基于八角環(huán)二維力傳感器抓取力控制研究*
2018-01-26 09:27:20宋俊男張秋菊
傳感器與微系統(tǒng) 2018年2期
關(guān)鍵詞:檢測
宋俊男, 張秋菊, 張 進(jìn)
(1.江南大學(xué) 機(jī)械工程學(xué)院,江蘇 無錫 214122;2.江蘇省食品先進(jìn)制造裝備技術(shù)重點(diǎn)實(shí)驗室,江蘇 無錫 214122)
0 引 言
機(jī)械手實(shí)現(xiàn)對物體的無滑動穩(wěn)定抓取,尤其是在抓取柔軟或者酥脆的物體時,抓取控制是一個難題。機(jī)械手抓取物體時,常采用觸覺傳感器檢測夾持力大小[1,2]。為了使夾持器具有更強(qiáng)的適應(yīng)性,夾取未知物體,相關(guān)研究在夾持器系統(tǒng)中引入了滑覺傳感器,以檢測物體與夾持器之間的相對滑動[3~7]。此外,力傳感器和滑覺傳感器的集成在果蔬抓取中得到了應(yīng)用[6,7]。
在國內(nèi)外現(xiàn)有技術(shù)中,單獨(dú)檢測滑覺的直接反饋控制未考慮抓取滑動的各種情況,未實(shí)時掌握物體的質(zhì)量,表面摩擦系數(shù),硬度等要素,只是一旦檢測到滑動即增加抓取力,不具備較強(qiáng)的自適應(yīng)性[8]。更多是在研究滑動發(fā)生后,如何檢測滑覺,怎樣加載夾持力以消除滑動。甚至還會出現(xiàn)滑動已經(jīng)發(fā)生了,執(zhí)行器還未反應(yīng),導(dǎo)致抓取失敗的問題。在有效預(yù)防滑動,實(shí)施穩(wěn)定抓取方面的研究很少。
為了使機(jī)械手具有自適應(yīng)能力,本文將八角環(huán)二維力傳感器運(yùn)用于機(jī)械手末端,感知抓取過程中夾持力和切向力信息,并對機(jī)器人末端二指平行手爪進(jìn)行力反饋控制。通過檢測切向力,對夾持力進(jìn)行力比例控制。
1 八角環(huán)原理及設(shè)計
1.1 八角環(huán)的理論分析與計算
如圖1所示,圓環(huán)受垂直力Fy和水平力Fx作用,各處的力矩Mθ為
(1)
式中r為圓環(huán)的平均半徑;θ為力作用點(diǎn)法線方向與y軸夾角,順時針為正。由式(1)可求得圓環(huán)的應(yīng)變節(jié)點(diǎn),當(dāng)Fx使Mθ等于0時,θ等于90°;當(dāng)Fy使Mθ等于0時,θ等于39.6°或140.4°。
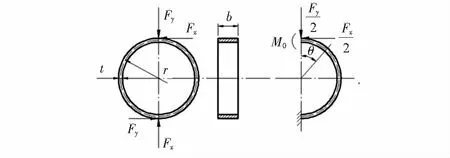
圖1 圓環(huán)受力分析
八角環(huán)傳感器如圖2所示,對傳感器施加垂直載荷Fy和水平載荷Fx,以及逆時針方向的正力矩M0。所施加力的作用點(diǎn)如圖2,其中,F(xiàn)y對環(huán)產(chǎn)生壓縮。在環(huán)上,角度φ位置處產(chǎn)生的力矩Mφ為[9]
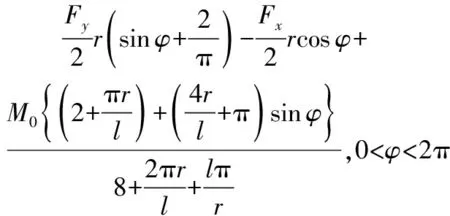
(2)
產(chǎn)生的應(yīng)變εφ為
(3)
式中b為環(huán)寬;l為兩圓孔孔距;r為環(huán)的平均半徑;t為環(huán)厚;φ為逆時針與y軸的夾角;E為材料的彈性模量。
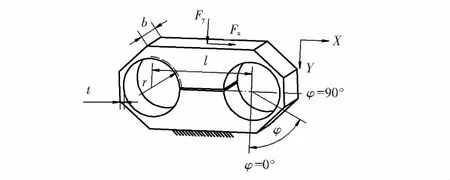
圖2 八角環(huán)傳感器
1.2 八角環(huán)傳感器結(jié)構(gòu)設(shè)計
傳統(tǒng)的八角環(huán)傳感器多用于測機(jī)床切削力[10],測力范圍在千牛(kN)量級,具有高剛度、低靈敏度,以及體積大等缺點(diǎn),不適合機(jī)械手末端信息采集。本文將傳感器微型化,尺寸參數(shù)優(yōu)化后,八角傳感器結(jié)構(gòu)如圖3所示。
圖3 傳感器結(jié)構(gòu)及應(yīng)變片分布
在傳感器的中線面處設(shè)有凸型間隙,對傳感器有過載保護(hù)作用;寬h的梁間隙(h=1 mm),可以減小工作環(huán)寬,增加傳感器的靈敏度。X向檢測切向力,Y向檢測夾持正壓力。所施加力的量程為Fy=20 N,F(xiàn)x=10 N。該傳感器的材料為LY12硬鋁合金。根據(jù)傳感器小型化,具有高靈敏度,且要產(chǎn)生足夠的應(yīng)變,但不能超過1 500×10-6mm/mm,并且設(shè)計安全系數(shù)在2~2.5。根據(jù)式(2)和式(3),設(shè)計八角環(huán)的尺寸,確定八角環(huán)結(jié)構(gòu)參數(shù)為:環(huán)寬度b=6 mm,孔距l(xiāng)=15 mm,平均半徑r=4.3 mm,環(huán)厚度t=0.5 mm。
1.3 八角應(yīng)變片布片及測試原理
為了方便貼片布線,應(yīng)變片電阻器分布如圖3所示。采用2個全橋惠斯通電橋分別測量2個方向力。其中,R1~R4用于測量Fx;R5~R8用于測量Fy。
電路測試原理如式(4)
(4)
式中K1,K2分別為UFx,UFy的輸出系數(shù)。
2 八角環(huán)貼片位置分析
2.1 八角環(huán)傳感器受力分析
利用Ansys Workbench對所設(shè)計的傳感器進(jìn)行有限元分析,能準(zhǔn)確找到應(yīng)變節(jié)點(diǎn),確定應(yīng)變片的最佳貼片位置。
彈性體的加工材料為硬質(zhì)鋁合金LY12,應(yīng)變計選擇中航電測BF120—1AA—W(23),敏感柵尺寸為1 mm×1 mm。在傳感器底部施加約束,分別在頂部斷面中心施加滿量程集中力載荷Fx=10 N,F(xiàn)y=20 N,傳感器受力坐標(biāo)軸如圖2。圖4為八角環(huán)有限元分析結(jié)果,F(xiàn)y=20 N,傳感器最大應(yīng)力在φ=90°左右處,如圖4(a);Fx=10 N,傳感器最大應(yīng)力在φ=45°左右處,如圖4(b)。在滿載情況下,八角環(huán)所受最大應(yīng)力為139 MPa,小于硬鋁合金的屈服強(qiáng)度360 MPa,安全系數(shù)為2.6,說明安全。
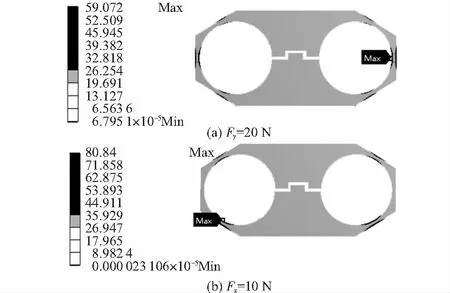
圖4 傳感器有限元分析結(jié)果
2.2 應(yīng)變節(jié)點(diǎn)分析
選擇傳感器梁的中心位置為定義路徑,如圖3所示,由于傳感器是對稱的,路徑ab,cd,ef,gh即可反映所有應(yīng)變情況,其中,路徑gh定義為環(huán)內(nèi)壁φ=(0°~180°)。
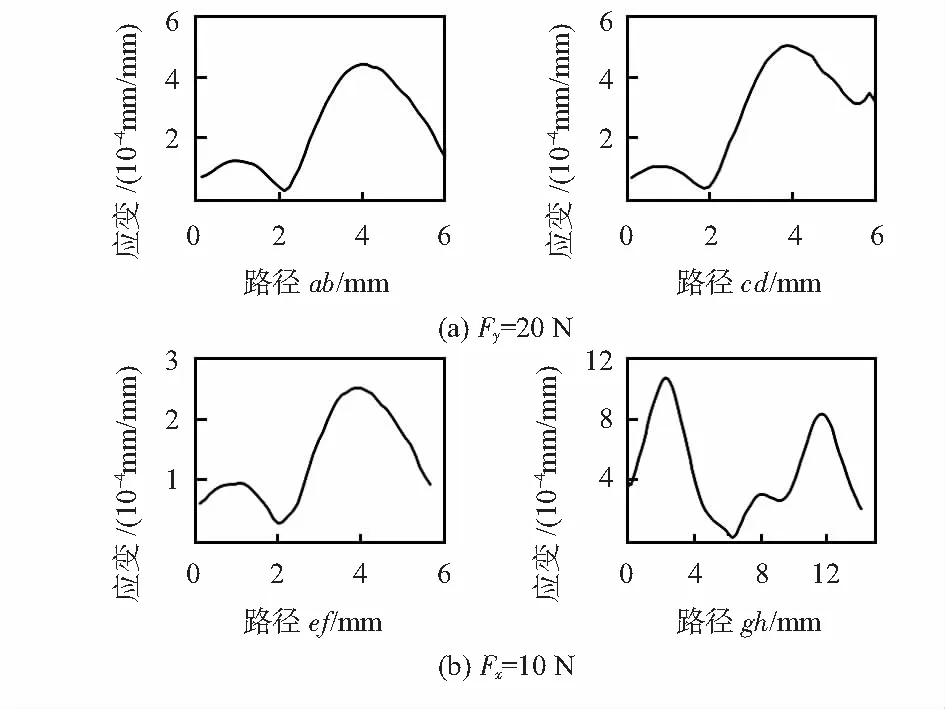
圖5 沿路徑應(yīng)變分布
路徑上各節(jié)點(diǎn)應(yīng)變?nèi)鐖D5所示。在單維力Fy=20 N作用下,路徑ab在2.0 mm附近應(yīng)變?yōu)? mm/mm,路徑cd在1.9 mm附近應(yīng)變?yōu)? mm/mm。在單維力Fx=10 N的作用下,路徑ef在2.0 mm附近應(yīng)變?yōu)? mm/mm,路徑gh在6.2 mm附近應(yīng)變?yōu)? mm/mm。
以上方式僅粗略定位應(yīng)變片的位置。由于應(yīng)變片測得的是應(yīng)變片面積內(nèi)的平均應(yīng)變,因此,需找到最小的應(yīng)變值以得到準(zhǔn)確貼片位置。在有限元分析過程中,根據(jù)圖5結(jié)果安排貼片位置,并對貼片進(jìn)行微調(diào),找到應(yīng)變片應(yīng)變區(qū)域平均應(yīng)變值最小的位置,獲得八角環(huán)傳感器的最佳貼片位置。最終貼片位置為路徑ab的1.66 mm處,φ=143.37°處;路徑cd的1.60 mm處,φ=46.33°處;路徑ef在1.88 mm,φ=83.82°處;路徑gh在φ=82.34°處。
3 傳感器的靜態(tài)標(biāo)定與解耦分析
根據(jù)傳感器設(shè)計尺寸,選擇材料LY12—CZ,粗加工后,人工時效24 h再精加工,完成傳感器的制作。傳感器實(shí)物如圖6所示,按照圖3所示,在傳感器上粘貼應(yīng)變片,8個電阻應(yīng)變片組成2個全橋電路,分別測量X向力及Y向力。采用恒壓源供電,鋁合金溫度自補(bǔ)償應(yīng)變計,全橋電路做溫度補(bǔ)償,全橋并聯(lián)調(diào)零電路。標(biāo)定應(yīng)在盡可能接近工作環(huán)境的條件下進(jìn)行,將傳感器信號輸出端連接500倍放大電路,接在采集卡上。

圖6 八角環(huán)傳感器實(shí)物
為了消除或減小維間耦合誤差,提高測試精度,需要對傳感器進(jìn)行標(biāo)定實(shí)驗[11]。
標(biāo)定矩陣表達(dá)了二維力傳感器輸入與輸出的線性關(guān)系。由于存在維間耦合,橋路輸出電壓與力的關(guān)系為
(5)
依次在X,Y方向上施加一組已知的定值載荷,反復(fù)3次,并同時記錄X,Y方向橋路的輸出電壓值,再對每次數(shù)據(jù)做算術(shù)平均,通過最小二乘擬合成4條曲線。X方向施加力時,F(xiàn)x=0.426 7x-0.005 6;Fy=-0.002 8x-0.007 7;Y方向施加力時,F(xiàn)y=0.222 9x-0.018 7;Fx=-0.004 9x-0.004 5。曲線的斜率k1,k2,k3,k4,b1,b2,b3,b4,即對應(yīng)標(biāo)定系數(shù)矩陣中的對應(yīng)的系數(shù),得到傳感器標(biāo)定系數(shù)矩陣C和b為
將C和b代入式(5)可以得到二維力的解
(6)
4 基于八角環(huán)二維力傳感器的抓取力調(diào)節(jié)
為了既能避免抓取物滑落,又能防止物體損傷,必須獲得最小抓取力。摩擦系數(shù)可以通過切向力和法向力的比值得到,本文通過運(yùn)用八角環(huán)二維力傳感器檢測摩擦系數(shù),測得的系數(shù)結(jié)果與斜坡法作對比。
傳感器與夾持器安裝如圖7所示。穩(wěn)定抓取條件
2μ0Fn≥Mg
(7)
化簡得
Fn≥Mg/2μ0
(8)
式中μ0為最大靜摩擦系數(shù);Fn為夾持力;Mg為物體重量;Ft為物體所受摩擦力。Mg和μ0可以由八角環(huán)二維力傳感器檢測,根據(jù)物體受力平衡有Fx=Ft,F(xiàn)y=Fn,Mg=2Fx,式(8)可簡化為
μ0≤Fx/Fy
(9)
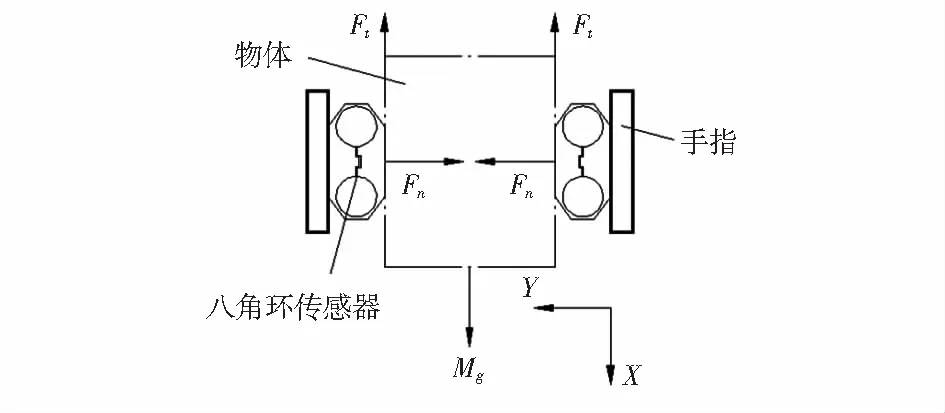
圖7 平行二指接觸受力分析
4.1 最小夾持力獲得及靜摩擦因素測定
夾持器系統(tǒng)如圖8所示,二指平行手爪安裝于機(jī)器人末端,八角環(huán)二維力傳感器安裝于手爪末端。末端執(zhí)行器采用三菱伺服電機(jī)、同步帶輪、雙旋向絲杠組成的二指夾持器。
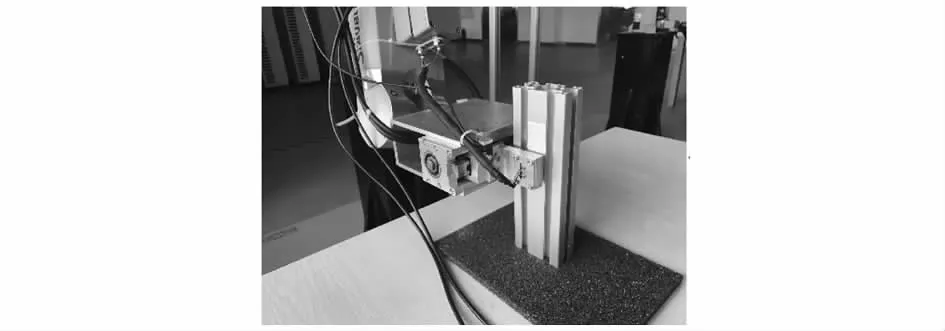
圖8夾持器系統(tǒng)實(shí)物
先以一個較大的力抓住物體,然后逐漸松開手爪,當(dāng)Fx有變化的趨勢時,證明物體有滑動趨勢。此時記錄Fx和Fy,F(xiàn)y為該物體的最小夾持力,可得最大靜摩擦系數(shù)μ0=Fx/Fy。
在傳感器表面及對應(yīng)手指表面貼有一層橡膠,圖9(a)~圖9(c)顯示手爪抓取不同表面材料檢測的切向力和夾持力。在2 s左右表示物體即將脫離手指。兩實(shí)驗對比如表1。
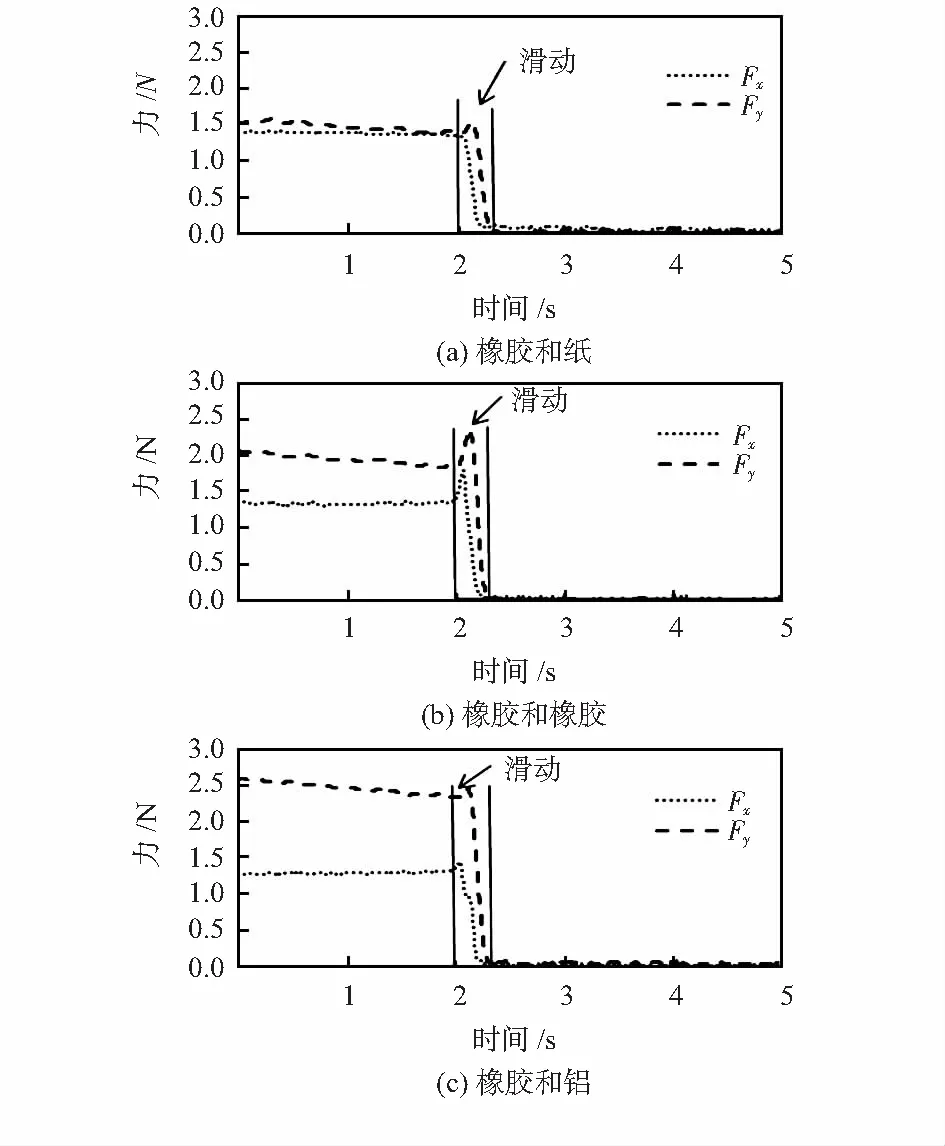
圖9 摩擦系數(shù)的測量結(jié)果
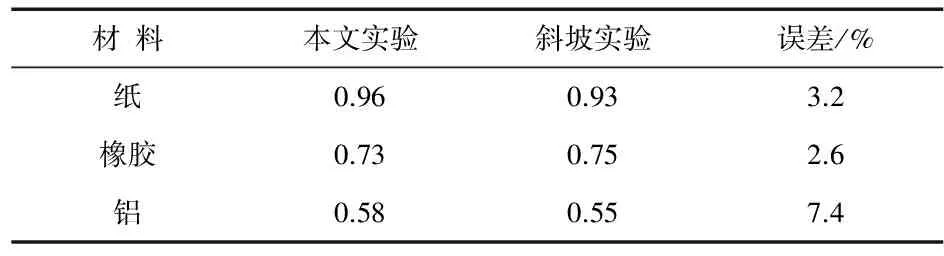
表1 靜摩擦系數(shù)實(shí)驗對比
4.2 夾持力和切向力的力比例控制
根據(jù)前述方法測量最大靜摩擦系數(shù)μ0,并將μs設(shè)定為目標(biāo)值,令μs<μ0,根據(jù)式(10)調(diào)節(jié)夾持力Fy,使Fx/Fy永遠(yuǎn)趨于μs,且小于μ0,處于摩擦錐內(nèi)
Fy=Fx/μs
(10)
如圖10(a)所示,機(jī)械手抓取玻璃杯,玻璃杯重約40 g,測得玻璃杯與夾爪最大摩擦因素μ0=0.12,最小夾持力為2 N。控制二指夾持器以2 N的夾持力抓住玻璃杯,機(jī)械手在T1時刻以2.5 mm/s勻速抬升。設(shè)定μs=0.1,T2時刻打開力比例調(diào)節(jié)控制器,然后逐漸向杯里加20 g砝碼,使玻璃杯質(zhì)量增加。當(dāng)八角環(huán)傳感器檢測到切向力Fx增加,夾持器系統(tǒng)根據(jù)式(10)調(diào)節(jié)夾持力Fy,使μs=0.1,如圖10(b)所示。夾持力Fy永遠(yuǎn)以一個接近最小夾持力去夾持物體,有效消除了外界干擾的影響,避免了物體滑落,實(shí)現(xiàn)了穩(wěn)定抓取。

圖10 抓取玻璃杯
5 結(jié) 論
設(shè)計了一種小型八角環(huán)二維力傳感器,可用于機(jī)械手二維抓取力的檢測。該傳感器采用電阻應(yīng)變片和橋式檢測電路,結(jié)構(gòu)簡單,體積小,成本低。標(biāo)定結(jié)果表明:傳感器量程為X向0~10 N,靈敏度為0.45 V/N;Y向0~20 N,靈敏度為0.2 V/N;總精度0.5 %。基于八角環(huán)二維力傳感器的抓取力調(diào)節(jié)試驗表明:能有效預(yù)防滑動的發(fā)生,實(shí)現(xiàn)了無滑動的穩(wěn)定抓取。
[1] Chitta S,Sturm J,Piccoli M,et al.Tactile sensing for mobile manipulation[J].IEEE Transactions on Robotics,2011,27(3):558-568.
[2] 胡志勇,張學(xué)煒,張 偉,等.西瓜采摘末端執(zhí)行器夾持力精確控制[J].農(nóng)業(yè)工程學(xué)報,2014,30(17):43-49.
[3] 周 俊,楊肖蓉,朱樹平.基于自適應(yīng)神經(jīng)模糊網(wǎng)絡(luò)的果蔬抓取力控制[J].農(nóng)業(yè)機(jī)械學(xué)報,2014,45(7):67-72.
[4] Zhang Y,Duan X,Zhong G,et al.Initial slip detection and its application in biomimetic robotic hands[J].IEEE Sensors Journal,2016,16(19):7073-7080.
[5] Pettersson A,Davis S,Gray J O,et al.Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes[J].Journal of Food Engineering,2010,98(3):332-338.
[6] 周 俊,朱樹平.農(nóng)業(yè)機(jī)器人果蔬抓取中滑覺檢測研究[J].農(nóng)業(yè)機(jī)械學(xué)報,2013,44(2):171-176.
[7] 朱樹平.基于滑覺檢測的農(nóng)業(yè)機(jī)器人果蔬抓取研究[D].南京:南京農(nóng)業(yè)大學(xué),2012.
[8] 李雪峰.基于滑動檢測的假肢手反射控制研究[D].長沙:中南大學(xué),2014.
[9] McLaughlin N B.Correction of an error in equations for extended ring transducers[J].Transactions of the ASAE,1996,39(2):443-444.
[10] Zhao Y,Zhao Y,Liang S,et al.A high performance sensor for triaxial cutting force measurement in turning[J].Sensors,2015,15(4):7969-7984.
[11] 何 斌,蔡 蜜,王 昆.仿生濕吸二維微力傳感器設(shè)計與試驗研究[J].傳感器與微系統(tǒng),2014,33(3):79-81.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
