沉管隧道帶壟溝碎石墊層清淤施工方法研究
2018-02-27 22:28:00馮海暴
隧道建設(中英文) 2018年1期
馮海暴, 尹 剛
0 引言
沉管隧道施工工法首次應用于1910年美國鐵路鋼殼底特律河隧道工程。目前國內外已經建成的沉管隧道約150座。對于先鋪法沉管隧道施工技術,基礎多采用帶壟溝碎石墊層,尤其對于外海深水先鋪法沉管隧道施工,受水下回淤環境的影響,回淤成為了先鋪法沉管隧道施工的一項技術難題。
根據國內外清淤技術的調研研究可知,基礎清淤多采用接觸式和氣壓控制的方法,例如: 耙吸船工藝[1],通過離心式泥泵利用負壓將挖泥耙頭撓松的泥土吸入泥艙內,滿艙后起耙,航行至船窩吹填區,該方法主要用于挖泥和基坑的浮泥清除,一般會對帶壟溝的碎石墊層產生擾動,否則將無法實現清淤的目的; 覆蓋防淤方法[2-4]是通過土工布或鋼質蓋板對容易回淤的區域進行覆蓋,阻止回淤物落入碎石墊層區,該方法施工效率低且在起吊覆蓋收納時容易造成碎石墊層破壞; 基礎底部埋設管道的清淤方法[5]是在碎石墊層鋪設前預埋帶孔眼的清淤管道,當碎石墊層鋪設完成后,利用清淤泵提供動力,通過預埋管道將碎石墊層頂部的回淤物進行水體置換,該方法對碎石墊層幾乎不產生擾動,但施工操作繁瑣且效率低,對于不需要清除回淤的區域仍然需要埋置管道,無法做到靈活清淤; 清除氣舉法清淤[6]多用于鉆孔灌注樁樁孔底部的泥漿清除,是一種典型的接觸式清淤方法,在氣壓的動力下無法徹底清除泥漿,因此無法對碎石墊層面進行清淤;“蓋章式”間歇清淤法[7]也是一種接觸式清淤方法,將吸頭壓在碎石墊層頂部,然后開啟吸頭的清淤泵對碎石墊層進行清淤,該方法不僅對基床產生擾動,而且施工速度極慢。通過對上述文獻中的清淤方法進行分析和研究可知,這些方法存在擾動基床、操作繁瑣、基床清淤不干凈或施工效率低等問題,給工程施工帶來了諸多不便。對于港珠澳大橋沉管隧道先鋪法碎石基礎工程,在強回淤的環境條件下,為保證帶壟溝的碎石墊層基礎順利施工,達到快速清淤的目的,急需研制一套新型的清淤設備。通過對國內外清淤方法的研究和分析可知,有效利用清淤動力泵提高動力,利用平臺支撐將吸頭固定至距離基床設定距離進行行走式連續清淤,可以在保證不擾動碎石基床的情況下實現碎石墊層的快速清淤。研發固定式清淤平臺并攜帶清淤吸頭在固定范圍內連續清淤的方法和設備,可以有效清除帶壟溝碎石墊層的回淤物,有效保障沉管碎石墊層的施工和清淤作業。
1 研究目的
本文研究的課題,是為了研制高精度清淤設備,將其用于清除帶壟溝碎石墊層面的超標回淤物、自然回淤或拋石夯平基礎縫隙中殘留的淤泥被擠出后形成的淤泥堆積以及其他引起基床回淤超過基床帶壟溝碎石墊層允許回淤標準的情況,并采用預控措施預防平臺失穩。
2 清淤技術
2.1 清淤設備組成
在外海深水風、浪、流的作用下,采用帶樁腿的平臺式母船作為清淤系統的框架載體,在母船平臺上設置清淤框架,采用框架平臺剛性導向裝置連接清淤吸頭,利用框架上的行走小車與大車帶動清淤吸頭,實現單個船位范圍內的連續清淤。該設備可以有效控制吸頭與帶壟溝碎石墊層面的距離,實現在不擾動碎石墊層的情況下精確清淤。
整個清淤設備由吸泥管、空壓機、高壓水泵、沖淤頭、沖泥進氣管和吸泥進氣管組成,運泥采用泥駁。在整平船下料管上固定吸泥管,吸泥管的下部固定沖淤頭,沖淤頭可以通過調節高水壓力將壟頂部分的泥漿全部沖刷到壟溝中。為防止碎石堵塞泥泵,采用空壓機對吸泥管下部進行打壓,使吸泥管下部形成負壓,將壟溝內的泥漿抽出,達到清淤的目的。在吸泥作業的同時,通過高壓水泵對沖泥管進行打壓,達到清除基床壟頂泥漿的目的(沖泥管水平線性沖刷壟頂部分回淤)。清淤設備示意圖如圖1所示。
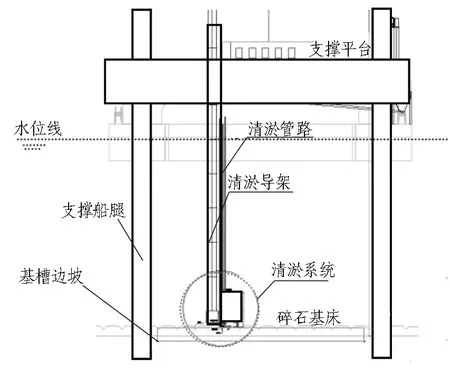
(a) 整體示意圖
(b) 清淤系統細部示意圖
在基床鋪設前,首先通過清淤專用設備對邊坡和基槽進行整體清淤; 在碎石鋪設完成后,對于自然回淤或拋石夯平基礎縫隙中殘留淤泥被擠出形成的淤泥堆積以及其他引起基床回淤超過基床回淤標準的情況,通過清淤專用設備進行清淤。
在沉管安裝前,帶壟溝碎石墊層面出現回淤時,采用清淤設備清除水深10~48 m的回淤物,每個船位作業范圍(長×寬)可達48 m×25 m。設備主要由大車、小車、清淤系統桁架、升降裝置、清淤泥泵、清淤管系、配套軟管、絞車及清淤控制系統和測量系統等組成。
2.2 工作原理
該設備具有清淤和沖淤的雙重功能。清淤的原理是利用空壓機供應壓縮空氣,壓縮空氣通過進氣管進入吸泥管,與吸泥管中的水混合成氣水混合物(相對密度小于1),使吸泥管的吸頭處形成水頭差,在水頭差和壓縮空氣氣流的作用下,淤泥順吸泥管排出。吸泥管底部安裝孔徑為1.5 cm的孔篦,防止石子被吸走。沖淤的原理是利用高壓水泵對壟頂淤泥進行壓力沖刷,沖刷時噴頭為線性水流,可以使淤泥稠度變小,在水壓的推力下淤泥移動進入壟溝,實現壟頂的清淤。
2.3 碎石墊層面清淤流場
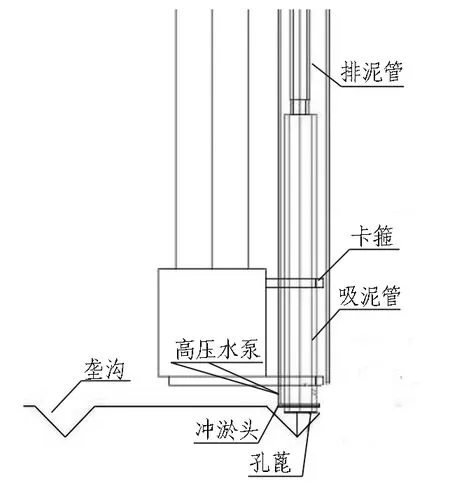
通過氣流產生的動力將泥水混合物置換出碎石墊層區,但不得擾動已鋪設的碎石墊層,并需要控制好碎石墊層面清淤吸頭處的流速和形成的流場,但采用氣流形成的流場不穩定。結合試驗研究和分析計算得出,采用同樣的結構,利用清淤泵吸除碎石墊層面的泥水混合物更穩定可靠,可通過泥泵滿足動力系統的要求,但吸頭的位置、流速和型式決定了可清淤的有效范圍,因此,清淤吸頭型式是影響清淤效果主要的因素。結合現場碎石墊層的尺寸和條件,根據數值模擬計算和物理模型試驗結果,對多種清淤吸頭進行了優化,最終確定吸頭型式為T型[8]。清淤吸頭工作原理和型式示意圖如圖2所示。
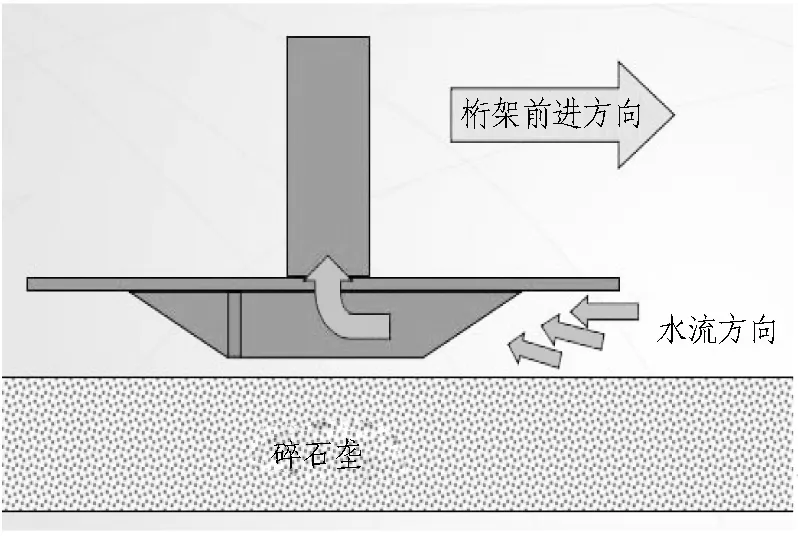
(a) 工作原理
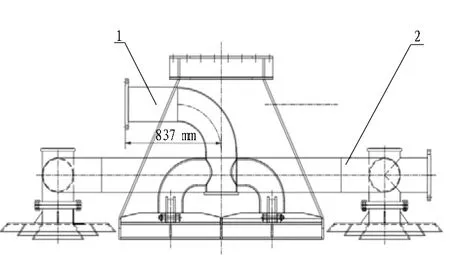
(b) 吸頭型式
1—主吸口; 2—側吸口。
圖2清淤吸頭工作原理和型式示意圖
Fig. 2 Working principle and sketch of dredging sucker
2.4 清淤試驗研究
通過清淤系統對基床面沉積的淤泥進行擾動,然后在清淤泵的水動力作用下將淤泥漿吸走,實現基床表面的清淤。
根據水動力原理可知,清淤系統吸頭距離淤積泥面越近,清淤吸口處的流速越大,對沉積于碎石基床面的淤泥清除效果越明顯,但吸頭距離基床面太近、吸口流速太大時,鋪設好的基床碎石在水動力作用下將會受到擾動或被吸走。因此,需要確定吸頭在清淤時與碎石基床面的臨界距離和流速等關鍵參數,得出相應的關系,確保在達到最優工效的同時不擾動碎石基床。目前關鍵參數的確定尚無相應的參考資料,因此需要通過試驗確定。
2.4.1 沉管基床面碎石顆粒的起動臨界流速試驗
該試驗主要用來確定在不擾動已鋪碎石的情況下已鋪設基床面碎石顆粒的起動流速。根據不同的邊界條件水動力形成的流場非常復雜,關于清淤系統吸頭在碎石基床面產生的水流速度分布情況,通過對現有多種計算方法進行對比,發現這些方法的計算結果偏差較大。因此,根據施工條件開展了物理模型試驗,得出了碎石顆粒的起動速度。
針對島隧工程的實際工況條件,開展了平坡碎石墊層抗沖刷性能試驗、1∶20和1∶30斜坡碎石墊層抗沖刷性能試驗、碎石墊層V型槽上沿抗沖刷性能試驗。以竇國仁學者的起動概率標準[9-10]進行統計,即推移質運動分為以下3種狀態: 1)個別起動:相應的起動概率為1.35%~2.27%; 2)少量起動:相應的起動概率為2.27%~15.9%; 3)大量起動:相應的起動概率>15.9%。
通過試驗得出,基床碎石清淤時基床面碎石的最大流速不大于流速的限定值。
2.4.2 沉管基床碎石清淤吸頭與基床面距離的確定
在清淤過程中,清淤吸頭與基床面的距離以及清淤吸頭處的流速值在基床面產生的流速值,與吸頭處流體的密度有一定的關系,因此需要通過試驗進行確定,得出最終的結果。
2.4.3 清淤高精度自動測控系統研究
清淤系統測控數據的精度主要取決于高程控制系統,結合GPS對清淤裝置的高程及水平位置進行定位,并對該系統的施工數據進行采集和集中控制,實現數據的相互交換和共享。根據GPS數據對清淤裝置的高程及水平位置進行調整,利用清淤裝置頭部油缸精確、自動調整吸口位置高度,保證清淤效果并確保不破壞碎石墊層。在系統配設前開展系統的高程精度控制測試,清淤系統底部配備強光照明的水下攝像頭和多波束掃描成像聲吶裝置,其可隨清淤裝置的吸頭同步移動,可實時獲取水下碎石基床的清淤狀況,同時將數據反饋給系統集控室,便于對清淤效果進行評估和判斷。清淤檢測系統示意圖如圖3所示。
對于系統的清淤效果需要通過聲吶系統連續掃測對比校正后進行系統地判定,并需要通過系統測試試驗驗證聲吶的可靠性等參數。
2.5 關鍵技術參數
結合試驗及相關研究確定了清淤設備的關鍵技術參數和方式: 1)以平臺式整平船作為清淤系統的載體母船; 2)采取“行走式”的連續清淤方式; 3)采用的清淤泵為大型泥泵; 4)在清淤過程中通過高壓沖水的方式擾動沉積的淤泥; 5)清淤系統桁架長度為66 m,最大船舶作業水深50 m,清淤作業水深10~50 m,每個船位清淤范圍(長×寬)為48 m×25 m,清除淤泥密度≤1.3 kg/m3。

圖3 清淤檢測系統示意圖Fig. 3 Sketch of detection system for dredging
3 清淤工藝及應用效果
3.1 清淤工藝
帶壟溝碎石墊層清淤施工流程如圖4所示。
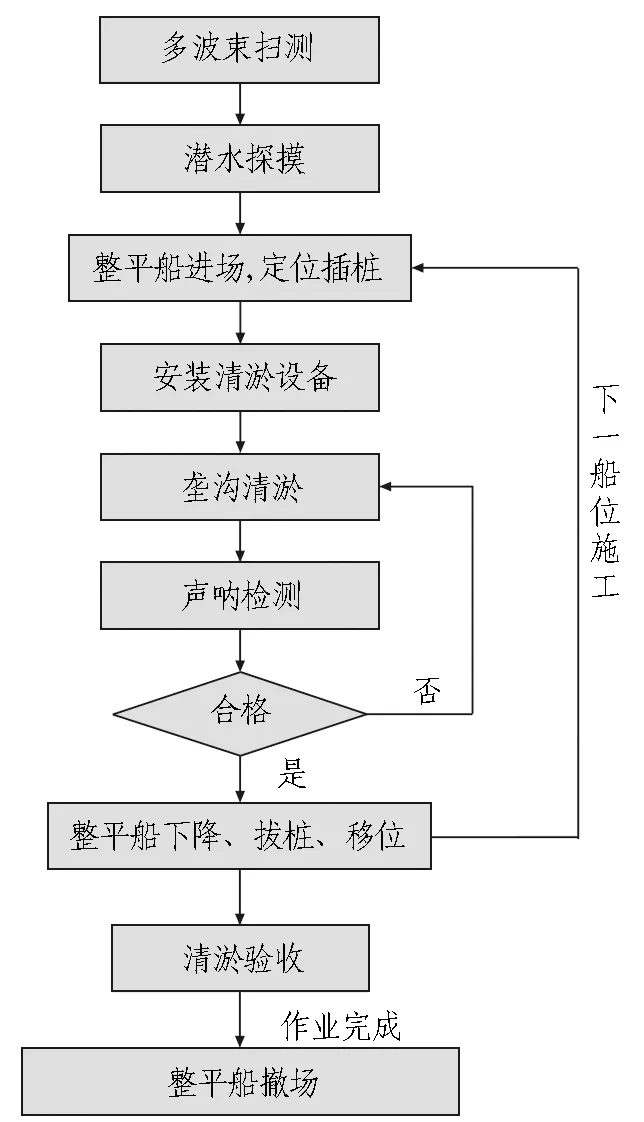
圖4 帶壟溝碎石墊層清淤施工流程圖Fig. 4 Flowchart of dredging construction
碎石墊層鋪設完成后,采用多波束進行掃測,如發現異常高點,則派遣潛水員進行水下定點探摸。探摸確認為異物的,將異物清理出碎石墊層區域; 探摸確認為淤泥的,則探摸出淤泥范圍及淤泥厚度,并根據決策進行清淤。
需要清淤時,整平船進場駐位,進行插樁抬升清淤平臺。插樁完成后,采用管定位系統將吸泥管定位至需清淤的壟溝碎石墊層上方,采用壓力探頭檢測方式[11-12]將清淤吸頭下降至泥面,循環清淤至吸泥管底部低于壟頂標高時停止。
啟動水泵同時對吸泥管和沖泥管供水,開始清除壟溝淤泥和沖刷壟頂淤泥。控制拋石管以規定的速度進行往復清淤,直至排泥管中排出清水為止。利用聲納掃測壟頂和壟溝淤泥清除情況,采用碎石墊層驗收方式進行復測,合格后方可撤離清淤設備。
3.2 應用效果
為了驗證清淤設備的清淤效果,清淤系統安裝完成后,選擇在西人工島側進行碎石墊層基床清淤試驗。試驗前通過測控系統側掃聲吶,并與人工探摸相結合[13-14],精確測得試驗碎石壟處的回淤厚度,選取試驗碎石基床的第1壟、第3壟和原泥面進行清淤系統試驗。根據回淤后的高程在系統內設定清淤吸頭的初始高度,然后在試驗過程中對泥泵功效進行調節,檢驗試驗效果。
試驗后經潛水員潛水探摸對比可知,吸頭距離壟面高度滿足操控室高度設定值的要求,碎石壟面的沉積淤泥完全被清除干凈。根據本次試驗結果,調節吸頭至距離碎石壟面規定的高度后,泥泵運轉負荷達到了額定功率,清淤效果良好。采用單泵清淤時,泥泵最好設定為全功率運行,以提高出口處的排水壓力; 采用雙泵清淤時,泥泵功率可以適當降低,以保持泥泵的運轉轉速,保證清淤效果和出水壓力。
從潛水探摸、多波束掃測的情況看,壟頂面回淤物基本被清除干凈,可見碎石,壟頂高程合格率約為95%。
4 結論及展望
根據國內外清淤技術及方法,通過研究提出了采用清淤平臺實現深水條件下帶壟溝碎石墊層的高精度清淤。通過物理模型試驗、數值模擬計算等方法,在國內外清淤技術的基礎上,研制了沉管隧道帶壟溝碎石墊層清淤設備,可以有效降低先鋪法沉管隧道碎石墊層施工回淤風險。另外,通過試驗驗證了清淤設備具有帶壟溝碎石墊層清淤和沖刷淤泥的雙重功能,作業最大水深50 m,每個船位清淤范圍(長×寬)可達48 m×25 m。
帶壟溝碎石墊層清淤設備的成功研制,拓寬了先鋪法沉管隧道的施工應用范圍,降低了大型構件在回淤環境條件下的施工影響,其可以推廣應用于疏浚工程、清淤工程等,具有廣泛的應用前景,可為類似工程提供借鑒。
該技術的成功研發,雖然可以實現碎石基床面的高精度定點定量清淤施工,但是由于該設備采用支撐式平臺,施工過程中仍會受到水深的影響,因此具有一定的局限性。建議研究者依托本文繼續深入研究清淤設備和技術,在未來的研究中,可以重點考慮不受水深影響的高精度清淤設備與技術,突破水深的限制,為遠海超大水深工程建設時的清淤施工項目進行技術指導。
[1] 張琦, 朱淋淋. 港珠澳大橋島隧工程沉管隧道基槽開挖及清淤施工的質量控制[J]. 中國港灣建設, 2016, 36(7): 97.
ZHANG Qi, ZHU Linlin. Quality control for excavation and desilting of foundation trench for immersed tunnel project of Hongkong-Zhuhao-Macao Bridge[J]. China Harbour Engineering, 2016, 36 (7): 97.
[2] 劉德進, 陸連洲, 曲俐俐, 等. 沉管隧道碎石基床覆蓋式防淤蓋板、防淤系統及施工方法: CN104878779A[P]. 2015-05-28[2017-01-25].
LIU Dejin, LU Lianzhou, QU Lili, et al. Ded cover type anti-silting, anti-silting system and construction method for immersed tunnel:CN104878779A[P]. 2015-05-28[2017-01-25].
[3] 曲俐俐, 馮海暴. 沉管隧道基床剛性框架式土工布覆蓋防淤系統及方法:CN104878792A[P]. 2015-09-02[2017-01-25].
QU Lili, FENG Haibao. Anti-silting system and method for rigid frame type geotextile of immersed tunnel:CN104878792A[P]. 2015-09-02[2017-01-25].
[4] 曲俐俐, 馮海暴. 沉管隧道基床膠囊起浮式土工布覆蓋防淤系統及方法: CN104878793A[P]. 2015-09-02[2017-01-25].
QU Lili, FENG Haibao. Anti-silting system and method for rigid frame type geotextile of immersed tunnel: CN104878793A[P]. 2015-09-02[2017-01-25].
[5] 劉德進, 馮海暴, 蘇長璽, 等. 沉管隧道碎石基床清淤系統: CN205348226U[P]. 2016-01-28[2017-01-25].
LIU Dejin, FENG Haibao, SU Changxi, et al. Dredging system for gravel foundation of immersed tunnel: CN205348226U[P]. 2016-01-28[2017-01-25].
[6] 李永升, 王欣. 樁基工程護筒氣舉清理法[J]. 港工技術, 2016, 53(3): 67.
LI Yongsheng, WANG Xin. Air-lift method for casing interior cleaning during pile construction[J]. Port Engineering Technology, 2016, 53(3): 67.
[7] 韋杏靜, 趙寧, 向宏. 深海基槽清淤專用吸頭[J]. 中國港灣建設, 2016, 36(1): 68.
WEI Xingjing , ZHAO Ning, XIANG Hong. Special suction head for dredging of deep sea foundation trench[J]. China Harbour Construction, 2016, 36(1): 68.
[8] 尹剛, 孟博, 魏杰. 碎石基床清淤系統設備研究與應用[J]. 船舶工程, 2016(增刊1): 117.
YIN Gang, MENG Bo, WEI Jie. Research and application of dredging system for crushed stone foundation[J]. Ship Engineering, 2016(S1): 117.
[9] 曹湘波, 鄭捷, 向宏, 等. 清淤吸頭: CN104863193A[P]. 2015-08-26[2017-01-25].
CAO Xiangbo, ZHENG Jie, XIANG Hong, et al. Dredging sucker: CN104863193A[P]. 2015-08-26[2017-01-25].
[10] 張學俊, 楊瑞亮, 蘇長璽, 等. 沉管隧道基床整平過程中定時清淤防淤系統及方法: CN104878780A[P]. 2015-05-28[2017-01-25].
ZHANG Xuejun, YANG Ruiliang, SU Changxi, et al. Time dredging system and methods for immersed tunnel foundation during leveling process: CN104878780A[P]. 2015-05-28[2017-01-25].
[11] 溫以華, 杜代軍. 一種船載新型射流式擾沙清淤裝備: CN201620432U[P]. 2010-11-03[2017-01-25].
WEN Yihua, DU Daijun. A new type of ship jet dredging equipment: CN201620432U[P]. 2010-11-03[2017-01-25].
[12] 徐平, 王秀軍, 劉曜寧. 清淤船液壓系統設計[J]. 機床與液壓, 2016, 44(22): 108.
XU Ping, WANG Xiujun, LIU Yaoning. Design of desilting ship hydraulic system[J]. Machine Tool and Hydraulics, 2016, 44 (22): 108.
[13] 王楠. 射流清淤船關鍵技術研究[D]. 上海: 上海交通大學, 2013.
WANG Nan. Research on key technologies for jet dredger[D]. Shanghai: Shanghai Jiaotong University, 2013.
[14] 王愛玲, 王戰勝, 丁長領, 等. 自行式組合清淤船的研制與應用[J]. 人民黃河, 2008, 30(6): 24.
WANG Ailing, WANG Zhansheng, DING Changling, et al. Development and application of self-propelled combination dredger[J]. Yellow River, 2008, 30(6): 24.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國房地產業(2016年2期)2016-03-01 01:25:48
