基于單片機和電動推桿的舞龍機器人
2018-02-26 07:53:50翁柏濤林舒靜潘秋玉劉曉雯鄭譽煌
電子技術與軟件工程 2018年15期
關鍵詞:單片機
翁柏濤 林舒靜 潘秋玉 劉曉雯 鄭譽煌

摘要
本文提出了以單片機為控制核心,以多臺電動推桿作為動力源的舞龍機械裝置。通過單片機控制推桿的轉速變化,同時搭載XY滑臺的機械結構,實現舞龍的動作效果。
【關鍵詞】舞龍 電動推桿 單片機
1 引言
舞龍作為喜慶節日必不可少民俗文化活動,動作繚亂,格外吸引人們的眼光。但同時舞龍表演需要眾多表演者不停地跑動表演,龍頭龍身的笨重,無形也造成了大量人力資源的浪費。于此,本文提出了以單片機為控制核心,電動推桿為舞龍動力的多軸機器人,通過單片機對推桿的控制,最終能實現舞龍的動作控制。
2 方案論證
方案一:使用三個電動平坐推桿分別作為舞龍機器人x,y,z三個軸的運動動力,采用“層層推進”的結構,即是每個推桿下安裝一塊板,每個板上的底端安裝萬向滾輪形成一個“層”,之后由另外一個推桿所在的“層”進行推動上一“層”的結構,最后將舞龍的支撐柱裝于推桿上。但由于z軸采用的也是垂直上推,總體效果看來舞龍動作變化較小,缺乏靈動的感覺。
方案二:在方案一的基礎上進行新的改進,將z軸的推桿換成相同規格不同頭部的推桿,將撐起舞龍的支撐住中部挖出一條槽,將推桿通過螺絲插入槽中,在推桿推動的時候,螺絲在槽中移動,從而帶隊支撐住的擺動。此方案下的舞龍動作更加形象,擺動幅度合適,更有靈活性和觀賞性。同時考慮在系統的穩定性,最后將X軸的推桿由一個增加為兩個,來保證推動前一“層”的時候不會劇烈晃動。綜上分析,本文采用方案二。
3 系統設計
3.1 硬件組成
(1)單片機:本系統以開關量控制為主,每節龍需要4個開關量輸出控制電動推桿,因此本系統采用STC89C52單片機,最高可以控制4節龍。
(2)電動推桿:本系統主要采用了3個平底推桿和1個非平底推桿,電動推桿主要技術參數時:工作電壓24V,行程50mm,推力150N,速度60mm/s。
(3)電動推桿控制器:本控制器自帶兩個繼電器,可通過單片機控制,從而控制電動推桿的正反轉,同時還帶有PWM直流電機調速器,可調節推桿的運轉速度。本控制器輸入電壓為6~24V,最大電流為3A,調速范圍0~100%。
(4)每節的龍身:包括龍身以及其支撐柱。
(5)其他材料:包括24V穩壓電源、角鐵、環氧板、萬向滾輪等。
3.2 電路圖設計
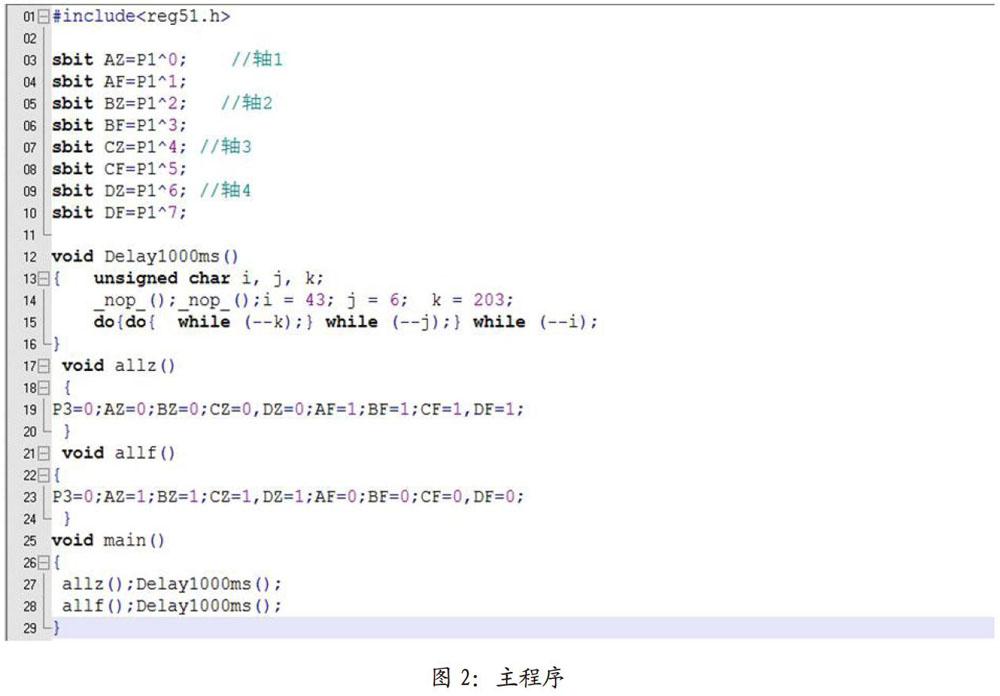
本系統的電路圖(一節龍)如圖1所示,主程序如圖2所示。
將開關電源通電,將開關電源的24V和com口分別接入到第一塊電動推桿控制器IN+,IN-。因開關電源的電流足夠支撐四臺推桿同時運行,所以將每一塊推桿的IN+和IN-各自串聯起來。依次將每個推桿接入到控制器,將單片機的P1口分別按上圖接入到電動推桿控制器,將P3.0和P3.1接入到第一塊驅動器的兩個GND,其他驅動器的GND不需要添加任何輸入。
程序中定義P3.0、P3.1為低電平。定義P1口,用第一塊電動推桿控制器舉例,當P1.0為高電平時,P1.1為低電平IN2所在繼電器啟動,此時定義推桿正轉。當P1.1為高電平時,P1.0為低電平,此時IN2所在繼電器啟動,此時推桿反轉。其他推桿運動相同。
3.3 實物組裝
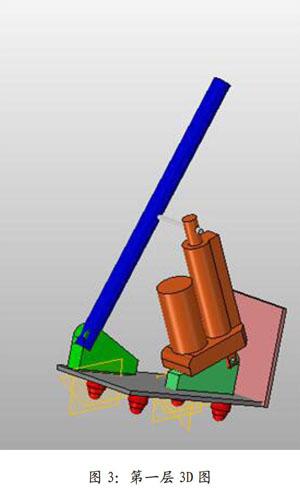
(1)第一層:切出兩塊大小合適的板子,一塊大板(大約20cm*10cm),一塊小板(大約10cm*5cm)。在大板上面畫出兩個推桿固定的架子、4個萬向滾輪、以及兩個角鐵的位置,之后進行打孔,然后用螺絲將推桿固定的架子、萬向滾輪固定在大板上。將推桿(非平底)固定在推桿架子上,再將龍珠的支撐柱底部固定在另外一個推桿架子上,支撐柱中部挖出一條螺絲能自由滑動的槽,并與推桿的頭部用螺絲進行連接。小板用角鐵固定在大板的寬上,在其中間打一個孔,用于通過螺絲與第二層的推桿頭部連接,如圖3所示。
(2)第二層:切出四塊大小合適的板。大板(大約30cm*15cm),兩塊小板(大約10cm*5cm),一塊小板(大約12cm*7cm)。大板選取合適的位置,在底部裝上4個萬向滾輪。然后將兩塊小板通過角鐵裝在大板的長的對稱的位置,小板中間鉆孔,用于與第三層的兩個推桿連接。最后將另一塊小板通過角鐵裝在大板的寬上,將推桿裝到板上,推桿的頭部與第一層的小板用螺絲加兩個螺母進行連接如圖4所示。
(3)第三層:切出三塊大小合適的板:大板(大約30cm*30cm),小板(10cm*5cm)。將小板對應著第二層兩塊小板的位置,用角鐵固定在大板上面。將兩個平底推桿固定在兩塊小板上,并將推桿的頭部與第二層的兩塊對稱的小板連接,如圖5所示。圖6是完整一節舞龍機器人的機械結構。
4 小結
本文提出的舞龍機器人體型較小,運行穩定且速度可控。理論上可以通過無限加“層”來實現自己需要的舞龍動作。同時本文描述的僅是舞龍機器人的其中一“節”,可通過多“節”的組合變化,最終實現舞龍機器人動作的多樣化。未來的工作,可考慮在將“層”與“節”合理增加的同時,再與當今熱門的AGV小車結合起來,實現舞龍機器人移動與搖擺自如的多樣化舞龍系統。
參考文獻
[1]葉莖,蓋超會,李云平.基于觸摸屏、PLC、變頻器的電機調速和推桿控制系統的設計與實現[J].輕工科技,2016,32(11):67-69.
[2]江城城,王志勇,王夏杰.基于推桿電機的全向移動多功能又車的設計[J].機械研究與應用,2016,29(01):163-165.
[3]黃海燕.自動推拉門窗用推桿電機性能測試裝置[J].門窗,2014(10):17-18
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
