基于無通道保護的高速鐵路10 kV電力貫通線故障隔離方法研究
2018-01-26 07:21:36溫曼越
鐵道標準設計 2018年3期
溫曼越
(中鐵第四勘察設計院集團有限公司,武漢 430063)
10 kV電力貫通線為鐵路車站、沿線通信信號以及其他非牽引電氣設備供電,具有線路較長、接入負荷點多、地理條件差、易發生故障等特點。快速準確地隔離故障區段,恢復非故障區域供電是鐵路安全可靠運行的根本保障。但是目前針對高速鐵路電力貫通線的繼電保護和故障區段隔離方案并不具有選擇性,如現有的保護裝置僅安裝在線路的首端,在線路任何位置發生故障后,保護跳閘將使全線停電,使得故障影響范圍大,極大降低了故障查找和恢復供電的效率。因此,電力貫通線路迫切地需要一個快速可靠的故障區段隔離方案,使得現有的問題得以解決,在故障后不僅能夠快速識別故障,同時能夠快速切除故障區段,避免了人工拉合閘導致的非故障區間失電,提高故障查找和恢復供電的效率,保證電力貫通線的供電可靠性。
由于三段式的電流保護或距離保護難以取得較好的選擇性,國內外學者提出了相繼速動保護[1]和無通道保護方案[2]。無通道保護是自適應保護的一種,其基本思想是利用對側開關動作信息判斷故障發生在保護區內或區外,從而決定是否加速本端保護動作,依靠單端量取得縱聯保護的效果[3-5]。中低壓配電系統中一般采用基于工頻量的無通道保護。配電線路無通道保護方案[6]利用一端保護先動作跳閘后,另一側保護檢測故障動作跳閘產生的單端工頻電氣量的變化,來獲取線路對端斷路器的動作情況,在區內故障時實現相繼速動。但在某些系統參數和故障類型下,電流的工頻突變量微弱,導致判據靈敏度不足,存在死區問題[7,8]。對此,文獻[9]提出利用對側開關動作后出現的零序和負序電流變化的故障信息,構成瞬時動作模式和延時動作模式,提高了保護判據的靈敏度。文獻[10]通過加速阻抗圓檢測對側保護動作,測量阻抗位于加速阻抗圓內時,保護加速動作。文獻[11]結合行波和阻抗信息的變化來區分故障發生時刻與對側斷路器的動作時刻,以判斷對側保護的動作情況。
以上無通道保護方案在輸配電網中已經有相對成熟的研究,但在鐵路電力貫通線中的應用研究幾乎沒有。因此本文將無通道保護應用到電力貫通線中,并設計相應的備用電源自動投入模塊,使其在故障后不僅能夠快速識別故障,同時能夠切除故障區段,可極大提高電力貫通線的供電可靠性。
1 基于無通道保護的電力貫通線故障隔離方案
如圖1所示,B1-B12和R1-R12分別為安裝在線路中的斷路器和繼電器。在單斷路器配置的線路中,要從兩端同時切除故障,每個繼電器需要根據潮流方向和故障方向的不同,判斷故障發生在斷路器的哪一側,投入不同的保護動作模式。如果故障處于電源側,則繼電器位于負荷側,投入負荷側對應的定時限動作模塊——低電壓保護DUV(Directional Under Voltage)和加速動作模塊——加速低壓低流保護ADCUV (Accelerated Directional Under Current Under Voltage);如果故障位于無電源側,則繼電器位于電源側,投入電源側對應的定時限動作模塊——過電流保護OC(Over Current)和加速動作模塊——加速過電流保護AOC[6](Accelerated Over Current)。

圖1 基本無通道故障隔離方案時限配置
當故障k1發生在編號為2的區段上時,繼電器R2檢測到潮流方向和故障方向都為正向,因此為電源側繼電器,投入OC(t=0.9 s)和AOC(0.3~0.4 s)模塊;繼電器R3檢測到正向潮流方向,但故障方向為反,因此位于負荷側,投入DUV(t=0.3 s)和ADCUV(1.9~2.0 s)模塊。比較而知,R3的DUV模塊的動作時間最短,因此在0.3 s斷開,將編號2之后的區段隔離,因此R4至R12將返回不動作。然而R3之前的故障未被隔離,因此繼電器R2的AOC模塊在0.3~0.4 s的時間窗內檢測到非故障相電流的突變,判斷出R3已經在0.3 s動作,因此在0.4 s加速跳開,至此故障區段被完全隔離。
依此類推,當故障k3發生在編號為11的區段上時,R11的OC模塊和R12的ADCUV模塊先后動作,在0.2 s時切除故障區段;而當故障k2發生在編號為7的區段上時,則需在長達1.0 s時才能切除故障區段。
因此,雖然無通道保護方案對首端和末端區段故障的切除時間較短,但對于中間部分的區段故障切除時間過長。電力貫通線采用小電阻接地,發生接地故障時通常故障電流很大,故障電流存在的時間越長,對系統的危害越大。因此為了保證系統運行的可靠性,對于線路中間段應提出使故障切除時間更短的方案。
2 基于單端故障測距的電力貫通線故障隔離改進方案
為了能夠從兩側切除故障,減小中間段故障隔離時間,針對故障切除時間較長的中間區段,即線路的1/3至2/3范圍內的保護裝置,增加DIS(Distance)保護模塊的配置,DIS模塊根據本端測得的三相電壓電流數據判斷故障距離。故障發生時,DIS模塊在電源側啟動,依據單端故障測距的結果,判定故障是否在本端保護范圍內,以決定是否加速本端保護的動作[12]。
2.1 單端故障測距算法
假設故障阻抗Zf為純電阻[13],則故障點處Zf的虛部為零,即
(1)

(2)

(3)

(4)
式中,UA、IA分別為測得的A相電壓和電流;Zr為線路單位阻抗;I0為線路零序電流;K為零序電流補償系數[14];z0和z1分別為線路單位長度的零序和正序阻抗。
故障阻抗可以表示為
(5)
故障距離x可以表示為
(6)
由此可見,隨著故障電阻Rf的增大,故障測距結果x將呈現比實際故障距離偏小的誤差。
2.2 加速動作判據
(1)DIS(Distance)模塊動作判據
DIS模塊的啟動判據與AOC模塊相同;加速判據為故障測距的結果Ld在保護范圍xd之內,即
Ld≤xd
(7)
xd為本區段DIS模塊的保護范圍,由于在上一小節中證明測距方法會導致偏小的測距結果,因此設置保護范圍xd為所保護區段的全長。
為保證動作的選擇性,使非故障區段的加速動作模塊在時間窗內不會誤動,DIS的動作時限需避開OC以及DUV模塊的動作時限。由于OC模塊和DUV模塊的動作時限分別為
tOCm=0.1[2M-(2m-1)]
(8)
tDUVm=0.1(2m-1)
(9)
式中,m為斷路器編號;M為斷路器總個數。
因此設置DIS的動作時限從母線到線路方向依次減小,即
tDISm=0.1(2M-2m)
(10)
因此對負荷側的ADCUV模塊增加對應于DIS模塊動作時限的動作時間窗,該時間窗τ設定為以對側DIS模塊動作時限為基準的100 ms,即0.2~0.3 s、0.4~0.5 s、0.6~0.7 s等。如圖2所示,對于加速區段的ADCUV模塊,會配置兩個動作時間窗,λ1對應于DIS模塊的動作時限,λ2對應于原有的無通道保護方案OC模塊的動作時限(作為備用)。DIS模塊或者OC模塊動作后,對應的ADCUV模塊都能夠在對應時間窗內檢測到三相電壓和電流的降低,加速動作切除故障區段。

圖2 ADCUV模塊動作時間窗示意
(2)保護超越分析

(11)
這樣可能導致加速區段末端故障時DIS模塊拒動,因此需配合保護裝置內同時啟動的OC模塊,在DIS模塊拒動時切除故障。
2.3 改進方案保護構成與動作邏輯
由于備自投的投入會導致線路潮流方向發生變化,因此由潮流方向和故障方向元件同時決定繼電器啟用電源側或是負荷側的動作模塊[15]。具體保護結構如圖3所示。

圖3 改進方案保護構成
ADCUV模塊和AOC模塊的動作流程如圖4所示。故障發生時,各模塊根據故障與潮流的方向判定位于負荷側還是電源側,并相應投入ADCUV模塊或者AOC模塊。為防止保護的誤啟動,設置啟動計數器。在滿足啟動判據后,AOC或ADCUV模塊啟動計數,若在規定的時間窗內滿足加速判據,則跳閘斷開相應的斷路器,否則返回不動作;若ACDUV模塊位于加速區段,則返回后再次啟動計數,若在下一個時間窗內檢測到三相電流和電壓接近于零,則跳閘斷開相應的斷路器,否則返回不動作。

圖4 加速保護模塊動作流程
2.4 備自投單元投入判據
備自投UV(Under Voltage)模塊的動作判據通常為[16]
(12)
t=Tmax+Δt
(13)
式中,Ua、Ub、Uc為三相電壓有效值;Uset為故障整定電壓,通常設置為額定電壓的30%;t為模塊動作時間,必須考慮系統中保護的最大動作時間Tmax;Δt為動作時級差,同樣取為0.2 s。
當發生不對稱故障時,若負荷側先動作,則已將備自投模塊與故障點之間的區段隔離,無需等待故障區段被完全隔離,備自投UV模塊即可合閘供電。因此,新增UV模塊的啟動判據為將三相同時失壓變為三相中任意一相的失壓[17]
(14)
t2=Tmax2+Δt
(15)
式中,N為每個周期采樣數;Up(n-2N)為2個周期前電壓有效值;Up(n)為當前周期電壓有效值,下標P代表三相中的任一相。
發生故障時,UV模塊與線路上DUV模塊同時啟動,其延時時間t2只需比負荷側DUV模塊的最長動作時間Tmax2高一個時間階梯Δt即可。
無通道保護對對稱故障的處理,應首先保證故障切除的快速性。提出的不依賴通信的故障隔離方案,在對稱故障發生時從首端無選擇性瞬時切除故障。因此,為使得備自投裝置識別三相的失壓是由不對稱故障時負荷側斷路器跳閘引起還是三相對稱故障引起的,在以上判據的基礎上,增加一個不對稱故障判據[18]
(16)
在同時滿足式(14)和式(16)的情況時,UV模塊才可以啟動,使得備自投(BZT)不會再次重合于對稱故障上。
在無通信模式下,UV模塊的動作判據分別根據故障區段電源側或者負荷側的先后動作順序設定為:(1)電源側先動作,UV模塊需等待負荷側動作后再投入,因此需在到達延時時間t3時動作;(2)負荷側先動作,則UV模塊只需在檢測到任一相失壓后,與線路上DUV模塊同時啟動,到達延時時間t2時動作。綜上所述,備自投UV模塊動作邏輯圖如圖5所示。

圖5 備自投UV模塊動作邏輯圖
3 仿真分析
3.1 模型搭建
根據實際參數搭建全電纜電力貫通線仿真模型,在MATLAB/SIMULINK軟件中仿真驗證本方案的正確性和有效性。如圖6所示,對于配置12個保護裝置的電力貫通線,加速區間編號為5-8的區段,在此區間內使用基于單端故障測距的加速方案隔離故障區段。設置故障電阻為10 Ω,采樣頻率為1 kHz,對各電氣量基波相量的提取采用傅里葉變換[19]。

圖6 加速無通道故障隔離方案時限配置
3.2 加速區段故障分析
如圖6所示,設置在編號為8的區段上距離繼電器R8 0.916 km處于0.135 s發生B相接地短路故障,繼電器R8檢測到潮流方向和故障方向都為正向,因此為電源側繼電器,投入OC(t=0.7 s)和AOC(t為1.5~1.6 s)以及DIS(t=0.2 s);繼電器R9檢測到正向潮流方向,但故障方向為反,因此位于負荷側,投入DUV(t=1.5s)和ADCUV(t為0.2~0.3 s和0.7~0.8 s)。R5-R8繼電器同時啟動DIS模塊進行故障測距,但是R5-R7繼電器檢測到故障位于保護范圍之外,而R8的DIS模塊檢測故障距離為0.912 km,位于保護范圍的2.86 km之內,比較而知,R8的DIS模塊的動作時間最短,因此在0.335 s斷開,將編號為8的區段之后的區段隔離。R1至R7檢測到三相電流恢復正常,返回不動作。繼電器R9的ADCUV模塊在0.335~0.435 s的時間窗內檢測到三相電壓和電流的有效值均接近于零,判斷出R7已經在0.335 s動作,因此在0.435 s加速跳開,至此故障區段被完全隔離,本區段故障切除時間由0.8 s縮短至0.3 s。DIS模塊和ADCUV模塊的響應波形分別如圖7和圖8所示。

圖7 R8的DIS模塊響應
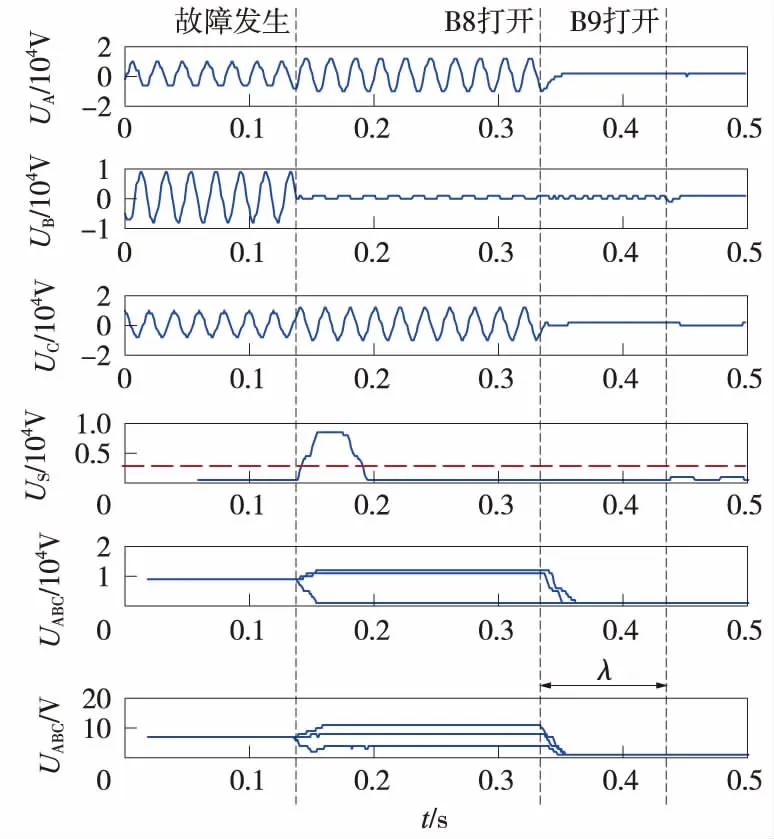
圖8 R9的ADCUV模塊響應
相同故障條件下改變故障發生位置,當故障發生在編號為8的區段上距離繼電器R8 0.12 km時,繼電器R7和R8的DIS模塊動作判據如圖9所示。由圖9可見,R7的保護范圍為1.726 km,測距結果為1.721 km;繼電器R8的保護范圍為2.86 km,測距結果為0.1 km,都在對應的保護范圍之內,而R8的DIS模塊動作時間(t=0.2 s)小于R7的DIS模塊動作時間(t=0.4 s),因此0.335 s時斷路器B7動作隔離故障區段,R8則返回不動作。

圖9 R7和R8的DIS模塊動作判據
以下分析故障點k2被隔離之后,備自投UV模塊的響應。B相接地故障在0.135 s時發生,R8的DIS模塊在0.335s時動作,R9的ADCUV模塊在0.535 s時動作,隔離故障區段。t=Tmax+Δt=(0.1+0.2) s=0.3 s,從R8動作的0.335 s時檢測到滿足動作判據,因此UV模塊啟動計時,應在0.635 s時動作;t2=Tmax2+Δt=(0.7+0.2) s=0.9 s,在故障發生的0.135 s時檢測到滿足動作判據開始計時,應在1.035 s時動作。比較而知t2動作時間較短,如圖10所示,備自投UV模塊在0.635 s時動作,恢復R9之后的非故障區段的供電。UV模塊投入后,R9之后的非故障區段的潮流方向將反向,因此各模塊的整定值和時限也應當重新配置,如圖11所示。
若k2點處的故障為三相短路故障,則如圖12所示,在0.135 s發生故障后,首端繼電器R1的OC模塊檢測到三相故障發生,瞬時無選擇性動作切除故障。考慮到合閘初期變壓器勵磁涌流的影響,設定動作延時為60 ms。因此OC模塊在0.195 s時動作切除故障時,備自投UV模塊雖然滿足兩個啟動判據,但發現系統不存在負序電流,不滿足不對稱故障判據,因此經過t=Tmax+Δt=(0.1+0.2) s=0.3 s后,在0.495 s時不會投入動作,以免造成三相短路故障的再次發生。
3.3 改進方案加速效果分析
經過大量仿真分析,改進方案與原故障隔離方案的故障隔離時間如圖13所示。可見在配置12個保護裝置的線路中,最長故障區段切除時間由1.1 s縮短至0.7 s,其中區段8的切除時間由0.8 s縮減至0.3 s(圖13中加速效果2)。因此,在基本無通道保護方案使得故障區段的最大故障隔離時間縮短一半的前提下,基于單端測距的故障隔離加速方案進一步縮短了中間區段故障的隔離時間。對于配置更多保護裝置的線路,則故障隔離時間的加速效果會更加明顯。
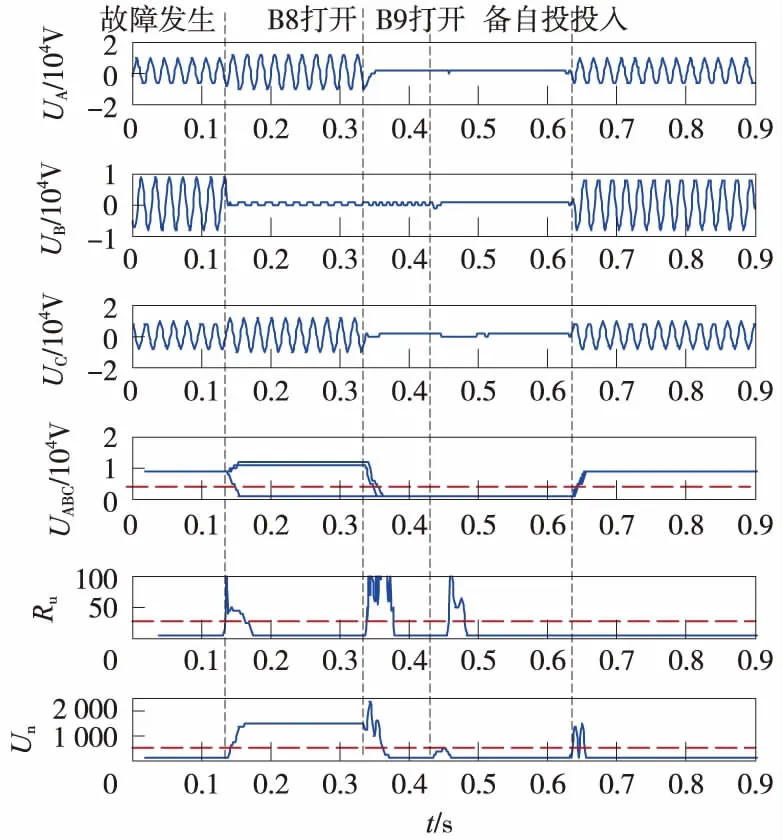
圖10 不對稱故障時備自投UV模塊響應

圖11 備自投投入后各模塊時限配置方案

圖12 對稱故障時備自投UV模塊響應

圖13 兩種方案故障隔離時間對比
4 結論
設計了基于無通道保護原理的電力貫通線故障區段隔離方案,通過單端故障測距對保護動作時限進行加速,解決了原無通道保護方案對貫通線路中間段故障隔離時間過長的問題。針對提出的無通信條件下故障區段的隔離方案,研究了相應的備用電源自動投入方案,實現了故障區段被隔離后非故障區段供電的快速恢復,保證了電力貫通線運行的穩定性與可靠性。仿真驗證了該方案的可行性。
[1] Pei L, Deshu C, Hua P, et al. Analysis of an accelerated trip scheme for faults in the second zone of protection of a transmission line[J]. Power Delivery, IEEE Transactions on, 1990,5(1):72-78.
[2] Bo Z Q. Adaptive non-communication protection for power lines BO scheme. II. The instant operation approach[J]. Power Delivery, IEEE Transactions on, 2002,17(1):92-96.
[3] Darwish H A, Kawady T A, Taalab A M I, et al. Robust non-communication line protection scheme using novel quantities[C]. Power Engineering Society General Meeting, IEEE, 2006.
[4] Sharafi A, Sanaye-Pasand M, Jafarian P. Non-communication protection of parallel transmission lines using breakers open-switching travelling waves[J]. IET Generation Transmission & Distribution, 2012,6(1):88-98.
[5] Dong X, Shi S, Wang B, et al. Feeder automation system based on non-communication protection and control unit[C]. Power & Energy Society General Meeting, 2009. PES ’09. IEEE. IEEE, 2009:1-7.
[6] 董新洲,施慎行,王賓,等.新型配電線路自動化模式[J].電力系統及其自動化學報,2007(3):1-7.
[7] 侯喆,張艷霞,戴劍鋒.基于小波理論的全線相繼速動保護方案[J].電力系統自動化,2003,27(9):54-57.
[8] 石鐵洪,張昊,劉沛.小波變換在全線相繼速動保護中的應用[J].電力系統自動化,2001,25(2):36-39.
[9] 李志雷,張舉,陳少偉,等.輸電線路無通道保護[J].電力系統保護與控制,2006,34(3):5-8.
[10] 張舉,李志雷,王興國,等.一種基于加速阻抗圓的無信道保護方法[J].電網技術,2006,30(2):75-79.
[11] Aguilera C, Orduna E, Ratta G. Adaptive noncommunication protection based on traveling waves and impedance relay[J]. IEEE Transactions on Power Delivery, 2006,21(3):1154-1162.
[12] 溫曼越.高速鐵路10 kV電力貫通線故障自動隔離方法研究[D].成都:西南交通大學,2016.
[13] 施世鴻.高壓輸電線路故障測距研究[D].杭州:浙江大學,2008.
[14] 張保會,尹項根.電力系統繼電保護[M].北京:中國電力出版社,2005:30-32.
[15] 張梅,董新洲,薄志謙,等.實用化的配電線路無通道保護方案[J].電力系統自動化,2005,29(12):68-72.
[16] Yin D, Liu K, Dong X, et al. Distribution line automation system based on non-communication protection in the case of symmetrical fault[C]. Advanced Power System Automation and Protection (APAP), 2011 International Conference on. IEEE, 2011:659-662.
[17] 劉琨,董新洲,薄志謙.適用于配電線路無通道保護的備用電源自動投入裝置[J].電力自動化設備,2013,33(6):147-151.
[18] 劉琨,董新洲,施慎行,等.對稱故障下基于無通道保護的配電線路自動化[J].清華大學學報(自然科學版),2011,51(11):1652-1657.
[19] 楊奇遜,黃少鋒.微型機繼電保護基礎[M].3版.北京:中國電力出版社,2007:87-99.
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50