基于柔性觸覺傳感器的坐姿壓力監測系統設計*
2018-01-26 09:27:22江子燁
傳感器與微系統 2018年2期
江子燁,裴 榮,吳 鍵
(南京理工大學 機械工程學院,江蘇 南京 210094)
0 引 言
不良坐姿狀態下人體局部受力不平衡,易導致一些疾病的發生,對人體坐姿壓力監測系統的研究顯得尤為重要。目前,國內外對人體壓力分布的測量比較少,主要集中在可穿戴式健康設備與足底壓力的研究上[1]。美國Tekscan公司研制的壓力分布測量系統由2片聚酯薄膜組成[2],該傳感器厚度僅為0.1 mm,且柔性很好,成本低廉,但其遲滯影響嚴重,功耗高。Roho公司的Xsensor壓力測量系統[3]為墊面狀電容式壓力傳感器,該傳感器柔軟耐用,但厚度較厚,因此,表面壓力值的測量準確性會受到影響。日本富士公司研制的壓敏片能通過顏色反映接觸區域的壓力分布情況[4],該傳感器較薄,使用簡單,價格低廉,但每片只能使用一次。2014年,新加坡團隊Darma設計了一種“不可穿戴”設備,智能坐墊,采用光纖傳感器,可以測量使用者的坐姿、使用時間以及心率、呼吸等數據,但價格昂貴,不易于推廣應用。
本文基于導電橡膠的壓阻特性,選取了64個導電橡膠構成傳感器陣列進行人體壓力信號的采集,并設計了兩級多路模擬開關對信號電路進行簡化,通過無線發送模塊傳輸數據,最終在上位機通過配色方案及插值形成人體壓力的彩色圖像,并應用分布式壓縮感知理論降低系統功耗。采用的傳感器成本低廉、柔軟耐用,經實驗驗證其靈敏度高,多路模擬開關有效地降低了系統功耗。
1 系統硬件設計
采用模塊化設計方法,主要包括柔性觸覺傳感器陣列的設計、信號采集與調理電路以及無線發送模塊3部分。其中,單片機采樣電路主要完成陣列信號的采集與調理,將數據 A/D 轉換后通過無線發送模塊傳輸至上位機。
1.1 傳感器陣列設計
坐墊應舒適且符合人體工學,因此,傳感器需要柔軟耐用。通過比較常用的壓力傳感器的性能與成本,最終選取了以炭黑為填充材料的導電橡膠[5],性價比高,易于集成,柔韌性與彈性良好,且壓阻特性明顯,即導電橡膠會根據所受壓力大小而發生形變,其電阻值也隨之發生改變。
傳感器陣列由64個敏感單元組成,每個敏感單元直徑為10 mm,傳感點根據人體工學的特點分布,即傳感點在受力梯度大的區域密度大,受力梯度小的區域密度小,如圖1所示。傳感器陣列共分為3層:下面板為薄塑料板,板上敷有銀漿電路形成傳感器陣列的電路排列,并在敏感單元導電橡膠對應位置留有間隙;上面板為粘貼有導電橡膠的薄塑料板,其位置與下面板對應;中間層為網格狀,其網孔和導電橡膠的位置一一對應,起到固定導電橡膠的作用。當受到外力時,上板層的導電橡膠接觸到下板層電路導通[6]。
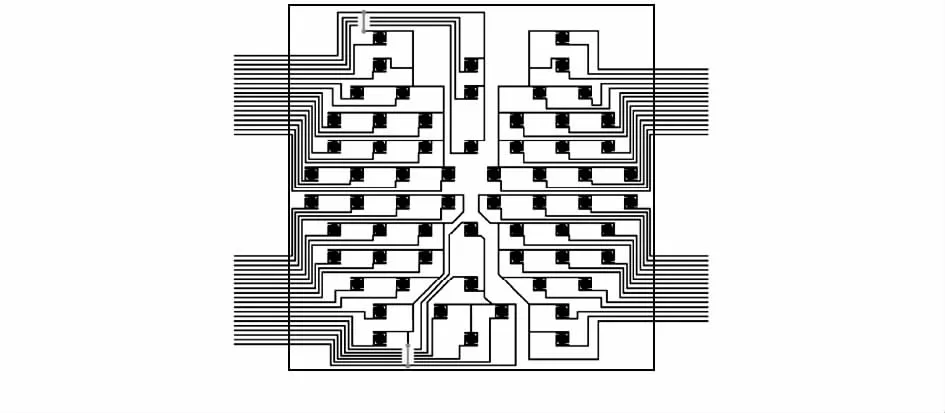
圖1 傳感器陣列的平面與分層結構
1.2 信號采集電路
信號采集電路如圖2所示,圖中R為阻值10 kΩ的分壓電阻器,導電橡膠為可變電阻器R0~R63。輸出端的電壓變化分別反映了64個導電橡膠的阻值變化,由此即可通過64個導電橡膠的壓力信息,得到人體壓力的分布狀態。
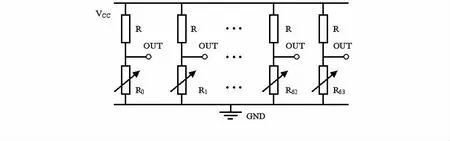
圖2 傳感器陣列的信號采集電路原理
選擇了8通道的模擬開關CD4051[7]實現多路傳感信號的高速切換,將CD4051分為2級對來自傳感器的信號進行切換,第1級使用8個CD4051并行工作,同時處理64路信號,其片選端始終處于選通狀態,第2級使用一個CD4051,最終只輸出1路信號進入后續電路。
1.3 單片機控制電路設計
選擇低功耗單片機MSP430G2553。圖3為單片機對CD4051的控制電路。選擇了單片機的6個I/O口,分別控制第一級8個CD4051的地址選擇端以及第二級CD4051的地址選擇端,即可通過單片機的編程實現對多路信號的選通。
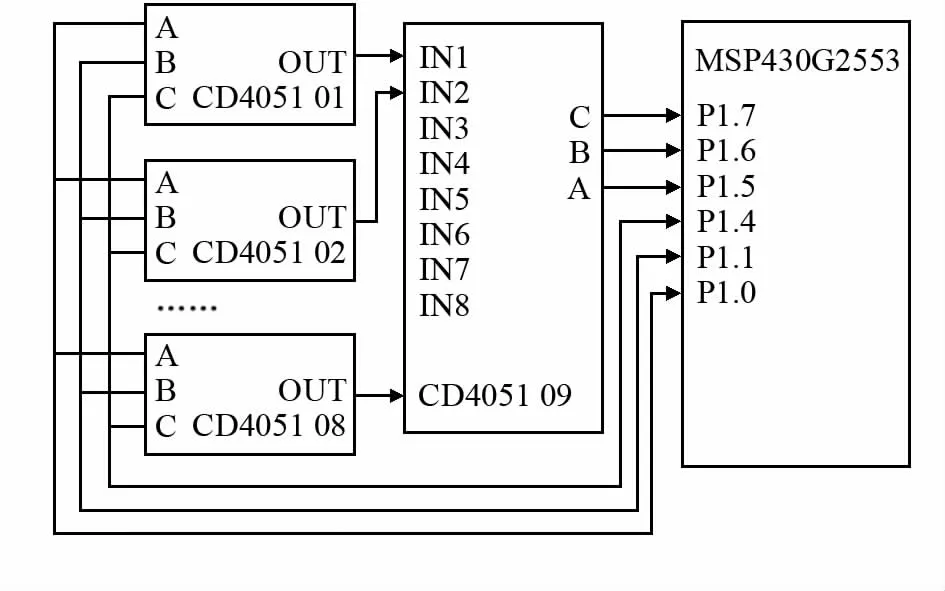
圖3 單片機對多路模擬開關的控制電路
MSP430G2553自帶有10位的ADC,單片機接收到數據之后通過復用AD功能對傳輸的數據進行A/D轉換,選擇單通道重復采樣方式,并進行數據存儲。為了增強通信的可靠性,減少通信的誤碼率,在通信過程中約定了上位機與下位機間握手方法:上位機給單片機發送握手信號0xFF,單片機接收到的數據若為0xFF,則發送數據包,并將0xFF作為第一個數據嵌入到數據包中;若不是0xFF,則循環等待。若上位機接收到的數據包中第一個數據不是0xFF,則拋棄該數據包;若是,則表示握手成功。
1.4 無線模塊選取
選擇了藍牙模塊HC—05作為無線發送模塊進行數據傳輸,HC—05接口電平3.3 V,可以直接與單片機連接,空曠地有效通信距離20 m,使用簡單,體積小,且有一定的防靜電能力。HC—05是主從一體的藍牙串口模塊,將藍牙配置于自動連接工作模式,當與其他設備配對成功后,可以忽視藍牙內部的通信協議,直接將藍牙做串口使用。選用藍牙模塊使得數據的傳輸更加方便,不受串口線距離的限制。
最終搭建的硬件系統框圖如圖4所示。上位機通過藍牙模塊與采集電路建立通信,并將信號傳輸至計算機,在MATLAB環境中讀取、處理數據,最終形成清晰直觀的人體坐姿壓力分布彩色圖像。
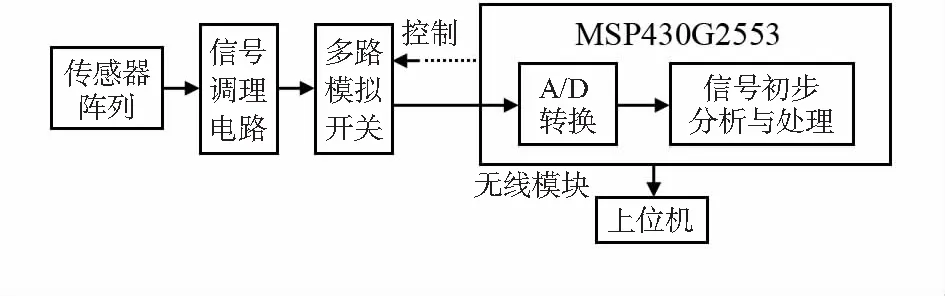
圖4 系統硬件部分結構框圖
2 系統的可視化實現
上位機采用MATLAB編寫,利用MATLAB提供的設備控制工具箱(instrument control toolbox)與圖形用戶界面(graphical user interface,GUI)工具箱對串口通信與用戶界面進行設計,實現對壓力分布情況的圖像顯示、數據存儲。軟件設計流程如圖5所示。
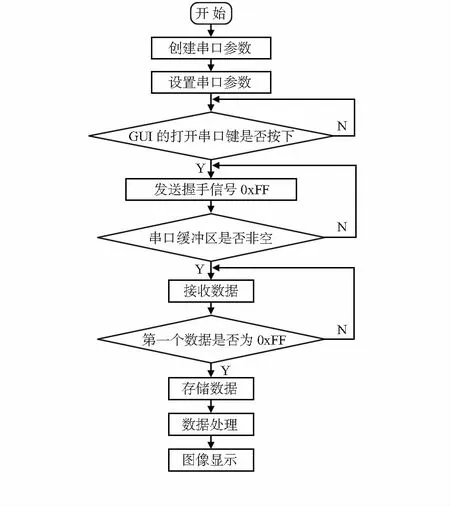
圖5 軟件設計流程
使用窗函數法設計優先沖激響應(finte impulse response,FIR)低通數字濾波器進行濾波,并使用dlmwrite函數將濾波處理后的原始電壓數據存儲在一個.txt文件中。數據經過處理之后,采用偽彩色的配色方案,即顏色的深淺代表該位置處所受壓力數值的大小。另外對64 個傳感節點采集到的壓力數據進行雙線性插值計算,從而使得顯示的壓力分布更加清晰直觀。
系統中的傳感器陣列屬于分布式信源,采集的信號不僅具有信號內的相關性,還具有信號間的相關性,因此,符合分布式壓縮感知的第二聯合稀疏模型(joint sparse model—2,JSM—2)[8]。使用高斯隨機矩陣作為觀測矩陣對信號進行壓縮,并針對JSM—2模型的特點,選擇了同步正交匹配追蹤(simultaneous orthogonal matching pursuit,SOMP)算法[9],該算法適合處理分布式多信源信號,可以同時重建多個信號。在MATLAB中對64路信號進行稀疏化,并重構得到壓力圖像,從而有效降低系統功耗。
3 實驗與結果分析
系統通過3.3 V直流穩壓電源進行供電,實驗時隨機挑選一人,監測其正常坐姿時的人體壓力信號,通過藍牙傳輸得到的壓力值如表1所示,序號1對應的壓力值為傳感器陣列中第一行第一個傳感節點采集到的數據,序號2對應傳感器陣列中第一行第二個傳感節點采集到的數據,依次類推。最終形成的壓力分布圖像如圖6(a)所示。表2為該實驗人員坐姿右傾時的部分壓力信號值,通過分析可以得出右傾時右側的傳感器受力變大,電阻值減小導致輸出電壓值減小,最終形成的壓力分布圖像如圖6(b)所示,圖像清晰易于觀察,可以對使用者起到很好的提醒作用。
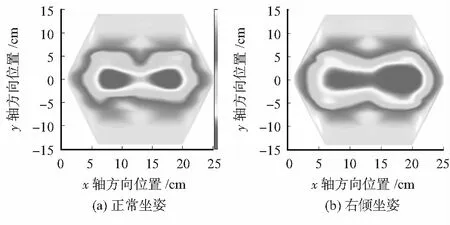
圖6 人體坐姿壓力分布圖像
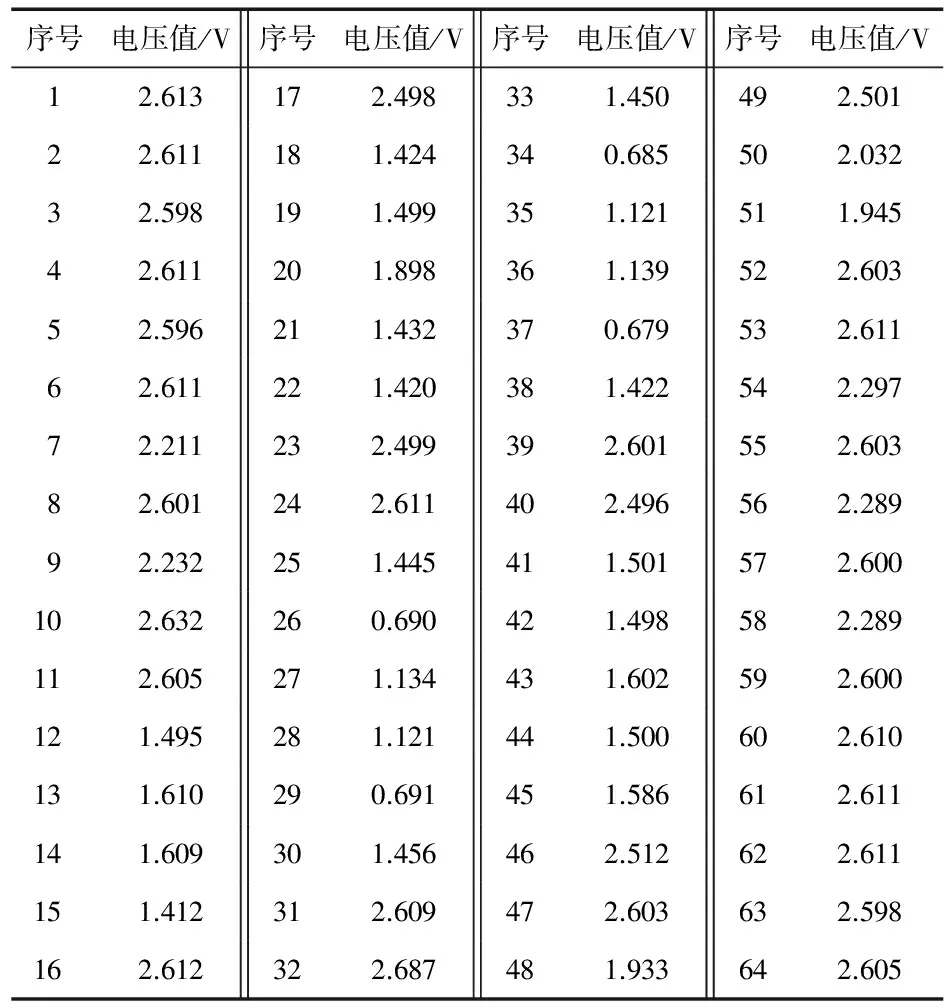
表1 正常坐姿下人體壓力數值
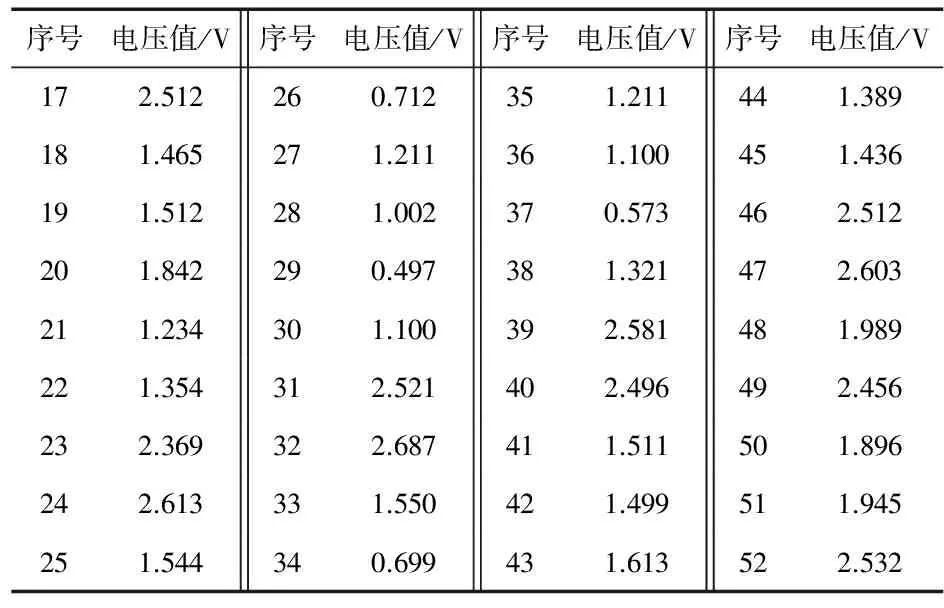
表2 坐姿右傾時部分人體壓力數值
在MATLAB中應用分布式壓縮感知理論,觀測矩陣采用高斯隨機矩陣對信號進行壓縮,并針對JSM—2模型的特點選擇同步正交匹配追蹤算法,選取30個測量值后,最終形成的壓力分布圖像如圖7所示,圖像輪廓一定程度上變模糊,但不影響視覺,證明采用此方法可以有效降低功耗。
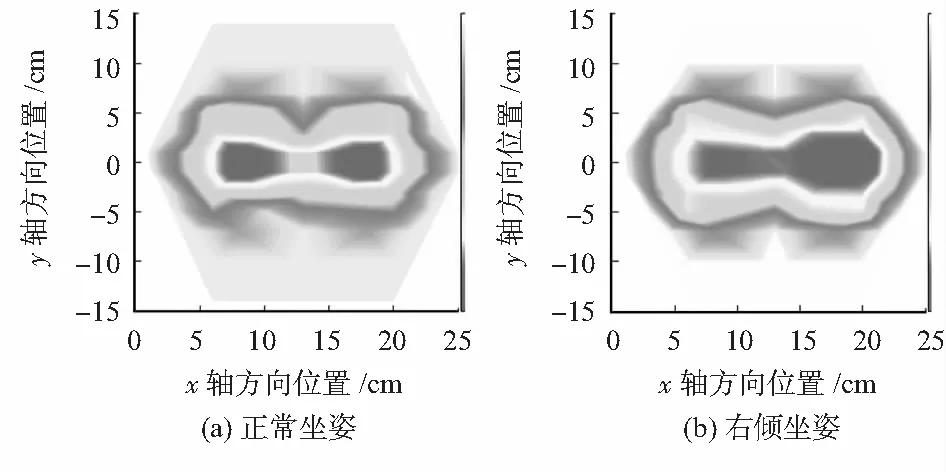
圖7 經過分布式壓縮感知后形成的壓力分布圖像
4 結束語
系統采用64個的導電橡膠設計一種傳感器陣列,通過多路模擬開關與藍牙模塊進行數據采集與傳輸,并在MATLAB
環境下實現了對人體坐姿壓力信號的采集與處理,通過分布式壓縮感知減少采樣數據,最終形成彩色圖像直觀地顯示壓力的分布情況。實驗驗證該系統具有良好的穩定性和分辨率,為搭建人體坐姿壓力分布測量系統提供了便捷低廉的設計方案。
[1] Wettenschwiler P D,St?mpfli R,Lorenzetti S,et al.How reliable are pressure measurements with Tekscan sensors on the body surface of human subjects wearing load carriage systems[J] International Journal of Industrial Ergonomics,2015,49:60-67.
[2] 莊燕子,蔡 萍,周志鋒,等.人體壓力分布測量及其傳感技術[J].傳感技術學報,2005,18(2):313-317.
[3] Bachus K N,Demarco A L,Judd K T,et al.Measuring contact area,force,and pressure for bioengineering applications:Using Fuji Film and TekScan systems[J].Medical Engineering & Phy-sics,2006,28(5):483-488.
[4] 田合雷,劉 平,郭小輝,等.基于導電橡膠的柔性壓力/溫度復合感知系統[J].傳感器與微系統,2015,34(10):100-103.
[5] 楊麗麗.坐姿壓力分布測量系統的設計[D].重慶:重慶大學,2008.
[6] 楊麗麗,皮喜田,彭承琳,等.多點傳感陣列的體壓分布測量系統設計[J].傳感器與微系統,2008,27(8):97-99.
[7] Baron D, Duarte M F, Wakin M B. Distributed compressive sensing[C]∥IEEE International Conference on Acoustics Speech & Signal Processing,2009:2886-2889.
[8] 雷 蕊,沈 為,張之江,等.基于光場的分布式壓縮感知[J].電子測量技術,2014,37(3):20-23.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
