大學(xué)生方程式賽車后輪轉(zhuǎn)向梯形優(yōu)化及仿真
2018-01-18 00:31:24張祥勃何耀華
自動(dòng)化與儀表 2017年12期
關(guān)鍵詞:優(yōu)化
張祥勃,何耀華
(1.武漢理工大學(xué) 汽車工程學(xué)院,武漢 430070;2.現(xiàn)代汽車零部件技術(shù)湖北省重點(diǎn)實(shí)驗(yàn)室,武漢 430070)
大學(xué)生方程式汽車大賽(FSAE)由各國的汽車工程師協(xié)會(huì)舉辦,參賽成員為本科生和研究生,其中中國大學(xué)生電動(dòng)方程式可以允許博士生參加,但不得超過3人。大賽的理念是讓學(xué)生團(tuán)隊(duì)模擬一家制造公司開發(fā)一種小型方程式賽車。開發(fā)的原型賽車是為了評(píng)估其產(chǎn)品潛力,包括商業(yè)、成本等商業(yè)潛力和加速性、穩(wěn)定性等性能潛力。
賽車轉(zhuǎn)向器作為轉(zhuǎn)向系統(tǒng)的重要組成部分,在行車過程中實(shí)現(xiàn)轉(zhuǎn)向功能[1],其作為改變汽車行駛方向及保持汽車穩(wěn)定行駛的關(guān)鍵零部件,其性能的優(yōu)劣直接關(guān)系到人身和比賽成績(jī)[2]。賽車動(dòng)態(tài)比賽中,8字繞環(huán)、高速避障和耐久賽對(duì)賽車轉(zhuǎn)向時(shí)的穩(wěn)定性要求較高。與傳統(tǒng)的兩輪轉(zhuǎn)向賽車相比,四輪轉(zhuǎn)向賽車在低速時(shí)轉(zhuǎn)向半徑更小,具有更好的靈活性;在高速時(shí)回避障礙物的操縱穩(wěn)定性響應(yīng)更好,具有更好的安全性。同時(shí),在《2016中國大學(xué)生方程式汽車大賽規(guī)則》中明確指出允許后輪轉(zhuǎn)向。在四輪轉(zhuǎn)向中,常見的轉(zhuǎn)向動(dòng)力實(shí)現(xiàn)方式有機(jī)械式、電子液壓式、電子液壓機(jī)械式和電動(dòng)式。其中,電動(dòng)助力轉(zhuǎn)向控制系統(tǒng)(EPAS)是一種新型的汽車助力轉(zhuǎn)向系統(tǒng),相對(duì)于傳統(tǒng)液壓動(dòng)力轉(zhuǎn)向(HPS)系統(tǒng),它具有節(jié)約燃料、有利于環(huán)保和可控轉(zhuǎn)向等優(yōu)點(diǎn)。它通過電動(dòng)機(jī)產(chǎn)生助力來幫助駕駛員轉(zhuǎn)向,一般由機(jī)械轉(zhuǎn)向器和電子控制單元組成。汽車轉(zhuǎn)向時(shí),扭矩傳感器測(cè)得駕駛員的輸入力矩,并根據(jù)車速信號(hào)和光電編碼器的轉(zhuǎn)角信號(hào),由控制算法控制助力電機(jī)產(chǎn)生助力力矩來幫助轉(zhuǎn)向[4]。若將電動(dòng)式四輪轉(zhuǎn)向系統(tǒng)和線性比例控制結(jié)合,可以實(shí)現(xiàn)車輛質(zhì)心側(cè)偏角為零的設(shè)計(jì)要求,該系統(tǒng)的另一個(gè)優(yōu)點(diǎn)是前后轉(zhuǎn)向系統(tǒng)之間沒有機(jī)械及油管連接,布置靈活度較高且系統(tǒng)質(zhì)量較小[5]。所以本文的四輪轉(zhuǎn)向?qū)崿F(xiàn)方式選擇采用線性比例控制的電動(dòng)助力轉(zhuǎn)向系統(tǒng),并對(duì)所選的控制策略進(jìn)行角階躍響應(yīng)分析。
1 比賽規(guī)則對(duì)轉(zhuǎn)向設(shè)計(jì)的限制
由于比賽規(guī)則對(duì)設(shè)計(jì)具有指導(dǎo)和限制作用,所以先將部分與轉(zhuǎn)向有關(guān)的規(guī)則事先說明[6]。
(1)方向盤必須與前輪機(jī)械連接。前輪禁止使用線控轉(zhuǎn)向及電控轉(zhuǎn)向。
(2)允許后輪轉(zhuǎn)向(可采用電控轉(zhuǎn)向方式),但后輪的角位移需要被機(jī)械限位裝置限制在最大6°范圍內(nèi)。在技術(shù)檢查中,車手必須坐在賽車中演示,并且車隊(duì)必須提供設(shè)備證明轉(zhuǎn)向的角度范圍。
(3)轉(zhuǎn)向齒條必須與車架機(jī)械連接。如使用螺栓,必須滿足規(guī)則中的要求。
(4)連接方向盤和轉(zhuǎn)向齒條的連接件必須通過機(jī)械連接,并且在技術(shù)檢查中可見。不允許使用沒有機(jī)械支撐的粘接方式。
2 總體布置方案
2.1 整車基本參數(shù)
本文設(shè)計(jì)的搖塊式后輪轉(zhuǎn)向梯形基于武漢科技大學(xué)赤驥車隊(duì)2015賽季賽車,優(yōu)化及仿真所需參數(shù)如表1所示。
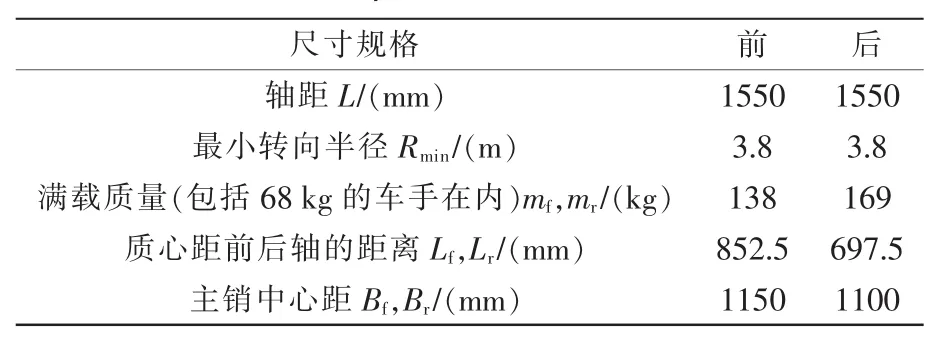
表1 整車基本參數(shù)Tab.1 Basic parameters of the vehicle
2.2 后輪轉(zhuǎn)向電機(jī)選型及主要參數(shù)
由于無刷直流伺服電機(jī)具有體積小、重量輕、精度高、響應(yīng)迅速、力矩穩(wěn)定等特點(diǎn),所以本設(shè)計(jì)選用電壓為12 V的無刷直流伺服電機(jī)。電機(jī)型號(hào)為SMJ無刷直流伺服電機(jī)SMP6212,自帶行星減速器,減速后的基本參數(shù)如表2所示。

表2 電機(jī)基本參數(shù)Tab.2 Motor basic parameters
2.3 后輪轉(zhuǎn)向器選型
FSAE賽車中一般選用齒輪齒條式轉(zhuǎn)向機(jī)構(gòu)作為前轉(zhuǎn)向器。但是由于后輪的轉(zhuǎn)角比較小,規(guī)則限制在6°范圍內(nèi),如果沿用前轉(zhuǎn)向系統(tǒng)中的齒輪齒條式轉(zhuǎn)向機(jī)構(gòu),則齒條行程較小,大概在10~20 mm范圍。同時(shí)由于齒輪齒條配合時(shí)有一定間隙,這種間隙在更小的齒條行程中被放大。在另一方面為了簡(jiǎn)化轉(zhuǎn)向器結(jié)構(gòu),又保證在小轉(zhuǎn)角的范圍內(nèi)實(shí)現(xiàn)阿克曼轉(zhuǎn)向定律,本設(shè)計(jì)采用一種簡(jiǎn)單的轉(zhuǎn)向搖塊結(jié)構(gòu)。具體結(jié)構(gòu)設(shè)計(jì)如圖1所示。
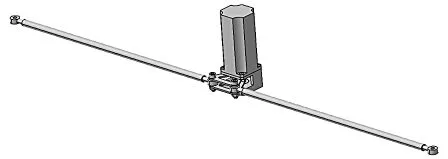
圖1 后輪轉(zhuǎn)向器裝配圖Fig.1 Rear wheel steering gear assembly diagram
2.4 后轉(zhuǎn)向梯形的布置
本文參考車型的懸架為獨(dú)立懸架,與之相配的轉(zhuǎn)向梯形是斷開式轉(zhuǎn)向梯形,其有4種類型,即前方前置(前方指轉(zhuǎn)向機(jī)齒條軸線位于車軸前方,前置是指轉(zhuǎn)向節(jié)臂位于車軸前方,以此類推)、前方后置、后方前置和后方后置[7],如圖2所示。為使轉(zhuǎn)向盡可能輕便,而當(dāng)轉(zhuǎn)向梯形趨近于矩形時(shí),其轉(zhuǎn)向輕便性無疑最優(yōu)。由于FSAE賽車的布置形式基本都為后置后驅(qū),且基本上都為鏈傳動(dòng)。所以差速器和大鏈輪都布置在汽車的后方,兩者的軸線和后軸近似同軸。這種情況下,為防止轉(zhuǎn)向電機(jī)、轉(zhuǎn)向橫拉桿和大鏈輪、大鏈輪護(hù)板、差速器等干涉,梯形的布置只能為后方后置。如圖2(a)所示,總體布置形式如圖3所示。

圖2 轉(zhuǎn)向梯形的4種布置形式Fig.2 Four kinds of steering trapezoidal form

圖3 總體布置形式Fig.3 Overall arrangement
3 后輪轉(zhuǎn)向梯形優(yōu)化
3.1 阿克曼轉(zhuǎn)向幾何關(guān)系
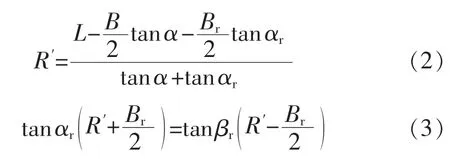
由于四輪轉(zhuǎn)向時(shí)轉(zhuǎn)向半徑由前后轉(zhuǎn)角決定,而后輪轉(zhuǎn)角又由前輪轉(zhuǎn)角及車速?zèng)Q定。這樣無法單獨(dú)求出后輪轉(zhuǎn)角與轉(zhuǎn)向中心的相對(duì)位置關(guān)系。對(duì)此引出前后外側(cè)車輪的大致轉(zhuǎn)角關(guān)系來解決該問題,后輪理想轉(zhuǎn)角關(guān)系如圖4所示。由比例控制及前輪轉(zhuǎn)角變化時(shí)對(duì)應(yīng)的轉(zhuǎn)向半徑關(guān)系,可求得[8]:

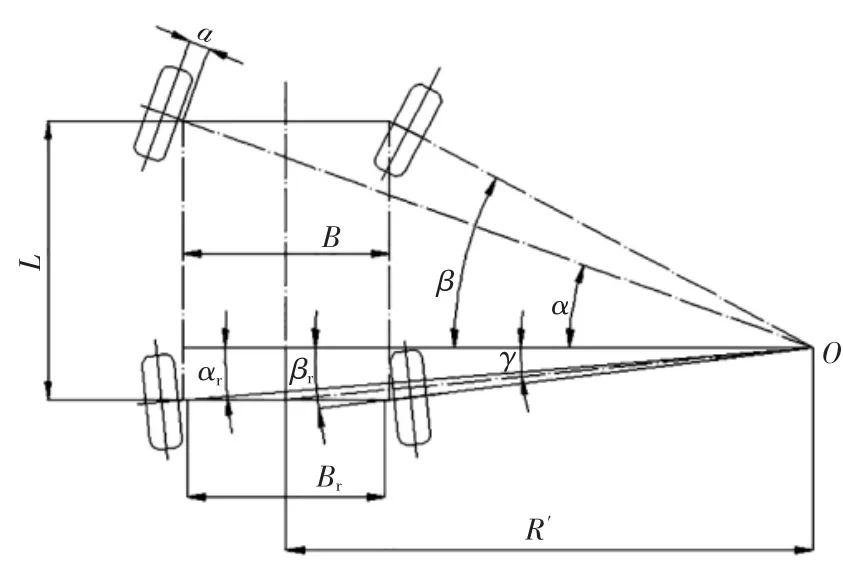
圖4 后輪理想轉(zhuǎn)角關(guān)系Fig.4 Ideal rotation angle of the rear wheel
圖4中交點(diǎn)O稱為轉(zhuǎn)向中心,由圖分析得:
由上述公式可以得出理想后內(nèi)外車輪轉(zhuǎn)向時(shí)的角度關(guān)系。
以此為基礎(chǔ)進(jìn)行后輪轉(zhuǎn)向梯形的優(yōu)化。同時(shí)考慮輪胎側(cè)偏特性,后輪阿克曼轉(zhuǎn)向梯形百分比取50%,則目標(biāo)函數(shù)為

3.2 后輪轉(zhuǎn)角關(guān)系函數(shù)
后輪實(shí)際轉(zhuǎn)角關(guān)系如圖5所示。
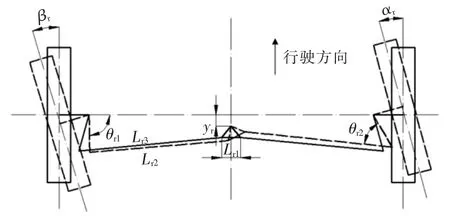
圖5 后輪實(shí)際轉(zhuǎn)角關(guān)系Fig.5 Actual angle of the rear wheel
當(dāng)后外側(cè)車輪轉(zhuǎn)角為0時(shí),可以得到中性位置的轉(zhuǎn)向梯形底角為



式中:Lr1是轉(zhuǎn)向搖塊底邊長(zhǎng)度;Lr2是后轉(zhuǎn)向橫拉桿的長(zhǎng)度(在轉(zhuǎn)向梯形所布置的平面內(nèi));Lr3是后轉(zhuǎn)向節(jié)臂的長(zhǎng)度;yr是轉(zhuǎn)向搖塊上頂點(diǎn)距后軸的距離;c是轉(zhuǎn)向搖塊上頂點(diǎn)距轉(zhuǎn)向搖塊底邊的距離,優(yōu)化中取52 mm;θz是轉(zhuǎn)向搖塊轉(zhuǎn)角;αr是后外側(cè)車輪轉(zhuǎn)角;是后外側(cè)車輪實(shí)際轉(zhuǎn)角。
3.3 后輪內(nèi)外側(cè)車輪轉(zhuǎn)向角誤差分析
以上述的數(shù)學(xué)模型為基礎(chǔ),通過Matlab編寫程序的方式實(shí)現(xiàn),圖6為優(yōu)化流程。

圖6 優(yōu)化流程Fig.6 Flow chart of the optimize
3.3.1 確定設(shè)計(jì)變量和優(yōu)化目標(biāo)函數(shù)
對(duì)于給定的參考車型,其軸距L、輪距B等參數(shù)均為定值,因此在優(yōu)化轉(zhuǎn)向梯形機(jī)構(gòu)時(shí),需要確定的參數(shù)分別為轉(zhuǎn)向搖塊底邊長(zhǎng)度Lr1、后轉(zhuǎn)向橫拉桿長(zhǎng)度Lr2、后梯形臂長(zhǎng)度Lr3和轉(zhuǎn)向搖塊上頂點(diǎn)距后軸距離yr。
方程式賽車一般均在特定的賽道上行駛,賽車場(chǎng)彎道數(shù)量比較密集,且彎道急,駕駛員需頻繁轉(zhuǎn)向。統(tǒng)計(jì)資料表明,賽車外轉(zhuǎn)向輪頻繁的在0°~25°之間變換。因此,為使賽車具有良好的轉(zhuǎn)向性能、駕駛舒適性和較高輪胎壽命等,確定優(yōu)化的目標(biāo)轉(zhuǎn)角范圍為0°~25°。通過對(duì)不同轉(zhuǎn)角使用頻率的分析可以得 10°以下的轉(zhuǎn)角使用較為頻繁,10°~20°的轉(zhuǎn)角次之,20°以上的轉(zhuǎn)角使用最少。因此為使得轉(zhuǎn)向梯形實(shí)際內(nèi)輪轉(zhuǎn)角盡可能接近理論期望值,取如下加權(quán)因子[7]:
構(gòu)成評(píng)價(jià)設(shè)計(jì)好壞的目標(biāo)函數(shù) f(x):

式中,x 是設(shè)計(jì)變量,x=[x1x2x3x4]T=[Lr1Lr2Lr3yr]T。
使用Matlab優(yōu)化工具箱里的Fmincon函數(shù),進(jìn)行多元非線性約束最小值尋優(yōu)問題的求解。
3.3.2 約束條件
轉(zhuǎn)向梯形各桿件的布置應(yīng)體現(xiàn)以下基本原則:
(1)因梯形臂主要承受的是彎矩作用,因此轉(zhuǎn)向橫拉桿與梯形臂盡可能成90°的夾角,以保證力傳遞的效果。
(2)轉(zhuǎn)向橫拉桿與搖塊非底邊之間是力傳遞的關(guān)系,因而在傳動(dòng)過程中,兩桿之間應(yīng)盡可能保持小的夾角,以維持兩桿間壓力角(傳動(dòng)角)在規(guī)定的范圍內(nèi),在優(yōu)化過程中,將其作為非線性約束,即傳動(dòng)角不小于40°。
(3)防止轉(zhuǎn)向梯形在運(yùn)動(dòng)過程中和輪輞、懸架以及制動(dòng)器干涉。
根據(jù)初步設(shè)計(jì),取桿件長(zhǎng)度(mm)初值分別為L(zhǎng)r1=60,Lr2=535.5,Lr3=70,yr=148。
以下為梯形桿件長(zhǎng)度(mm)優(yōu)化變量的變化范圍,即上下限約束:20≤Lr1≤70,500≤Lr2≤560,40≤Lr3≤100,140≤yr≤200。 其中,線性約束為 Lr1+2Lr2≤1250。
在知道目標(biāo)函數(shù)和后輪轉(zhuǎn)角關(guān)系函數(shù)之后,由傳動(dòng)角不小于40°的要求得出非線性約束條件。值得注意的是在后輪轉(zhuǎn)向梯形的優(yōu)化中,后軸距轉(zhuǎn)向搖塊上頂點(diǎn)距離的下限為140 mm,這是由于防止轉(zhuǎn)向電機(jī)與差速器等的干涉造成的。最終的優(yōu)化結(jié)果如表3、圖7和圖8所示。
從圖8可以看出,實(shí)際轉(zhuǎn)角關(guān)系和目標(biāo)函數(shù)基本一致,最大的誤差為0.15°。后輪轉(zhuǎn)向梯形的誤差比較大,這是由于約束條件中的值的下限較大,并不是轉(zhuǎn)向搖塊轉(zhuǎn)向機(jī)構(gòu)本身的缺陷,原因是由于后軸距轉(zhuǎn)向搖塊上頂點(diǎn)距離的下限為140 mm,不能再小的緣故。如果沒有該限值,則優(yōu)化結(jié)果會(huì)更好。

表3 優(yōu)化結(jié)果Tab.3 Optimization results

圖7 理想與實(shí)際后內(nèi)外輪轉(zhuǎn)角關(guān)系Fig.7 Relationship between the ideal and the actual internal and external wheel angle

圖8 理想與實(shí)際后內(nèi)輪轉(zhuǎn)角誤差Fig.8 Ideal and actual inner wheel angle error
4 四輪轉(zhuǎn)向控制策略
4.1 四輪轉(zhuǎn)向的控制方式
四輪轉(zhuǎn)向的前后輪控制方式有很多,主要可分為以下7類[9]:
(1)定前后輪轉(zhuǎn)向比四輪轉(zhuǎn)向系統(tǒng);
(2)前后輪轉(zhuǎn)向比是前輪轉(zhuǎn)角函數(shù)的四輪轉(zhuǎn)向系統(tǒng);
(3)前后輪轉(zhuǎn)向比是車速函數(shù)的四輪轉(zhuǎn)向系統(tǒng);
(4)具有一階滯后的四輪轉(zhuǎn)向系統(tǒng);
(5)具有反相特性的四輪轉(zhuǎn)向系統(tǒng);
(6)具有最優(yōu)控制特性的四輪轉(zhuǎn)向系統(tǒng);
(7)具有自學(xué)習(xí)、自適應(yīng)能力的四輪轉(zhuǎn)向系統(tǒng)。
隨著研究的深入,越來越多的理論被提出。具有代表性的多目標(biāo)綜合具有較高魯棒性,但要求測(cè)量的因素較多,不適合在FSAE賽車中使用。目前研究的比較多的模型跟蹤控制同樣需要同時(shí)測(cè)量多個(gè)狀態(tài)量。雖然提出的算法較多,但沒有公認(rèn)的最優(yōu)控制,并且對(duì)傳感器設(shè)備等要求較高[10]。
目前,應(yīng)用于實(shí)車上的方法主要是前后輪比例控制關(guān)系的控制方法。考慮到可操作性,本設(shè)計(jì)基于二自由度汽車模型,選擇前后輪轉(zhuǎn)角成比例的控制方式進(jìn)行設(shè)計(jì)。
4.2 角階躍輸入響應(yīng)分析
為表征賽車的操縱穩(wěn)定性,引入角階躍響應(yīng)作為評(píng)價(jià)指標(biāo)[11]。根據(jù)理想二自由度汽車四輪轉(zhuǎn)向模型,可求得汽車橫擺角速度和前輪轉(zhuǎn)角的傳遞函數(shù)[12]:

根據(jù)此傳遞函數(shù),求得當(dāng)前輪角階躍輸入時(shí),汽車橫擺角速度的變化。
本次分析設(shè)定階躍信號(hào)的起躍時(shí)間為0 s,幅值為0.1 rad,取車速40 km/h和80 km/h以觀察同向轉(zhuǎn)向和逆向轉(zhuǎn)向的差別。同時(shí)引入前輪轉(zhuǎn)向車輛作為對(duì)比。從圖9中可以看到,在低速(后輪與前輪轉(zhuǎn)角逆向)的情況下,同一速度下的四輪轉(zhuǎn)向車輛的穩(wěn)態(tài)橫擺角速度增益大于前輪轉(zhuǎn)向車輛。較大的橫擺角速度增益表示轉(zhuǎn)過相同的彎道時(shí),如果轉(zhuǎn)向器角傳動(dòng)比相同,四輪轉(zhuǎn)向車輛比前輪轉(zhuǎn)向車輛要轉(zhuǎn)動(dòng)更小的方向盤轉(zhuǎn)角[13]。由于賽道具有較多的小半徑轉(zhuǎn)向彎道,低速轉(zhuǎn)向情況較多,所以四輪轉(zhuǎn)向車輛比前輪轉(zhuǎn)向車輛少打方向盤,具有更好的操作舒適性。在高速(后輪與前輪轉(zhuǎn)角同向)的情況下,同一速度下的四輪轉(zhuǎn)向車輛的橫擺角速度增益小于前輪轉(zhuǎn)向車輛,并且車速越高,差異越明顯。同理,高速時(shí),在相同的轉(zhuǎn)向半徑下,四輪轉(zhuǎn)向要比前輪轉(zhuǎn)向更多地轉(zhuǎn)動(dòng)方向盤,但是一般高速時(shí)轉(zhuǎn)向的轉(zhuǎn)向盤轉(zhuǎn)角較小所以影響不大。同時(shí),在同一車速下,四輪轉(zhuǎn)向車輛和前輪轉(zhuǎn)向車輛各自到達(dá)穩(wěn)態(tài)值的時(shí)間大致相同。造成四輪轉(zhuǎn)向車輛和前輪轉(zhuǎn)向車輛橫擺角速度增益區(qū)別的主要原因是由于后輪轉(zhuǎn)向引起轉(zhuǎn)向半徑的改變,進(jìn)而影響車輛的橫擺角速度。

圖9 橫擺角速度階躍響應(yīng)比較Fig.9 Comparison of step response of yaw rate
當(dāng)前輪角階躍輸入時(shí),汽車質(zhì)心側(cè)偏角與前輪轉(zhuǎn)角之間的傳遞函數(shù):

根據(jù)該傳遞函數(shù)求得角階躍輸入下,車輛質(zhì)心側(cè)偏角的變化規(guī)律如圖10所示。從圖中可以看出,四輪轉(zhuǎn)向車輛的穩(wěn)態(tài)質(zhì)心側(cè)偏角恒為0,車身與行駛軌跡的方向基本一致,所以車輛總是面向其行駛方向,方便駕駛員判斷行駛情況,改善了操縱穩(wěn)定性。前輪轉(zhuǎn)向車輛在低速時(shí),質(zhì)心側(cè)偏角與轉(zhuǎn)向方向同向,高速時(shí)相反。即低速情況下前輪轉(zhuǎn)向車輛有一定甩尾的趨勢(shì),高速時(shí)有一定側(cè)滑的趨勢(shì),均會(huì)惡化車輛的操縱穩(wěn)定性。

圖10 質(zhì)心側(cè)偏角階躍響應(yīng)比較Fig.10 Comparison of step response of centroid deflection
汽車側(cè)向加速度與前輪轉(zhuǎn)角之間的傳遞函數(shù)為

從圖11可以看出,在低速情況下,四輪轉(zhuǎn)向車輛的側(cè)向加速度穩(wěn)態(tài)值大于前輪轉(zhuǎn)向車輛,高速情況下相反。并且高速情況下四輪轉(zhuǎn)向車輛與前輪轉(zhuǎn)向車輛穩(wěn)態(tài)側(cè)向加速度之差較大,即速度越高,四輪轉(zhuǎn)向車輛的操縱穩(wěn)定性優(yōu)勢(shì)越明顯。

圖11 側(cè)向加速度階躍響應(yīng)比較Fig.11 Comparison of lateral acceleration step response
5 結(jié)語
在四輪轉(zhuǎn)向提出初期,主要的控制方式為保證車輛的質(zhì)心側(cè)偏角為0[14],這樣在轉(zhuǎn)向時(shí)車輛會(huì)有更好的循跡性,并提高低速轉(zhuǎn)向時(shí)的靈活性和高速轉(zhuǎn)向時(shí)的操縱穩(wěn)定性。本文根據(jù)方程式賽車設(shè)計(jì)的后轉(zhuǎn)向梯形經(jīng)過優(yōu)化,用角階躍輸入響應(yīng)分析,證明了該后輪轉(zhuǎn)向梯形和前轉(zhuǎn)向梯形匹配,并提高了賽車的操縱穩(wěn)定性。
[1]伍穎,宋康頓,吳選杰,等.循環(huán)球式轉(zhuǎn)向器磨損試驗(yàn)助力泵站的設(shè)計(jì)與實(shí)現(xiàn)[J].機(jī)床與液壓,2015,43(14):75-77.
[2]李晏,王瑾,譚修文,等.汽車轉(zhuǎn)向器齒輪齒條的建模與仿真研究[J].現(xiàn)代制造工程,2010(12):73-76.
[3]王望予.汽車設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2004.
[4]任延,楊家軍,劉照.電動(dòng)助力轉(zhuǎn)向器硬件在環(huán)仿真系統(tǒng)的設(shè)計(jì)[J].湖北工學(xué)院學(xué)報(bào),2004,19(3):44-46.
[5]日本自動(dòng)車技術(shù)會(huì).汽車工程手冊(cè)[M].北京:北京理工大學(xué)出版社,2010.
[6]李理光.2016中國大學(xué)生方程式汽車大賽規(guī)則[M].中國汽車工程學(xué)會(huì),2016.
[7]柴天.FSAE賽車整車性能分析與研究[D].湖南:湖南大學(xué),2009.
[8]程勇.四輪轉(zhuǎn)向商用車前后轉(zhuǎn)向梯形優(yōu)化設(shè)計(jì)[D].湖北:武漢理工大學(xué),2014.
[9]劉戰(zhàn)芳.4ws車輛的建模和控制方法的研究分析[D].安徽:合肥工業(yè)大學(xué),2008.
[10]顏四平,黃玲琴,周淑文.基于ADAMS的四輪轉(zhuǎn)向汽車虛擬樣機(jī)建模與動(dòng)力學(xué)仿真[J].汽車科技,2007(5):14-17.
[11]RongrongWang,HuiZhang,Junmin Wang.Linearparametervarying controller design for four-wheel independently actuated electric ground vehicles with active steering systems[J].Control System Technology,2014,22(4):1283-1295.
[12]楊叔子,楊克沖.機(jī)械工程控制基礎(chǔ)[M].6版.武漢:華中科技大學(xué)出版社,2011.
[13]舒進(jìn),陳思忠.四輪轉(zhuǎn)向車輛運(yùn)動(dòng)計(jì)算分析[J].湖北汽車工業(yè)學(xué)院學(xué)報(bào),2002,16(3):1-5.
[14]Sano S,F(xiàn)urukawa Y,Shlralshis.Fourwheel steering system with rear wheel steer angle controlled as a function of steering wheel angle[J].SAEPaper860625,1986.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
