機器人手靈巧操作中變接觸點的幾何求解方法
2018-01-26 09:27:20王耀飛趙京東
傳感器與微系統(tǒng) 2018年2期
王耀飛,趙京東
(哈爾濱工業(yè)大學 機器人技術與系統(tǒng)國家重點實驗室,黑龍江 哈爾濱 150001)
0 引 言
靈巧手的靈巧操作[1]過程中,為了實現(xiàn)被操作對象的位姿改變,靈巧手與被操作對象間相對位置關系必然發(fā)生變化,對應的靈巧手與物體的接觸點也將發(fā)生變化,準確檢測出接觸點位置和接觸力對于操作任務的完成具有重要的意義,文獻[2]中利用觸覺傳感器設計了一種智能操作手柄,文獻[3]通過在特定操作物體上貼裝觸覺傳感器識別被操作物體上的接觸點和接觸力,文獻[4]對于操作中接觸面為凹面的接觸問題專門設計了觸覺傳感器檢測接觸位置和接觸力,文獻[5]對觸覺傳感器在機器人操作中的應用有更全面的論述。
為了實現(xiàn)接觸點的位置和接觸力檢測,除了觸覺傳感器,更為簡單的一種方法是將靈巧手操作中接觸點簡化為固定[6]模型,即可僅由關節(jié)轉角和關節(jié)所受力矩確定接觸力。本文就固定接觸點模型的誤差進行了分析,并通過幾何分析,建立了更為精確的接觸點求解算法。
1 固定接觸點的誤差分析
如圖1所示,手指在模擬將“鑰匙”送出過程中,隨著“鑰匙”不斷推出,手指的位姿不斷變化,而接觸點也由P1變化到P3。
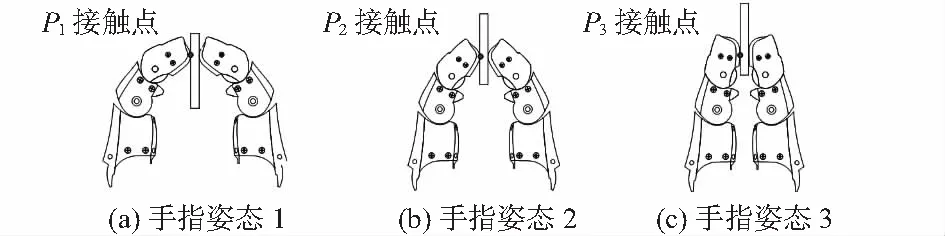
圖1 靈巧手模擬塞鑰匙靈巧操作示意
靈巧操作過程中,如果不考慮接觸點改變將至少在2個方面影響操作甚至導致操作任務失敗:1)操作中的位移誤差。如圖2所示,手指對物體一次平移操作中,初始接觸姿態(tài)下手指上F2與目標物體O2重合,而操作完成后的接觸姿態(tài)下手指上F1與目標物體O1重合。不考慮接觸面發(fā)生滑動的情況下,CAD測量出物體實際向下平移了70的距離,而手指上F1,F(xiàn)2的移動距離均不是目標物體實際移動距離,而且手指上這兩點的移動軌跡均為不規(guī)則的曲線,而不是目標物體實際走過的一條豎直直線。因而靈巧手靈巧操作中必須考慮接觸點變化,按照實際的變接觸點規(guī)劃靈巧手操作軌跡,才能實現(xiàn)精準的靈巧操作。2)操作中的接觸力誤差。
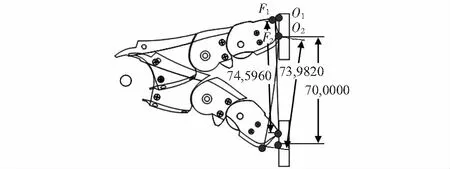
圖2 靈巧操作中定接觸點的位移誤差
圖3所示為DLR/HIT II靈巧手[7]末端剖面,圖中手指內部1#部分為彈性體,該彈性體中間支柱兩側貼有應變片,實際對接觸力的測量是將該彈性體受到的力矩轉換為某個固定的理想接觸點,隨著靈巧操作的接觸點變化,定接觸點模型的接觸力算法必然導致接觸力誤差。如圖所示,若以F'的作用點作為固定的理想接觸點來計算實際接觸力F的大小,由力矩關系知,算法必然導致接觸力計算值的偏小,即導致實際靈巧手對目標物體施加過大的作用力,而對于相對于靈巧手較脆弱的目標,可能導致目標的破壞。
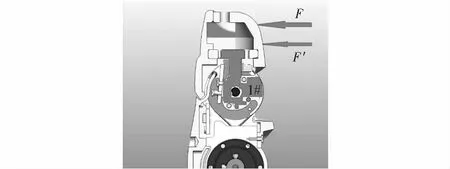
圖3 靈巧操作中定接觸點的接觸力計算誤差
由此可見,靈巧手靈巧操作中變接觸點的分析與模型的建立具有重要的意義。當前研究中多采用觸覺傳感器來直接測量出接觸點和接觸力,但由于觸覺傳感器采用點陣式離散分布[8~10],若間隙較大,在剛性接觸下會出現(xiàn)無法準確檢測接觸點和接觸力的問題,如圖4所示。
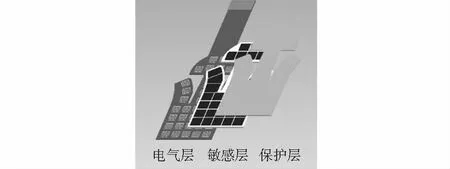
圖4 觸覺傳感器的離散分布
2 剛性接觸下接觸點求解算法
2.1 剛性接觸下接觸點的數(shù)學描述
如圖5所示建立操作空間的笛卡爾坐標系Ow,手指的笛卡爾坐標系Of,手指末端關節(jié)的笛卡爾坐標系Ot,在指尖坐標系中建立接觸面輪廓曲線{ft(x,y)},并在操作空間坐標系中建立目標物體的接觸面輪廓曲線{gw(x,y)}。
假定兩個輪廓曲線對于其外部空間均為凸函數(shù),而實際中靈巧手接觸面輪廓對外部空間大部分的確是凸函數(shù),現(xiàn)實中大部分被操作對象的輪廓面對外部空間也多為直線或凸函數(shù)(直線并不影響接下來的分析)。
設Of坐標系到Ow坐標系的變換矩陣Twf,Twf中的系數(shù)由操作空間中靈巧手的位姿決定,而在僅依靠靈巧手實現(xiàn)的靈巧操作中,手臂不發(fā)生位置變化,因而該變換矩陣系數(shù)均為常數(shù)。
設Ot坐標系到Of坐標系的變換矩陣Tft,Tft中的6個系數(shù)由靈巧手手指各個關節(jié)角度決定,本文靈巧手手指為三連桿機構,且末關節(jié)連桿與中間關節(jié)采用1︰1耦合運動,因而,該坐標變換由基關節(jié)俯仰角θ1和末關節(jié)俯仰角θ3完全決定。
設Ot坐標系中輪廓曲線{ft(x,y)}上一個點P坐標為[xt,yt,1]T,則操作空間Ow坐標系下該點坐標為[xw,yw,1]T,則有
(1)
經過以上坐標變換后,便可以得到操作空間下指尖外輪廓曲線{fw(x,y)},因而靈巧手操作中剛性接觸下接觸點數(shù)學模型可以描述為:
空間坐標系下,手指以一定關節(jié)角度與目標物體發(fā)生接觸,將該接觸形態(tài)沿水平方向(或豎直方向)拉開一定距離,由手指接觸面形成輪廓曲線{fw(x,y)},由目標物體接觸面形成輪廓曲線{gw(x,y)},2個曲線水平(或豎直)距離最小的兩個點即為剛性接觸點。
由凸函數(shù)性質可知,當這兩個曲線對其外部空間均為凸函數(shù)(或其中一個曲線為直線應一個為凸函數(shù))時,剛性接觸點有且僅有一個,把其定義為剛性接觸點P1。
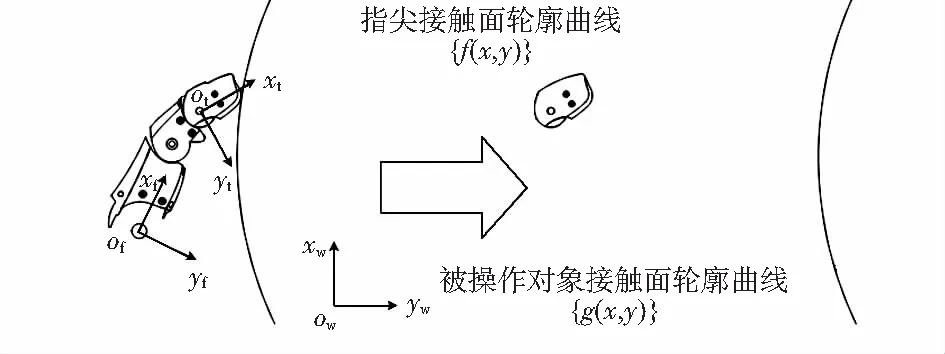
圖5 剛性接觸點的數(shù)學描述
2.2 剛性接觸點的二分法求解
若在接觸形態(tài)下2個輪廓曲線沿水平方向拉開一定距離,輪廓曲線1{fw(x,y)}和輪廓曲線2{gw(x,y)}分別為
(2)
(3)
取ymin和ymax分別為
ymin=max{min{yf 11,yf 21,yf 31,…},
min{yg 11,yg 21,yg 31,…}}
(4)
ymin=min{max{yf 12,yf 22,yf 32,…},
max{yg 12,yg 22,yg 32,…}}
(5)
根據凸函數(shù)性質可知,兩個沿水平方向拉開的凸曲線間距d沿豎直方向構成了凸函數(shù),因而求解d的最小值可采用二分法。具體迭代算法可用圖6描述。

圖6 二分法求解剛性接觸點
3 仿真與結果分析
首先求出手指輪廓曲線,由于本文研究大量借助計算機的運算,因此,并未采用曲線擬合求曲線解析式,而是直接在手指的PRO—E模型剖面圖中量出離散的48個點坐標(為了更高精度可以離散出更多的點進行求解),參考系為手指末端關節(jié)的笛卡爾坐標系Ot,如圖7所示。
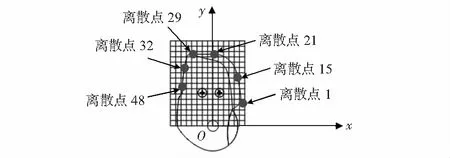
圖7 手指接觸輪廓曲線離散化
如圖8建立坐標系,其中Oa為靈巧手所在手臂的末端坐標系,可知,接觸點的求解可以根據接觸時兩個接觸輪廓拉開一定距離而變成求最小距離的問題,而圖中被操作對象輪廓為一直線,因而,沿豎直方向拉開一定距離后,手指輪廓曲線再沿水平方向平移不影響接觸點的求解,實驗中,手指輪廓曲線的x,y坐標對求解毫無影響,只由輪廓曲線的旋轉角度φ決定,有
φ=α+θ1+2·θ3
(6)
式中α為靈巧手所在手臂坐標系旋轉角度;θ1為DLR/HIT II五指靈巧手手指基關節(jié)俯仰角;θ3為DLR/HIT II五指靈巧手手指末關節(jié)俯仰角。
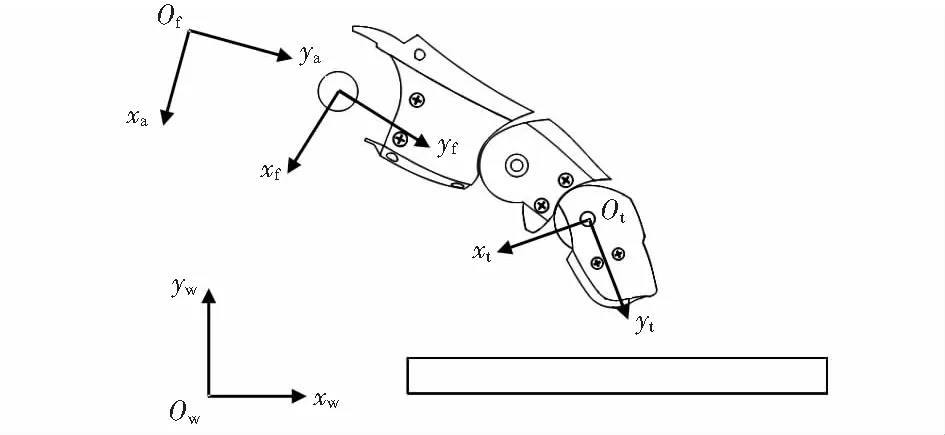
圖8 靈巧手平面操作的坐標系建立
由于靈巧手操作為手內操作,手臂不運動,φ完全由手指各關節(jié)角度決定,亦即手指末端接觸點完全由手指關節(jié)角度決定,因此,給定靈巧手手指一個姿態(tài)后,采用二分法便可求出接觸點。
設手臂轉角130°,手指基關節(jié)旋轉為0°~60°,手指末關節(jié)旋轉0°~30°,用MATLAB進行求解,結果如圖9所示。
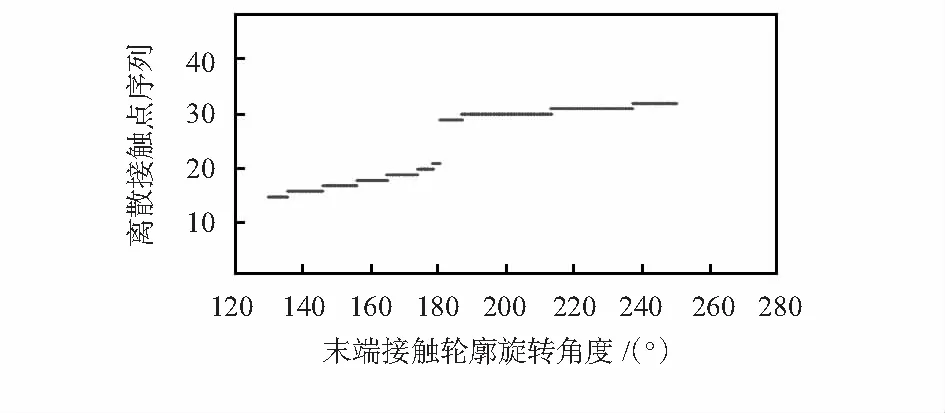
圖9 特定操作下的動接觸點與手指關節(jié)轉角關系
對照圖7可以發(fā)現(xiàn):1)隨著靈巧手操作末端姿態(tài)的旋轉,接觸點沿一個方向連續(xù)變化;2)特定的靈巧手接觸面曲線和被操作物體的曲線下,并未與每個點均將發(fā)生接觸,如圖9中的離散接觸點1~14與32~48在特定轉角條件下并未與被操作物體發(fā)生接觸,而由于接觸點21~29為一條直線,只有當該直線與物體平面平行這一特定角度下才會接觸,因此,離散求解中該段中間部分亦未發(fā)生接觸。
4 結束語
本文通過建立手指接觸面輪廓曲線和被操作對象的輪廓曲線,并根據手指與被操作對象的相對幾何位置關系確定出剛性接觸點的位置,由此得出靈巧手操作過程的變接觸點求解算法,該算法理論上可以找出變接觸點連續(xù)規(guī)律,而在計算機求解中也可以得到較觸覺精度高的接觸點。
[1] Bicchi A.Hands for dexterous manipulation and robust grasping:A difficult road toward simplicity[J].IEEE Trans on Robot,2010,16(6):652-662.
[2] 莫 沸,楊國勝,林英姿,等.基于自然接觸傳感器的智能控制手柄[J].傳感器與微系統(tǒng),2011,30(9):91-94.
[3] Masahiro Kondo,Jun Ueda,Tsukasa Ogasawara. Recognition of in-hand manipulation using contact state transition for multifingered robot hand control[J].Robotics and Autonomous Systems,2008,56(1):66-81.
[4] 呂根波,李成剛,申景金.內凹面觸覺傳感器設計與接觸過程分析[J].傳感器與微系統(tǒng),2015,34(8):21-25.
[5] Tegin J,Wikander J.Tactile sensing in intelligent robotic manipulation—A review[J].Industrial Robot:An International Journal,2005,32(1):64-70.
[6] Huang M B,Huang H P,Cheng C C,et al.Efficient grasp synthesis and control strategy for robot hand-arm system[C]∥2015 IEEE International Conference on Automation Science and Engineering(CASE),IEEE,2015:1256-1257.
[7] Liu H,Wu K,Meusel P,et al.Multisensory five-finger dexterous hand:The DLR/HIT hand II[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems,2008.
[8] 樊紹巍,劉伊威,金明河,等.HIT/DLR Hand II 類人形五指靈巧手機構的研究[J].哈爾濱工程大學學報,2009,30(2):172-177.
[9] Hanna Yousef,Mehdi Boukallel,Kaspar Althoefer.Tactile sensing for dexterous in-hand manipulation in robotics—A review[J].Sensors and Actuators A,2011,167:171-187.
[10] 張元飛.機器人靈巧手指尖柔性觸覺傳感器研制及操作研究[D]. 哈爾濱:哈爾濱工業(yè)大學,2012.
