基于極限學習機的高鐵永磁直驅電機轉子位置預測
2018-02-21 10:02:38呂光春秦斌祝興星
新型工業化 2018年11期
呂光春,秦斌,祝興星
(湖南工業大學,湖南 株洲 412007)
0 引言
牽引電機是高速動車組傳動系統的核心部件之一,完成從電能到機械能的轉換,其性能很大程度上決定了動車組的性能。目前我國的高速動車組的牽引電機主要采用三相異步電機,雖然三相異步電機在大功率應用場合有其獨特的優勢,然而,其體積和重量大,而效率一般最高能達到94%,而且大多采用強迫通風的方式,使得系統的維護工作量大,噪音也大。三相異步牽引系統的技術特點使得其很難滿足新一代牽引系統的性能要求,而永磁同步電機相對于三相異步電機來說,具有更高的能量密度、更高的功率因數和更高的效率等特點;與同容量的異步電機相比,永磁同步電動機可以將體積和重量減少15%~30%。穩定的速度,強大的過載能力,低噪音和高可靠性的優越性能使得永磁同步電機成為新一代牽引電機的不二之選[1-3]。
目前,我國已經開發了用于高速動車組的大功率永磁同步電機,而新一代永磁牽引系統尚處于研究試驗階段。
由于電機驅動系統的強耦合、非線性以及其運行工況的復雜性,使得電機轉子位置信息的獲取很難通過計算獲取,而通常情況下是在電機的轉軸上安裝物理的位置傳感器獲取,例如,數字編碼器,光電傳感器,旋轉變壓器等。實現矢量控制系統的關鍵是能夠準確地獲得轉子位置信息。但是安裝傳感器除增加了系統成本和復雜性之外,還會由于電機內部復雜電磁環境而導致傳感器故障從而嚴重影響到控制系統的性能,降低了控制系統的穩定性。轉子位置預測技術可以大大降低了電機驅動系統的成本,減少了維護工作量,提高了系統的可靠性。 目前,針對電機轉子位置預測的研究已是日漸成熟,而電機轉子位置預測技術大致可分為三種分別是:
(1)依賴于電機自身固有的動態模型的方法,如:直接計算法、模型參考自適應法(Model Reference Adaptive System, MRAS)[4-6]等;
(2)采用現代控制算法對根據電機的非線性模型對其進行線性化來求解并預測出電機轉子的位置信息,也稱觀測器法,如:自適應全階磁鏈觀測器法[7]、滑模觀測器法[8]、人工神經網絡、擴展卡爾曼濾波法(Extended Kalman Filters,EKF)[9]等;
(3)利用轉子的凸極效應或齒槽效應,采取或注入跟轉子運動相關的高頻信號,通過這一信號確定轉子的位置信息,如轉子齒諧波法、高頻信號法[10]等。
其中高頻信號法是利用定子側注入的三相平衡高頻電壓或電流信號來檢測凸極位置從而得到轉子的轉速信息的方法, 這種方法不受電機參數和工作條件的影響,與上述幾種方法相比在低速環節有著較高的精度。雖然這種方法不受電機參數和工作條件的影響,但是該法在原理上是利用轉子的凸極效應,通過轉子的位置變化,引起注入的高頻信號的變化,通過高頻信號的變化檢測轉子的位置信息,這就對信號的檢測技術需要很高的要求。而且,對于高速動車組這樣大容量牽引電機來說,對高頻信號頻率的選擇也有一定的限制。
基于人工神經網絡的方法,通常,神經網絡和MRAS結合構成MRAS- Neural Net控制,以經過訓練的神經網絡作為模型參考自適應系統的可調模型。使用誤差反向傳播算法代替自適應法則來估計轉子的位置。核心思想是使用神經網絡無限接近任何非線性系統的能力,以表現其出色的識別精度。目前,該方法常與其他現代先進算法組成神經網絡自適應的預測模型,從而成為研究的一個熱點[11]。對于神經網絡一般采用多層隱含層神經元結構,采用梯度下降法對網絡進行求解,這樣一來,雖然提高了網絡的精確度,但是網絡結構的建立依賴于網絡中的多個參數,也增加了訓練的時間,這種需較長時間進行計算的算法用于檢測和預測電機轉子的位置效果較差。本文將采用單隱層反饋神經網絡(Single-hidden Layer Feedforward Neural Networks),使用ELM算法進行網絡的求解。
ELM是南洋理工大學黃廣斌(Guang-Bin Huang)教授于2006年提出的一種新算法,用于求解SLFNs。與之前的傳統采用梯度下降的訓練方法相比ELM實際上是將對網絡非線性方程組的求解簡化為對線性方程簇參數的求解,因此ELM方法具有收斂速度快,避免了梯度下降容易造成的局部解,提高了求解網絡的泛化性能等優點[12]。ELM通過學習同樣能將復雜而又龐大的非線性映射準確表達出來。本文將介紹高速動車組用永磁同步電機的矢量控制系統及其特點,重點分析引入ELM算法對電機的轉子信息進行檢測,并進行仿真驗證。
1 牽引用永磁同步電機數學模型
作為高速動車組的牽引電機,需要在十分惡劣的工況下長時間運行,對電機的性能要求十分苛刻。隨著對牽引性能的要求不斷提升,及綠色發展的需要,永磁同步電機越來越凸顯它的優越性。根據牽引系統運行的性能要求,經過合理的設計,牽引用永磁同步電機選用了永磁體內置式結構,內置式永磁同步電機(Interior Permanent Magnet Synchronous Motor, IPMSM)結構機械性能更好,磁阻轉矩能得到更好的利用,有更好的系統兼容性,同時電機的恒功區更寬[13]。因此本文將采用用于高速動車組的內置式永磁牽引電機進行數學建模和轉子位置檢測和預測。
在一系列假設條件下[14],在d-q軸系下列寫的IPMSM的磁鏈方程、電壓方程、轉矩方程如下:


上式中ψd、ψq為d-q坐標系下的定子磁鏈分量,ψf為內置于轉子永磁體磁鏈,Rs為定子電阻,Ld、Lq為直、交軸同步電感分量,ωe為定子磁鏈矢量的角頻率,id、iq為定子電流矢量在直軸和交軸上的電流分量,ud、uq為定子電壓矢量在直軸和交軸上的電壓分量,Te為電機的電磁轉矩。
對于同步電機,有:

式中ωr為轉子的位置。
將(1)、(4)式帶入(2)式得:

從(5)式可以看出,在d-q軸系中以及電機參數確定的條件下,轉子的位置只與d-q軸系下的電壓、電流及電流變化量有關。而d-q軸系下的電壓、電流是由自然軸系通過線性變換得到,即可將上述方程描述為轉子的位置與定子電壓矢量和定子電流矢量相關。同時,由于永磁直驅電機的運行是一個動態過程,其狀態的變化前后密切相關。
2 基于極限學習機的IPMSM位置參數預測原理
IPMSM基于id=0的矢量控制框圖如圖1所示,其控制性能主要依賴于對電機轉子位置信息的準確提取,傳統方法是位置傳感器安裝在轉軸上,然后用經過訓練的極端學習機代替位置傳感器,以檢測電動機轉子的位置,但是這種方法因電機固有的機電和檢測電路的延遲使得到轉子的位置信息的檢測具有一定的滯后性。
對于SLFNs結構如圖2所示,ELM通過生成隨機的初始化輸入權重和輸出層的偏置,導入輸入、輸出訓練數據就可確定并得到相應的輸出權重,進而確定整個的網絡結構。
由圖2可知,可以將一個樣本為N,具有L個隱含層神經元的SLFNs表示為:


圖1 IPMSM基于id=0的矢量控制框圖Fig.1 Based on rotor field oriented control block diagram

圖2 單隱層神經網絡結構圖Fig.2 SLFNs structure chat
其中j=1,2,…,N,wi為輸入權重,βi為輸出權重,bi是第i個隱含層單元的偏置,oj為網絡的輸出。wi·xj表示wi和xj的內積。
在上文建立的IPMSM動態數學模型中,可以發現在d-q軸系下的電機電壓方程中雖含有電機的轉子位置信息,但是電機的強耦合性、非線性,使得轉子的信息很難準確地通過計算提取,但是通過試驗取得的實際數據訓練的SLFNs可以逼近任意的非線性方程。根據這一特點,通過獲取易取得的定子電壓、電流,與儲存在寄存器中前一時刻獲取的電機轉子的位置和轉速,使用SLFNs逼近當前定子電壓和電流、前一時刻位置和轉速與當前電機位置和轉速、下一時刻轉子位置、電磁轉矩的關系。
對于一個用于逼近這種復雜關系的SLFNs,其輸入層、輸出層分別為:

其中,N為訓練數據數量,X為輸入變量矩陣,Y為輸出變量矩陣。θk-1為上一時刻轉子位置,nk-1為上一時刻轉子的速度,uabc=[uab,ubc,uca]T為定子三相電壓,iabc=[ia,ib,ic]T為三相定子電流,θk為當前時刻轉子的位置,θk+1為下一時刻轉子位置的輸出,nr為當前時刻轉子的速度,Te為當前時刻電機的電磁轉矩。
由上述確定了輸入層有8個神經元,對應著8個輸入變量,假設隱含層有L個神經元,對應L個隱層節點,輸出層有4個神經元,對應4個輸出變量,設隱含層神經元的激活函數為g(x),則期望的該單隱層神經網絡的輸出T為可表示為:

采用ELM算法的單隱層反饋神經網絡學習目標是使得確定上文所提到的網絡的輸出權重,確定網絡結構并最小化網絡輸出和實際輸出之間的誤差,即:

即存在βi,wi和bi使得

得到:

其中,j=1,…,N,wik表示輸入權重,βik表示輸出權重。
式(8)可表示為:

其中矩陣T’為矩陣T的轉置;矩陣H為神經網絡的隱含層輸出矩陣,具體形式如下:

對于矩陣H的求解,解決這個問題的傳統方法是采用梯度下降法,但是該算法需要在迭代的過程中調整所有參數。而在ELM算法中,隨機確定輸入權重wi和隱層的偏置bi后,通過確定一個無限可微的激活函數,隱層的輸出矩陣就被唯一確定。就這樣對單隱層神經網絡的求解就等同于求解線性系統Hβ=T,并且輸出權重β可以被唯一確定。

其中,H+是矩陣H的Moore-Penrose廣義逆。且可證明求得的解的范數是最小的并且唯一。
3 ELM算法的實現和仿真
3.1 ELM算法的實現
根據上述分析,ELM學習算法主要是以下幾個步驟:
(1)訓練數據的處理和導入。
(2)根據不同隱含層神經元數量對訓練精度和測試精度的影響,確定更好的隱含層神經元的數量L,并且隨機確定輸入層的權重wi和隱含層神經元的偏置bi。
(3)反復使用不同的無限可微的函數確定一個較好的隱含層神經元的激活函數g(x)。
計算隱含層輸出矩陣H。
計算輸出層權重βi。
3.2 仿真驗證
本試驗選取用于高速動車組牽引系統的IPMSM。電機參數如下:極對數Pn=6,定子電阻Rs=0.262 Ω,直軸電感Ld=0.00521 H,交軸電感Lq=0.00951 H,永磁體磁鏈ψf=1.6 Wb,轉子的轉動慣量J=0.85 kg*m2,阻尼系數F=0.0013 N*m*s,變流器中間直流電壓Udc=3500 V,額定轉矩TL=1364 N*m,設定轉速1200 r/min,假設電機負載轉矩為外界的擾動。先搭建高速動車組永磁直驅電機矢量控制模型,調整參數之后取得ELM的訓練數據,再經如圖3所示的數據處理及訓練過程,得到ELM的學習模型。

圖3 數據處理及訓練流程圖Fig.3 Data processing & training flow diagram
本試驗采用10000個數據組成的ELM的訓練數據集和2500個數據組成的測試數據集,并以sigmoid函數為激活函數,訓練過程及結果如下:
(1)進行多次訓練,根據隱含層神經元的數目與訓練精度和測試精度的關系,然后可以確定一個優質的隱含層神經元的數量。仿真結果如圖4所示。

圖4 訓練誤差與隱含層神經元數量的關系Fig.4 The relationship between training error & the number of hidden neurons

圖5 測試誤差與隱含層神經元數量的關系Fig.5 The relationship between testing error & the number of hidden neurons
(2)根據第一步的仿真結果,選取250個隱含層神經元,采用2500個測試數據,求得SLFNs與測試數據中輸出值的絕對誤差,及網絡預測輸出的轉子位置的當前值和測試集輸出間的跟隨關系。以下圖中E表示ELM與測試數據輸出值的平均誤差,R表示SLFNs的輸入數據與輸出數據的相關性,根據網絡的輸入數據確定當前時刻轉子位置的仿真結果如下:
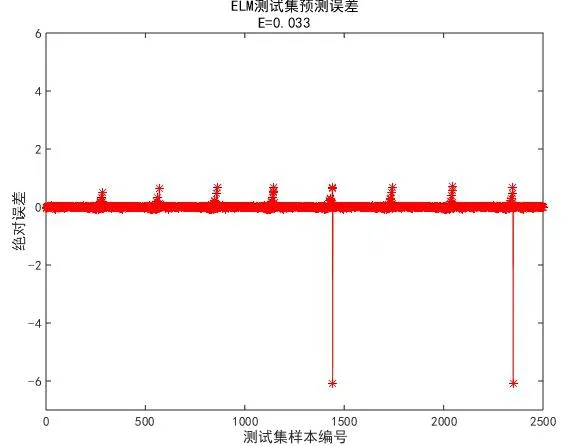
圖6 2500個樣本的測試集的絕對誤差Fig.6 Absolute error of the testing gather for 2500 samples
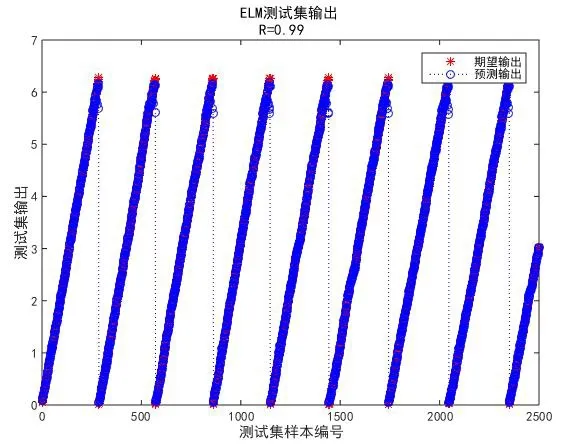
圖7 2500個樣本的測試集的期望輸出與預測輸出Fig.7 Expected & predicted output of the testing gather for 2500 samples
(3)又選取250組測試數據進行測試,根據網絡的輸入所確定的當前時刻轉子位置的仿真結果如圖8、9所示。

圖8 250個樣本的當前時刻轉子位置測試集的絕對誤差Fig.8 Absolute error of the testing gather for 250 samples in the sample time

圖9 250個樣本的當前時刻轉子位置測試集的期望輸出與預測輸出Fig.9 Expected & predicted output of the testing gather for 250 samples
(4)選取250個樣本測試的根據ELM的輸出所確定下一時刻網絡輸出與實際輸出的關系,如圖10、11所示。

圖10 250個樣本的下一時刻時刻轉子位置測試集的絕對誤差Fig.10 Absolute error of the testing gather for 250 samples in next sample time

圖11 250個樣本的下一時刻時刻轉子位置測試集的期望輸出與預測輸出Fig.11 Expected & predicted output of the testing gather for 250 samples in next sample time
4 結果分析以及展望
以上試驗結果說明,將ELM引入永磁直驅電機的轉子位置估計與預測系統中,在給定訓練數據和測試數據后,經過學習,ELM能夠對永磁牽引電機的轉子進行檢測和進一步的預測并且能夠跟隨轉子位置的變化而達到足夠的精度,預測值也相當精確,它還具有相當快的學習能力,動態性能良好,響應速度足以實現對轉子位置進行檢測和預測的要求,也可以使用ELM取代物理的位置傳感器。本試驗中將電機的電磁轉矩也作為網絡的輸出,試驗結果表明,ELM同樣具有對電機轉矩觀測的能力。但是,由于ELM算法下的SLFNs的輸入權重wi和隱含層神經元的偏置bi是隨機確定的,確定的網絡參數可能達不到最優的參數,并且在反復試驗時,這種隨機確定的參數造成了神經網絡參數不一致,導致試驗結果略有差異,但是在選擇相同輸入參數前提下,相同的隱含層神經元數目時誤差不大。總體來看,試驗結果達到預期效果。
根據高速動車組永磁牽引系統的工作特征,下一步將對永磁直驅電機采取直接轉矩空間矢量(DTC-SVPWM)控制,利用ELM實現對永磁牽引電機的轉子位置、磁鏈和轉矩同時進行觀測和預測,實現永磁牽引電機的期望電壓矢量直接轉矩預測控制,進一步降低牽引電機的轉矩脈動,以追求更好的控制性能。