模糊PI控制在EMT臺架上的調速研究
2018-01-18 00:31:12杜常清趙文帥武冬梅
自動化與儀表 2017年12期
關鍵詞:系統
杜常清,趙文帥,武冬梅
(武漢理工大學 現代汽車零部件技術湖北省重點試驗室,武漢 430070)
電驅動機械式自動變速器EMT,是依據混合動力系統的特點開發出的動力耦合系統,在變速器輸入軸上將電機進行集成安裝,取消了變速器中的同步器,利用電機實現主動調速,能實現縮短換擋時間并提升換擋品質[1]。EMT換擋過程分為5個階段,即驅動力卸載、退擋、選擋和主動同步、進擋、驅動力恢復。經過系統的臺架試驗,在EMT執行換擋過程中,EMT電機轉速主動同步所需的時間較長[2-3]。為此,進行了基于PI控制器的EMT電機速度環調速程序設計和調速試驗。但在PI控制過程中,參數難以整定,為實現EMT電機的調速性能的優化,盡可能縮短調速時間,提供了能實現參數自整定的模糊PI控制器的設計方案,并通過試驗驗證方案的可行性[4]。本文通過軟件實現模糊控制,在PLC調速程序中寫入模糊PI控制子程序,包括轉速數據讀取、模糊化、在線查詢模糊控制表及數據輸出。即通過在線計算電機當前轉速與目標轉速的偏差e及偏差變化率ec,以此作為模糊PI控制子程序的輸入量,由量化因子Ke和Kec將輸入量模糊化,在PLC預定的存儲器中在線查表獲取模糊PI的控制參數。
1 EMT臺架調速系統
1.1 測試臺架總體結構
EMT測試臺架由CAN總線系統、系統控制器、EMT系統、負載模擬系統、液壓系統、冷卻系統等組成[5],如圖1所示。負載電機及其控制器用來模擬換擋環境,EMT系統包括液壓換擋執行機構、齒輪系統及EMT電機。EMT換擋過程中,系統處于動力中斷階段。故在此不考慮負載模擬系統,僅使用EMT系統進行試驗研究。
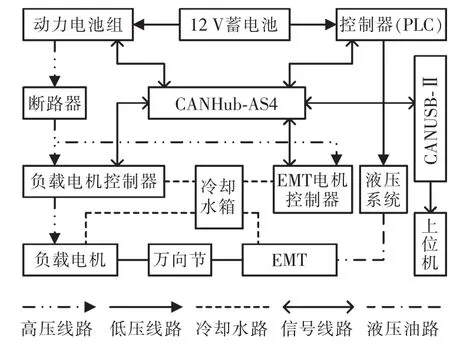
圖1 EMT試驗臺架結構示意Fig.1 EMT test bench structure diagram
1.2 EMT電機選型
EMT電機是該動力耦合系統中極為關鍵的部件,其工作性能對EMT系統的換擋性能有很大影響,進而影響到整車的動力性及經濟性。相對于直流電動機、交流異步電機,永磁電機具有體積小、質量輕的優點,便于在小型車上布置;對比開關磁阻電機,永磁電機的功率密度高且有較高的負荷效率[6]。因此,該臺架選擇永磁同步電機作為EMT電機,電機參數如表1所示。
1.3 模糊PI控制系統調速過程
系統控制器(PLC)從電機反饋的CAN報文中提取EMT電機當前轉速,同時讀入目標轉速并計算偏差及偏差變化率,將計算結果進行模糊化,依此進行在線查詢模糊控制規則表[7]。將相對應的PI整定參數傳送至PI控制器,再由PLC將模糊PI控制器的運算結果以CAN報文的形式發送給電機,實現轉速同步。模糊PI控制示意如圖2所示。
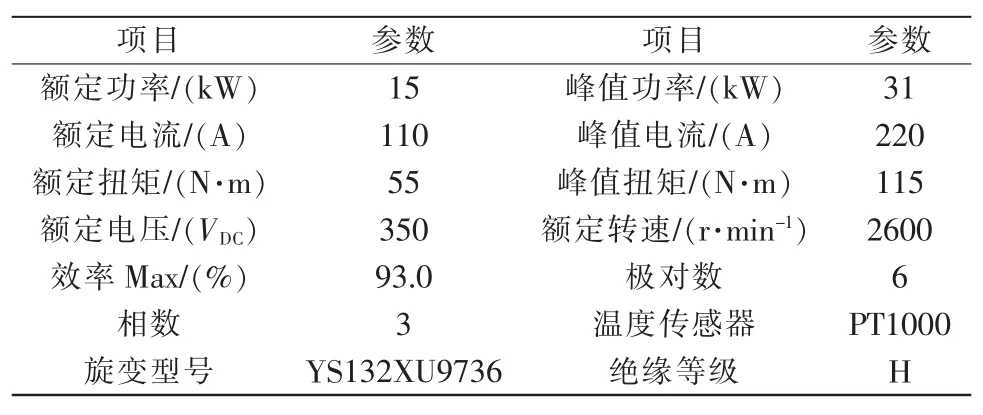
表1 EMT電機參數Tab.1 EMT motor parameters
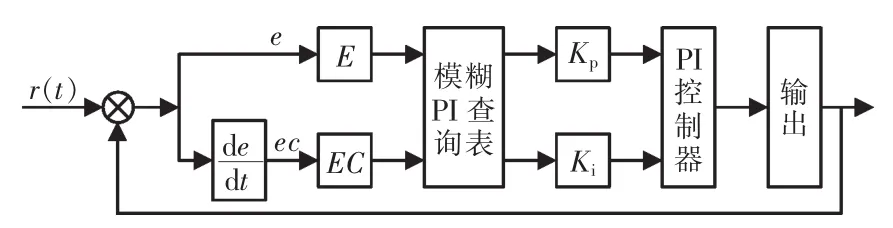
圖2 模糊PI控制示意Fig.2 Schematic diagram of fuzzy PI control
2 模糊PI控制器的設計
模糊控制是閉環控制系統,需要實時監測被控制對象,并將進行模糊推理得到的結論使用在控制系統中。模糊控制的過程分為從被控量輸入到模糊量的轉換,即模糊化過程;建立模糊控制規則;模糊量到精確輸出量的轉換,即解模糊[8-9]。
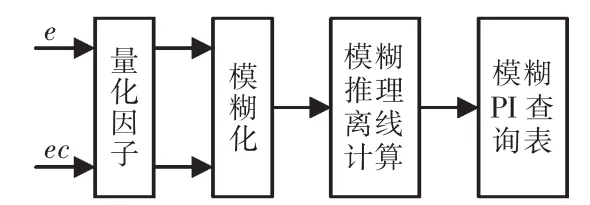
圖3 模糊PI控制查詢表的生成Fig.3 Fuzzy PI control query table generation
2.1 模糊化過程
采用Mamdani模糊模型,使用模糊關系表來實現模糊規則,即用兩維輸入的可查詢表格表示模糊規則庫,利用前后的模糊語言變量進行在線查模糊關系表計算控制量[10]。文中涉及到的模糊控制器的結構是單變量二維模糊控制器,利用EMT電機當前轉速與目標轉速的偏差e和偏差變化率ec作為系統的輸入變量,以ΔKe、ΔKi作為輸出變量。
2.1.1 基本論域
設定EMT電機臺架測試的最高目標轉速為1424 r/min,允許誤差為±2%,為便于系統計算,將目標轉速與實時轉速均除以1000。偏差e的論域為[-0.3,+0.3],偏差變化率 ec 的論域為[-2,+2],輸出 ΔKp的論域范圍為[-0.3,0.3],輸出 ΔKi的論域范圍為[-0.25,0.25]。綜合考慮控制精度以及模糊PI控制器的計算效率,將輸入變量劃分為7個等級。輸入模糊語言變量E和EC的描述為負大、負中、負小、零、正小、正中、正大,相對應的符號分別為 E={NB、NM、NS、ZO、PS、PM、PB},EC={NB、NM、NS、ZO、PS、PM、PB}。 輸出控制量 ΔKp和 ΔKi對應語言變量劃分為5個等級,描述為負大、負中、負小、零、正小、正中、正大;對應符號為{NB、NM、NS、ZO、PS、PM、PB}。將偏差e和偏差變化率ec量化為模糊論域{-3,-2,-1,0,+1,+2,+3}。 輸出量 ΔKp和ΔKi量化為模糊論域{-3,-2,-1,0,+1,+2,+3}。
2.1.2 量化因子
在模糊化處理過程中,須將輸入變量從基本論域經量化因子作用轉換到對應的模糊集論域中[11]。偏差的量化因子Ke=n/xe=3/0.3=10,偏差變化率的量化因子Kec=m/xec=3/2=1.5。
在偏差較大的范圍采用低分辨率隸屬函數模型,即PB、NB采用S形隸屬度函數;在偏差較小的范圍使用高分辨率隸屬函數的模型,即其他語言變量采用三角形隸屬度函數[12]。
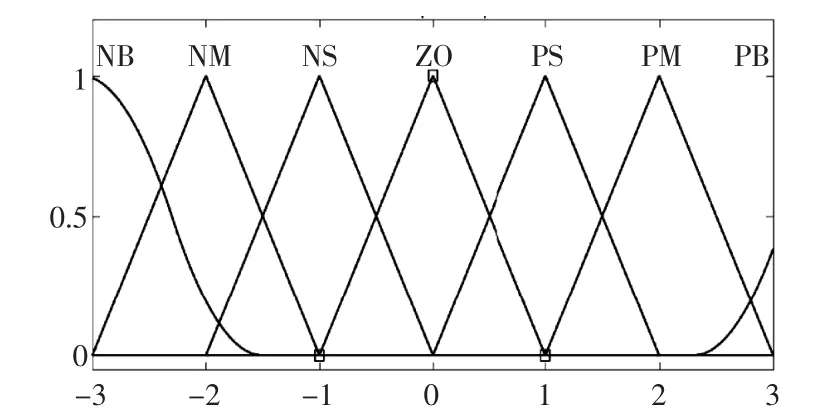
圖4 偏差e和偏差變化率ec的隸屬度函數Fig.4 Membership function of deviation and deviation rate
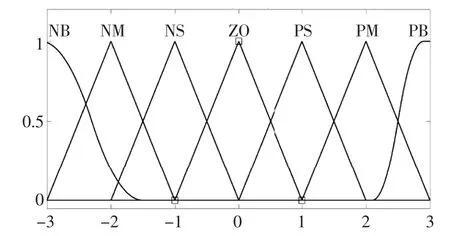
圖5 ΔKp和ΔKi的隸屬度函數Fig.5 Membership function of ΔKpand ΔKi
2.2 模糊控制規則及解模糊化
根據模糊控制相關理論及大量實際試驗制定ΔKp和ΔKi的模糊控制規則,利用Matlab模糊工具箱進行分析。規則的核心為當偏差較大時,需要提高系統響應速度,取較大的比例系數Kp;中等偏差時,取較小的Kp和適當的Ki,降低系統超調量;偏差較小時,取較大的Kp和Ki,保證系統較高的穩定性。輸出量ΔKp和ΔKi的模糊規則云圖如圖6、圖7所示。在此,選取適用于隸屬度函數對稱的加權平均法解模糊[13-14]。
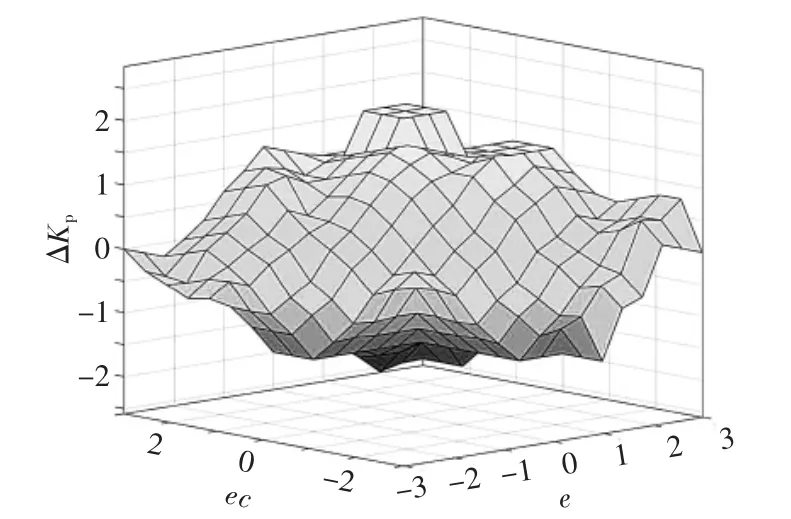
圖6 輸出ΔKp的規則云圖Fig.6 Rule cloud chart of ΔKp
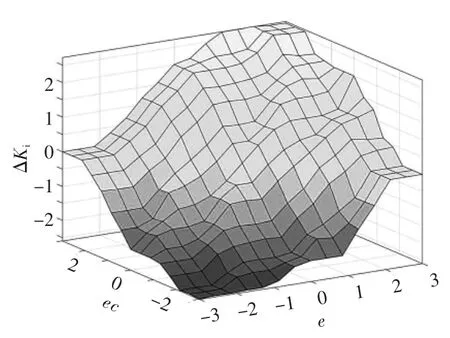
圖7 輸出ΔKi的規則云圖Fig.7 Rule cloud chart of ΔKi
2.3 模糊控制規則查詢表的生成
根據所設計的模糊控制器,利用Simlink建立測試模型,使用其中的System Test工具進行模型測試,得到離散化的輸入與輸出的關系數表,如圖8、圖9所示。
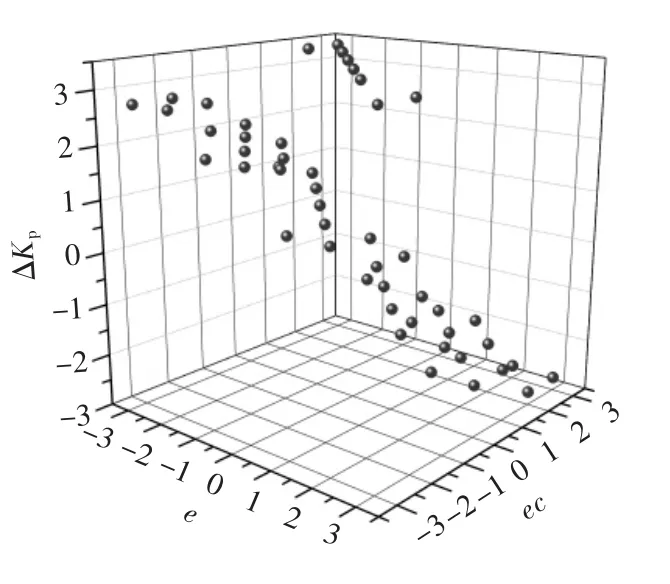
圖8 ΔKp的三維模糊控制查詢圖表Fig.8 3D fuzzy control query chart of ΔKp
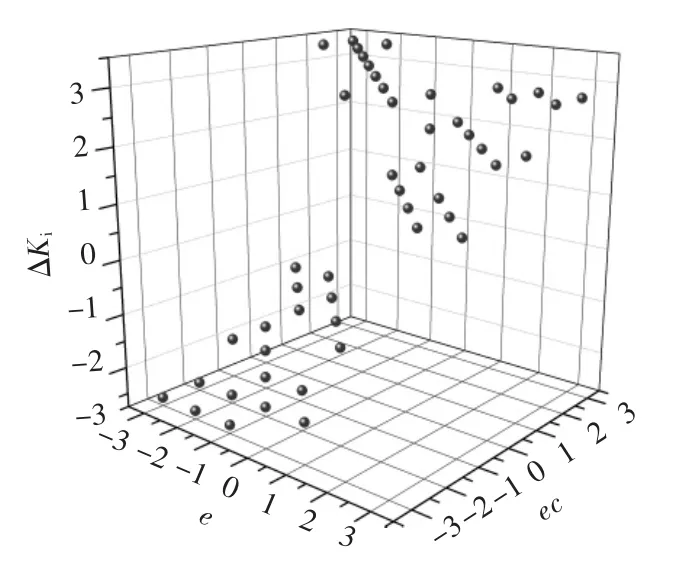
圖9 ΔKi的三維模糊控制查詢圖表Fig.9 3D fuzzy control query chart of ΔKi
編寫PLC程序,將測試得到的模糊PI查詢數表寫入數據塊,由中斷程序定義掃描周期,程序初始化時載入模糊控制數表。在PLC工作中周期性地計算偏差及偏差變化率,并進行模糊化、查詢模糊控制表、解模糊化運算,返回所需要的PI控制參數。
3 臺架試驗
3.1 試驗程序的編寫
EMT電機調速試驗分為程序初始化、實時轉速讀取及差值分析、在線查表、PI控制器、超速保護。程序初始化用于對程序運行中所用到的標志位、計數器的初始化,并定義程序運行周期,CAN報文的設置以及數據存儲區的定義也在初始化時進行。實時轉速讀取及差值分析用于獲取模糊PI控制器的輸入偏差e及偏差變化率ec。通過獲取的偏差e及偏差變化率ec進行模糊化運算,并依據運算得出的模糊語言變量進行在線查表,獲得PI控制器的控制參數。超速保護模塊用來防止因電機或程序故障而出現不可控的轉速波動。
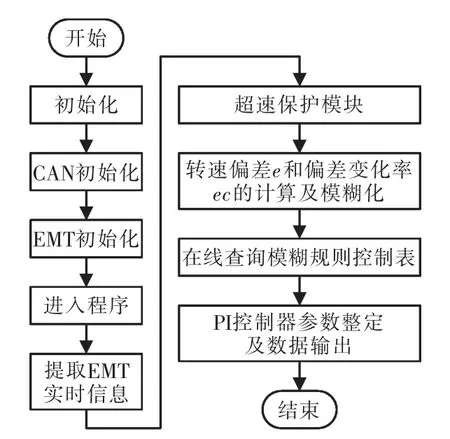
圖10 EMT電機模糊PI調速程序流程Fig.10 Flow chart of EMT motor fuzzy PI speed regulation program
3.2 臺架試驗及數據采集
低壓系統上電后,使用LabVIEW編寫的上位機監控系統解析通過智能CAN接口卡傳輸的CAN報文,以此獲得EMT電機的狀態參數和高壓供電系統狀態參數。在進行試驗之前,EMT置于空擋且充分預熱,使用PLC的填表指令將離線計算的模糊PI查詢表的數據以數據表的形式存放在堆棧式存儲器中,并將采用STEP7編制好的PLC程序及組態下載至S7-200中。使用CANTest軟件以10 ms為周期,以適當的時間間隔依次發送不同的目標轉速報文,在每一個掃描周期內,PLC接收CAN報文后進行解析,提取目標轉速與EMT電機實時轉速并將二者進行比對計算。通過PLC程序的順序掃描,計算得到轉速偏差e及偏差變化率ec,模糊化后進行查詢表模塊操作,將偏差及偏差變化率對應的ΔKp和ΔKi解模糊化后傳送給PI控制器,將PI控制器的運算結果進行CAN報文填寫,進而輸出給EMT電機控制器。
在臺架試驗過程中,上位機監控系統能夠實時顯示EMT電機轉速與轉矩曲線、電機動態參數,并實時記錄保存試驗數據,試驗進行3次。試驗結束后,利用Matlab進行數據整理,剔除穩定階段的轉速數據,重點展現電機控制器內置模塊與模糊PI控制算法在調速階段的差異,并根據試驗數據繪制圖形。
以試驗臺架換擋過程中一擋與二擋間擋位切換為例,在升至二擋的調速過程中,轉速由1424 r/min降低至912 r/min,平均調速時間由155.6 ms減少到102.5 ms,試驗結果如圖11所示;在退至一擋的調速過程中,轉速由646 r/min升高至1158 r/min,平均調速時間由166.3 ms減少到96.8 ms,有輕微超調現象但超調量不到1.5%,試驗結果如圖12所示。
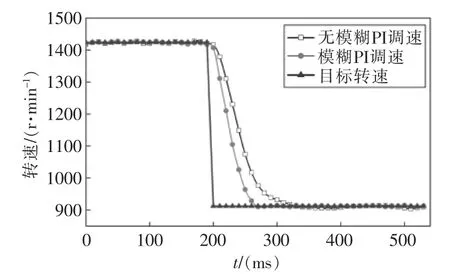
圖11 一擋升至二擋時,兩種調速方式的對比Fig.11 Rose to the second gear,the two speed mode comparison
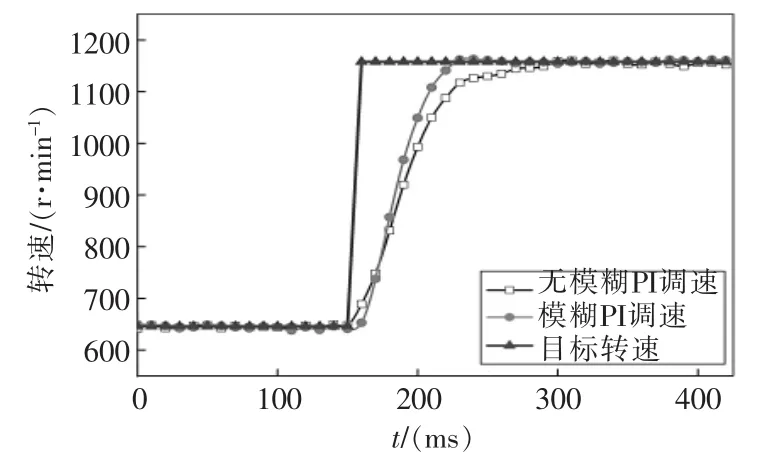
圖12 二擋降至一擋時,兩種調速方式的對比Fig.12 Down to the first gear,the two speed mode comparison
經計算分析,調速完成后的穩態偏差在±1.2%以內,滿足EMT換擋對調速精度的要求。因此,所設計的模糊PI控制算法能使EMT電機調速性能得到較為明顯的改善,EMT系統能在更短的時間內實現轉速同步,換擋過程所耗費時間減少且因擋位切換引起的沖擊較小。
4 結語
本文基于EMT測試試驗臺架,重點對傳遞轉矩大,對調速精度要求高的低擋位進行試驗。依次完成在線獲取實時轉速及電機運行參數;依靠Matlab中的模糊控制工具箱進行了隸屬度函數的選取,模糊規則的制定以及模糊控制查詢表的生成;以PLC為硬件載體進行了模糊控制與PI控制相結合的控制算法的程序化實現等工作。經過多次試驗與修正,所設計的模糊PI控制調速程序能實現對EMT換擋中調速過程的優化,縮短轉速同步時間,能更好地改善轉速、轉矩的接續性并減少換擋過程的沖擊。
[1]曹正策.基于電驅動自動變速器(EMT)的Plug-in并聯混合動力系統研究[D].武漢:武漢理工大學,2011.
[2]Breen J L,Bower G.Clutchless shifting of an automated manual transmission in a hybird powertrain[J].SAE Technical Paper,2011:6-12.
[3]Yoon Y S,Kim K S,Sun J K.Clutchless geared smart transmission[J].SAE Technical Paper,2011:7-15.
[4]李士勇.模糊控制[M].哈爾濱:哈爾濱工業出版社,2011.
[5]劉廣通.電動汽車EMT自動變速器測試臺架設計與試驗研究[D].武漢:武漢理工大學,2017.
[6]曾令全,李書權.電機學[M].北京:機械工業出版社,2010.
[7]向虹霖.基于PLC的模糊控制應用研究[D].成都:西南石油大學,2010.
[8]王立新.模糊系統與模糊控制教程[M].北京:清華大學出版社,2003.
[9]Jantzen,Jan.Foundations of Fuzzy Control[M].Wiley,2007.
[10]常曉恒.模糊自適應整定PID控制器的設計[D].阜新:遼寧工程技術大學,2003.
[11]劉金琨.先進PID控制Matlab仿真[M].北京:電子工業出版社,2004.
[12]溫嘉斌,麻宸偉.無刷直流電機模糊PI控制系統設計[J].電機與控制學報,2016,20(3):102-108.
[13]Karakaya A,Karakas E.Performance analysis of pm synchronous motors using fuzzy logic and self tuning fuzzy pi speed controls[J].Arabian Journal for Science and Engineering,2008,33(4):153-177.
[14]張洪帥,王平,韓邦成.基于模糊PI模型參考自適應的高速永磁同步電機轉子位置檢測[J].中國電機工程學報,2014,34(12):1889-1896.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
