機載氣象雷達巡航階段目標探測方法及仿真
2018-02-07 06:50:18石海杰李京華
系統(tǒng)工程與電子技術 2018年2期
石海杰, 李京華, 岳 露
(1. 西北工業(yè)大學電子信息學院, 陜西 西安 710072; 2. 中北大學信息與通信工程學院, 山西 太原 030051)
0 引 言
機載氣象雷達是商業(yè)飛機強制安裝的機載電子設備,能夠實時探測航路上的雷暴、湍流、冰雹等災害性天氣,是飛行安全的重要保障。隨著越來越多航線的開通,商業(yè)航班更加繁忙,對于機載氣象雷達的要求也越來越高。傳統(tǒng)的單掃描機載氣象雷達,受雷達地平線限制,只能探測到雷達波束與地球表面相切范圍內的氣象目標。同時,受制于雷達波束寬度的限制,無法同時顯示探測范圍內全空域氣象目標分布情況。為了縱觀全空域氣象目標分布,飛行員需手動調節(jié)雷達波束仰角。調低仰角,探測載機前方近距離空域氣象目標,調高仰角,探測遠距離空域氣象目標。該方法雖然可獲悉全空域氣象目標分布情況,但并不直觀,需飛行員根據(jù)經驗在大腦中合成,過于依賴飛行員經驗,增加了飛行員工作復雜度。由于無法抑制雷達地平線處的地雜波,該方法也不能探測更遠距離氣象目標分布情況。
多掃描技術是新型機載氣象雷達的關鍵技術之一,相關的信號處理算法是關鍵所在,因此國內外許多學者和研究機構對此進行了較多研究。國內方面,西北工業(yè)大學在湍流建模、回波仿真與信號檢測等方面取得相關成果[1-3];中國民航大學研究了風切變回波信號仿真、風速估計和地雜波抑制的相關方法[4-6];國外方面,柯林斯公司依靠其雄厚的技術與資金實力,在多掃描機載氣象雷達的系統(tǒng)組成、氣象信息生成、數(shù)據(jù)顯示、地雜波抑制等技術領域確立了比較領先的地位[7-10];文獻[11]研究了包括多頻率技術、雙極化技術等用于提高危險氣象目標探測效果的方法;文獻[12]提出利用地基雷達數(shù)據(jù)校正星載多普勒氣象雷達波束充塞不一致性的方法,文獻[13-14]利用解垂直相關的方法進行波束充塞不一致性的校正,其實質是利用氣象目標先驗統(tǒng)計特性或者輔助設備獲取的先驗知識進行校正。
以上方法從不同方面研究了機載氣象雷達的相關技術和信號處理方法,但未見有對多掃描具體實現(xiàn)方法做出詳細理論論述和算法研究的。本文旨在對巡航階段氣象目標探測的實現(xiàn)方法進行理論研究,并根據(jù)民航客機在巡航階段的飛行特點,參考柯林斯公司W(wǎng)XR2100型號雷達進行參數(shù)設置,提出針對遠距離全空域氣象目標的多掃描探測方法,以提高氣象目標探測概率與探測精度。
1 多掃描探測模型及其實現(xiàn)算法
1.1 多掃描探測模型
本文所述多掃描方法,是指在垂直方向上采用不同仰角的三波束進行掃描。低仰角波束采用高重復頻率脈沖,提高探測精度,探測近距離空域氣象目標;中仰角波束采用低重復頻率脈沖,提高雷達無模糊作用距離,主要用于探測遠距離空域氣象目標;高仰角波束采用中重復頻率脈沖,探測中距離空域易受地物雜波干擾的氣象目標。對獲取的三波束掃描回波數(shù)據(jù)進行合成,獲取載機前方全空域氣象目標分布情況,為飛行安全提供保障。
巡航階段對民航客機的主要威脅來自于由雷暴引起的湍流、冰雹和閃電等氣象現(xiàn)象,因此本論文的研究以雷暴作為氣象目標。
圖1所示為機載氣象雷達多掃描探測模型示意圖。圖中粗實線代表地球表面,為了研究方便,將地球假設成半徑為r的圓。載機離地高度為h,對于民航客機一般為104m。由載機發(fā)出的3條虛線代表不同仰角的波束,其仰角由載機離地高度和地球半徑等參數(shù)確定。近距離、中距離和遠距離空域范圍由波束仰角和波束寬度來確定。各波束的脈沖重復頻率和脈沖寬度由探測距離和相關雷達參數(shù)確定。
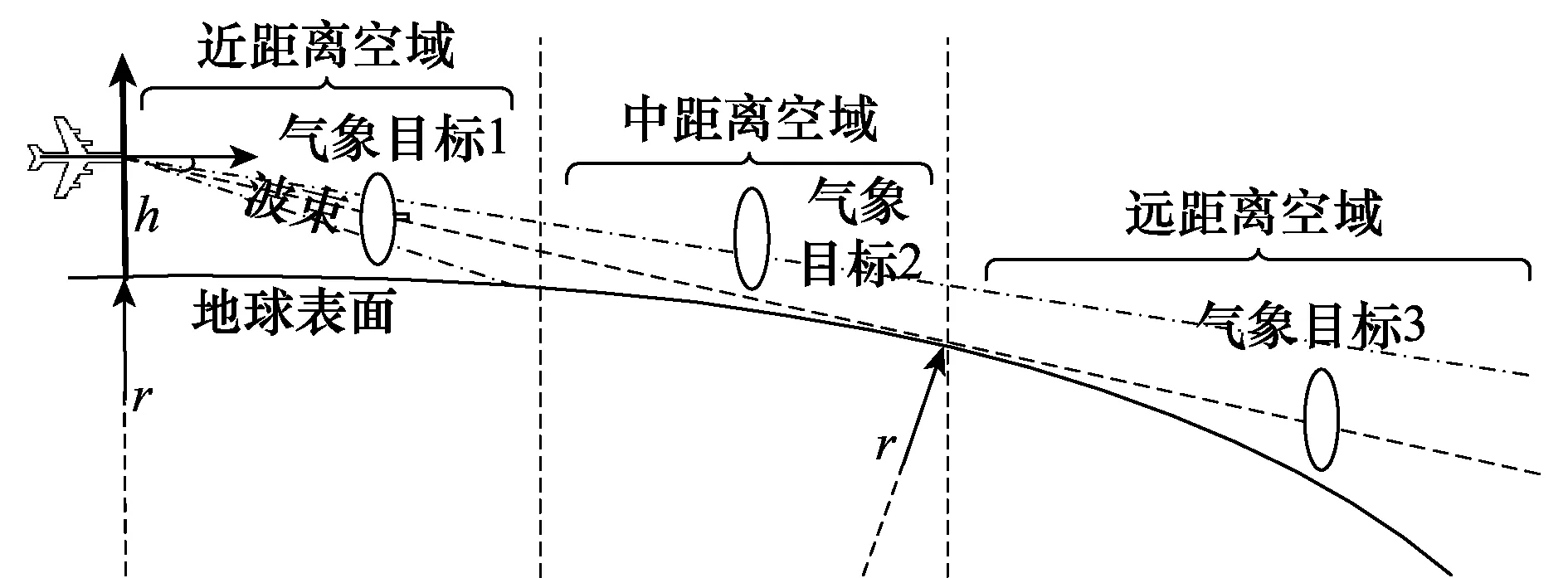
圖1 機載氣象雷達巡航階段多掃描探測模型圖Fig.1 Schematic diagram of multi-scan detection model in cruise stage
設θPL、θPM、θPH為低、中、高波束的仰角。考慮中仰角波束需掠過雷達地平線探測盡可能遠處的氣象目標,因此要求其中心線與地球表面相切;為了讓雷達能覆蓋載機前下方盡量大的范圍,并保證各波束在垂直方向能夠相互覆蓋,低仰角波束上邊沿應與中仰角波束下邊沿重合;考慮高仰角波束主要用于探測中距離空域氣象目標,為了保證波束不受地雜波影響,波束下邊沿最低可略過地平線,即高仰角波束下邊沿與中仰角波束中心線重合。為保證上述關系成立,中、低、高三波束仰角按如下公式計算。
θPM=arccos[r/(r+h)]
(1)
θPL=θPM+φ
(2)
θPH=θPM-φ/2
(3)
式中,φ為雷達波束垂直寬度,由雷達參數(shù)確定。
設X1、X2、X3為雷達到三波束下邊沿與地球表面交點間距離在載機航向上的投影。由式(4)~式(6)可分別解得X1、X2、X3。

(4)

(5)

(6)
可以確定最低仰角波束作用范圍為0~X1;中間仰角波束作用范圍為0~X2∪X3~600 km;最高仰角波束作用范圍為0~X3。設L1、L2、L3為近、中、遠距離空域范圍,取L1∈[0,X2]、L2∈[X2,X3]、L3∈[X3,600] km。
上文所述的“600 km”即是本方法的有效探測范圍,受方法自身屬性限定。中間仰角波束用于探測遠距離空域,其掠過地平線后,一半波束被遮擋,中心線成為波束下邊沿。由于地球曲率的存在,隨著距離的增加,波束下邊沿距地球表面越來遠。假設民航客機在1萬米高度巡航,當波束傳到600 km時,波束下邊沿距地球表面為4.6 km,一般氣象目標分布在4 km高度,因此,比600 km更遠的氣象目標無法有效探測。從需求側考慮,假設客機以1 000 km/h的速度巡航(一般為900 km/h),600 km有效探測范圍至少能夠為飛行員提供超過半小時的繞飛策略制定時間。
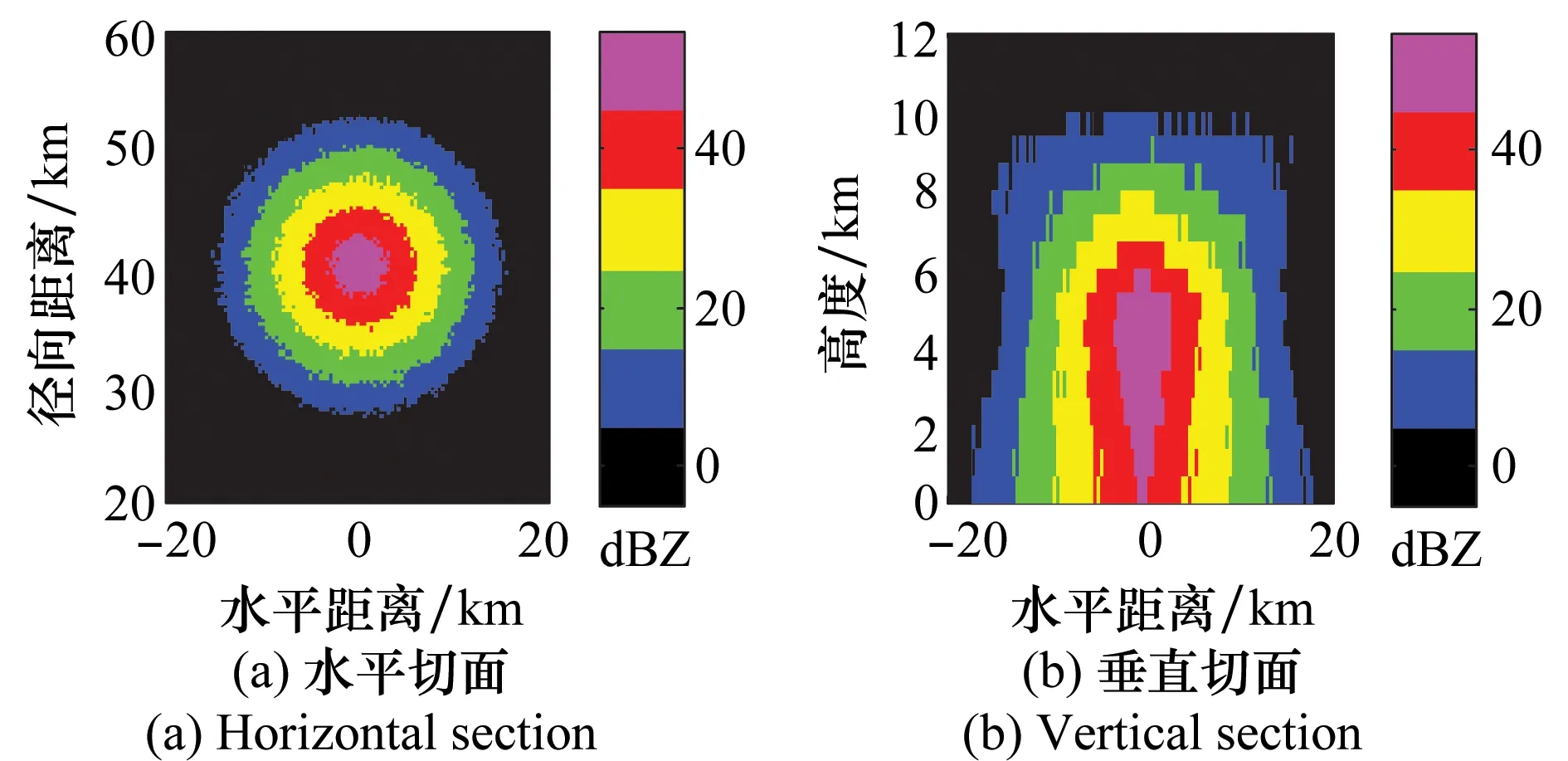
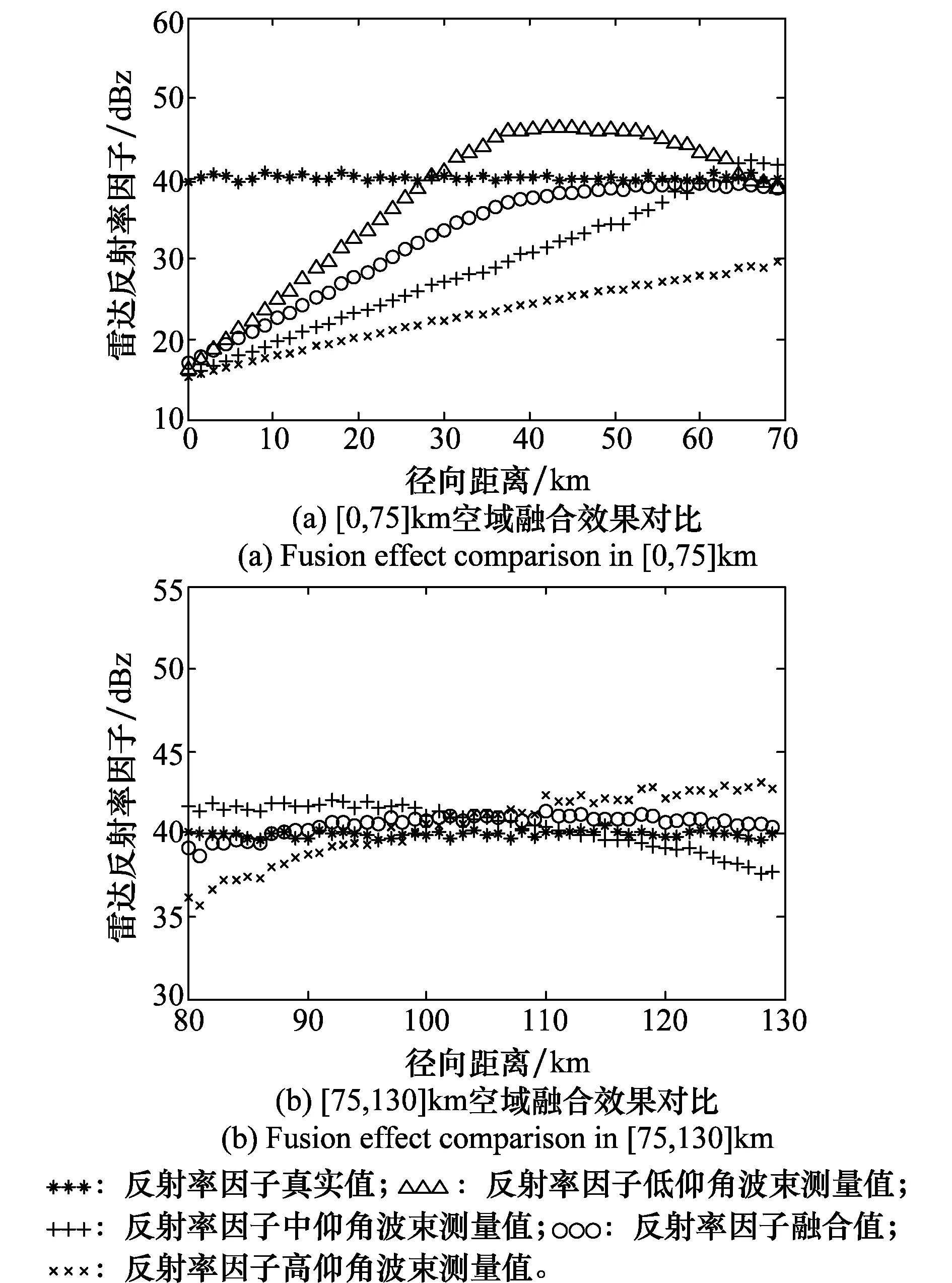
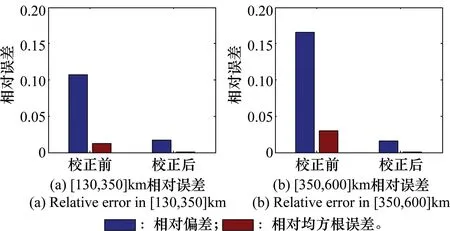
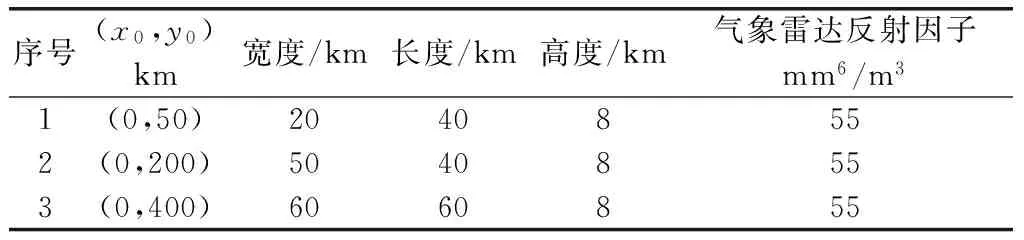
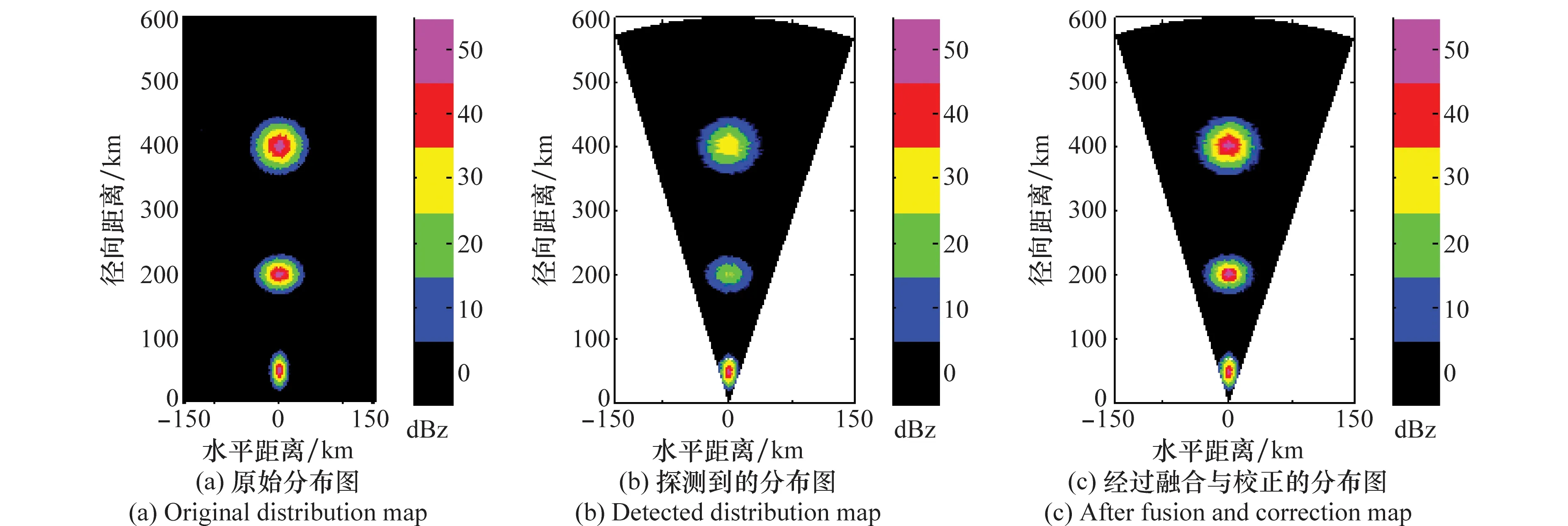
設f1、f2、f3為低、中、高三波束脈沖重復頻率,則f1 (7) 在近距離空域的有效高度(低于104m)范圍內,有多條波束掃過,為了增大波束覆蓋范圍,提高目標被檢測到的概率,采用多波束加權融合的方法。這種方法也避免了局部的強回波造成目標反射率因子被錯誤放大的可能,可以將各波束掃描到的信息有效融合。為了能夠體現(xiàn)各波束對總回波貢獻的不同,本文根據(jù)各波束自身回波強度來確定多波束數(shù)據(jù)融合時的權值w1、w2、w3。計算公式為 (8) 式中,w1、w2、w3為低、中、高三波束的權值;Z1(R,θs)、Z2(R,θs)、Z3(R,θs)為低、中、高三波束測得的氣象目標雷達反射率因子;R為雷達到目標的距離;θs是雷達水平掃描角,取值范圍為[-90°,90°]。近距離空域氣象目標雷達反射率因子為 (9) 充塞系數(shù)是指具有一定波束寬度的雷達測量彌散目標(氣象目標)時,在雷達某一距離門處,彌散目標覆蓋的體積占雷達波束照射體積的比值。由于機載氣象雷達波束在垂直方向上有一定寬度,隨著距離的增加,其在垂直方向上所覆蓋的范圍不斷增大,例如當波束寬度為3.5°時,距離雷達130 km處的波束覆蓋范圍接近8 km。雷暴對雷達的有效反射層一般是低于這一高度的。因此,距離雷達更遠處的波束,實際上沒有被氣象目標完全充滿,而氣象雷達方程是基于氣象目標完全充滿波束的假設條件下得出的,因此,雷達接收的目標回波強度要比按照氣象雷達方程計算得到的回波強度小,故需要對此進行校正。 氣象目標的分布是未知的,充塞系數(shù)也是無法準確測量的,但可以根據(jù)雷達波束寬度以及目標到雷達的距離進行非精確校正,也可以大幅改善測量的效果。設氣象目標對雷達的有效反射高度為h0,α1為中距離空域充塞系數(shù),則α1=h0/(2πRφ/360)。由于中距離空域由高仰角波束探測,該空域氣象目標雷達反射率因子ZL2(R,θs)為 ZL2(R,θs)=Z3(R,θs)/α1 (10) 由于遠距離空域由中仰角波束探測,該波束掃過地平線時,有一半波束被地面遮擋,因此只有半波束掠過地平線,同時由于地球曲率的存在,掠過地平線的雷達波束,離地面有一定高度,并且隨著距離增加離地高度也增大。考慮以上因素,設α2為遠距離空域充塞系數(shù),則 遠距離空域氣象目標雷達反射率因子ZL3(R,θs)為 ZL3(R,θs)=Z2(R,θs)/α2 (11) 巡航階段多掃描機載氣象雷達氣象目標探測算法具體步驟描述如下: 步驟1根據(jù)式(1)~式(3)計算三波束仰角θPL、θPM、θPH,根據(jù)式(4)~式(6)計算三波束作用范圍X1、X2、X3,進而確定近、中、遠空域范圍L1、L2、L3,參考雷達參數(shù)確定各波束脈沖重復頻率f1、f2、f3和對應的脈沖寬度。 步驟2調整雷達波束至θPL位置,完成水平掃描,獲取低仰角雷達波束回波功率PrL(R,θs)。根據(jù)式(7)可得由低仰角波束掃描得到的氣象目標雷達反射率因子: 式中,R∈[0,X1];θs∈[-90°,+90°]。 同理,可依次獲得由中仰角、高仰角波束掃描得到的氣象目標雷達反射率因子: 式中,R∈[0,X2]∪[X3,600];θs∈[-90°,+90°];PrM(R,θs)為中仰角雷達波束回波功率。 式中,R∈[0,X3];θs∈[-90°,+90°];PrH(R,θs)為高仰角雷達波束回波功率。 步驟3根據(jù)式(9)解近距離空域雷達反射率因子: (4) 根據(jù)式(10)解中距空域雷達反射率因子: ZL2(R,θs)=Z3(R,θs)/α1 式中,R∈L2;θs∈[-90°,+90°]。 步驟4根據(jù)式(11)解遠距空域雷達反射率因子: ZL3(R,θs)=Z2(R,θs)/α2 式中,R∈L3;θs∈[-90°,+90°]。 步驟5由(2)、(3)、(4)結果可得全空域氣象目標分布: 步驟6重復以上所有步驟,完成下一個周期的掃描。 仿真過程中涉及到的參數(shù)按如下設置:地球半徑r=6 371 km,載機飛行高度h=10 km。雷達參數(shù)參考WXR2100設置,其中波束寬度θ=φ=3.5°;發(fā)射功率Pt=150 W;天線增益G=34.5 dB;波長λ=3.215 cm;脈沖寬度τ∈[1,25]μs;脈沖重復頻率f∈[180,3 000]pp/s。由于真實氣象目標的雷達數(shù)據(jù)獲取費用較高,且其準確位置、尺度和強度等信息無法獲得,不能用于驗證多掃描算法的正確性。本文采用計算機仿真的方法,根據(jù)單體雷暴模型,在指定位置仿真尺度和強度已知的積云狀氣象目標用于檢測算法的正確性和有效性。仿真時,將氣象目標所在區(qū)域劃分成100 m×100 m×100 m的小區(qū)域,根據(jù)假設的目標模型為每個小區(qū)域賦予一個反射率因子值,根據(jù)離散目標的疊加性仿真雷達回波。圖2所示為仿真的氣象目標的切面圖,圖2(a)為水平切面圖,在某一固定高度的水平切面上,雷達反射率因子呈現(xiàn)中心最大、向四周線性減弱,根據(jù)仿真的尺度參數(shù)呈現(xiàn)橢圓狀分布。圖2(b)為垂直切面圖,由該圖可以看出,在0℃層亮帶(大約4 km)處存在反射率因子的最大值層,向上至某一高度(大約8 km)按指數(shù)衰減至大氣背景反射率因子值(取15 dBz),向下至地面按指數(shù)規(guī)律減弱至某一反射率因子值(取30 dBz)。一方面,這種分布接近真實氣象目標分布,是對真實目標的較好模擬;另一方面,這種分布具有較為明確的分布規(guī)律,能夠驗證多掃描探測算法的正確性和有效性。 圖2 仿真氣象目標切面圖Fig.2 Simulated meteorological target section view 根據(jù)第2.1節(jié)設置的參數(shù),按照第1.4節(jié)所述方法,可以確定近距離空域探測范圍為L1∈[0,130]km,其中,低、中、高仰角波束全部能夠有效探測的范圍為[0,75]km,只有中、高仰角波束能夠有效探測的范圍為[75,130]km。假設氣象目標水平尺度足夠大,能夠覆蓋雷達波束水平范圍,并沿徑向延伸至600 km處,反射率因子最大層強度為55 dBz,向上至8 km處按指數(shù)衰減至15 dBz,向下至地面按指數(shù)規(guī)律減弱至30 dBz。 為了反映氣象目標在高度分布上的隨機性,假設反射率因子最大層是以4 km高度為中心的正態(tài)分布,標準差為0.33 km(根據(jù)正態(tài)分布的3σ原則,保證反射率因子最大層基本分布在3~5 km高度范圍內,比較符合實際)。假設有一束平行于地球表面的理想雷達波束,波束中心離地高度為4 km,波束垂直寬度為4 km,沿氣象目標分布方向傳播,將該波束測得的氣象目標雷達反射率因子作為氣象目標的真實值。 對于[0,75]km空域,三波束對應的權值分別為 wi=Zi(R,θs)/[Z1(R,θs)+Z2(R,θs)+Z3(R,θs)], i=1,2,3 融合后的反射率因子為 ZL1(R,θs)=w1Z1(R,θs)+w2Z2(R,θs)+w3Z3(R,θs) 對于[75,130]km空域,中、高仰角波束對應的權值分別為 wi=Zi(R,θs)/[Z2(R,θs)+Z3(R,θs)],i=2,3 融合后的反射率因子為 ZL1(R,θs)=w2Z2(R,θs)+w3Z3(R,θs) 按照第1.4節(jié)所述方法,在近距離空域的每一個距離門處進行50次蒙特卡羅實驗取測量結果均值,獲得各波束直接測量的雷達反射率因子與多波束數(shù)據(jù)融合后的雷達反射率因子隨距離變化情況的對比圖如圖3所示。其中,圖3(a)為[0,75]km空域三波束數(shù)據(jù)融合效果圖,從圖中可以看出,當目標距離雷達較近時,由于載機飛行高度為10 km,氣象目標的有效反射層高度低于8 km,所有剛從機載雷達發(fā)射出來的波束無法有效照射到氣象目標,不能準確探測很近距離的氣象目標強度;隨著距離的增加,三波束依次覆蓋到了氣象目標,探測到的強度均有所增加,且最低仰角增加的最快;當距離到達40 km時,最低仰角波束照射到氣象目標最強反射層,由于此時波束并不是很寬,因此出現(xiàn)測量值比真實值大的情況;當距離接近70 km,最低仰角波束照到了氣象目標的下部,探測值降低,而中仰角波束覆蓋了氣象目標的最強反射層,此時最高仰角波束測量值有進一步增加,但還是沒有覆蓋氣象目標最強反射層。 圖3(b)為[75,130]km空域中仰角和高仰角波束融合效果圖,從圖中可以看出,隨著距離的增加,中仰角波束測量值由略高于真實值轉為低于真實值,而高仰角波束測量值由低于實際值轉為略高于真實值,兩者融合,正好形成了互補。 圖3 近距離空域多波束數(shù)據(jù)融合效果對比Fig.3 Multi-scan data fusion effect comparison in close range airspace 圖4所示為近距離空域融合前后測量值相對真實值的誤差對比圖,其中圖4(a)為[0,75]km空域相對誤差對比圖,圖中四組柱狀線依次代表低仰角測量值相對真實值的誤差、中仰角測量值相對真實值的誤差、高仰角測量值相對真實值的誤差、融合值相對真實值的誤差。圖4(b)為[75,130]km空域融合相對誤差對比圖,3組柱狀線依次代表中仰角測量值相對真實值的誤差、高仰角測量值相對真實值的誤差、融合值相對真實值的誤差。從圖中能夠看出無論是相對偏差還是相對均方根誤差,經過融合后的值都比單一波束的測量值更加精確,從圖中還可以看出[0,75]km比[75,130]km的誤差要大,這是由于距離載機很近時,無法準確測量氣象目標,誤差較大,從而增大了[0,75]km空域范圍的總體誤差。 圖4 近距離空域融合前后相對誤差Fig.4 Relative error before and after data fusion in close range airspace 根據(jù)2.1節(jié)設置的參數(shù),按照第1.4節(jié)所述方法,可以確定中距離空域為L2∈[130,350]km,遠距離空域為L3∈[350,600]km。中距離空域與遠距離空域距離雷達較遠,波束較寬,因此需要充塞系數(shù)校正。氣象目標分布與第2.2節(jié)假設相同,反射率因子真實值與第2.2節(jié)獲取方式相同,同樣進行50次蒙特卡羅實驗,獲得的充塞系數(shù)校正后的雷達反射率因子與直接測量的雷達反射率因子的對比圖如圖5所示。其中,圖5(a)為中距離空域氣象目標充塞系數(shù)校正效果圖,圖中可以看出,隨著距離的增加,未經校正的雷達反射率因子測量值相對于真實值有明顯的降低,這是由于隨著距離的增加,波束越來越寬,充塞系數(shù)越來越小造成的;經過校正后的雷達反射率因子很好的接近于真實值,沒有明顯的降低。圖5(b)為遠距離空域充塞系數(shù)校正效果圖,同樣可以看出充塞系數(shù)校正對于測量結果起到了明顯的校正作用。除此之外,還可以看出,在接近于600 km距離處,測量結果有較為明顯的下降,即使校正后的結果,也出現(xiàn)了明顯的下降趨勢。這是由于地球曲率的存在,使得地球表面相對于雷達波束有明顯的下降,雷達波束已經無法覆蓋氣象目標有效反射層,這也是有效測量范圍限制在600 km內的原因。 圖6所示為中、遠距離空域充塞系數(shù)校正前后相對誤差對比圖,其中,圖6(a)為[130,350]km中距離空域校正前后相對誤差對比圖,第1組柱狀線代表未經校正的測量值相對于真實值的誤差,第2組柱狀線代表充塞系數(shù)校正后的值相對于真實值的誤差。藍色代表相對偏差,紅色代表相對均方根誤差。圖6(b)為[350,600]km遠距離空域校正前后相對誤差對比圖,柱狀線含義與圖6(a)相同。從圖中能夠看出無論是相對偏差還是相對均方根誤差,經過校正后的值都比校正前的測量值更加精確,從圖中還可以看出[350,600]km空域誤差比[130,350]km空域的誤差要大,這是由于隨著距離的增加,波束越來越寬,充塞系數(shù)越來越小,造成誤差越來越大。 圖5 中、遠距離空域充塞系數(shù)校正效果仿真圖Fig.5 Effect before and after correction in middle and far range airspace 圖6 中、遠距離空域校正前后相對誤差Fig.6 Relative error before and after correction in middle and far range airspace 待探測的氣象目標的位置、尺度、強度參數(shù)見表1。其中目標1屬于近距離空域,目標2屬于中距離空域,目標3屬于遠距離空域。表1中(x0,y0)是氣象目標在以載機為原點的掃描平面內的二維坐標。 表1 氣象目標參數(shù)表 圖7所示為機載氣象雷達全空域多目標探測仿真圖。圖7(a)為仿真氣象目標分布圖,從圖中可以看出3個氣象目標與表1中的一一對應,3個目標位于載機正前方50 km、200 km、400 km處,目標中心強度達到45 dBz以上,沿中心向四周逐漸減弱至10 dBz以下;圖7(b)為未經加權融合與充塞系數(shù)校正處理的雷達回波合成圖,從圖中可以明顯看出在較遠空域范圍的目標2和目標3強度沒有原目標強度大,但能夠探測到有目標且其位置與原目標位置是一致的,這說明多掃描方法是可行的;圖7(c)為經過加權融合和充塞系數(shù)校正的氣象目標分布圖,對比圖7(c)和圖7(a)可以看出,探測到的近、中、遠3個氣象目標的強度分布與原目標是相吻合的,這說明本文提出的方法是有效的,能夠較準確探測0~600 km空域范圍內的氣象目標分布。對比圖7(c)和圖7(a)還可看出,位于遠距離空域的氣象目標3覆蓋范圍似乎有所增大,這是由于波束水平方向具有一定寬度,當傳輸?shù)捷^遠處時其所覆蓋的范圍較大,因此對目標的邊緣造成一定模糊。 圖7 全空域多目標探測仿真Fig.7 Full space, multi-target detection simulation 為了在巡航階段為飛行員提供載機航路前方遠距離、全空域氣象目標分布情況,本文提出了一種多掃面探測方法,并采用加權融合方法提高近距離空域氣象目標探測概率,采用充塞系數(shù)校正方法提高遠距離空域氣象目標探測精度。通過計算機仿真驗證得到如下結論: (1) 加權融合方法綜合利用了多個雷達波束的回波數(shù)據(jù),增大了雷達在近距離空域的覆蓋范圍。同時,由于各波束仰角不同,不會同時掃描到氣象目標的最強反射層,避免局部強回波造成目標反射率因子被錯誤放大的可能。 (2) 根據(jù)雷達波束寬度以及目標到雷達的距離進行的充塞系數(shù)校正,雖然沒有準確測得氣象目標真實的充塞系數(shù),但這種方法簡單有效,可以大幅改善測量的效果。 (3) 本文所提出的機載氣象雷達巡航階段多掃描探測方法能夠有效探測載機航路前方600 km以內的氣象目標分布情況,能夠為飛行安全、航路選擇和繞飛策略提供有效參考。 仿真結果同時表明:由于雷達波束水平方向具有一定寬度,當傳輸?shù)捷^遠處時其所覆蓋的范圍較大,因此對較遠處目標的邊緣造成一定模糊,這是需要再做進一步研究的問題之一。 [1] 于瑩潔,李勇.機載氣象雷達的三維湍流模型和探測仿真方法[J]. 系統(tǒng)工程與電子技術, 2016, 38(2): 293-297. YU Y J, LI Y. Method for detecting and simulating 3D turbulence field of airborne weather radar[J]. Systems Engineering and Electronics, 2016, 38(2): 293-297. [2] 劉小洋, 李勇, 程宇峰. 機載脈沖多普勒雷達湍流信號的仿真分析[J]. 系統(tǒng)工程與電子技術, 2012, 34(5): 920-924. LIU X Y, LI Y, CHENG Y F. Simulation and analysis of turbulence signals in airborne pulse Doppler radar[J]. Systems Engineering and Electronics, 2012, 34(5): 920-924. [3] 于瑩潔,李勇.一種機載氣象雷達湍流信號的檢測方法及仿真[J].西北工業(yè)大學學報,2015(1):159-164. YU Y J, LI Y. A new method for detecting and simulating turbulence signals of airborne weather radar[J]. Journal of Northwestern Polytechnical University, 2015, 33(1): 159-164. [4] 吳仁彪, 韓雁飛, 李海. 基于壓縮感知的低空風切變風速估計方法[J]. 電子與信息學報, 2013, 35(10): 2512-2517. WU R B, HAN Y F, LI H. Wind speed estimation of low-attitude wind shear via compressive sending[J]. Journal of Electronics & Information Technology, 2013, 35(10): 2512-2517. [5] 韓雁飛,劉夏,李海,等.基于微物理特性的三維低空風切變雷達回波仿真[J].系統(tǒng)工程與電子技術,2016,38(2):298-304. HAN Y F, LIU X, LI H, et al. Microphysics-based radar signal simulation for three-dimensional low altitude wind shear[J]. Systems Engineering and Electronics, 2016, 38(2): 298-304. [6] 秦娟,吳仁彪,蘇志剛,等.基于地形可視性分析的機載氣象雷達地雜波剔除方法[J].電子與信息學報,2012,34(2):351-355. QIN J, WU R B, SU Z G, et al. Ground clutter suppression in airborne weather radar via terrain visibility analysis[J]. Journal of Electronics & Information Technology,2012,34(2):351-355. [7] SPERLING S, WOODELL D L, ROBERTSON R E, et al. System and method for providing weather radar status[P].U.S. Patent 8786486, 2014. [8] WILSON J G, BROWN R D, DO K M, et al. System for and method of displaying an image derived from weather radar data[P]. U.S. Patent 8,896,480, 2014. [9] WOODELL D L, FINLEY J A, HOOKER M L. System and method for generating weather radar information[P]. U.S. Patent 7,733,264, 2010. [10] WOODELL D L. Method and system for suppressing ground clutter returns on an airborne weather radar[P].U.S. Patent 6, 603,425, 2003. [11] PAZMANY A L. Investigation of advanced radar techniques for atmospheric hazard detection with airborne weather radar, NASA/CR-2014-218510[R]. Hampton, VA: NASA Langley Research Center, 2014. [12] SY O O, TANELLI S, TAKAHASHI N, et al. Simulation of EarthCARE spaceborne doppler radar products using ground-based and airborne data: effects of aliasing and nonuniform beam-filling[J]. IEEE Trans.on Geoscience and Remote Sensing,2014,52(2): 1463-1479. [13] HADDAD Z S, KACIMI S, SHORT D. A parametrization of vertically-variable horizontal non-uniformity of rain within the GPM-DPR beams[C]∥Proc.of the IEEE International Geoscience and Remote Sensing Symposium, 2015: 5131-5133. [14] DAVID S, KATSUHIRO N, TOSHIO I. Reduction of nonuniform beam filling effects by vertical decorrelation: theory and simulations[J].Journal of the Meteorological Society,2013,91(4): 539-543.
1.2 多波束數(shù)據(jù)融合
1.3 充塞系數(shù)校正
1.4 巡航階段多掃描探測實現(xiàn)算法
2 仿真與結果分析
2.1 參數(shù)設置與氣象目標仿真
2.2 多波束數(shù)據(jù)融合效果仿真

2.3 充塞系數(shù)校正效果仿真

2.4 全空域多目標多掃描探測仿真與分析
3 結 論