聲像定位微型麥克風(fēng)陣列的研究
2018-02-15 03:03:06穆瑞林燕翔聞思夢衣繼釗
中國傳媒大學(xué)學(xué)報(自然科學(xué)版) 2018年6期
關(guān)鍵詞:測量
穆瑞林,燕翔,聞思夢,衣繼釗
(1.天津市輕工與食品工程機(jī)械裝備集成設(shè)計與在線監(jiān)控重點實驗室,天津 300222;2.天津科技大學(xué) 機(jī)械工程學(xué)院,天津 300222;3.清華大學(xué) 建筑學(xué)院,北京 100084)
1 引言
對于聲像的空間定位,山崎[1]在上世紀(jì)80年代提出了近接四點法。上世紀(jì)90年代末,麥克風(fēng)陣列已成為重要研究熱點之一。杜要鋒[2]通過對近場聲源定位參數(shù)的修正,進(jìn)行了時延法的改進(jìn)。金光明等研究者[3]提出了采用兩個L型麥克風(fēng)陣列對近場、遠(yuǎn)場多聲源進(jìn)行定位的方法,并取得了誤差在5%以下的聲源定位精度。李林劍[4]提出了分布式雙麥克風(fēng)線陣聲源定位方法,并與單麥克風(fēng)陣列進(jìn)行了測量精度的對比。張雷岳[5]在互相關(guān)的基礎(chǔ)上引入了頻域加權(quán)算法,增強了抗噪、抗混能力,提高了時延法的定位精度。鐘林波[6]通過時延法進(jìn)行預(yù)估方法縮小譜搜索空間,提高了MUSIC算法的運算速度。但是對于混響狀態(tài)下,麥克風(fēng)陣列的反射聲像定位精度以及測量極限還沒有被探討過。
基于上述背景,通過消聲室內(nèi)四種簡單的反射模型對四點麥克風(fēng)陣列的聲像定位精度進(jìn)行了研究,并通過測量小型混響室內(nèi)壁入射聲能角度分布情況與聲像法模擬結(jié)果的對比,對該麥克風(fēng)陣列的測量極限進(jìn)行了研究與分析。
2 混響室內(nèi)壁入射聲能角度分布
在假設(shè)為完全擴(kuò)散的聲場里,所有點的聲波的行進(jìn)方向都是一樣的。這就相當(dāng)于以聲場內(nèi)壁面上任一點為中心的半空間內(nèi)密集分布著無限小的點聲源的模型。模擬計算材料的隔聲性能和吸聲性能時所使用的入射角度θ的范圍是0-90o。與入射角度θ相關(guān)的聲強入射角度分布情況I(θ)可以用圖1內(nèi)的接受點為中心的單位半球面的模型來計算,如式(1)所示[7]。
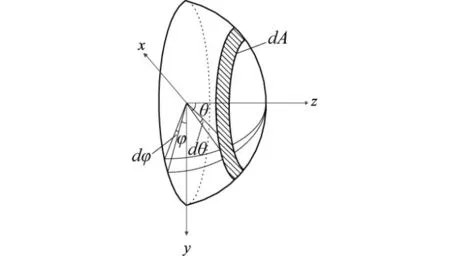
圖1 入射聲強分析模型
(1)
W(θ)為射入dA面內(nèi)的所有聲能,dA可由下式計算。
(2)
3 四點微型麥克風(fēng)陣列
3.1 四點麥克風(fēng)測量原理
近接四點法是山崎[1]等為了測量大型音樂廳,電影院等內(nèi)部聲像空間分布而提出的測量手法。近接四點法的麥克風(fēng)陣列如圖2所示,是由直角坐標(biāo)系的原點設(shè)置的麥克風(fēng)和等距離分布在各軸上的3個麥克風(fēng)所組成。此系統(tǒng)的測量原理是先測量四個麥克風(fēng)的脈沖響應(yīng),然后通過脈沖峰值的大小和各個麥克風(fēng)間的脈沖峰值的時間差來算出聲像的大小和位置。計算順序是先在原點麥克風(fēng)脈沖響應(yīng)波形上找出超過設(shè)定峰值的脈沖信號。然后在此脈沖信號到達(dá)時間前后搜索其他三個麥克風(fēng)脈沖響應(yīng)波形上與此脈沖相對應(yīng)的脈沖。同時,計算各個脈沖的互相關(guān)函數(shù),并把超過所設(shè)定基準(zhǔn)值的聲像找出,標(biāo)定為合法聲像并計算其聲強和位置。按照這樣的方法不斷重復(fù),直到找出脈沖響應(yīng)波形上所有合法聲像并算出其聲強和位置。
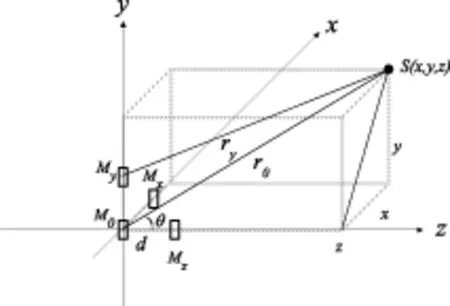
圖2 四麥克風(fēng)系統(tǒng)的構(gòu)成
3.2 脈沖信號分解極限
以圖3實測脈沖信號為例,采樣頻率為48kHz,并經(jīng)逆濾波處理排除雜擾信號。圖3(a)為未做逆濾波處理的脈沖響應(yīng)波形,圖3(b)為經(jīng)逆濾波處理后的脈沖響應(yīng)波形。
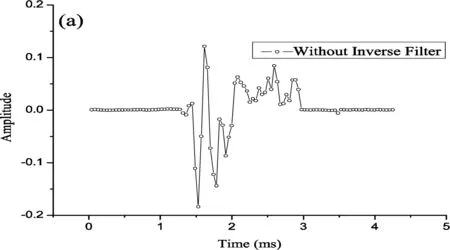
(a)未經(jīng)逆濾波處理
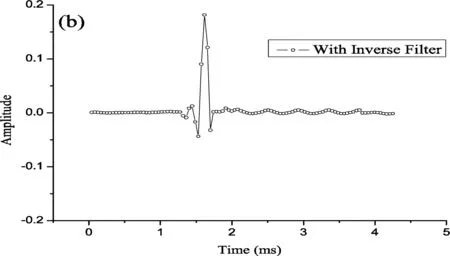
(b)經(jīng)逆濾波處理圖3 實測脈沖響應(yīng)信號
近接四點法是通過分析脈沖信號的時間差來確定聲像位置的。當(dāng)兩個脈沖信號峰值的時間差小于某個特定值時,近接四點法就無法測出該聲像的位置。所以需分析近接四點法脈沖信號的分解極限和可測時間范圍。
在同一脈沖波形上,用于相關(guān)計算的時間幅至少需要3個數(shù)據(jù)點,下一個脈沖也設(shè)為3個數(shù)據(jù)點時,為了使相鄰的脈沖不重合(可分離)至少需要4個數(shù)據(jù)點。脈沖間的4個數(shù)據(jù)點所占據(jù)的時間就是4/fs,即相鄰的脈沖可分離的最小時間間隔為0.083ms。該時間為同一脈沖響應(yīng)波形的脈沖信號可分離時間。根據(jù)L.Cremer的理論可以計算出不同波形之間的可分離的最小時間間隔。比如體積V的長方體室內(nèi),某一點聲源的聲像數(shù)n(t)可以通過下式計算[8]。
(3)
c為聲速,式(4)對時間t求導(dǎo)后的一半即為單位時間入射到邊界上的聲像數(shù):
(4)
每個聲像持續(xù)時長為單位時間內(nèi)入射到邊界面上的聲像數(shù)的倒數(shù):
(5)
將可分解最小時間間隔0.083ms 代入式(5),可測時長可以表示為:
(6)
雖然這個值不是很精確,但提供了一個可參考的測量范圍,在該時長內(nèi)脈沖可以被分離開。事實上,由于一些反射路徑并不存在,故實際值應(yīng)大于此值。而且,也可以通過降低脈沖間的相關(guān)閾值作為解決該問題的對策。
3.3 可測角度極限與改進(jìn)
當(dāng)聲源或聲像位于特定位置時,由于不同的麥克風(fēng)間的脈沖峰值不能被分離,該聲源或聲像將很難被定位,這就意味著可測角度具有測量極限。這個極限與麥克風(fēng)間的距離有關(guān)。如果麥克風(fēng)的間隔大于c/fs,脈沖峰值可以被分離。相反,間隔小于c/fs,這些脈沖將不能被分離開。如圖2所示,y軸上的麥克風(fēng)Mo和My,當(dāng)ro與ry間的差值小于c/fs,該聲源或聲像將無法定位,其他兩軸也是相同的。5cm間隔的麥克風(fēng)陣列的可測角度范圍是8-82°,而3cm間隔的麥克風(fēng)陣列,可測角度范圍為13.5-76.5°。而該測量極限可通過插值與提高采樣頻率的方法進(jìn)行改進(jìn)。
4 定位精度實驗
應(yīng)用四種簡單的反射結(jié)構(gòu)在消聲室內(nèi)對麥克風(fēng)陣列的測量精度進(jìn)行了測試。四類反射體的構(gòu)成如圖4所示,反射板由20mm厚大芯板制成,表面貼敷硬質(zhì)木皮。
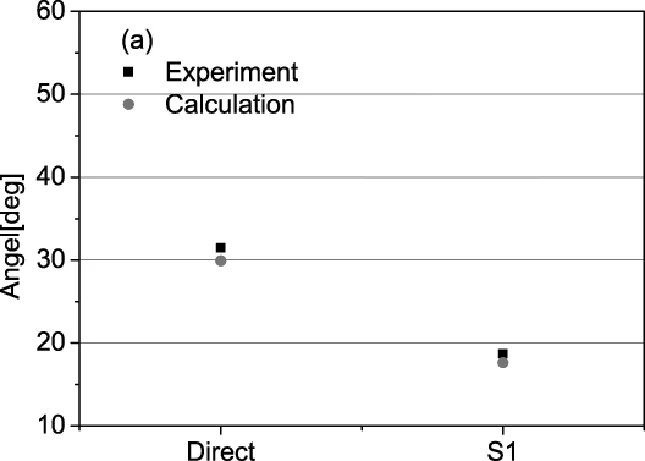
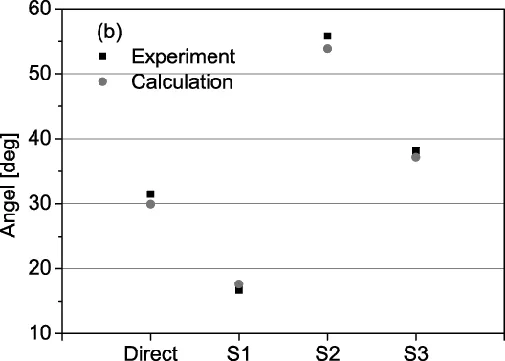
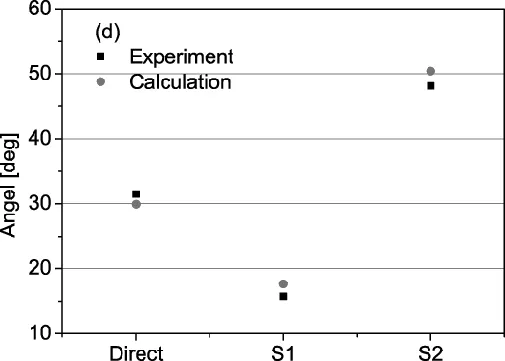
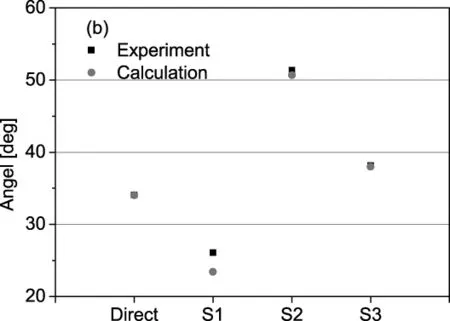
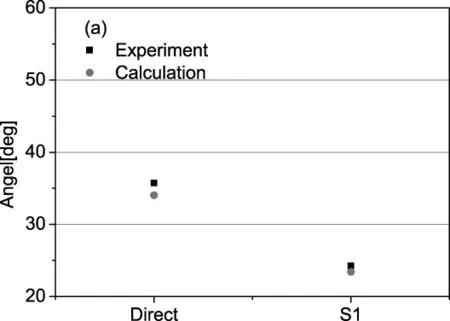
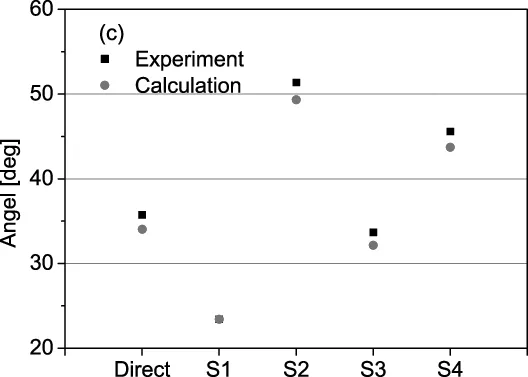
該實驗中使用了3cm和5cm間隔微型麥克風(fēng)陣列。麥克風(fēng)陣列由四個直徑5.5mm麥克風(fēng)(SONY ECM-77B)組成。信號采用TSP信號,由數(shù)字錄音器(SONY PCM-D1)發(fā)出。測量前進(jìn)行了麥克風(fēng)陣列坐標(biāo)校正,并在測量中進(jìn)行了4倍插補。3cm間隔麥克風(fēng)陣列的定位實驗結(jié)果如圖5所示。實驗結(jié)果表明實測入射角度誤差在3.5°以內(nèi)。5cm間隔麥克風(fēng)陣列的定位實驗結(jié)果如圖6所示。實驗結(jié)果表明實測入射角度誤差在3°以內(nèi)。在距麥克風(fēng)陣列2m處設(shè)置小型揚聲器,通過實測檢驗了其可測范圍,3cm間隔麥克風(fēng)可測范圍約為4-86°,5cm間隔麥克風(fēng)可測范圍約為3-87°。

(a)

(b)

(c)
(d)圖4 四類反射體結(jié)構(gòu)圖
(a)
(b)
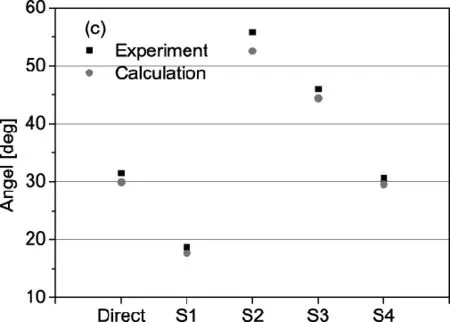
(c)
(d)圖5 3cm間隔麥克風(fēng)陣列測試精度對比圖
(a)
(b)
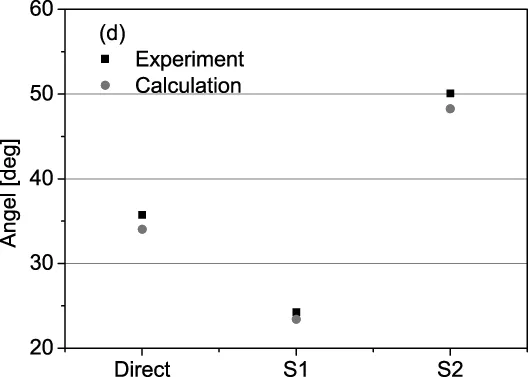
(c)
(d)圖6 5cm間隔麥克風(fēng)陣列測試精度對比圖
5 小型混響室實驗
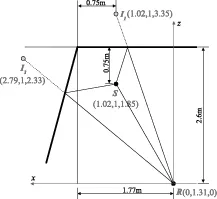
5.1 實驗設(shè)置
小型混凝土混響室的結(jié)構(gòu)如圖7所示。聲源設(shè)置在S1、S2和S3,R1,R2是接收點,空間位置如圖8所示,圖9為實際測量照片。由驅(qū)動單元通過一根2.08m長內(nèi)徑7mm的亞克力管在混響室內(nèi)指定聲源位置輸出時延脈沖信號,以此來模擬點聲源。在混響室內(nèi)壁測試平面背部設(shè)置了一個寬頻高吸聲性能的消聲箱以實現(xiàn)消除反射聲壓與開口尺寸的影響[9]。5cm間隔麥克風(fēng)陣列定位精度與測試角度極限均強于3cm間隔麥克風(fēng)陣列,但是其差別并不很大,且該麥克風(fēng)陣列測試是為了獲得接收點的聲壓,陣列空間尺寸越小越能反映點的真實情況,因此在測試中選用了3cm間隔微型麥克風(fēng)陣列。而且,實測過程中考慮了驅(qū)動單元、麥克風(fēng)、溫度及管道長度的影響。
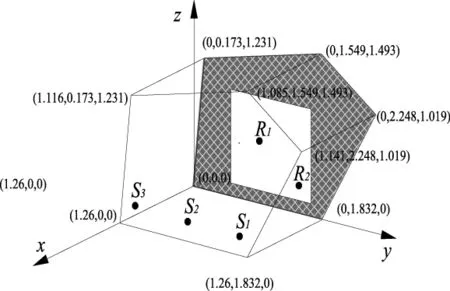
圖7 小型混響室結(jié)構(gòu)圖
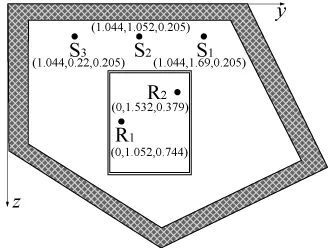
圖8 聲源和接收點空間位置圖

圖9 實測照片
由式(1)計算聲強的過程中計算面積dA保持不變,而△θ隨著角度變化,初始的角度變化量△θ設(shè)定為5°。為使曲線平滑,在△θ±2.5°的范圍內(nèi)進(jìn)行了加權(quán)移動平均處理。
5.2 結(jié)果與討論
實測與聲像法模擬的入射聲能角度分布結(jié)果如圖10所示。紅實線為實測結(jié)果,黑虛線為聲像法模擬結(jié)果。從實測到的聲像與模擬出的聲像對比結(jié)果,可以發(fā)現(xiàn)四點麥克風(fēng)陣列只能探測到早期反射聲像,接近混響狀態(tài)時已經(jīng)不能探測出聲像。這也就是說四點麥克風(fēng)陣列所探測到的基本上是直達(dá)聲和早期反射聲的能量。100ms以上聲像不再能被探測到,100ms聲像探測失效可能與空間的容積有關(guān),也就是與聲音反射平均自由程有關(guān),在本試驗小空間條件下為100ms,在音樂廳、體育館等大空間,平均自由程大很多,這一數(shù)值還將放寬。另外,100ms以后的聲像定位失效、且實測平均能量僅為模擬結(jié)果的40%,很有可能是經(jīng)過多次混響空間聲反射后,房間的界面與虛聲源的距離已經(jīng)很遠(yuǎn),界面尺寸相對聲程而言變小,輻射角變得很小,界面邊緣的散射作用不可忽視,故鏡面反射的條件不再像前幾次反射那樣理想,所以定位效果和能量估算(散射原因失去了)變差。實際上,多次反射后,聲音對界面而言,已不再是鏡面反射行為了,這時駐波已經(jīng)開始建立,逐步進(jìn)入房間共振狀態(tài)了。
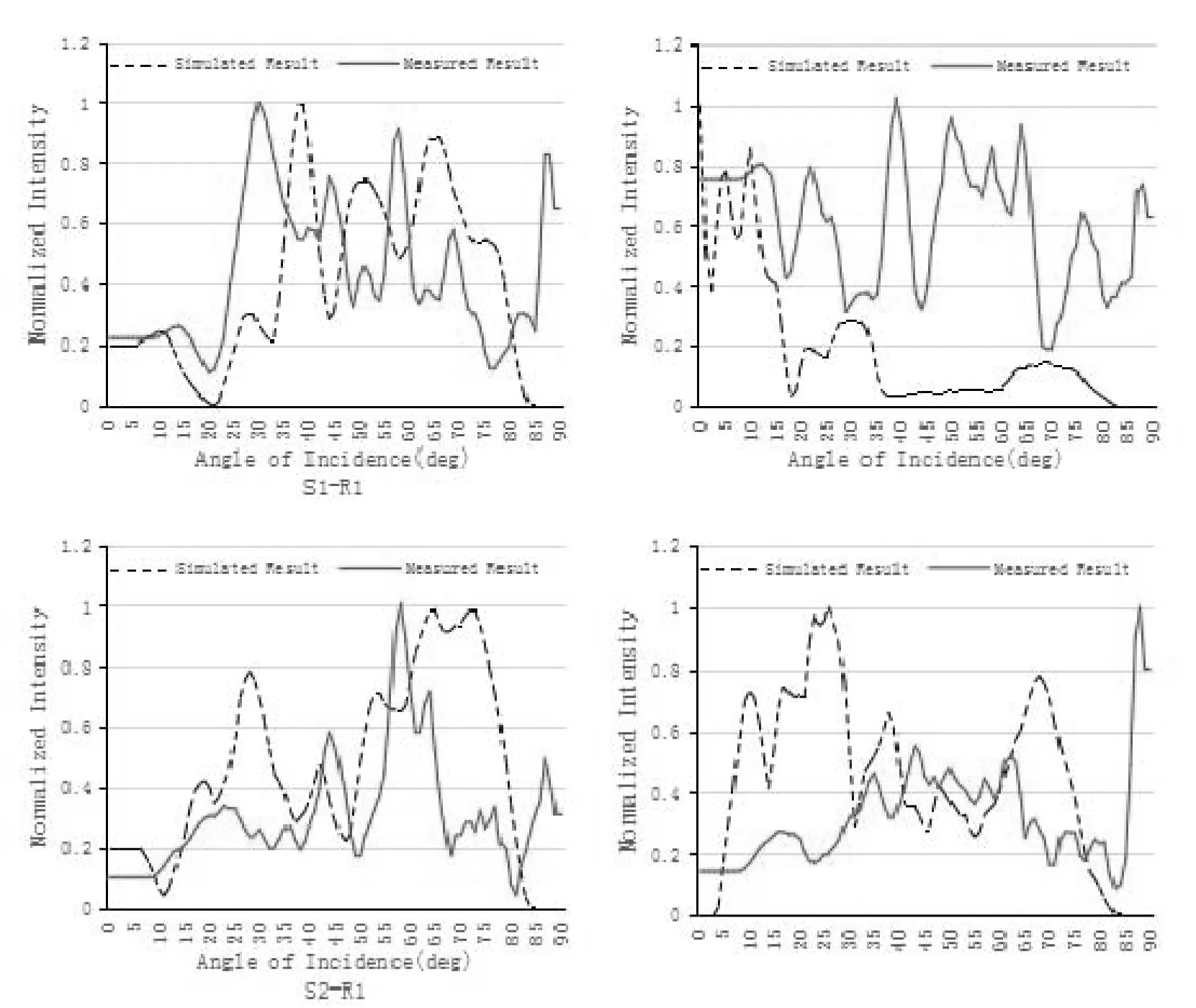
圖10 入射聲能角度分布的模擬與實測結(jié)果對比
6 結(jié)論
針對四點微型麥克風(fēng)陣列的定位精度在消聲室內(nèi)進(jìn)行了四種簡單的反射模型的聲像定位精度實驗。實驗結(jié)果表明:5cm間隔麥克風(fēng)陣列定位精度與測試角度極限均略強于3cm間隔麥克風(fēng)陣列。3cm間隔麥克風(fēng)陣列定位誤差在3.5°以內(nèi),可測范圍約為4-86°。而5cm間隔麥克風(fēng)陣列定位誤差在3°以內(nèi),可測范圍約為3-87°。通過小型混響室內(nèi)的聲像定位實驗發(fā)現(xiàn):四點麥克風(fēng)陣列所探測到的聲能基本上來源于直達(dá)聲和早期反射聲,有效探測時長約為100ms。而且通過實測到的聲像能量與聲像法模擬的聲像能量對比發(fā)現(xiàn),平均實測能量僅為模擬結(jié)果的40%左右。
綜上所述,四點微型麥克風(fēng)陣列可用于自由聲場或反射聲像較少的封閉空間的測量,但不適用于較為復(fù)雜的反射聲場的聲像定位。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00