行車碰撞事件原因分析及預防措施
2018-02-22 03:16:24易周斌
電力安全技術 2018年12期
關鍵詞:功能
易周斌,陳 林
(1.大亞灣核電運營管理有限責任公司,廣東 深圳 518124;2.蘇州熱工研究院有限公司,江蘇 蘇州 215004)
0 引言
由于起重機械工作特點及存在的危險因素,我國每年起重傷害事故的因工死亡人數占全部工業企業因工死亡總人數約15 %。行車作為較為常見的起重機械設備類型,廣泛應用于各類工礦企業的大件吊裝工作。作為起重機械重要安全設施之一的限位系統,常因設計不當、司機操作失誤等原因引發安全事故。
以某電站的行車起重作業時,因司機操作失誤、減速限位程序缺失導致行車發生碰撞事件為例,對行車限位系統設計的合理性以及防人因功能進行分析,為起重作業的安全提供借鑒。
1 事件經過
某電站汽輪機正在進行大修,行車司機操作汽輪機廠房內北側的行車吊運工具,以4檔速度向南行駛時,與停在南側的行車發生碰撞。碰撞前,行駛中的北側行車并未有明顯減速,造成北側行車水平尺變形嚴重(見圖1);南側行車減速限位開關、停車限位開關均被撞壞,失去自動復位功能,限位開關失效(見圖2);南、北側行車4個緩沖器均被撞壞(見圖3)。
2 行車防碰撞的設計原理
在行車設計時,考慮到實際應用中可能出現碰撞事件,采取了以下3級防碰撞保護措施。

圖1 行車水平尺變形
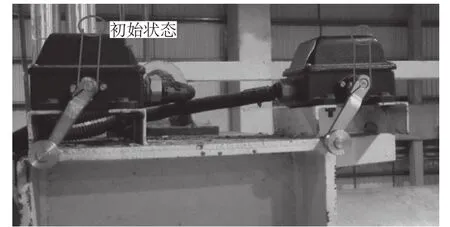
圖2 減速限位開關及停車限位開關被撞壞

圖3 緩沖器被撞壞
2.1 第1級——紅外感應信號
當2臺行車運行到達設定距離時(車距約6 m),司機駕駛室發出報警提示:司機操作室左手邊操作臺的1個紅色提示燈會閃爍紅光(見圖4),并發出蜂鳴報警;同時,在行車司機正上方操作面板大車運行機構“防撞報警”信號燈會變紅,提示司機行車有碰撞風險,需減速運行并觀察行車位置。

圖4 紅外線感應信號燈
2.2 第2級——減速限位
當2臺行車突破第1級報警提示后,行車繼續靠近,此時位于2臺行車西側各有1個電氣減速限位開關,當減速限位開關碰到另一臺行車的水平尺(10號槽鋼)時動作。無論觸發前行車運行速度處于何種檔位,行車均會變為1檔慢速運行。
2.3 第3級——停止限位
當行車突破第2級保護后,行車繼續靠近,當停止限位開關碰觸到另一臺行車的水平尺時動作(停止限位開關距減速限位開關約400 mm),行車停止運行。
3 行車碰撞原因分析
3.1 設備原因
3.1.1 行車未設置減速限位功能
涉事行車未按設計原理設置減速限位功能,因為沒有強制性標準規定必須設置減速限位功能。
GB 6067.1—2010《起重機械安全規程》對運行行程限位器作出如下要求:起重機和起重小車(懸掛型電動葫蘆運行小車除外),應在每個運行方向裝設運行行程限位器,在達到設計規定的極限位置時,自動切斷行車前進方向的動力源。在運行速度大于100 m/min或停車定位要求較嚴的情況下,宜根據需要裝設2級運行行程限位器,第1級發出減速信號并按規定要求減速,第2級應能自動斷電并停車。
GB 14405—2011《通用橋式起重機》對運行機構作出如下要求:起重機和小車的運行機構應設行程開關、止擋、掃軌板和緩沖器;同一軌道上有2臺起重機或小車時,相互間應設防碰撞裝置。如需嚴格控制相互間距離時,宜設定距裝置。
涉事行車的最高運行速度為0.5 m/s,已設置停止限位功能,滿足起重機安全防護要求;同時,該車還配置防撞安全防護功能:
(1) 聲光報警信號有效,聲音和燈光報警信號可提醒司機車距過近;
(2) 停止限位有效,行車在運行極限位置時,可自動切斷動力源;
(3) 緩沖器有效,可減輕因行車速度過快或停止限位失效時產生的碰撞后果,滿足GB 14405—2011中在需嚴格控制相互間距離時宜設定距裝置的要求。
因此,該涉事行車的安全防護措施是合格的。
3.1.2 減速功能無法完全避免行車相撞
3.1.2.1 行車基本參數
(1) 4 檔速度:0.5 m/s;3 檔速度:0.35 m/s;2 檔速度:0.125 m/s;1 檔速度:0.05 m/s。
(2) 減速時間:5 s(從4檔速度降至0)。(3) 減速限位開關到停止限位開關距離:400 mm。(4) 停止限位動作時,2車緩沖器之間的距離:200 mm。
(5) 聲光報警紅外發生器調節范圍:3—5 m(極端情況為3 m)。
行車限位裝置參數如圖5所示。
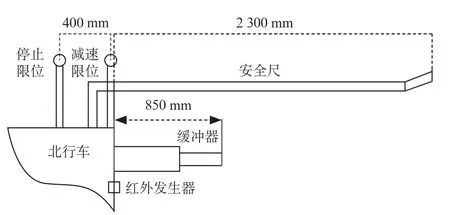
圖5 行車限位裝置參數示意
3.1.2.2 行車制動過程計算
(1) 制動距離計算。

注:vt——最終速度,m/s;v0——初始速度,m/s;a——行車加速度,m/s2;t——加速時間,s;S——制動距離,m。
(2) 加速運動計算。

(3) 行車碰撞速度計算。根據監控記錄,在碰撞當日 14:29:14—14:29:20,北行車向南移動3 m,按勻速計算,可知碰撞速度vo為0.5 m/s,即4檔速度。
(4) 行車加速度。由行車基本參數可知,行車減速時間t為5 s,行車由4擋速度降為0,由公式(3)計算可知,行車加速度a=-0.1 m/s2。此外咨詢廠家技術人員得知,行車出廠時加速度為固定參數(可調節),故可得知此涉事行車減速限位和停止限位加速度大小是一致的。
(5) 碰撞后的行車制動距離計算。
① 4檔速度:減速時間t為5 s,由公式(1)計算得知,S=0.5×5-0.5×0.1×52=1.25 m>200 mm。
② 3檔速度:減速時間t為3.5 s,則S=0.35×3.5-0.5×0.1×3.52≈ 0.61 m>200 mm。
③ 2 檔速度:同理,S=0.125×1.25-0.5×0.1×1.252≈0.08 m<200 mm。
④ 1 檔速度:同理,S=0.05×0.5-0.5×0.1×0.52≈0.01 m<200 mm。
(6) 以4檔速度觸發聲光報警后的制動距離。此時,v0=0.5 m/s,vt=0.05 m/s,a=-0.1 m/s2, 由公式(2)可知,聲光報警啟動后,2行車緩沖器之間的距離,如圖6所示。
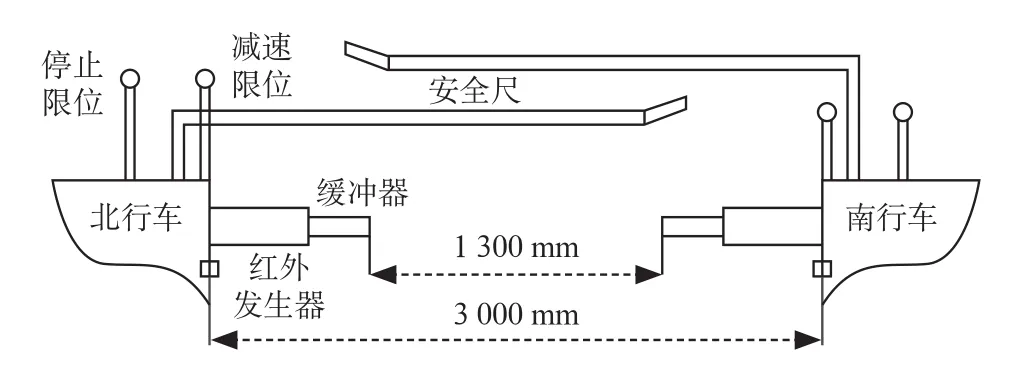
圖6 聲光報警后的行車距離
(7) 減速限位動作后的制動距離。
① 4檔速度時,行車減速限位開關到停止限位開關距離,S=400 mm,vo=0.5 m/s,a=-0.1 m/s2,由公式(2)計算可知,行車停止限位動作時的速度vt≈0.41 m/s。
② 行車停止限位動作后,由公式(2)可得,制動距離S=(0-0.412)/2×(-0.1)≈0.85 m>200 mm。
經過上述計算可得到以下結論:
(1) 北行車以4檔速度與南行車相撞;
(2) 在聲光報警后,司機操作行車減速至1檔或2檔速度,可以避免相撞;
(3) 涉事行車即便設置減速限位功能,也無法避免相撞。
3.1.3 慣性思維干擾
由于同類電站行車在制造時未設置減速限位功能,且同類電站未出過任何碰撞問題,受慣性共模對比思維影響,未考慮該電站會出現行車碰撞事件。涉事行車在改造中未考慮減速功能,且GB 6067.1—2010對此無強制要求;同類電站D的汽輪機廠房主行車在原設計中沒有減速限位功能。3.1.4 驗收時未實際驗收減速效果
使用部門在驗收時,未發現減速限位功能缺失。驗證時,當行車靠近停止檔時,按規范要求使用慢檔運行,同時司機室顯示屏上“減速動作”信號燈變紅,就認定減速限位功能正常、控制面板的信號燈信號與原邏輯一樣,但實際上,行車運行速度并未減慢,這對驗收減速功能造成了誤導。
3.2 人員行為
3.2.1 司機違規操作
行車司機違規操作,具體如下:行車司機沒有按照橋式起重機安全操作規程的要求,即“當行車接近卷揚限位器、大小車臨近終端或與鄰近行車相遇時,速度要緩慢”進行操作;也沒有按照該電站汽輪機廠房行車操作培訓材料的要求,即“當運行機構行至止檔塊4 m左右距離時使用慢速,防止速度過快沖限位進行操作。”
3.2.2 司機未參加相關操作培訓
每次發電機組大修前,汽輪機廠房行車司機必須接受現場操作專項培訓。但此次事件中的當事司機臨時代替原司機操作行車,并未參加大修前的上車培訓。
3.3 管理因素
行車操作多方監管,存在“真空”區。在電站管理方面,行車司機由監督部門、業務部門、協調部門三方管理,但又是各管一部分,缺失對中間環節的管理。
根據國家法律,持有《特種設備作業人員證》的司機方可駕駛行車并從事起重作業,電站要求必須持有培訓合格才能上崗。但監督部門只負責審查證件的合法性與有效性,業務部門只負責培訓行車司機了解設備的特性及工作狀態。由于行車司機屬于臨時抽調,就會造成行車司機持證卻沒有參加電廠培訓的情況。
3.4 原因總結
3.4.1 直接原因
行車司機違規操作。行車吊運時以4檔速度向南行駛,在靠近南行車的情況下未減速,造成行車在觸碰停車限位后無法立即停車,導致在慣性作用下發生行車相撞事件,違反國家和電站操作規定。
3.4.2 根本原因
電站在行車司機管理方面存在不足,對行車司機的三方監管導致監管存在“真空區”。
3.4.3 促成因素
(1) 涉事行車僅設計了停車限位而未設置減速功能,雖滿足國標要求,但從本質安全角度考慮,該設計無法確保行車安全。
(2) 根據行車制動距離計算結果,涉事行車即便設置了減速限位功能,仍然無法避免行車碰撞。這說明廠家在設計制造行車時,并未考慮極限情況。
4 行車碰撞風險的控制措施
根據ERICPD風險控制措施原則,結合行車碰撞風險分析結果,總結了行車碰撞風險的主要控制措施,如表1所示。
5 總結
作為較為常見的大型起重設備,行車具有起重量大、效率高等作業特點,同時也存在較大的作業安全風險,稍有不慎,就可能造成群死群傷的重、特大安全生產事故。針對一起電站行車碰撞事件,研究了同一軌道上行車相撞的失效模式,指出碰撞的根本原因,為行車起重安全工作提供了管理思路和技術措施。值得指出的是,通過調查、分析,發現了2類共性問題:
(1) 部分國家強制標準要求偏低,甚至無法保障最基本的安全需求,需要重新審視,提高基準;
(2) 部分起重設備在安全功能設計上,沒有從極限工況及從本質安全的角度考慮,僅僅依賴人為操作來保障作業安全是不可靠的。
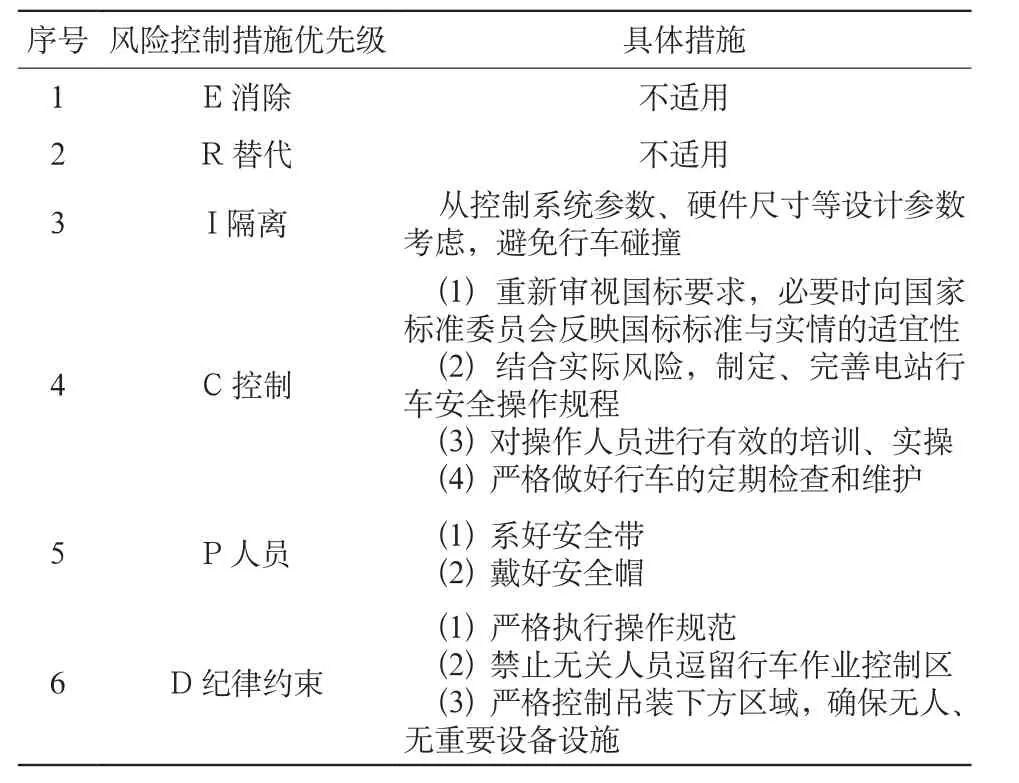
表1 行車碰撞風險的主要控制措施
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55