基于Simulink/CarSim的磁流變懸架預(yù)瞄模糊控制
2018-01-18 00:31:40李超群
自動化與儀表 2017年12期
關(guān)鍵詞:模型
鄒 斌,熊 輝,李超群,劉 康
(武漢理工大學(xué) 現(xiàn)代汽車零部件技術(shù)湖北省重點實驗室 汽車零部件技術(shù)湖北省協(xié)同創(chuàng)新中心,武漢 430070)
隨著車輛技術(shù)的不斷發(fā)展,人們對車輛各項性能的要求越發(fā)嚴格。由D.A.Croshy和D.C.Karnopp在1973年首先提出的半主動懸架系統(tǒng)[1],能夠?qū)崟r調(diào)節(jié)阻尼或剛度來產(chǎn)生良好的懸架控制力從而有效提高車輛的乘坐舒適性與行駛安全性。由于磁流變液性能穩(wěn)定可靠、阻尼連續(xù)可調(diào)且響應(yīng)迅速等優(yōu)勢,使得磁流變半主動懸架系統(tǒng)成為當前懸架系統(tǒng)領(lǐng)域研究的熱點。
磁流變減振器具有巨大潛力,國內(nèi)外很多學(xué)者對其進行了深入的研究,如Lord,F(xiàn)ord,德爾福公司以及京西重工[2]等汽車公司。同時,學(xué)者們在天地棚阻尼控制、最優(yōu)控制、魯棒控制、自適應(yīng)控制、滑模非線性控制、智能控制等半主動懸架控制策略方面也做了大量研究工作[3]。
預(yù)瞄控制作為一種較新的懸架控制方法,將未來道路信息用于控制策略中,能夠有效解決控制滯后問題,從而提高控制效果[4]。考慮到目前很多仿真研究工作基于理想簡單的二自由度1/4車輛模型、四自由度1/2半車模型、七自由度整車模型為車輛動力學(xué)模型,以及二維路面時域模型為路面輸入模型[5-7],在此利用專業(yè)車輛動力學(xué)軟件CarSim中的整車動力學(xué)模型以及基于標準路面不平度模型的CarSim三維道路模型為仿真研究基礎(chǔ),結(jié)合模糊控制與軸距預(yù)瞄控制,以前懸架感受到的路面信息作為后懸架的前饋控制信息,與反饋控制并行控制,有效抑制車輛簧載質(zhì)量的振動、減振器動撓度以及輪胎動變形,實現(xiàn)車輛的乘坐舒適性與行駛安全性的優(yōu)化。
1 磁流變減振器模型
由于磁流變減振器具有很強的非線性,很難建立與實際器件完全相符的模型。考慮到基于Bouc-Wen模型的現(xiàn)象模型能夠很好地描述磁流變減振器的動態(tài)性能,且比較靈活,優(yōu)于其他模型[8],故使用現(xiàn)象模型對磁流變減振器進行建模。
Spencer等提出的現(xiàn)象模型[9]結(jié)構(gòu)如圖1所示,其數(shù)學(xué)模型為
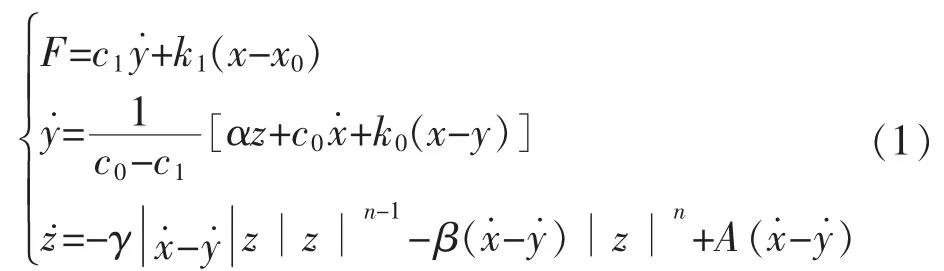
式中:F為模型輸出阻尼力;c0為高速時的黏滯阻尼系數(shù);c1為低速時的黏滯阻尼系數(shù);x為減震器活塞桿的位移;k0為高速時的控制剛度;k1為磁流變阻尼器的蓄能器剛度;x0為彈簧k1的初始位移;α,γ,n,β,A為磁流變減振器模型調(diào)節(jié)參數(shù);z為滯變位移。 其中,α0,c0,c1與磁流變減振器輸入電流呈函數(shù)關(guān)系。
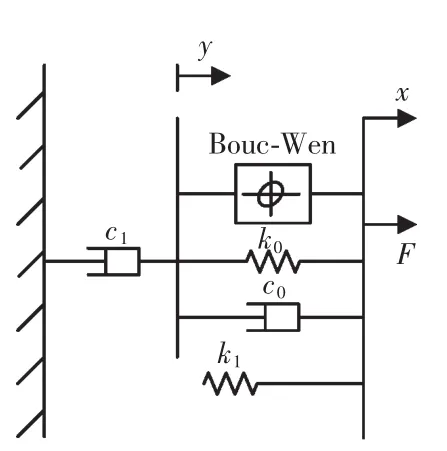
圖1 基于Bouc-Wen模型的現(xiàn)象模型結(jié)構(gòu)Fig.1 Structure of phenomenological model based on Bouc-Wen model
在Simulink中建立基于現(xiàn)象模型的磁流變減振器模型,電流范圍取0~1 A,正弦激勵振幅取±0.03 m,頻率取2 Hz,所建立的磁流變減振器模型隨電流變化的外特性曲線如圖2所示。
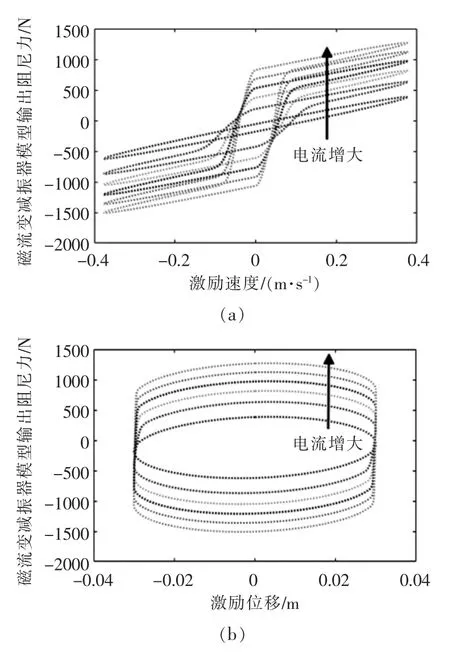
圖2 基于現(xiàn)象模型的磁流變減振器模型外特性曲線Fig.2 Outer characteristic curve of MR damper model based on the phenomenological model
由圖可見,當激勵信號振幅與頻率為定值,激勵速度相同時,模型輸出阻尼力隨電流的增大而增大;激勵位移相同時,阻尼力也隨電流增大而增大。同時,模型較準確地描述了滯回現(xiàn)象,低速時滯回環(huán)較大,高速時滯回環(huán)較小。應(yīng)用此模型可以很好地模擬磁流變減振器各階段的動態(tài)行為,其有效性已經(jīng)在Lord公司的RD21000型磁流變減振器上得到驗證。
2 隨機路面輸入模型
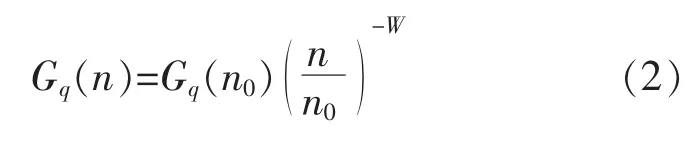
式中:n為空間頻率;n0為參考空間頻率,一般取n0=0.1 m-1;Gq(n0)為參考空間頻率 n0下的路面功率譜密度;W為頻率指數(shù),一般取W=2。
根據(jù)車速u,將空間頻率功率譜密度Gq(n)換算為時間頻率功率譜密度Gq(f),空間頻率與時間頻率關(guān)系為

將式(3)帶入式(2),得

路面不平度主要采用路面功率譜密度來描述其統(tǒng)計特性[10]。功率譜密度的擬合表達式為
路面不平度時域仿真模擬方法主要有濾波白噪聲生成法、AR/ARMA模型法、FFT逆變換生成法以及諧波疊加法等[11]。在此,采用諧波疊加法建立B級三維路面模型,其可行性在文獻[12]中得到驗證。一般地,路面空間頻率n=0.011~2.83 m-1,在常用車速u=10~30 m/s下,對應(yīng)的時間頻率范圍為f=0.33~28.3 Hz。將此范圍內(nèi)的時間頻率f等分為N=200段,取每小段中心頻率fmid,i處的功率譜密度值Gq( fmid,i)來取代此小段的 Gq( f),則在時間域內(nèi)用諧波疊加法模擬隨機路面不平度為
式中:θi為[0,2π]內(nèi)的隨機數(shù);q(t)為時域內(nèi)的路面高程;t為某車速下的時間歷程;▽fi為每小段頻率長度。將時域模型轉(zhuǎn)換為空間域模型
式中:x,y 分別為路面縱、橫向行程;q(x,y)為空間域內(nèi)的路面高程;θi(x,y)為[0,2π]內(nèi)的隨機數(shù)。 取車速u=20 m/s,在Matlab中建立的區(qū)域標準B級三維路面模型如圖3所示,并將此模型數(shù)據(jù)寫入Car-Sim路面文件,生成CarSim路面模型。
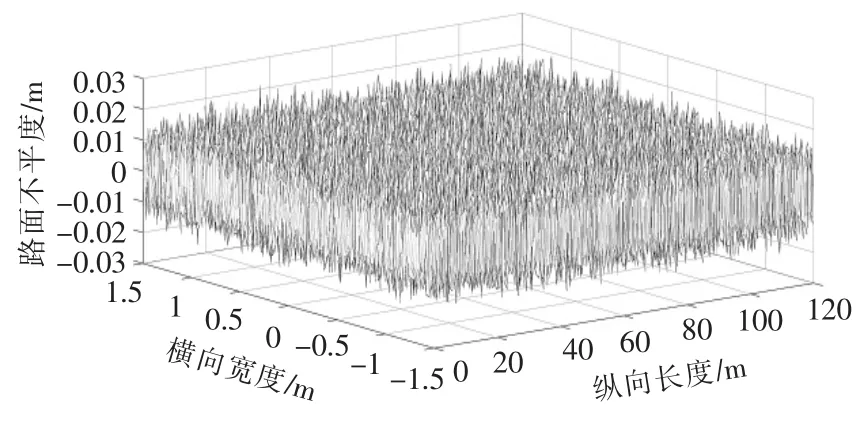
圖3 B級路面三維路譜Fig.3 3D road surface of class B pavement
3 軸距預(yù)瞄模糊控制器設(shè)計
預(yù)瞄控制最早由Bender提出[13],是將懸架前面的路面信息(預(yù)瞄信息)用于控制策略,從而提高懸架系統(tǒng)性能的方法。預(yù)瞄控制可分為車前預(yù)瞄和軸距預(yù)瞄,前者利用車前傳感器來獲取道路預(yù)瞄信息,后者利用前輪感受到的路面信息作為后輪的預(yù)瞄信息。相比而言,軸距預(yù)瞄所需要的傳感更少,性價比更高,更具有可行性。軸距預(yù)瞄基于汽車直線行駛時,后輪的路面輸入與前輪幾乎相同,僅存在一個時間差Δt=L/u,式中:L為軸距。
由于模糊控制具有建模簡單、處理非線性系統(tǒng)適應(yīng)性強以及控制精度高等優(yōu)點,因此已被廣泛運用于半主動懸架系統(tǒng)的控制當中[14]。
在此,基于軸距預(yù)瞄控制和模糊控制理論,結(jié)合CarSim整車動力學(xué)模型,建立了磁流變懸架控制系統(tǒng)。其中,前懸架系統(tǒng)采用反饋模糊控制,考慮到控制目標為垂直加速度以及減振器壓縮速度與阻尼力密切相關(guān),因此以前減振器壓縮位移與壓縮速度作為前懸架模糊控制器的輸入,輸出為磁流變減振器所需電流。對于后懸架系統(tǒng),采用預(yù)瞄模糊前饋控制與反饋模糊控制相結(jié)合的控制方法,前饋控制以前軸的位移傳感器信息,即延時后的前軸垂向位移及速度作為預(yù)瞄模糊輸入信號,輸出為前饋控制電流;反饋控制以后減振器壓縮位移與壓縮速度作為輸入信號,輸出為反饋控制電流。所建立的磁流變懸架控制系統(tǒng)框架如圖4所示。
所設(shè)計的模糊控制器均采用Mamdani推理方法,去模糊化采用面積重心法。反饋模糊子集的隸屬度函數(shù)采用高斯函數(shù),前饋模糊子集的隸屬度函數(shù)采用三角函數(shù),通過懸架的多次仿真分析選取各變量論域及量化因子。用7個語言模糊集來描述輸入輸出量。 其中, 輸入量分為 NB,NM,NS,ZO,PS,PM,PB;輸出量分為 VS,RS,S,M,L,RL,VL。其隸屬度函數(shù)如圖5所示。
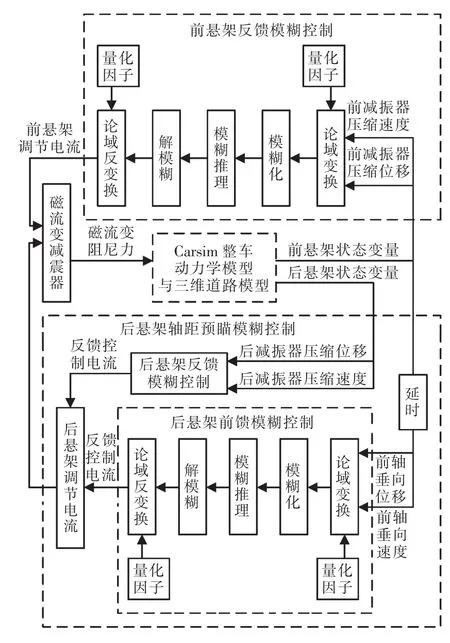
圖4 基于CarSim的磁流變懸架軸距預(yù)瞄模糊控制系統(tǒng)Fig.4 System of wheelbase preview fuzzy controller for magnetorheological suspension based on CarSim
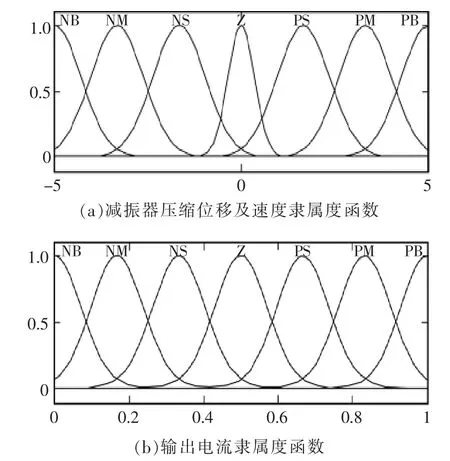
圖5 反饋模糊隸屬度函數(shù)Fig.5 Feedback fuzzy membership function
反饋模糊控制器輸入為減振器壓縮位移及壓縮速度,輸出為減振器電流。其模糊規(guī)則見表1。

表1 反饋模糊控制器規(guī)則Tab.1 Feedback fuzzy controller rules
預(yù)瞄模糊前饋控制器的輸入為前軸垂向位移信號及其速度信號,模糊控制器的輸入、輸出隸屬度函數(shù)如圖6所示。
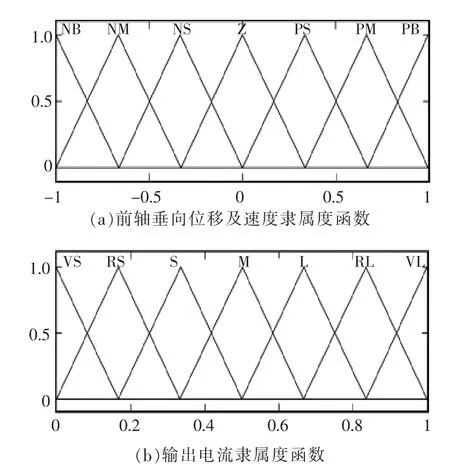
圖6 前饋預(yù)瞄模糊隸屬度函數(shù)Fig.6 Feedforward preview fuzzy membership function
建立兩輸入的模糊控制器的49條模糊規(guī)則見表2。

表2 前饋模糊控制器規(guī)則Tab.2 Feedforward prerview fuzzy controller rules
4 聯(lián)合仿真分析
作為車輛動力學(xué)與控制領(lǐng)域的前沿課題,汽車懸架控制系統(tǒng)的研究與開發(fā)離不開高性能的仿真研究。CarSim作為專業(yè)的車輛動力學(xué)仿真軟件,相比二自由度1/4車輛模型、四自由度半車模型以及七自由度整車模型,更接近于真實車輛,能夠有效可靠地對車輛平順性、操縱穩(wěn)定性等進行仿真。所建立的CarSim整車模型主要參數(shù)見表3。
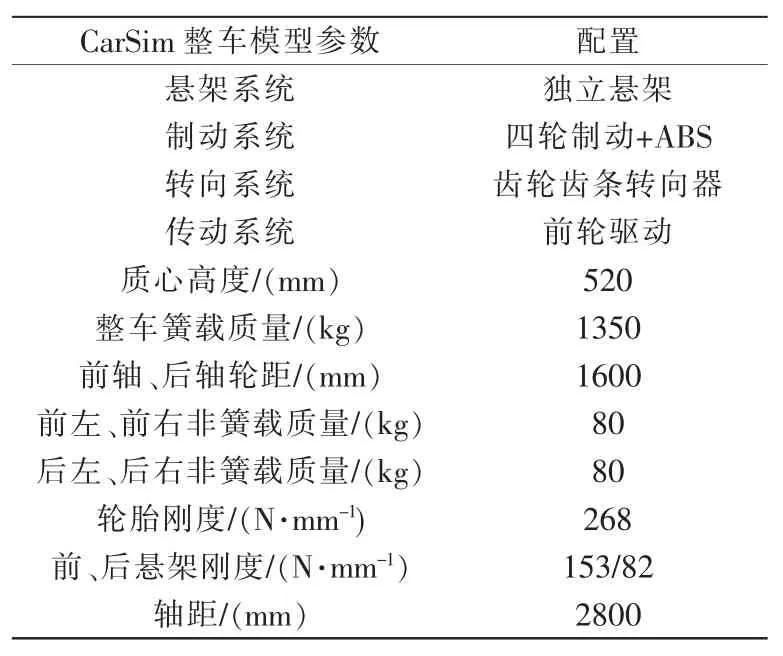
表3 CarSim整車模型主要參數(shù)Tab.3 Main parameters of CarSim whole
建立包括4個減振器壓縮速度及壓縮位移、4車輪中心垂向位移及垂向速度、簧載質(zhì)量質(zhì)心垂向加速度等在內(nèi)的CarSim到Simulink的輸出接口參數(shù),CarSim輸入?yún)?shù)為4個減振器阻尼力,用以進行聯(lián)合仿真控制。在軸距預(yù)瞄模糊控制器的基礎(chǔ)上,加入所建立的磁流變減振器模型、三維道路模型以及CarSim整車動力學(xué)模型,最終建立聯(lián)合仿真模型,如圖7所示。
對所建立的聯(lián)合仿真模型進行仿真研究,Car-Sim車輛模型車速設(shè)置為20 m/s,仿真時間為6 s,三維道路模型為B級道路,以針對車輛的乘坐舒適性和行駛安全性的車身質(zhì)心垂向加速度、俯仰角加速度、減振器動撓度、輪胎變形量作為評價指標。為了對比研究,在相同的仿真環(huán)境下分別對被動懸架、模糊控制懸架進行仿真研究,最終得到的被動懸架、模糊控制懸架、預(yù)瞄模糊控制懸架的車輛質(zhì)心垂向加速度、俯仰角加速度、減振器動撓度、輪胎變形量的時域曲線如圖8-圖10所示。
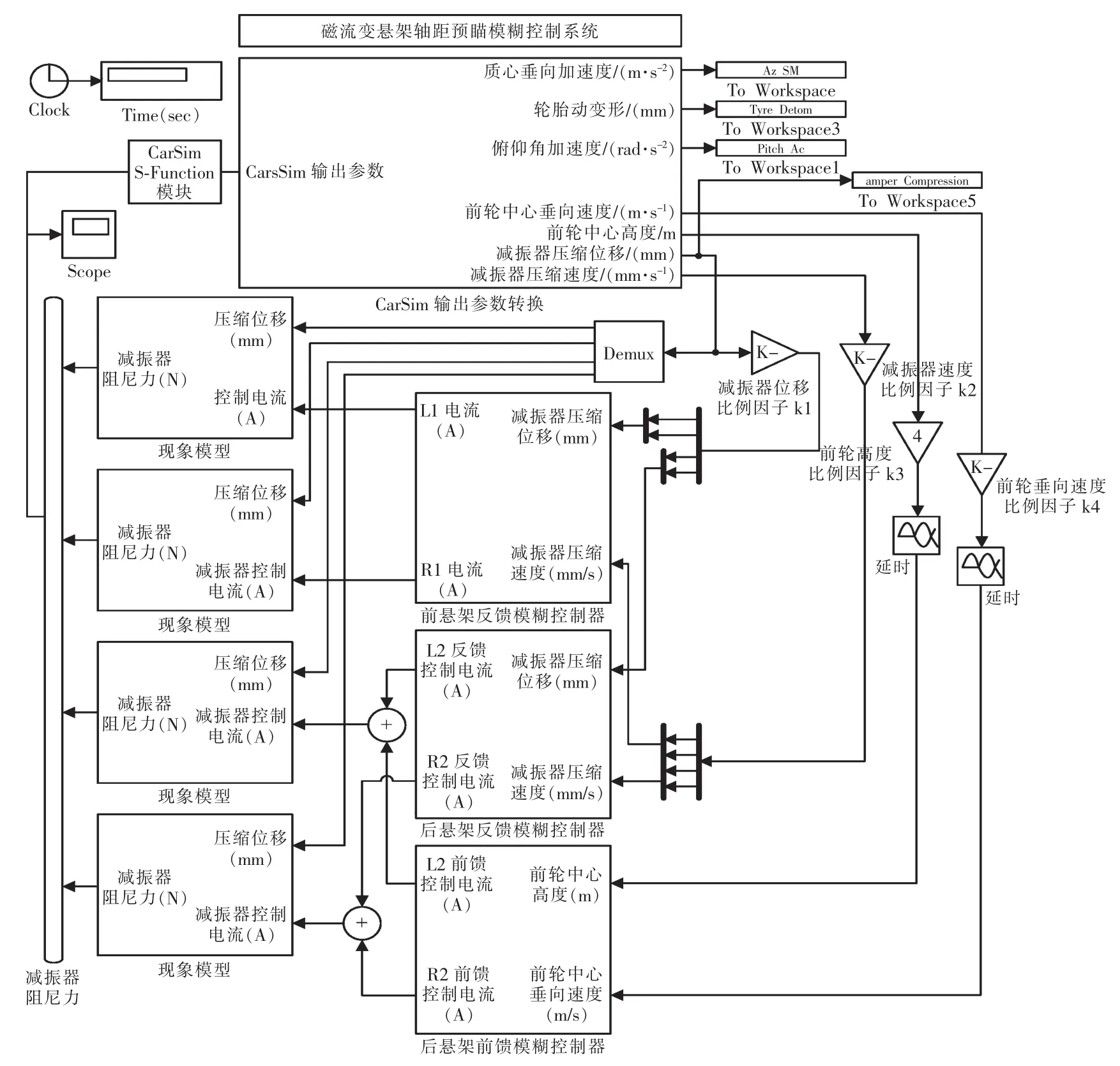
圖7 基于CarSim/Simulink的磁流變懸架聯(lián)合仿真模型Fig.7 MR suspension joint simulation model based on CarSim/Simulink
由仿真結(jié)果時域曲線可見,相對于被動懸架系統(tǒng),模糊控制與軸距預(yù)瞄模糊控制的磁流變懸架系統(tǒng)在車身垂向加速度、俯仰角加速度、懸架動撓度以及輪胎動變形方面均有所改善。對比被動懸架、模糊控制懸架、預(yù)瞄模糊控制懸架3種懸架系統(tǒng)下的仿真結(jié)果數(shù)據(jù)如表4,表5所示。
由表4可知,與被動懸架系統(tǒng)相比,模糊控制懸架系統(tǒng)車身的垂向加速度均方根值及峰值、俯仰角加速度的均方根值分別降低了16.25%,30.88%,13.63%,而俯仰角加速度的峰值雖有所降低,但不明顯。軸距預(yù)瞄模糊控制懸架與被動懸架相比較,前者的車身垂向加速度均方根值及峰值分別降低了28.45%,37.51%;俯仰角加速度均方根值及峰值分別降低了27.41%,15.25%;不同程度地優(yōu)于模糊控制的控制效果,提高了車輛的乘坐舒適性。
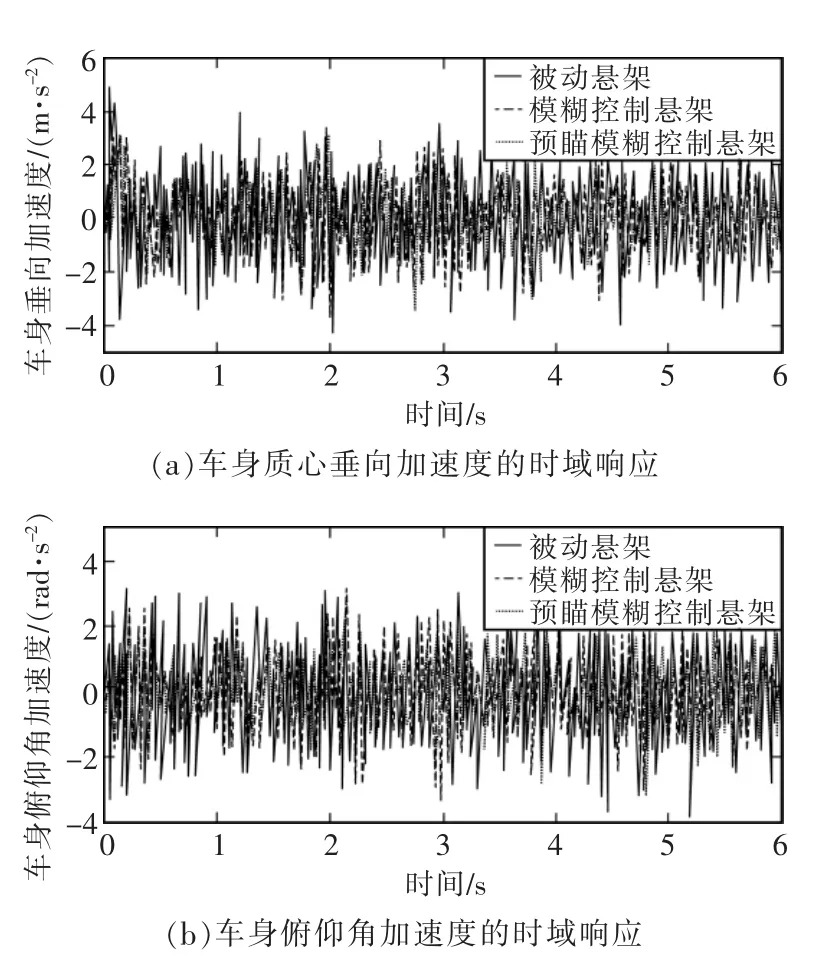
圖8 車身加速度的時域響應(yīng)Fig.8 Time domain response of vehicle body acceleration
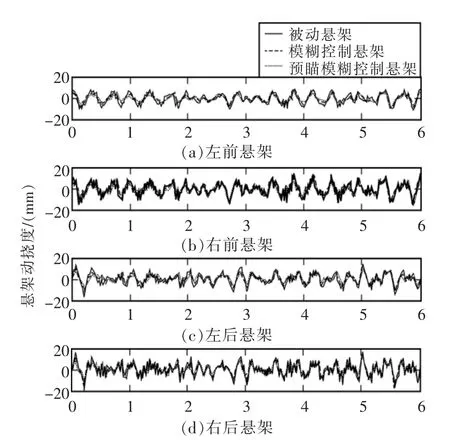
圖9 懸架動撓度的時域響應(yīng)Fig.9 Time domain response of suspensions dynamic deflection
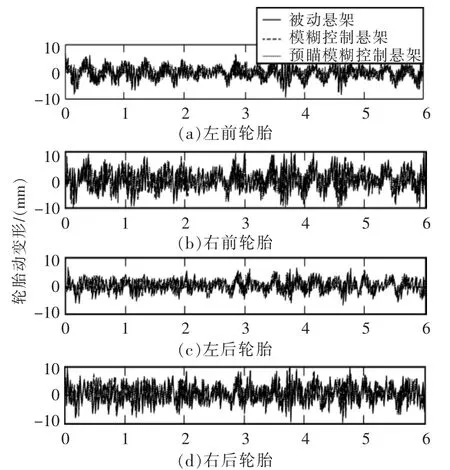
圖10 輪胎動變形的時域響應(yīng)Fig.10 Time domain response of tires dynamic deformation
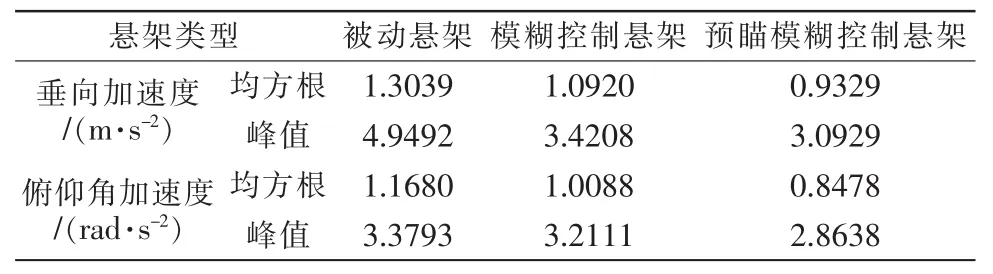
表4 乘坐舒適性數(shù)據(jù)比較Tab.4 Comparison of ride comfort data
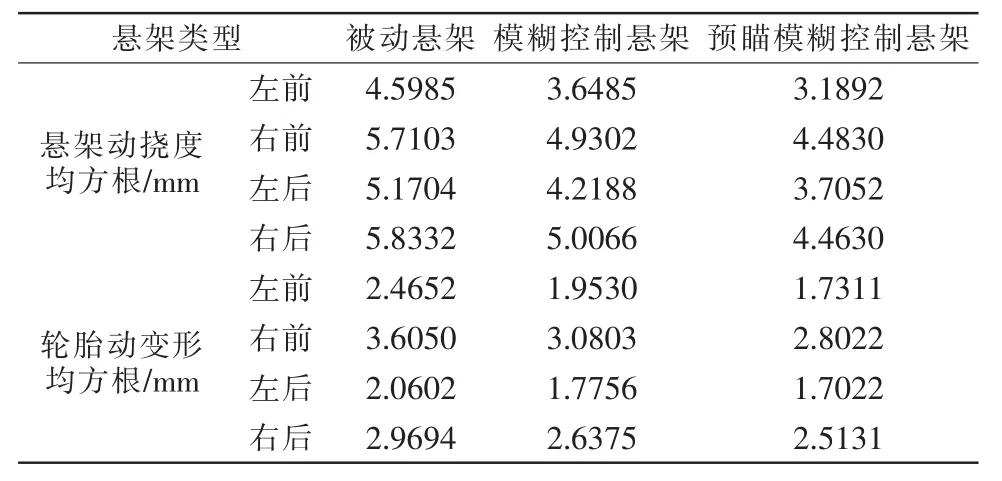
表5 行駛安全性數(shù)據(jù)比較Tab.5 Comparison of driving safety data
由表5可知,與被動懸架相比,模糊控制及預(yù)瞄模糊后整車四懸架動撓度及四輪胎動變形均有所改善。模糊控制懸架四懸架動撓度均方根值分別降低了 20.66%,13.66%,18.40,14.17%;四輪胎動變量均方根值分別降低了20.78%,14.55%,13.81%,11.18%。而軸距預(yù)瞄模糊控制懸架四懸架動撓度均方根值分別降低了30.65%,21.49%,28.34,23.49%;四輪胎動變量均方根值分別降低了29.78%,22.27%,17.38%,15.37%;預(yù)瞄模糊控制在各方面較模糊控制有更優(yōu)的控制效果。
仿真結(jié)果表明,基于軸距預(yù)瞄模糊控制的磁流變懸架系統(tǒng),較好地改善了懸架系統(tǒng)的綜合性能,有效抑制了車身的振動,提高了車輛的乘坐舒適性與行駛安全性。
為了進一步驗證仿真模型及控制策略,所建立如圖11所示的減速帶工況進行仿真研究。
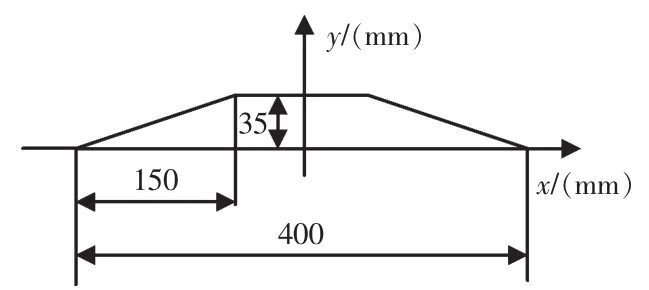
圖11 減速帶截面Fig.11 Sectional of deceleration belt
車輛模型以10 m/s的速度通過減速帶,以相同的仿真環(huán)境分別對被動懸架、模糊控制懸架、軸距預(yù)瞄模糊控制懸架進行仿真研究,仿真結(jié)果如圖12所示。
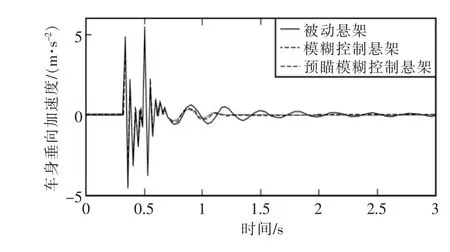
圖12 減速帶工況下簧載質(zhì)量垂向加速度衰減Fig.12 Vertical acceleration attenuation of sprung mass under deceleration belt
由圖可見,在減速帶工況下,相比被動懸架,模糊控制懸架及軸距預(yù)瞄模糊控制懸架的簧載質(zhì)量垂向加速度峰值分別降低了14.49%,23.58%,均能夠有效降低簧載質(zhì)量垂向加速度峰值,并且加快了車身簧載質(zhì)量的振動衰減。同時,軸距預(yù)瞄模糊控制能夠在模糊控制的基礎(chǔ)上對車身的振動的控制上做進一步改善,有效減緩了減速帶對車輛的沖擊。
5 結(jié)語
利用CarSim與Simulink聯(lián)合建模仿真的方法,建立了基于現(xiàn)象模型的磁流變減振器模型、更接近于真實車輛的CarSim整車動力學(xué)模型以及三維道路模型。基于模糊控制與軸距預(yù)瞄控制理論,設(shè)計了前懸架模糊控制和后懸架模糊前饋與反饋的軸距預(yù)瞄模糊控制的磁流變半主動懸架控制系統(tǒng)。聯(lián)合仿真結(jié)果表明,與被動懸架及模糊控制懸架相比,軸距預(yù)瞄模糊控制的懸架在車輛乘坐舒適性方面,車身垂向加速度、俯仰角加速度均有顯著降低;在行駛安全性方面,懸架動撓度及輪胎動變形也有明顯改善,有效抑制了車身的振動,提高了車輛的乘坐舒適性與行駛安全性。
[1]Karnopp D,Crosby M J,Harwood R A.Vibration control using semi-active force generators[J].ASME Journal of Engineering for Industry,1974,96(2):619-626.
[2]Savaresi S M.Semi-active suspension control design for vehicles[M].[s.l.]:Elsevier Ltd,2010:9.
[3]朱華.半主動懸架及其控制策略研究綜述[J].汽車零部件,2009,4(2):75-77.
[4]Li P,Lam J,Cheung K C.Multi-objective control for active vehicle suspension with wheelbase preview[J].Journal of Sound and Vibration,2014,333(21):5269-5282.
[5]貝紹軼,袁傳義,陳龍,等.基于軸距預(yù)瞄的半主動懸架模糊神經(jīng)網(wǎng)絡(luò)控制[J].汽車工程,2010,32(12):1067-1070,1082.
[6]Wong Pakkin,Xie Zhengchao,Wong Hangcheong,et al.Design of a fuzzy preview active suspension system for automobiles[C]//IEEE System Science and Engineering,Macau,China.2011.
[7]Ahmed M,Svaricek F.Preview control of semi-active suspension based on a half-car model using fast fourier transform[C]//IEEE Systems,Signals&Devices(SSD),Hammamet,Tunisia.2013.
[8]鄧志黨,高峰,劉獻棟,等.磁流變阻尼器力學(xué)模型的研究現(xiàn)狀[J].振動與沖擊,2006,25(3):121-126,211.
[9]Spencer B F,Dyke S J.Phenomenological model for magnetorheological dampers[J].J of Eng Mech,1997,123(3):230-238.
[10]余志生.汽車理論[M].北京:機械工業(yè)出版社,2009.
[11]吳志成,陳思忠,楊林,等.基于有理函數(shù)的路面不平度時域模型研究[J].北京理工大學(xué)學(xué)報,2009,29(9):795-798.
[12]李鵬飛,馮國勝,鄧曉龍,等.三維虛擬路面的諧波重構(gòu)[J].汽車工程師,2014,41(11):24-27.
[13]Bender E K.Optimum linear preview control with application to vehicle suspension[J].ASME Journal of Basic Engineering,Series D,1968,90(2):213-221.
[14]支龍,昌放輝,陳立平,等.汽車半主動懸架的ADAMS和MATLAB 聯(lián)合仿真[J].自動化與儀表,2004,24(6):45-47.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
