基于AT89S52單片機的智能搬運小車設計
2018-02-05 17:29:15彭川桃杜忠杰
無線互聯科技 2017年13期
關鍵詞:單片機
彭川桃+杜忠杰

摘要:在工業生產中,物料搬運費用常常占總生產成本的30%?95%,而智能搬運小車是一種模擬人的搬運動作,按照預定程序,實現物料搬運的機電一體化裝置,代替了人的勞作,大大節省了生產成本。文章基于AT89S52單片機對智能搬運小車設計做簡要分析,對控制器、電機、傳感器等模塊進行選擇和優化。最后通過多次測試得出,這款智能搬運小車能高效地完成搬運任務,可以在工業自動化中發揮出重要作用。
關鍵詞:單片機;智能搬運;工業自動化
各行各業都有搬運過程,隨著經濟的快速發展,人工搬運不能完全滿足市場的需求。而智能搬運小車可安裝在不同的場所以完成不同的任務,因此被廣泛應用于機床上下料、沖壓機自動化生產線、自動裝配流水線、碼垛搬運、集裝箱等的自動搬運。使用智能搬運小車會使得過程質量控制更有效,同時減少了檢測環節,在很大程度上控制了企業的人工成本和質量成本。
1 硬件搭配優化設計
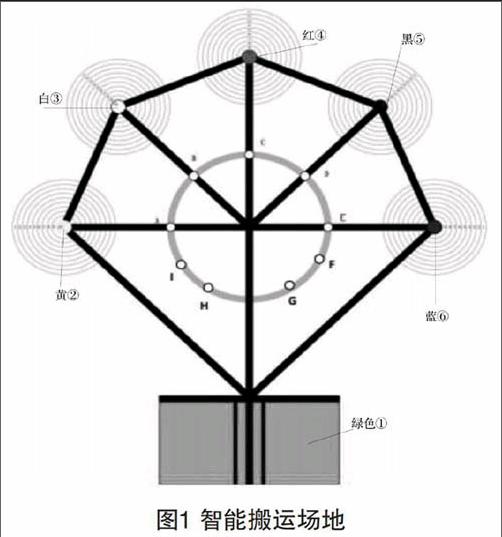
本智能搬運小車是一個基于單片機的輪式移動小車,利用各種傳感器在規定時間內完成智能掃描5個目標物料并準確地將其搬運至指定位置的任務,具體如圖1所示,智能小車要能從綠色①出發區出發,到達場地中心后,自動掃描物料的方向并確定物料的距離,到達可夾取的范圍后,識別區域并將其快速準確地搬運至指定區域,共需搬運5塊區域分別為黃②、白③、紅④、黑⑤、藍⑥的不同的物料,最后回到出發區并停止動作。故本小車系統主要由控制器、直流電機、傳感器等模塊構成。為更好地實現各模塊的交互,經反復論證,最后確定方案如下:控制模塊、電機驅動、線巡跡、物距檢測、顏色識別分別采用AT89S52單片機、L298N集成芯片、DM-S53401灰度傳感器(QTI),HC-HR04超聲波模塊、DM-S28302B顏色傳感器。
2 系統理論分析
2.1 控制模塊
控制模塊采用AT89S52單片機,其性能如表1所示。
AT89S52單片機屬于Atmd公司推出的AT89系列芯片,有以下特點:可重復擦寫1000次以上、低功耗、8位Flash,在系統開發過程中可以十分容易地進行程序的修改,大大縮短了系統開發周期。
2.2 電機驅動模塊
直流電機非常容易實現調速,此次采用集成芯片L298N構成驅動電路。L298N是一款輸入電壓可達50V,輸出電流可達3A,使用PWM控制技術的大電流電機驅動芯片,是雙H橋高電壓大功率集成電路,可用來驅動直流電動機和步進電動機等電感性負載。小車的電機驅動電流一般都在1?2A之間,輸入電壓在9?15V之間,使用單片機控制L298N芯片使之工作在占空比可調的開關狀態,可以精確地調節電機轉速。系統采用脈寬調速技術,通過改變脈沖寬度t來改變電樞回路的平均電壓,從而得到不同大小的電壓值,實現直流電機的平滑調速。
2.3 線巡跡模塊
QTI傳感器是一種紅外傳感器,它利用光電接收管探測其所面對的表面反射光強度。當QTI傳感器面對一個暗的表面時,反射光強度低;面對一個亮的表面時,反射光的強度高。反射光強度的不同對應輸出不同的電平信號。在本文中所使用到的DM-S53401探測到黑線時輸出高電平(5V),探測到白線時輸出低電平(0V)。此次使用6個QTI組成巡線組,根據6個QTI反饋的電平信號換算成一個6位二進制數,針對每種數值對電機發出不同指令,從而實現精準的巡線功能。
2.4 物距檢測模塊
要實現物料的精確擺放,智能小車必須要安裝一個“看得見”的眼睛,使用HC-HR04超聲波模塊,可實現2?400cm的非接觸式距離檢測功能,精度S高達2mm,模塊主要有聲波發生器和接收器以及控制電路組成,它非常方便與單片機連接,只需要TRIG和ECHO兩個10口即可控,給TRIG輸入至少10|is的高電平,模塊自動發射8個40kHz的方波,自動檢測是否有回波。回波通過ECHO返回,ECHO輸出高電平,高電平持續時間就是超聲波從發射到返回經過的時間。
在AT89S52中,回波信號己被其內部程序處理轉變成一個PWM信號從ECHO端輸出,在使用時,只需要讀出PWM信號高電平的時間7,通過發射信號到收到回波的時間間隔計算等到距離。如果沒有檢測到回波,回響信號腳就會輸出140|is的電平,以防止發射信號對回響信號的干擾。
2.5 顏色識別模塊
當小車執行送物料子任務之前,必須先確認被送物料的屬性(顏色),才能發出下一步該往哪個方向走的指令。這個模塊選用DM-S28302B顏色傳感器,它由TCS230感應芯片、白光LED、瞄準鏡和連接線等組成,采用RGB三色原理識別顏色。識別顏色之前,需要進行白平衡調整,使得顏色傳感器對白色中RGB三原色輸出相等。識別顏色時,由TCS230感應芯片對所測顏色的R,G和B參數進行調整。參數調整方法:依次選通3種顏色的濾波器,然后對TCS230的輸出脈沖依次進行計數。當計數到255時停止計數,分別計算每個通道所用的時間,這些時間對應于實際測試時TCS230每種濾波器所采用的時間基準,在這段時間內所測得的脈沖數就是所對應的R,G和B的值,根據R,G和B的值判斷物料顏色。
3 程序設計
程序是智能搬運小車的核心,程序設計分4個子任務:一個是巡線,這個任務貫穿整個搬運過程;第2個任務是測S巨,這關系到取物與送物的精準度;第3個任務是識別顏色,只有獲取了物料的顏色屬性后才能判斷其運送方向;第4個任務,也是最基礎的任務,電機驅動,它控制著小車的前進后退逆轉順轉及其速度。各個子任務相互貫穿相互交互,如圖2所示。為保證小車能夠完成智能搬運,先對每個子任務編寫一個或多個子程序,簡化任務,最后根據系統整體控制方案開發完整的主程序。編好主程序之后進行大量的實驗,調試程序并簡化程序,最終增進搬運小車的準確性與穩定性,實驗及調試過程在此不再贅述。
4 測試與分析
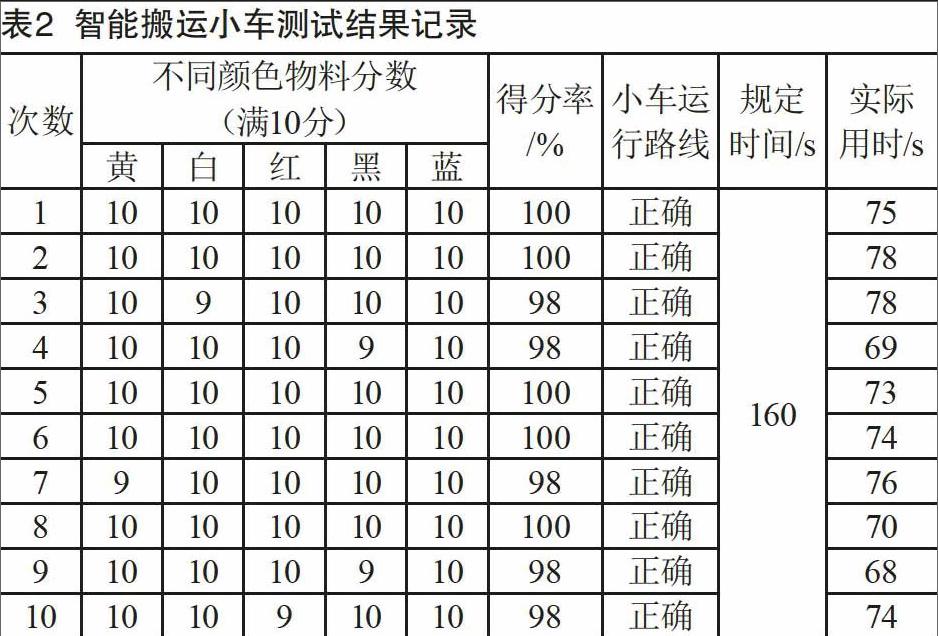
小車調試完畢后,進行了10次搬運測試,結果如表2所示。
測試結果表明,平均得分率高達99%,平均耗時73.5s,低于規定時間的1/2,測試結果優秀。
5 結語
為節約在工業生產中的物料搬運費,減少人工的勞作,本文基于AT89S52單片機設計了智能搬運小車,該搬運小車具有體積小、空間占用少、結構簡單、擴展性好、易于移植等特點。測試表明其能夠應用于工業自動化中的自動化物流系統。
[參考文獻]
[1]孫寶法.微控制系統設計與實現[M].北京:清華大學出版社,2015.
[2]李傳娣,趙常松,李繼超.單片機原理、應用及Proteus仿真[M].北京:清華大學出版社,2017.
[3]彭天然.物料搬運移動機器人機械與控制系統設計與研究[D].合肥:合肥工業大學,2016.
[4]張建民.機電一體化系統設計[M].北京:高等教育出版社,2013.endprint
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
