一種新的四自由度SCARA機器人手眼標定方法*
2018-01-26 09:27:21石國良
傳感器與微系統 2018年2期
陳 丹,白 軍,石國良
(福州大學 電氣工程與自動化學院,福建 福州 350108)
0 引 言
工業機器人以其精度高、穩定可靠、效率高等特點在工業上應用廣泛,然而智能化、柔性化是制約其發展的瓶頸,機器人視覺系統的應用能夠解決這些問題。機器人視覺系統分為Eye-in-hand和Eye-to-hand。Eye-in-hand視覺系統指相機固定在機器人關節上,隨機器人一起運動的視覺系統。當機器人執行任務時,機器人關節上的相機采集工作視場信息,然后由計算機提取、轉換為末端執行器和工作對象的相對距離,通過反饋距離信息,完成執行任務。若要視覺系統工作正常,需要知道相機坐標系與機器人坐標系之間的相對關系,即手眼關系。手眼關系標定是一項關鍵技術,標定精度直接影響到系統執行任務是否成功。許多學者在這方面做過很多研究,并取得成果,如Ma S D[1]提出了主動視覺的方法,利用消影點和平移向量之間的關系,只需3次平移就可以計算旋轉矩陣,2次旋轉和1次平移就可以計算平移矩陣; Ulrich M[2]引入螺旋理論代表空間任意運動,采用雙四元數表示螺旋簡化數學運算,通過標定板上特征點之間的約束和機器人運動規律同時求解旋轉矩陣及平移矩陣;楊廣林等人[3]通過對攝像機坐標系進行虛設旋轉變換使旋轉變換轉化為平移問題,只需要2次平移運動和1次旋轉運動就可以計算手眼關系;黃朝興等人[4]利用主動視覺的方法標定旋轉矩陣,結合激光筆確定特征點的世界坐標,標定平移矩陣。
然而,像SCARA有3個平行的旋轉軸的機器人,許多要求做幾組旋轉軸不平行的旋轉運動的方法并不適用,如Henrik Malm[5]和Shiu Y C[6]的方法要求做至少2組不同軸的旋轉運動。本文以固高GRB—400四自由度SCARA機器人為研究對象,搭建機器人視覺系統,采用亞像素角點檢測確定精確的特征點像素坐標,利用主動視覺的方法標定旋轉矩陣,通過一個精加工的標準件—標定塊,易準確地確定特征點的世界坐標,完成平移矩陣的標定。
1 固高GRB—400機器人
固高GRB—400機器人是典型的SCARA機器人,有3個旋轉關節,其軸線(z軸)相互平行,另1個關節是移動關節,可以在平面內進行定位和定向,用于裝配、抓取工作。機器人手眼系統結構如圖1所示,采用D—H法建立機器人坐標系,得到末端執行器的位姿關系。
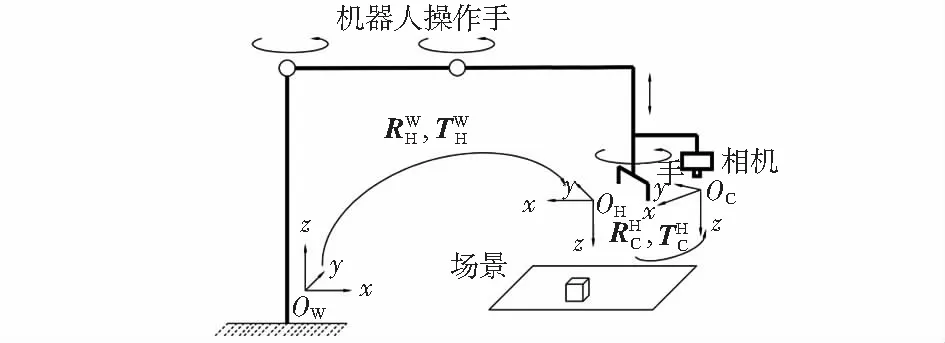
圖1 手眼視覺系統結構示意圖
2 手眼關系標定
2.1 手眼視覺系統中的坐標變換
如圖1所示,X為空間中的任意一點,R為旋轉矩陣,T為平移矩陣,通常用角標來區分不同的坐標系,角標W表示世界坐標系,H表示機器人末端執行器坐標系,C表示相機坐標系。坐標系之間的關系可以用式(1)、式(2)表示。式(2)是根據小孔成像模型得到
(1)
XC=zCM-1[uv1]T
(2)

(3)
式中αx,αy分別為u軸和v軸上的尺度因子;(u0,v0)為圖像中心;矩陣M通過MATLAB工具箱對相機進行標定得到;(u,v)為特征點X在圖像上的像素坐標;zC為相機坐標系中特征點XC在光軸z上的投影,即深度信息;zC可由參考文獻[3]給出的方法計算。
2.2 旋轉矩陣標定
工作平臺上貼有一打印的方格紙,取方格紙上的任意一交點X1,設其在執行器坐標系下的坐標為X1H,在相機坐標系下的坐標X1C,于是有
(4)

(5)
將式(4)代入式(5),化簡得
(6)
同理,做二次不同方向的運動,可得
(7)
(8)
寫成矩陣形式有
(9)
(10)
2.3 平移矩陣標定
取末端執行器在工作平臺可達范圍內的任意一點X2,其世界坐標記為X2W,代入式(1),得
(11)
將式(2)代入,得
(12)

2.3.1 特征點世界坐標確定
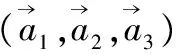
特征點X2的世界坐標通過一個精加工的標定塊來確定,標定塊的示意圖和機器人末端執行器示意圖如圖2所示,確定特征點X2的世界坐標原理如下:標定塊兩邊槽的尺寸等于末端執行器的尺寸,并放置在貼有白紙的工作平臺上,控制執行器將標定塊夾住,然后控制執行器分別進行4次90°的旋轉運動,每一次運動后將標定塊的同一邊緣用鉛筆描在紙上,最后得到一個矩形,將矩形的對角線相連,交點即為特征點 ,即末端第三連桿軸中心在工作平臺上的投影點,采取多次畫矩陣,取多個中心點的中間點,以減少誤差。第三連桿軸中心的坐標(x,y)可以從控制器中讀出,已知平臺高度,故可知特征點的世界坐標。
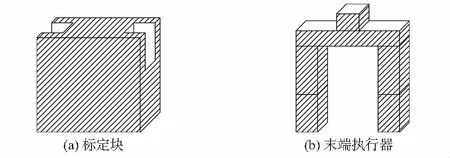
圖2 標定塊與末端執行器示意
2.3.2 特征點的圖像像素坐標

圖3 亞像素角點檢測原理
3 實驗結果與分析
實驗采用的硬件主要有固高GRB—400機器人,USB2.0 CMOS 300萬像素彩色數字相機,采集的圖像大小為2 048×1 536,機器人控制柜,普通臺式計算機,標定塊。相機固定在機器人末端的執行器上,搭建的實驗平臺如圖4所示。
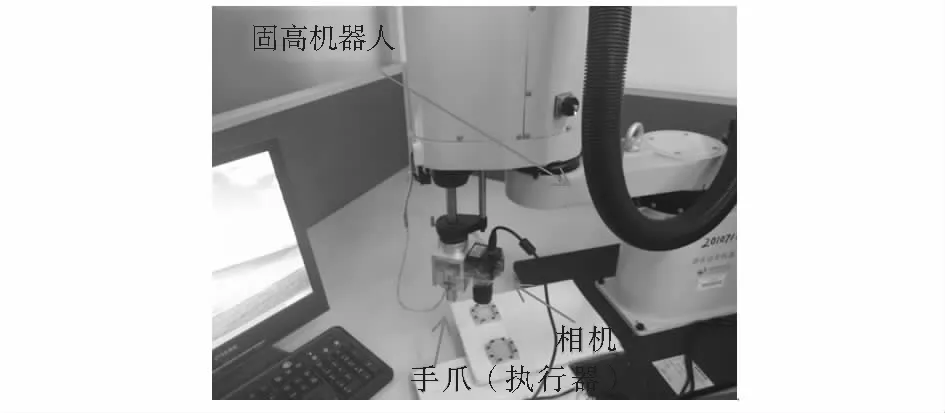
圖4 機器人手眼視覺系統
3.1 旋轉矩陣標定實驗
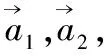
圖5 檢測到的亞像素角點
圖6 控制臺輸出的實數坐標點
實驗控制機器人完成4組運動,兩兩一組,如表1所示。實驗結果如表2所示,誤差由旋轉矩陣與平均值作差所得,可以看到標定的旋轉矩陣比較穩定,最大誤差均小于0.004。旋轉矩陣取平均值為
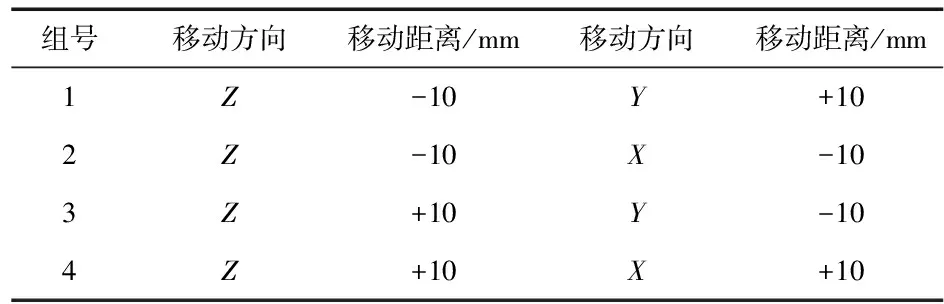
表1 4組平移運動次序
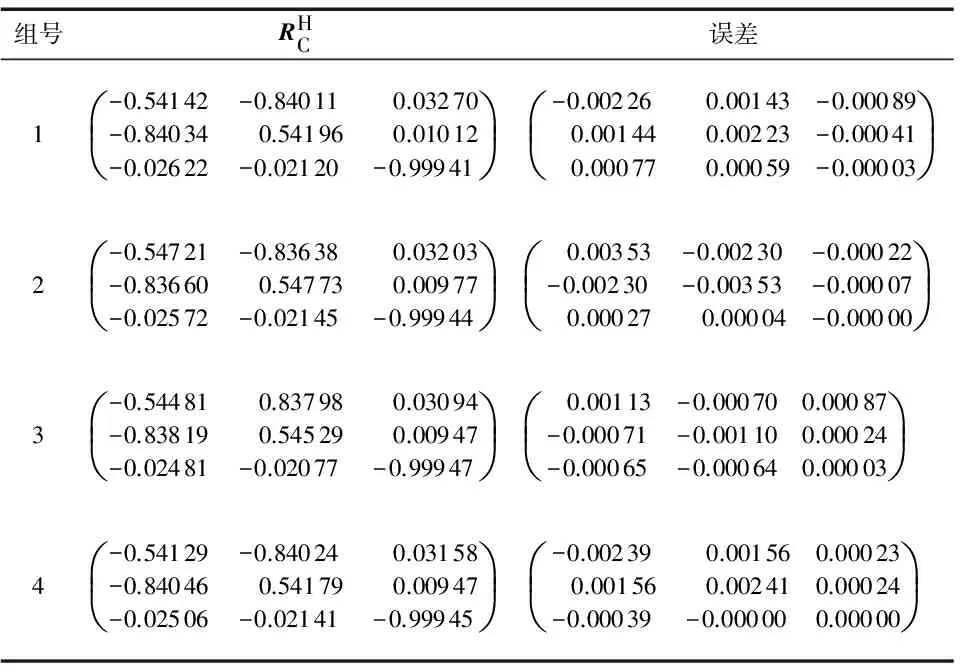
表2 旋轉矩陣標定結果
3.2 平移矩陣標定實驗
由于相機的光軸垂直于工作平臺,工作平面上的特征點在相機坐標系下的深度值相等,所以沿用旋轉矩陣標定實驗中已計算出的深值,最后通過式(12)計算平移矩陣。同理,另外任取4個點作為特征點,利用上述方法多次求解,減少偶然誤差,實驗結果如表3所示,看到:實驗結果比較穩定,最大誤差均小于0.21。平移矩陣平均值為
3.3 標定結果測試
繪制測試用的方格紙,如圖8所示,將紙貼在一個硬板上,呈任意角放在工作平臺上,取4個特征點作為測試點,計算兩點之間的距離,并與實際距離比較。最終的實驗結果見表4。由表4可知:誤差小于0.5 mm,精度較高,能滿足工業應用需要。
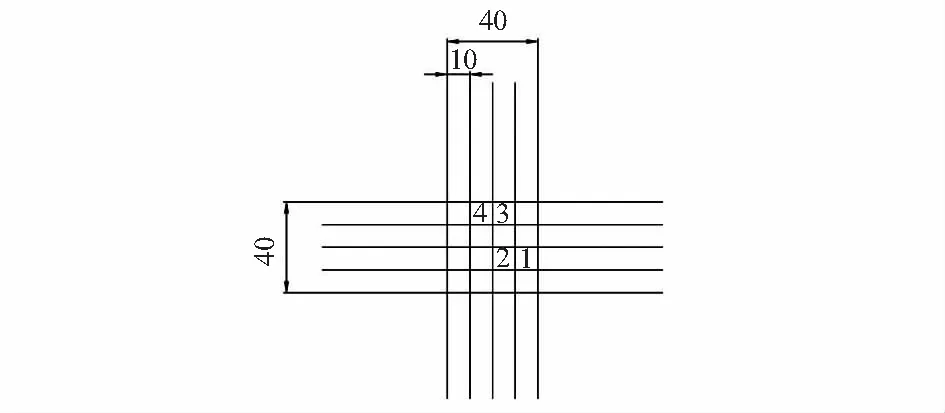
圖8 繪制的方格紙
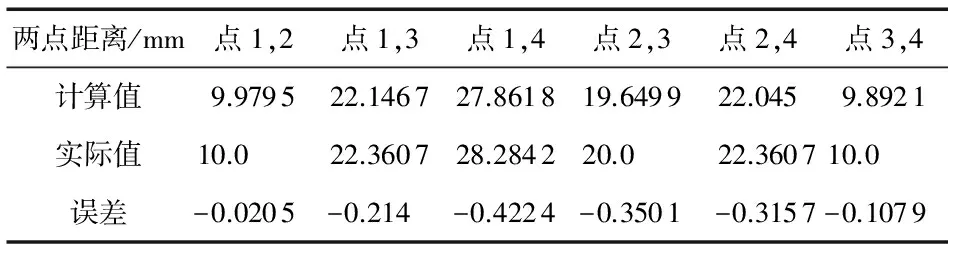
表4 不同特征點之間的計算距離與實際距離
3.4 對比實驗
對文獻[4]提出的方法進行了實驗,該方法利用主動視覺的方法標定旋轉矩陣,用激光筆輔助找世界坐標點,然后標定平移矩陣,實驗場景如圖9所示,選取工件平臺上的4個點,用該方法標定的數據計算特征點之間的距離,實驗結果如表5所示,可以看出誤差小于0.7 mm。對比表4、表5知,本文方法精度高于文獻[4],文獻[4]需先標定激光筆在末端執行器坐標系下的坐標,并要求激光筆垂直工作平面,增加了誤差,降低了標定的精度。本文借助于標定塊,利用幾何知識,直接確定特征點世界坐標,簡捷、易實現。

圖9 對比實驗場景
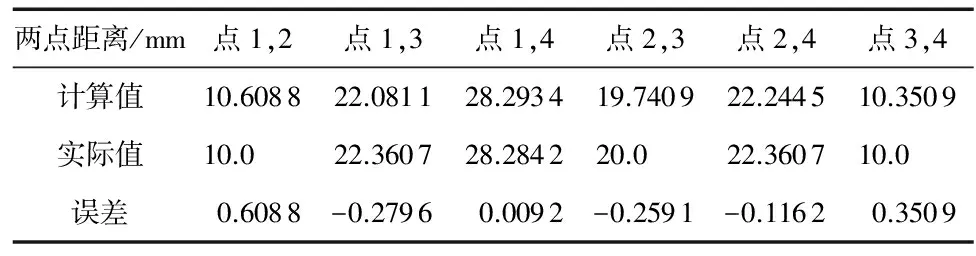
表5 文獻[4]實驗結果
表6列出了幾種文獻標定的精度,文獻[1]的方法要求有二個不同的旋轉軸,文獻[2]標定精度較高,但是需借助于雙四元數理論以及非線性優化,實現算法和具體步驟比較復雜,文獻[4]標定精度高于文獻[1]的精度,本文方法實現簡單,精度較高。

表6 幾種文獻標定精度
4 結 論
利用精加工的標準件—標定塊,通過幾何作圖的方法,精確快捷地確定末端執行器中心在工作平臺上的投影點所對應的世界坐標,簡化了求解世界坐標的過程,提高了平移矩陣的標定精度,采用亞像素角點提取算法,提取特征點的世界坐標,結合機械手平移規則,進一步提高了旋轉矩陣的標定精度。實驗結果表明:本文方法標定精度較高,可滿足工業機器人的精確定位、普通抓取等作業。
[1] Ma S D.A self-calibration technique for active vision systems[J].IEEE Transactionsons on Robotics and Automation,1996,12(1):114-120.
[2] Ulrich M,Steger C.Hand-eye calibration of SCARA robots using dual quaternions[J].Pattern Recognition and Image Analysis,2016,26(1):231-239.
[3] 楊廣林,孔令富,王 潔.一種新的機器人手眼關系標定方法[J].機器人,2006,28(4):400-405.
[4] 黃朝興,陳 丹,唐旭晟.帶激光筆的機器人主動視覺的手眼標定[J].微型機與應用,2015,34(17):70-74.
[5] Henrik Malm,Anders Heyden.A new approach to hand-eye calibration[C]∥Proceedings of the 15th International Conference on Pattern Recognition,2000:525-529.
[6] Shiu Y C,Ahmad S.Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the Form AX=XB[J].IEEE Transactions on Robotics & Automation,1989,5(1):16-29.
[7] 陳 丹,石國良.基于視覺幾何的傳送帶測速方法研究[J].儀器儀表學報,2016,37(10):2307-2315.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
