基于車輛動力學的道路坡度與整車質量估計
2018-02-05 03:45:37戴卓吳光強
汽車技術 2018年1期
戴卓 吳光強,2
(1.同濟大學,上海 201804;2.東京大學 生產技術研究所,東京 153-8505)
1 前言
傳統的自動變速器二參數換擋規律僅根據車速和加速踏板開度確定換擋點,存在較大局限性,且制定二參數換擋規律時通常僅考慮平路行駛工況,在上坡行駛工況可能出現循環換擋現象,造成換擋執行元件的反復作用,在下坡行駛工況可能由于駕駛員松開加速踏板或車速暫時升高導致升擋,無法充分利用發動機輔助制動作用,還增加了制動器的工作負擔,尤其是下長坡時容易導致制動器過熱失效。因此,有必要在車輛行駛過程中獲取實時的道路坡度信息,實現適應不同道路坡度的自動變速器智能控制。
整車質量和道路坡度是自動變速器換擋控制中的兩個重要參數,可通過運動學估計、動力學估計等方法得到。Sahlholm[[11]]為試驗車輛加裝了GPS傳感器,通過差分算法獲取實時的道路坡度信息;金輝[[22]]為試驗車輛加裝了加速度傳感器,通過計算汽車坡道行駛時縱向車速差分值與縱向加速度傳感器數值之差,查表得到道路坡度的近似值;趙治國[[33]]根據整車縱向動力學方程,采用最小二乘法對整車質量和道路坡度進行了估計;Wrag?ge-Morley[4]采用自適應非線性觀測器,實現了基于動力學模型的道路坡度估計;Kidambi[5]加裝了半軸轉矩傳感器、縱向加速度傳感器,通過試驗比較了擴展卡爾曼濾波、最小二乘法、線性觀測器等方法的坡度估計效果。
本文基于變速器動力學模型和整車縱向動力學方程,運用卡爾曼濾波和改進型遞推最小二乘法,在不加裝傳感器的前提下實現了對整車質量和道路坡度的實時估計。
2 道路坡度與整車質量估計算法
2.1 整車縱向動力學方程
根據牛頓第二定律,得到整車縱向動力學方程:

式中,m為整車質量;ax為縱向加速度;Fw為驅動力,Fi為坡道阻力,Ff為滾動阻力,Faero為空氣阻力。
根據汽車理論的相關公式,整車縱向動力學方程可寫為:

式中,Ts為變速器輸出軸轉矩;r為車輪滾動半徑;g為重力加速度;α為坡度角;f為滾動阻力系數;ρ為空氣密度;Cd為空氣阻力系數;A為迎風面積;vx為縱向車速;r、ρ、Cd、A、g均為常數。
vx可從CAN總線上讀取,ax可通過對縱向車速微分得到,在半軸或輪胎處加裝轉矩傳感器可得到較為精確的變速器輸出軸轉矩,但是會大幅度增加成本,難以在量產車上得到實現。部分研究采用式(3)估計變速器輸出軸轉矩Ts:

式中,Te為發動機輸出轉矩;ig為當前擋位傳動比;i0為主減速器傳動比;ηT為變速器傳動效率。
實際上ηT會隨變速器擋位、發動機轉速等參數變化,難以通過理論分析或試驗得到不同工況下的ηT準確值,因此式(3)容易帶來較大誤差。基于上述考慮,通過建立變速器動力學模型,采用卡爾曼濾波方法實時估計變速器輸出軸轉矩。
2.2 變速器動力學模型
本文研究對象是某裝配7速雙離合自動變速器(DCT)的乘用車。定義參數i1~i7分別為1~7擋傳動比,ia1和ia2分別為中間軸1和中間軸2與輸出軸間的主減速比,Ie為發動機輸出軸轉動慣量,Ic1為離合器1從動盤、輸入軸1及軸上齒輪對的等效轉動慣量之和,Ic2為離合器2從動盤、輸入軸2及軸上齒輪對的等效轉動慣量之和,Im1、Im2分別為中間軸1、中間軸2的轉動慣量,Te、Tc1、Tc1、Ts分別為發動機輸出軸、離合器1從動盤、離合器2從動盤和變速器輸出軸傳遞的轉矩,ce、cc1、cc2、cm1、cm2、cs分別為發動機輸出軸、輸入軸1、輸入軸2、中間軸1、中間軸2、變速器輸出軸的旋轉阻尼系數,ωe、ωc1、ωc2、ωs分別為發動機輸出軸、離合器1從動盤、離合器2從動盤和變速器輸出軸的轉速。
以1擋穩定行駛為例,假設各齒輪對傳動效率均為η,則1擋穩定行駛時的動力學方程:


1擋穩定行駛時離合器1結合,離合器2完全分離,變速器各軸轉速滿足以下關系:

ωs較難直接獲取,而發動機轉速ωe可直接從CAN總線中讀取,將式(4)整理為ωe的關系式:

上述方程均未考慮同步器的轉動慣量及動態特性,也沒有考慮同步器預換擋對大小的影響,故DCT車輛保持n(n=1,2,…,7)擋行駛時,對應的等效轉動慣量和等效旋轉阻尼系數可視為常數。
設采樣周期為dt,將式(7)離散化得到:

假設系統噪聲均為互相獨立的高斯白噪聲,過程噪聲向量為Wk,測量噪聲向量為Vk,為方便建立DCT傳動系統狀態方程,假設發動機輸出轉矩和變速器輸出軸轉矩的瞬時變化速率較小,即Te≈0,Ts≈0,基于上述假設及式(8)得到1擋穩定行駛時的系統狀態方程和測量方程:
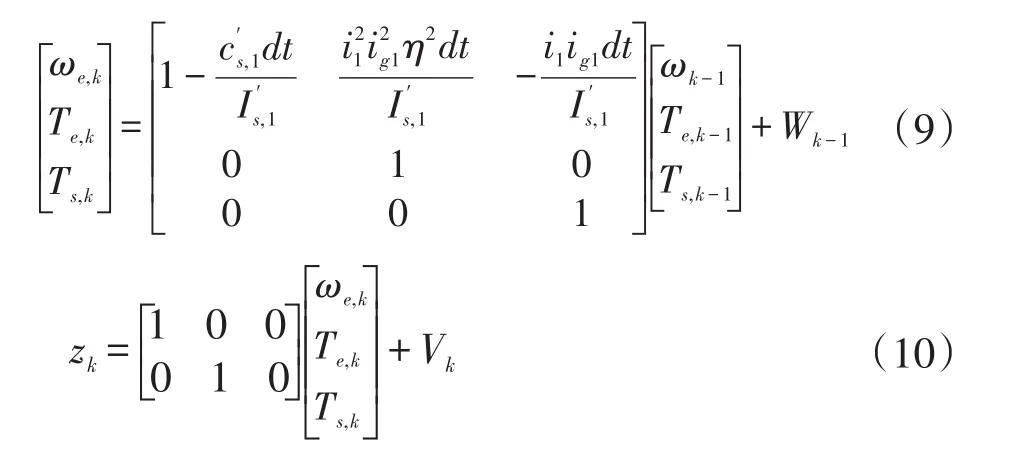
車輛在其他擋位穩定行駛時,均能得到類似的系統狀態方程。
2.3 卡爾曼濾波算法
卡爾曼濾波算法包括以下5個部分,


c. 計算濾波增益矩陣Kk:



式中,Φ為系統狀態轉移矩陣;H為系統觀測矩陣;Qk、Rk分別為過程噪聲協方差矩陣和測量噪聲協方差矩陣。
根據式(9)和式(10)描述的DCT系統狀態方程,采用卡爾曼濾波算法可得到變速器輸出軸轉矩的實時估計值進行道路坡度與整車質量估計時,將作為估計算法的輸入。
2.4 最小二乘估計算法
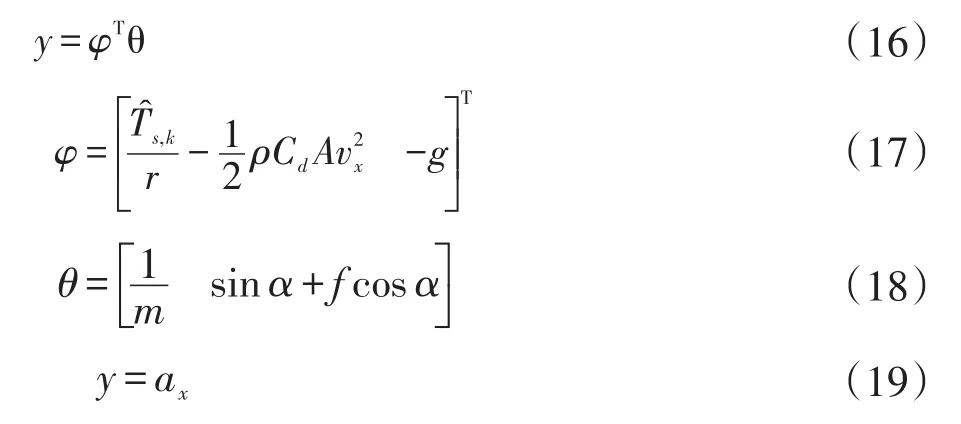
將整車縱向動力學方程改寫成向量乘積形式:
最小二乘法是經典的參數辨識方法,在許多實際問題中得到了廣泛的應用,其基本原理如下,參數估計的誤差成本函數J為:

誤差成本函數J越小,參數θ的估計效果越好,使J取最小值的估計值即為θ的最小二乘估計值,此時J對θ的偏導為0,整理得到最小二乘估計表達式:


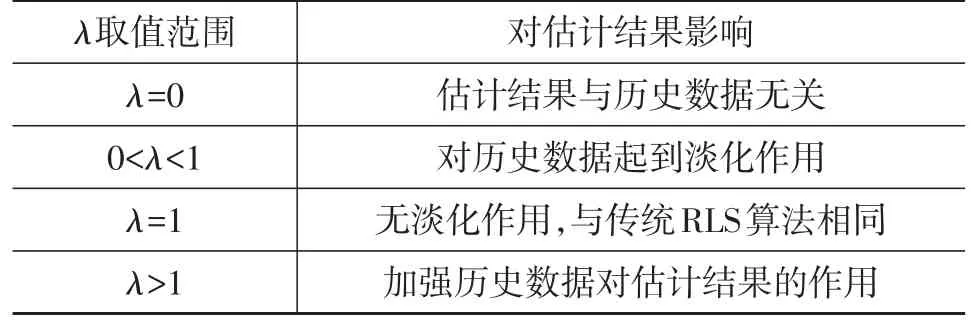
表1 遺忘因子λ對參數估計結果的影響
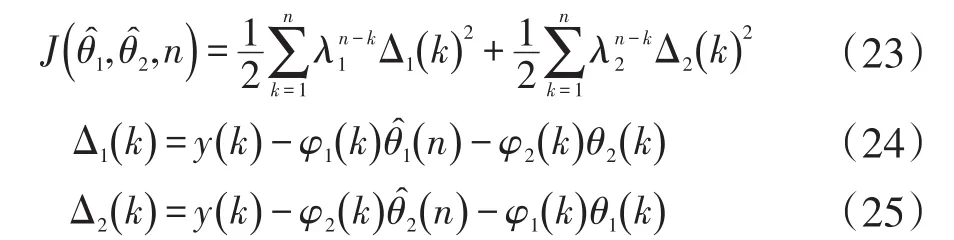
加入遺忘因子的RLS估計算法雖然能實現對時變參數的估計,但是該算法假設所有待估計參數均是同步變化的,車輛實際行駛時整車質量可視為定值,而坡度的時變特性較明顯,若對所有參數的估計均采用同一個遺忘因子,估計算法將按照同一規律對時變參數(坡度)和非時變參數(質量)同時進行校正,造成較大誤差。文獻[6]提出了采用多個遺忘因子的改進型遞推最小二乘估計方法,對于二參數估計問題,設待估計參數為θ1和θ2,遺忘因子為λ1和λ2,則誤差成本函數J為:
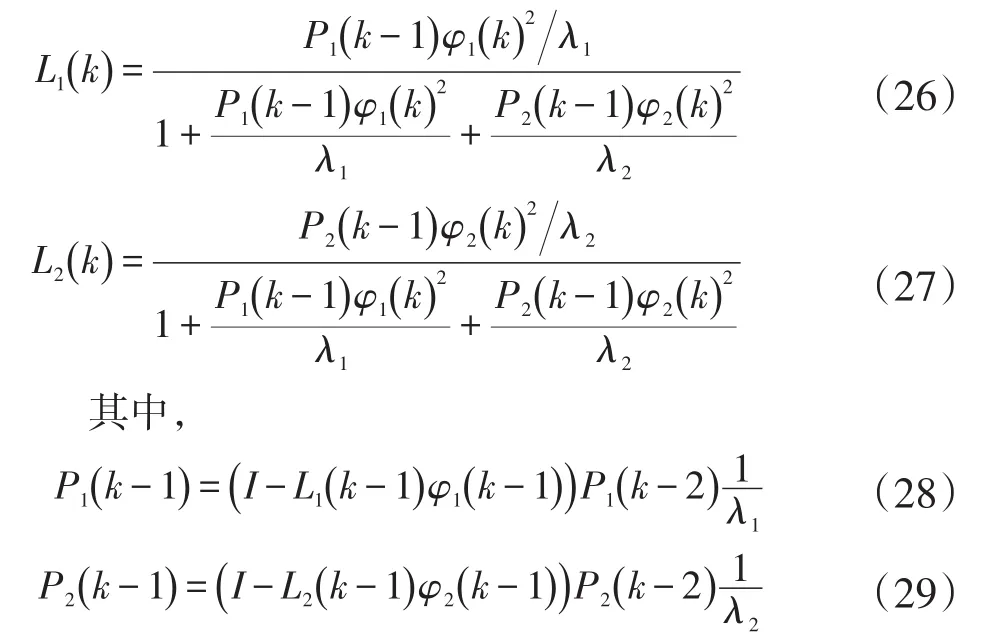
因此,基于式(16)~式(19)描述的整車縱向動力學方程,可利用式(22)~式(29)改進型RLS算法實時估計1/m和sinα+fcosα。其中,sinα+fcosα為等效坡度[7],表示路面滾動阻力和道路坡度對行駛阻力的貢獻,當滾動阻力系數f已知時,可得出實際坡度。
2.5 估計算法流程
設計的實時估計算法流程如圖1所示。
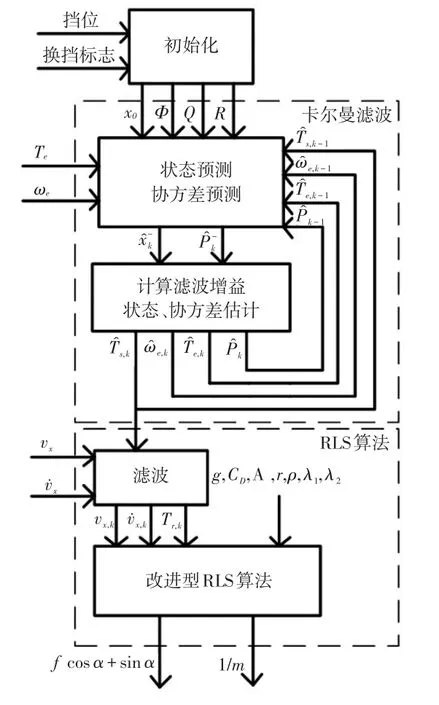
圖1 實時估計算法流程
考慮到停車后總質量可能發生變化,設計在停車時停止運行算法并清空歷史數據,將當前時刻的估計參數作為下次估計的初始值。
3 仿真驗證
在MATLAB/Simulink中建立DCT車輛的縱向動力學模型,用于驗證采用上述整車質量與道路坡度估計算法的可行性。為了充分利用歷史數據得到準確的整車質量估計值,質量估計的遺忘因子在本次仿真中取1.05,由于道路坡度具有較明顯的時變特性,故坡度估計的遺忘因子在本次仿真中取0.8,假設仿真過程中滾動阻力f為常數。仿真得到的結果如圖2、圖3所示。
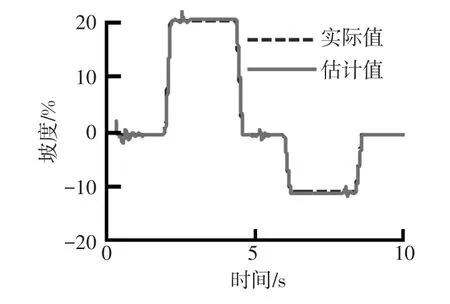
圖2 坡度估計仿真計算結果
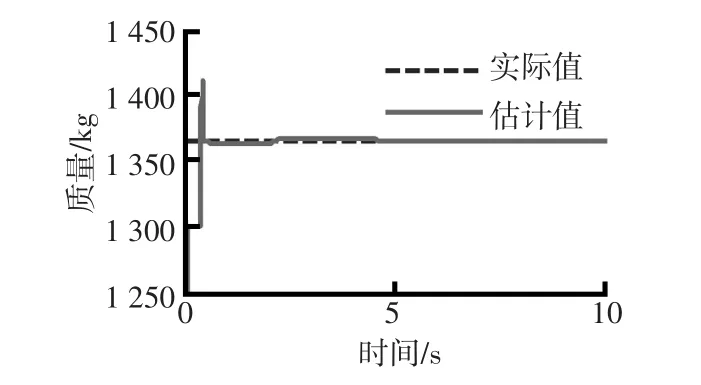
圖3 質量估計仿真計算結果
由仿真結果可知,建立的估計算法可較好地跟蹤坡度變化,坡度估計值在仿真時間的第0.3 s、2.6 s、5.2 s和8.0 s出現了較大波動,這是因為在這些時刻發生了換擋操作,換擋過程中仿真模型變速器輸出軸轉矩出現了較大波動,整車質量估計值很快收斂且與實際值的誤差很小。
4 試驗驗證
4.1 試驗方案
為了驗證所開發的整車質量與道路坡度估計算法效果,采用圖4所示的流程進行實車試驗。
試驗車為搭載7速濕式DCT的乘用車,在平整路段行駛時開始記錄數據,之后進入一段坡度為8%的試驗坡道,通過坡道后繼續在平整路面行駛一段時間后停止記錄數據。估計算法所需的車速、發動機轉矩、發動機轉速等數據均通過采集CAN總線信號得到,采集裝置的采樣周期為0.02 s。
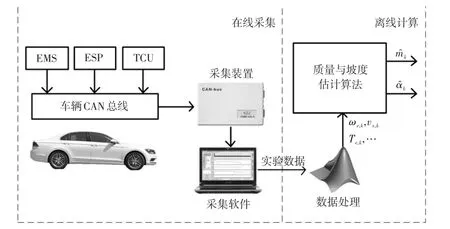
圖4 試驗流程
由于建立的DCT動力學方程未考慮換擋過程,無法準確估計換擋過程的變速器輸出軸轉矩值,在上述試驗數據采集過程中DCT設為手動模式,保持擋位為2擋,且駕駛員全程沒有踩下制動踏板。試驗車的真實質量由整備質量與試驗人員、試驗設備的質量之和得到,圖5為試驗過程采集到的部分數據。
4.2 試驗結果分析
采用圖1所示的估計算法流程對試驗數據進行處理,試驗結果分析用到的部分參數如表2所示,圖6為利用卡爾曼濾波算法估計得到的變速器輸出軸轉矩,圖7和圖8為本次試驗的坡度、質量估計結果。
本次估計中整車質量和道路坡度的遺忘因子分別取1.01和0.4,試驗車整備質量為1 365 kg,故整車質量估計的初始值取1 300 kg,對整車質量的估計在10 s內逐漸收斂,最終整車質量估計值為1 495 kg,而試驗車的真實質量為1 504 kg,可見該算法對整車質量的估計效果較為理想。對道路坡度的估計雖然存在一定誤差和較大噪聲,但是估計值與實際道路坡度值基本吻合,能及時反映實際道路坡度的變化趨勢,對自動變速器坡道換擋控制等具有較好的參考作用。
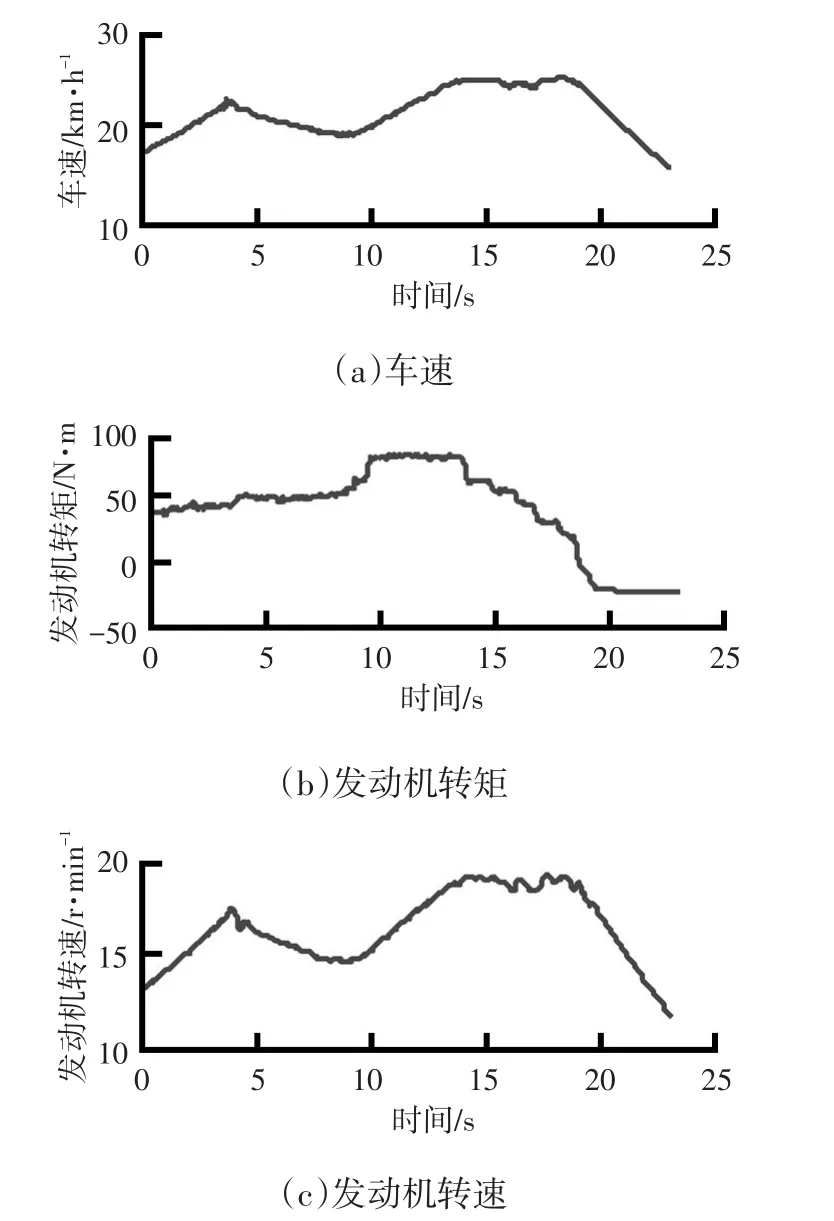
圖5 上坡路段試驗數據

表2 試驗基本參數
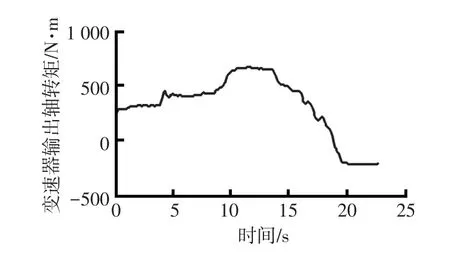
圖6 變速器輸出軸轉矩估計值
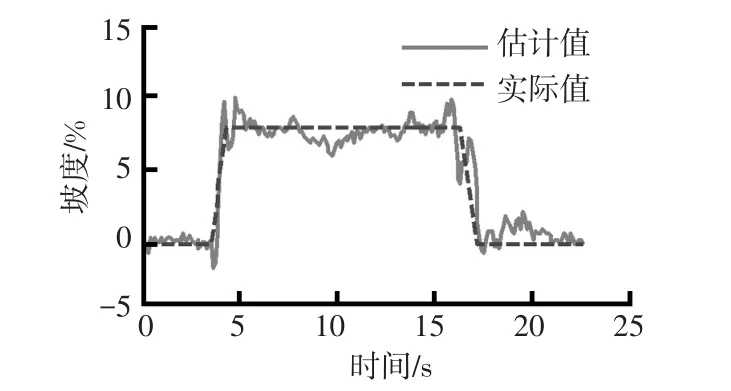
圖7 道路坡度估計試驗結果
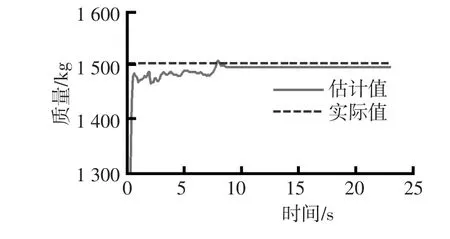
圖8 整車質量估計試驗結果
5 結束語
建立了7速DCT動力學模型,并采用卡爾曼濾波算法對變速器輸出軸轉矩進行實時估計,基于整車縱向動力學模型,開發了運用改進型遞推最小二乘法的道路坡度與整車質量估計算法。設計的估計算法僅需采集CAN總線信號,不必加裝GPS、半軸轉矩傳感器、加速度傳感器等設備,提供了成本低廉的道路坡度與整車質量估計方法。仿真和試驗驗證結果表明,所開發的道路坡度與整車質量估計算法具有較好的估計效果,估計結果可供自動變速器換擋控制和自適應巡航等系統使用。
[1]Sahlholm P,Gattami A,Johansson K H.Piecewise Lin?ear Road Grade Estimation[C]//SAE 2011 World Con?gress and Exhibition,Detroit,12 April 2011.SAE inter?national,2011.
[2]金輝,李磊,李斌虎,等.基于加速度區間判斷的坡道識別方法[J].中國公路學報,2010,23(1):122-126.
[3]趙治國,王琪,刁威振,等.雙離合器變速汽車坡道模糊修正換擋研究[J].中國機械工程,2013(15):2122-2129.
[4]Wragge-Morley R, Herrmann G, Barber P,et al.Gradient and Mass Estimation from CAN Based Data for a Light Passenger Car[J].SAE International Journal of Passenger Cars-Electronic and Electrical Systems,2015,8(2015-01-0201):137-145.
[5]Kidambi N,Harne R L,Fujii Y,et al.Methods in Vehicle Mass and Road Grade Estimation[J].SAE International Journal of Passenger Cars-Mechanical Systems,2014,7(2014-01-0111):981-991.
[6]Vahidi A, Stefanopoulou A, Peng H. Recur?sive Least Squares with Forgetting for Online Estima?tion of Vehicle Mass and Road Grade:Theory and Ex?periments[J].Vehicle System Dynamics,2005,43(1):31-55.
[7]李磊,章國勝,宋健,黃全安.基于等效坡度的自動手動變速器換檔規律研究[J].公路交通科技,2011(02):144-148.
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
產品可靠性報告(2017年7期)2017-09-05 09:49:12
汽車觀察(2016年3期)2016-02-28 13:16:26
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
