)為一體的綜合通信技術(shù)[3]。
電源監(jiān)控系統(tǒng)的數(shù)據(jù)通信層采用4G作為通信載體,數(shù)據(jù)通信層作為連接上層控制層和底層數(shù)據(jù)采集層的中間層,一方面需要均衡整體系統(tǒng)的通信負(fù)載,另一方面需要對(duì)異常情況實(shí)時(shí)監(jiān)測(cè),因此本文設(shè)計(jì)了一種高效的4G通信組網(wǎng)算法。根據(jù)地理位置將通信層劃分為多個(gè)通信簇,通信簇由多個(gè)通信節(jié)點(diǎn)構(gòu)成,通信節(jié)點(diǎn)直接與底層的數(shù)據(jù)采集節(jié)點(diǎn)連接,每個(gè)通信簇選擇一個(gè)通信主體,通信主體的選取原則以最小通信距離為依據(jù),如公式(1)所示。

式中:d為通信簇的通信距離;nt為選取的通信主體;ni為通信簇中通信節(jié)點(diǎn);M為通信簇中通信節(jié)點(diǎn)的數(shù)目。
通信主體的選取算法設(shè)計(jì)如下。
輸入:通信簇C和通信節(jié)點(diǎn)集合n=(n1,n2,…,nM);
輸出:通信主體n(t=i)。
算法流程:
(1)對(duì)節(jié)點(diǎn) ni=(1≤i≤M),計(jì)算通信距離 di,將 di存入集合D中;
(2)對(duì)集合D中所有通信距離di排序,選取t=min{di},記第i個(gè)節(jié)點(diǎn)為通信主體。

通信簇中通信主體負(fù)責(zé)與應(yīng)用層和通信簇中其他節(jié)點(diǎn)進(jìn)行數(shù)據(jù)交互,由于通信簇中只設(shè)置一個(gè)通信主體,因此增加數(shù)據(jù)緩沖區(qū)負(fù)責(zé)簇中其他節(jié)點(diǎn)的數(shù)據(jù)緩存,數(shù)據(jù)緩沖區(qū)的大小設(shè)置如公式(2)所示。式中:s為數(shù)據(jù)緩沖區(qū)的大小;πt為通信節(jié)點(diǎn)兩次通信的時(shí)間間隔;πb為通信的平均數(shù)據(jù)量大小。數(shù)據(jù)緩沖區(qū)采用先寫入先消費(fèi)的設(shè)計(jì)原則,即通信節(jié)點(diǎn)根據(jù)時(shí)間序?qū)?shù)據(jù)寫入數(shù)據(jù)緩沖區(qū),通信主體從數(shù)據(jù)緩沖區(qū)消費(fèi)數(shù)據(jù)。
數(shù)據(jù)通信層采用分布式設(shè)計(jì),根據(jù)地理位置劃分通信簇后,通信簇中通信主體定期與應(yīng)用層交互節(jié)點(diǎn)的工作狀態(tài)和數(shù)據(jù)狀態(tài),通信主體會(huì)實(shí)時(shí)匯報(bào)異常節(jié)點(diǎn)以供上層反饋。當(dāng)通信主體出現(xiàn)異常后,通信簇中節(jié)點(diǎn)會(huì)重現(xiàn)選擇新的通信主體。基于4G通信的組網(wǎng)算法設(shè)計(jì)如下。
輸入:應(yīng)用層App,通信節(jié)點(diǎn)集合n=(n1,n2,…,ns),底層數(shù)據(jù)采集層Z;
輸出:通信簇Cj選取的通信主體nt。
算法流程:
(1)根據(jù)地理位置劃分多個(gè)通信簇Cj(1≤j≤k),k為地理位置數(shù)目,在Cj中根據(jù)上述通信主體選取算法選擇通信主體nt;
(2)通信簇Cj中通信主體nt向應(yīng)用層App匯報(bào),App存入nt到id的映射紀(jì)錄;
(3)通信節(jié)點(diǎn)實(shí)時(shí)與Z和nt進(jìn)行數(shù)據(jù)交互,nt識(shí)別通信節(jié)點(diǎn)的交互數(shù)據(jù)為正常數(shù)據(jù)或異常數(shù)據(jù),異常數(shù)據(jù)則實(shí)時(shí)上報(bào),正常數(shù)據(jù)則定期上報(bào);
(4)通信簇實(shí)時(shí)監(jiān)測(cè)通信主體狀態(tài),若異常則重新選擇新主體并向App層匯報(bào),App層更新新主體到id的映射紀(jì)錄。
2 視頻監(jiān)控系統(tǒng)組成部分
完整的視頻監(jiān)控系統(tǒng)包括數(shù)據(jù)信號(hào)采集層、數(shù)據(jù)通信層和上層應(yīng)用控制層三個(gè)主體部分,數(shù)據(jù)信號(hào)采集層主要通過底層傳感器對(duì)原始的信號(hào)進(jìn)行提取,數(shù)據(jù)通信層作為連接數(shù)據(jù)信號(hào)采集層和上層應(yīng)用控制層的紐帶,主要負(fù)責(zé)數(shù)據(jù)的傳輸和通信,將底層傳感器采集的信號(hào)發(fā)送給控制層,同時(shí)將控制層的命令下發(fā)到底層。
視頻監(jiān)控系統(tǒng)的底層通過傳感器節(jié)點(diǎn)構(gòu)建,傳感器能夠直接獲取環(huán)境的各項(xiàng)參數(shù),環(huán)境參數(shù)作為上層應(yīng)用控制層的重要命令指標(biāo)。傳感器環(huán)境參數(shù)底層通信時(shí)絕大多數(shù)采用ZigBee和WiFi等底層組網(wǎng)協(xié)議進(jìn)行數(shù)據(jù)傳輸,相對(duì)于上層的GPRS和4G移動(dòng)通信,底層數(shù)據(jù)通信協(xié)議能夠支撐的傳輸距離有限,主要兼容能耗和傳輸成本等問題。數(shù)據(jù)信號(hào)采集層將底層的環(huán)境參數(shù)傳輸給上層控制層進(jìn)行決策,同時(shí)控制層的決策命令通過數(shù)據(jù)通信層回返給底層進(jìn)行實(shí)時(shí)處理。因此,從實(shí)現(xiàn)的功能上看,一個(gè)完整的視頻安防監(jiān)控系統(tǒng)通常由前端采集、信號(hào)傳輸、控制和顯示四個(gè)主要部分組成。
2.1 前端采集和傳輸
底層的數(shù)據(jù)采集是整個(gè)視頻監(jiān)控系統(tǒng)的數(shù)據(jù)來源,視頻監(jiān)控系統(tǒng)不局限于簡(jiǎn)單的視頻圖像,還包括溫度、濕度、氣壓、聲音等多種類型的混合數(shù)據(jù),在配備紅外攝像頭的同時(shí),還需要配備溫度傳感器、濕度傳感器和氣壓傳感器等,圖像信息在某些狀態(tài)下無法準(zhǔn)確反映環(huán)境信息,前端采集到的圖像信息、溫度氣壓信息、聲音信息等通過數(shù)字信號(hào)處理技術(shù)轉(zhuǎn)換為模擬/數(shù)字信息,在經(jīng)過編碼器編碼后進(jìn)行后向傳輸,如圖1所示。
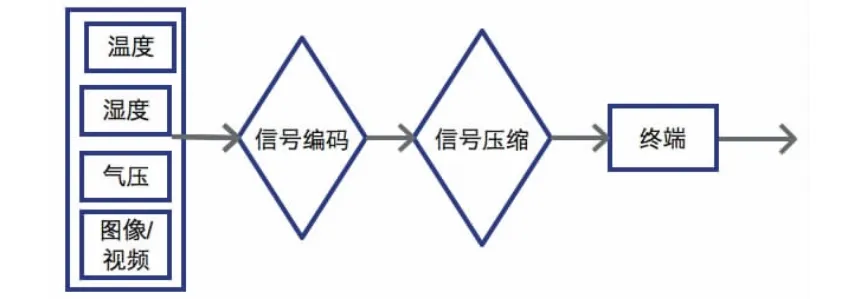
圖1 前端數(shù)據(jù)采集和編碼
數(shù)據(jù)采集器有一定的采集范圍,同時(shí)底層組網(wǎng)的ZigBee節(jié)點(diǎn)也有一定的通信范圍,ZigBee能夠覆蓋的面積為:

式中:R1為數(shù)據(jù)采集器的采集半徑,R2為ZigBee節(jié)點(diǎn)的通信半徑,因此可根據(jù)實(shí)際監(jiān)控范圍設(shè)置ZigBee節(jié)點(diǎn)數(shù)目。ZigBee節(jié)點(diǎn)采集到數(shù)據(jù)后,采用16位的Huffman編碼進(jìn)行數(shù)據(jù)壓縮,壓縮后數(shù)據(jù)與通信節(jié)點(diǎn)進(jìn)行數(shù)據(jù)交互。
2.2 控制顯示單元
控制顯示單元是整個(gè)視頻監(jiān)控系統(tǒng)的核心,所有的控制命令都來自控制單元。控制單元一方面需要對(duì)上報(bào)的數(shù)字信號(hào)解碼分析,另一方面要根據(jù)終端的環(huán)境參數(shù)做出合理的反饋。控制端采用C/S框架,在網(wǎng)關(guān)的設(shè)計(jì)上采用Cortex-A8處理器,Cortex-A8具有較低的功率消耗,相對(duì)于ARM其他系列的處理器,Cortex-A8只需要一半的功率就能夠達(dá)到高出幾倍的處理效率。Cortex-A8也能夠應(yīng)用于復(fù)雜的處理環(huán)境,ARM Cortex-A8、IVA2+、POWERVR SGX Graphics Core、Image SignalProcessor(ISP)這四個(gè)核心部件都能夠獨(dú)立負(fù)責(zé)一部分功能。將Linux內(nèi)核重新編譯之后移植到嵌入式系統(tǒng)中。在終端可通過LED顯示方式進(jìn)行圖形操作,如圖2所示。
3 實(shí)驗(yàn)與仿真
仿真平臺(tái)采用Matlab,實(shí)驗(yàn)?zāi)M100個(gè)ZigBee節(jié)點(diǎn)進(jìn)行數(shù)據(jù)采集,ZigBee節(jié)點(diǎn)單次數(shù)據(jù)傳輸大小為10 bit,單次數(shù)據(jù)傳輸時(shí)間間隔為10 s。設(shè)定10個(gè)地域一共構(gòu)成10個(gè)通信簇,每個(gè)通信簇中均等分為10個(gè)通信節(jié)點(diǎn)。實(shí)驗(yàn)主要對(duì)3G通信、4G通信和GPRS通信三種通信方式在平均通信時(shí)延、平均通信丟失率兩個(gè)數(shù)據(jù)指標(biāo)上進(jìn)行對(duì)比。平均通信時(shí)延和平均通信丟失率計(jì)算為:
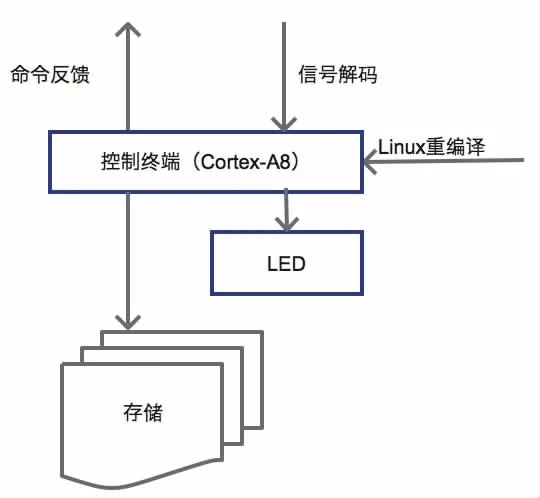
圖2 控制顯示單元

式中:pd和pl分別為平均通信時(shí)延和平均通信丟失率;costd(nt)和costl(nt)分別為通信簇中通信節(jié)點(diǎn)的通信時(shí)延和通信丟失率取平均值。
表1為平均通信時(shí)延和平均通信丟失率在3G、4G和GPRS三種指標(biāo)對(duì)比。實(shí)驗(yàn)分別按10倍比例調(diào)整傳輸數(shù)據(jù)量。3G通信在通信時(shí)延和通信丟失率上表現(xiàn)較差,在數(shù)據(jù)量較小時(shí)性能差別并不明顯,當(dāng)數(shù)據(jù)量增大時(shí)通信時(shí)延和通信丟失率明顯增加。相對(duì)而言,GPRS通信的效率在數(shù)據(jù)量較小時(shí)優(yōu)于4G通信,當(dāng)數(shù)據(jù)量增大時(shí),4G通信的影響較小,GPRS則出現(xiàn)較為明顯的性能差異,這也說明了4G在傳輸大流量數(shù)據(jù)時(shí)具有先天的優(yōu)勢(shì)。
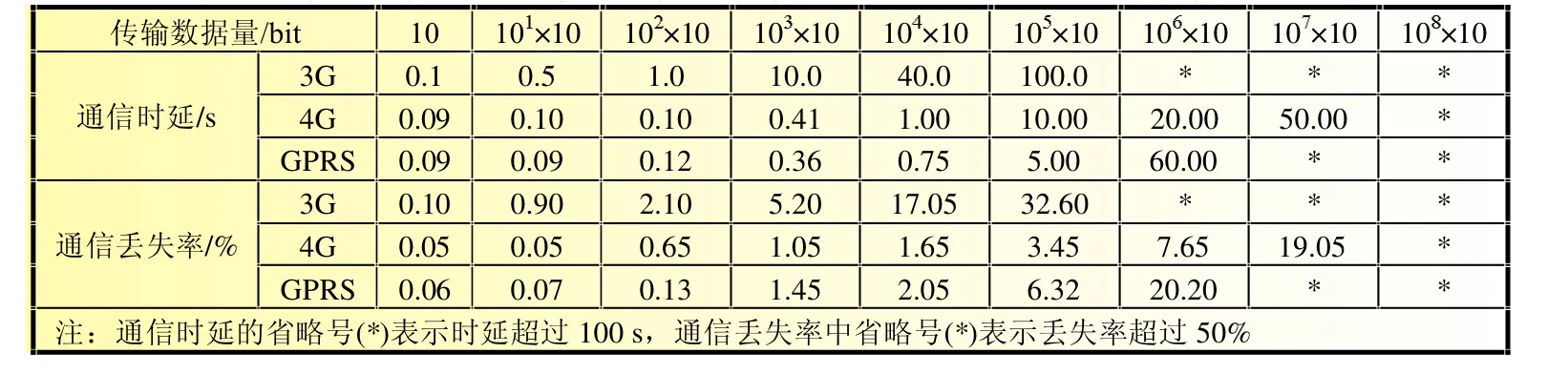
表1 平均通信時(shí)延和平均通信丟失率在3G、4G和GPRS三種指標(biāo)對(duì)比
4 總結(jié)
基于4G的移動(dòng)通信技術(shù)能夠在任何時(shí)刻、任何地點(diǎn)無縫接入網(wǎng)絡(luò),因此4G網(wǎng)絡(luò)能夠在眾多應(yīng)用中嶄露頭角,數(shù)據(jù)的實(shí)時(shí)傳輸和處理一直是應(yīng)用系統(tǒng)需要關(guān)注的核心點(diǎn),本文論述了4G網(wǎng)絡(luò)的關(guān)鍵技術(shù)點(diǎn)并將其應(yīng)用于電源視頻監(jiān)控系統(tǒng)中,極大地提高了監(jiān)控系統(tǒng)的穩(wěn)定性和實(shí)時(shí)性。
[1]胡圣堯,楊子立,關(guān)靜,等.基于GPRS或4G的通信基站電源監(jiān)控系統(tǒng)設(shè)計(jì)[J].電源技術(shù),2016(9):1865-1866,1892.
[2]余嘉文,魏慶衛(wèi),張楊光.基于無線通信技術(shù)的變電站移動(dòng)視頻監(jiān)控系統(tǒng)[J].通信電源技術(shù),2015(6):220-222.
[3]丁若婷,孫越,汪毅雄,等.基于4G移動(dòng)通信的實(shí)時(shí)車輛監(jiān)控管理系統(tǒng)[J].信息通信技術(shù),2015(5):27-32,65.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
南大法學(xué)(2021年3期)2021-08-13 09:22:32
阿來研究(2021年1期)2021-07-31 07:39:04
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)自行車(2018年9期)2018-10-13 06:17:10
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
金色年華(2016年13期)2016-02-28 01:43:27