基于RF和ANFIS算法的直驅(qū)風(fēng)電機(jī)組故障預(yù)警
2018-03-03 03:50:41柳亦兵
噪聲與振動(dòng)控制 2018年1期
丁 顯,徐 進(jìn),滕 偉,柳亦兵
(1.華北電力大學(xué) 電站設(shè)備狀態(tài)監(jiān)測(cè)與控制教育部重點(diǎn)實(shí)驗(yàn)室,北京 102206;2.魯能新能源(集團(tuán))有限公司,北京 100020)
風(fēng)電機(jī)組長(zhǎng)期處于復(fù)雜工況下運(yùn)行,機(jī)組的葉片、齒輪箱或發(fā)電機(jī)等大部件嚴(yán)重事故頻發(fā),給風(fēng)電場(chǎng)安全生產(chǎn)帶來(lái)了較大隱患。風(fēng)電機(jī)組長(zhǎng)時(shí)間傳統(tǒng)的計(jì)劃性檢修維護(hù),必然導(dǎo)致機(jī)組欠維護(hù)和過(guò)維護(hù),機(jī)組早期微弱故障特征往往被強(qiáng)大的背景噪聲掩蓋,在日常巡檢和定期維護(hù)所發(fā)現(xiàn)的故障往往都是無(wú)法掩飾的嚴(yán)重故障,不僅會(huì)給故障部件帶來(lái)不可修復(fù)的損傷,還會(huì)導(dǎo)致風(fēng)電機(jī)組二次損傷。因此十分有必要對(duì)風(fēng)電機(jī)組大部件進(jìn)行故障預(yù)測(cè)預(yù)警,實(shí)時(shí)掌握故障的發(fā)生發(fā)展演化趨勢(shì),開(kāi)展風(fēng)電機(jī)組預(yù)防性維護(hù)維修。
國(guó)內(nèi)外學(xué)者對(duì)于風(fēng)電機(jī)組大部件健康狀態(tài)監(jiān)測(cè)與故障診斷做了大量研究。振動(dòng)監(jiān)測(cè)數(shù)據(jù)對(duì)于診斷風(fēng)電機(jī)組齒輪箱和軸承故障具有較好的效果,Zhipeng Feng提出了應(yīng)用經(jīng)驗(yàn)?zāi)J椒纸猓‥MD)和能量分離的方法來(lái)提取風(fēng)電機(jī)組行星輪微弱故障特征[1]。I.Antoniadou用經(jīng)驗(yàn)?zāi)J椒纸馓崛★L(fēng)電機(jī)組振動(dòng)信號(hào)中蘊(yùn)含的各頻率成分,用希爾伯特作為解調(diào)方法和Teager-Kaiser能量算子進(jìn)行對(duì)比分析[2]。Aijun Hu應(yīng)用全局固有時(shí)間尺度分解(EITD)和小波包變換(WPT)-關(guān)聯(lián)維數(shù)相結(jié)合的方法識(shí)別風(fēng)電機(jī)組高速軸的故障類(lèi)型和故障狀態(tài)[3]。W.Y.Liu提出了基于Morlet小波變換和Wigner-Ville分布的風(fēng)電機(jī)組齒輪箱故障特征提取方法,用連續(xù)小波變換(CWT)濾除原始振動(dòng)信號(hào)的噪聲成分,該方法能夠使每個(gè)瞬時(shí)頻率保持較高的能量和分辨率,具有良好的能量聚集性和抑制交叉噪聲[4]。丁雪娟提出應(yīng)用階次窄帶包絡(luò)分析方法來(lái)診斷直驅(qū)風(fēng)電機(jī)組的軸承故障,克服了變轉(zhuǎn)速影響和低頻調(diào)制微弱信號(hào)難以提取的問(wèn)題[5]。李東東應(yīng)用自適應(yīng)EEMD算法將振動(dòng)信號(hào)分解為一系列本征模態(tài)函數(shù),通過(guò)分形維數(shù)來(lái)識(shí)別不同類(lèi)型振動(dòng)信號(hào),達(dá)到診斷風(fēng)電齒輪箱行星輪的目的[6]。孟玲霞提出了一種基于Gabor重排對(duì)數(shù)時(shí)頻脊流形早期故障預(yù)警方法,提升了風(fēng)機(jī)齒輪箱早期診斷的精準(zhǔn)程度[7]。但文獻(xiàn)[1]至文獻(xiàn)[7]均不能夠預(yù)測(cè)預(yù)警風(fēng)電機(jī)組故障。Andrew Kusiak將風(fēng)電機(jī)組故障依據(jù)嚴(yán)重程度劃分為三類(lèi),并提出了通過(guò)功率曲線(xiàn)、故障代碼等形式來(lái)判斷機(jī)組健康狀態(tài)[8]。Jürgen Herp提出了一種基于貝葉斯方法的風(fēng)電機(jī)組軸承故障預(yù)測(cè)方法,該方法應(yīng)用軸承溫度殘差服從高斯正態(tài)分布特性來(lái)實(shí)現(xiàn)[9]。趙洪山應(yīng)用最小二乘支持向量機(jī)(LSSVM)和統(tǒng)計(jì)過(guò)程控制(SPC)來(lái)分析溫度殘差,預(yù)測(cè)齒輪箱故障狀態(tài)[10]。大量故障案例表明,通過(guò)單一指標(biāo)預(yù)警機(jī)組故障效果并不明顯。童超提出了采用ReliefF特征選擇與BP神經(jīng)網(wǎng)絡(luò)相結(jié)合的方法判斷風(fēng)電機(jī)組槳距角不對(duì)稱(chēng)故障,并不能夠?qū)嘟堑牟粚?duì)稱(chēng)程度進(jìn)行監(jiān)測(cè)監(jiān)控[11]。董玉亮提出局部保持投影(LPP)和自組織映射的故障預(yù)警方法,通過(guò)最小量化誤差作為健康狀態(tài)指標(biāo)來(lái)預(yù)測(cè)齒輪箱故障[12]。董玉亮建立了基于高斯混合模型(GMM)的健康狀態(tài)評(píng)價(jià)模型,應(yīng)用健康衰退指數(shù)作為評(píng)價(jià)標(biāo)準(zhǔn),來(lái)預(yù)測(cè)評(píng)價(jià)風(fēng)電齒輪箱故障狀態(tài)[13]。但文獻(xiàn)[12]和[13]只分析了故障前4天的數(shù)據(jù),不能監(jiān)控故障的發(fā)生演化趨勢(shì)。李輝應(yīng)用層次分析法給出了反映風(fēng)電機(jī)組運(yùn)行狀態(tài)的指標(biāo)層,應(yīng)用劣化度指標(biāo),建立模糊綜合評(píng)判模型來(lái)評(píng)價(jià)風(fēng)電機(jī)組健康狀態(tài)[14]。肖運(yùn)啟給出了影響風(fēng)電機(jī)組運(yùn)行狀態(tài)的參數(shù),采用層次分析法建立各層關(guān)聯(lián)因素,以劣化度為指標(biāo),應(yīng)用模糊隸屬度加權(quán)進(jìn)行逐層評(píng)價(jià)[15]。但文獻(xiàn)[14]和[15]在選取風(fēng)電機(jī)組影響風(fēng)電機(jī)組運(yùn)行狀態(tài)的參數(shù)時(shí)沒(méi)有詳細(xì)計(jì)算各參數(shù)與目標(biāo)值之間的相關(guān)性和相關(guān)度,會(huì)給后續(xù)的狀態(tài)評(píng)價(jià)帶來(lái)不確定性。曾承志提出了隱馬爾可夫模型(HMM)和優(yōu)勝劣汰遺傳算法相結(jié)合,來(lái)預(yù)測(cè)風(fēng)電機(jī)組齒輪箱故障的方法,該方法只能以預(yù)先定義的報(bào)警級(jí)別來(lái)判斷齒輪箱故障狀態(tài),不能監(jiān)測(cè)監(jiān)控并預(yù)警齒輪箱故障演化過(guò)程[16]。
根據(jù)文獻(xiàn)綜述,提出應(yīng)用隨機(jī)森林算法(RF)和自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)算法(ANFIS)相結(jié)合對(duì)直驅(qū)風(fēng)電機(jī)組發(fā)電機(jī)故障進(jìn)行預(yù)測(cè)預(yù)警的方法。利用隨機(jī)森林算法計(jì)算各參數(shù)與目標(biāo)的相關(guān)性及相關(guān)度,解決各參數(shù)間的高維非線(xiàn)性問(wèn)題;依據(jù)各參數(shù)的重要程度構(gòu)建自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò),同時(shí)引入報(bào)警閾值的概念,實(shí)時(shí)監(jiān)控發(fā)電機(jī)故障演化趨勢(shì),提高故障預(yù)測(cè)預(yù)警的精準(zhǔn)度。
1 風(fēng)電機(jī)組故障預(yù)警流程
1.1 直驅(qū)風(fēng)電機(jī)組概述
以1.5 MW直驅(qū)機(jī)組為研究對(duì)象,其主要技術(shù)參數(shù)如表1所示。
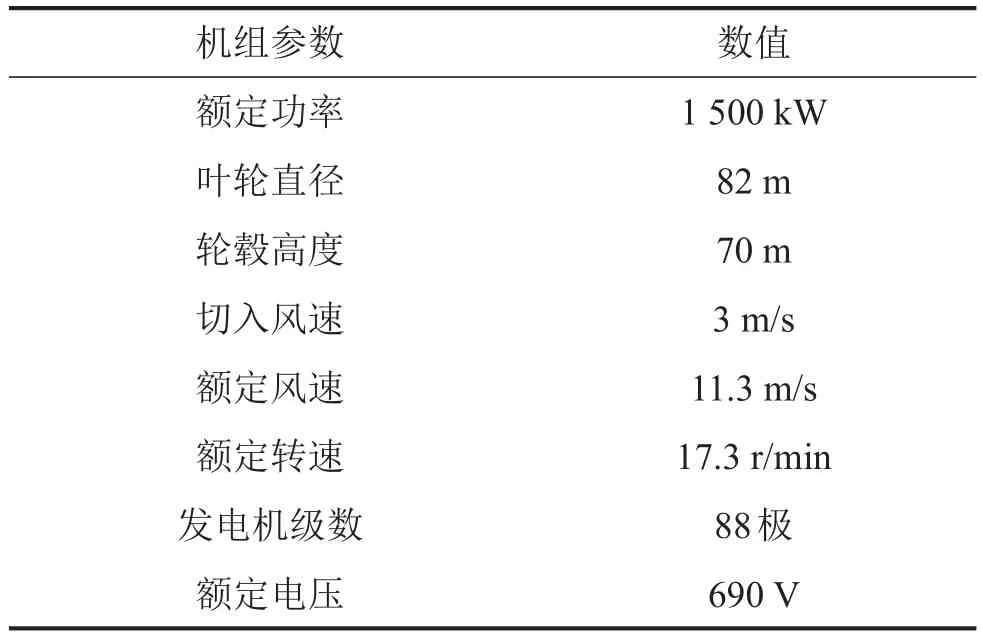
表1 風(fēng)電機(jī)組主要技術(shù)參數(shù)
風(fēng)電機(jī)組塔筒采用柔性錐形鋼結(jié)構(gòu),機(jī)艙通過(guò)偏航軸承安裝在塔筒上。葉輪將捕獲的風(fēng)能轉(zhuǎn)變?yōu)樾D(zhuǎn)的機(jī)械能,輪轂將葉片固定在一起,承受葉片傳遞的各種載荷,并傳遞到發(fā)電機(jī)上,發(fā)電機(jī)將旋轉(zhuǎn)的機(jī)械能轉(zhuǎn)換為電能。
該類(lèi)型機(jī)組監(jiān)控系統(tǒng)記錄了風(fēng)速、葉輪轉(zhuǎn)速、有功功率等共計(jì)62個(gè)運(yùn)行參數(shù)。
1.2 直驅(qū)風(fēng)電機(jī)組發(fā)電機(jī)結(jié)構(gòu)
該類(lèi)型1.5 MW直驅(qū)風(fēng)電機(jī)組發(fā)電機(jī)采用外轉(zhuǎn)子方式運(yùn)行。發(fā)電機(jī)由定子、轉(zhuǎn)子、動(dòng)定軸和附件構(gòu)成;發(fā)電機(jī)定子由定子支架、鐵芯和繞組及其他附件組成,轉(zhuǎn)子由轉(zhuǎn)子支架和永磁磁極組成。發(fā)電機(jī)為六相輸出,定子采用分?jǐn)?shù)槽,能更好的消除發(fā)電機(jī)諧波影響。
1.3 故障預(yù)警流程
圖1為提出的風(fēng)電機(jī)組故障預(yù)警流程。
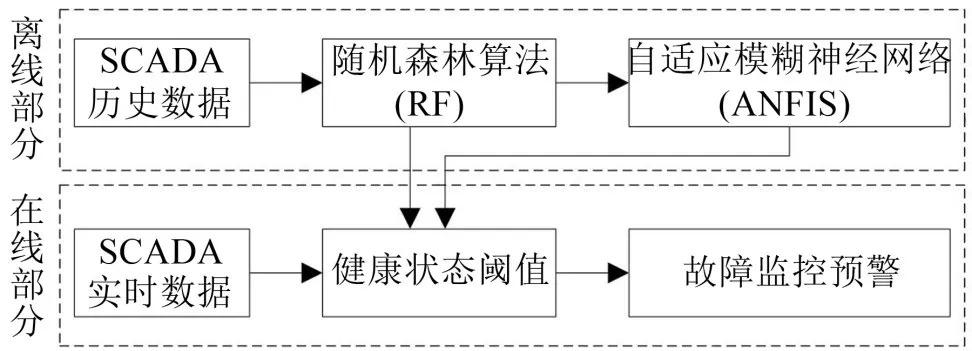
圖1 風(fēng)電機(jī)組故障預(yù)警流程
離線(xiàn)部分:首先對(duì)風(fēng)電機(jī)組SCADA歷史數(shù)據(jù)進(jìn)行清洗,然后應(yīng)用隨機(jī)森林算法計(jì)算各運(yùn)行參數(shù)的相關(guān)度,最后利用提取的運(yùn)行參數(shù)構(gòu)建自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)模型,利用風(fēng)電機(jī)組健康時(shí)的運(yùn)行參數(shù)進(jìn)行訓(xùn)練,獲得預(yù)警閾值。在線(xiàn)部分:對(duì)實(shí)時(shí)SCADA數(shù)據(jù)進(jìn)行數(shù)據(jù)清洗,利用離線(xiàn)部分提取的運(yùn)行參數(shù),計(jì)算當(dāng)前狀態(tài),使用基于ANFIS模型計(jì)算的預(yù)警閾值,實(shí)現(xiàn)風(fēng)電機(jī)組故障實(shí)時(shí)預(yù)警。
2 運(yùn)行數(shù)據(jù)清洗
2.1 特殊工況分析
風(fēng)電機(jī)組在實(shí)際運(yùn)行中,存在許多特殊工況,如表2所示。
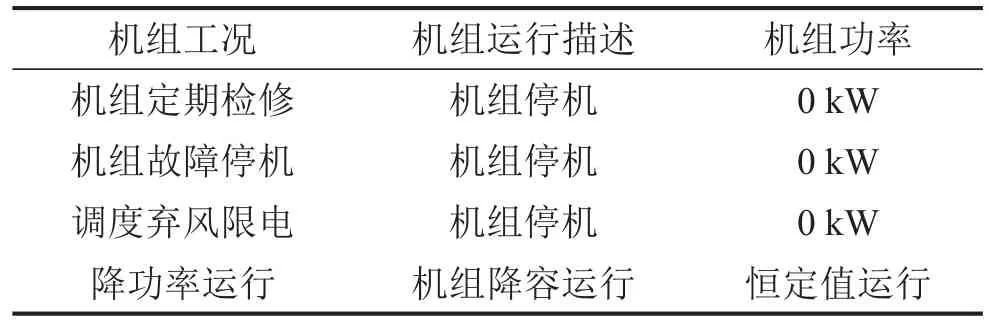
表2 風(fēng)電機(jī)組特殊工況
特殊工況運(yùn)行會(huì)導(dǎo)致機(jī)組實(shí)際功率與設(shè)計(jì)功率有較大偏差,此時(shí)機(jī)組健康狀態(tài)良好,但特殊工況不符合風(fēng)電機(jī)組故障預(yù)警對(duì)于數(shù)據(jù)的要求,異常功率點(diǎn)會(huì)影響健康狀態(tài)評(píng)估。
2.2 實(shí)際功率曲線(xiàn)標(biāo)準(zhǔn)化
理論功率曲線(xiàn)是機(jī)組在標(biāo)準(zhǔn)氣壓和空氣密度下能夠達(dá)到的功率曲線(xiàn)。具體到每臺(tái)機(jī)組每個(gè)時(shí)刻,與標(biāo)準(zhǔn)環(huán)境均存在差異,根據(jù)每臺(tái)機(jī)組所處的時(shí)間和空間,通過(guò)風(fēng)速區(qū)間法計(jì)算機(jī)組風(fēng)速對(duì)應(yīng)的真實(shí)出力范圍。
2.2.1 氣壓標(biāo)準(zhǔn)化
將氣壓折算到風(fēng)電機(jī)組輪轂高度處的氣壓值,10 min氣壓的折算值為
計(jì)算得到P10min的范圍值。式中Pm為氣壓實(shí)際測(cè)量值;Hh為機(jī)組輪轂高度;Hs為測(cè)風(fēng)塔氣壓傳感器高度。
2.2.2 空氣密度標(biāo)準(zhǔn)化
空氣密度與氣壓、溫度和濕度相關(guān),10 min空氣密度折算值為

式中T10min為10 min數(shù)據(jù)的平均氣溫;R0為空氣的氣體常數(shù);φ為相對(duì)濕度;Rw為水蒸氣氣體常數(shù);Pw為水蒸氣壓力。
2.3 實(shí)際功率曲線(xiàn)區(qū)間范圍
根據(jù)實(shí)際功率曲線(xiàn)標(biāo)準(zhǔn)化方法,計(jì)算當(dāng)氣壓最低和空氣密度最小時(shí)的功率曲線(xiàn)及氣壓最高和空氣密度最大時(shí)的功率曲線(xiàn),并繪制圖形。
3 特征參數(shù)提取
3.1 隨機(jī)森林算法
隨機(jī)森林算法(Random Forest,RF)是決策樹(shù)的組合,利用bootstrap重抽樣方法從原始樣本中抽取多個(gè)樣本,然后對(duì)每個(gè)bootstrap樣本進(jìn)行決策樹(shù)建模,然后組合成多棵決策樹(shù)進(jìn)行預(yù)測(cè),并通過(guò)投票得出最終預(yù)測(cè)結(jié)果。其分類(lèi)原理和流程如下所示。
① 每棵決策樹(shù)由樣本量為K的訓(xùn)練樣本X和隨機(jī)向量θk生成。
② 隨機(jī)向量序列{θk,k=1,2,...K}獨(dú)立同分布。
③ 所有決策樹(shù)的集合{h(X,θk),k=1,2,...K}。
④ 每個(gè)決策樹(shù)模型h(X,θk)都有投票權(quán)來(lái)選擇輸入變量x的分類(lèi)結(jié)果。

H(x)表示隨機(jī)森林分類(lèi)結(jié)果,hi(x)是單個(gè)決策樹(shù)分類(lèi)結(jié)果,Y表示分類(lèi)目標(biāo),I()為示性函數(shù)。
隨機(jī)森林算法計(jì)算流程如下圖2所示。
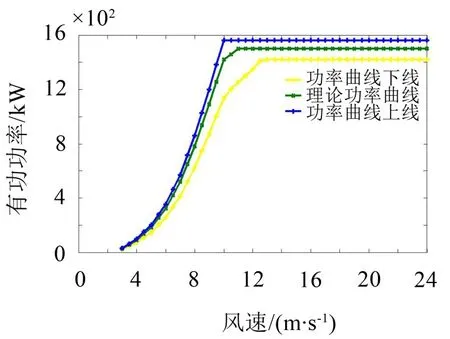
圖2 風(fēng)電機(jī)組實(shí)際功率曲線(xiàn)區(qū)間
3.2 相關(guān)度分析
風(fēng)電機(jī)組是典型的變速、變載荷能量轉(zhuǎn)換系統(tǒng),機(jī)組有功功率直接受風(fēng)速、葉輪轉(zhuǎn)速等運(yùn)行參數(shù)的影響。以有功功率為目標(biāo),應(yīng)用隨機(jī)森林算法建立相關(guān)度數(shù)據(jù)驅(qū)動(dòng)模型,分離并計(jì)算影響有功功率的關(guān)鍵參數(shù)及相關(guān)度,對(duì)應(yīng)的相關(guān)度如圖3所示。
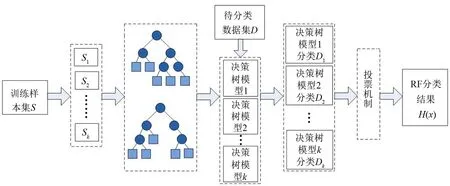
圖3 隨機(jī)森林算法流程
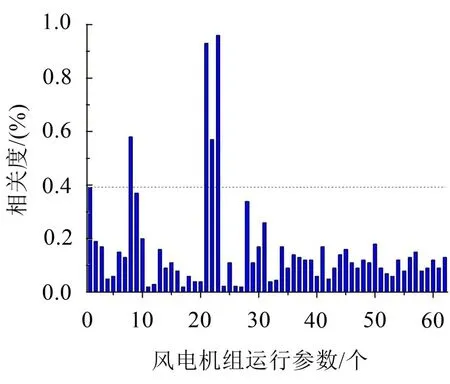
圖4 風(fēng)電機(jī)組運(yùn)行參數(shù)相關(guān)度
其中,風(fēng)電機(jī)組62個(gè)運(yùn)行參數(shù)中與有功功率相關(guān)度最緊密的參數(shù)為:電網(wǎng)側(cè)三相電流、風(fēng)速和發(fā)電機(jī)轉(zhuǎn)速,故選取這5個(gè)變量作為數(shù)據(jù)挖掘的自變量。
4 數(shù)據(jù)驅(qū)動(dòng)的故障預(yù)警模型
自適應(yīng)網(wǎng)絡(luò)模糊推理系統(tǒng)(ANFIS)是一種綜合了神經(jīng)網(wǎng)絡(luò)自適應(yīng)的模糊推理系統(tǒng),該算法具有學(xué)習(xí)機(jī)制和模糊系統(tǒng)的推理能力等優(yōu)點(diǎn)。根據(jù)數(shù)據(jù)清洗結(jié)果,構(gòu)建自適應(yīng)網(wǎng)絡(luò)模糊推理故障預(yù)警模型。
以?xún)蓚€(gè)輸入,每個(gè)輸入有兩個(gè)隸屬函數(shù),單個(gè)輸出為例來(lái)說(shuō)明算法的流程,實(shí)際應(yīng)用中輸入變量及每個(gè)變量的隸屬函數(shù)可以有更多個(gè),兩個(gè)輸入兩個(gè)隸屬函數(shù)的ANFIS模型計(jì)算流程如下:
第一層:該層輸出記為

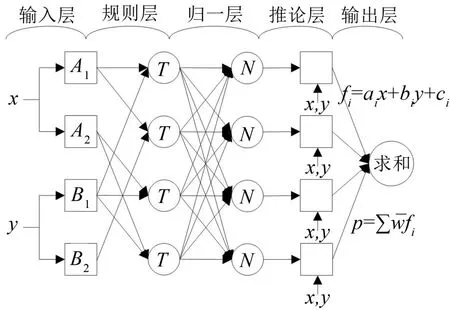
圖5 兩個(gè)輸入單輸出的1階推理ANFIS模型
其中N為輸入變量個(gè)數(shù),M為每個(gè)變量的隸屬函數(shù)個(gè)數(shù),μij(xi)為第i個(gè)輸入的第j個(gè)隸屬函數(shù)。模型中總共包含NM個(gè)隸屬函數(shù),加入隸屬函數(shù)為高斯型,則每個(gè)隸屬函數(shù)有2個(gè)參數(shù),總共需要優(yōu)化2NM個(gè)參數(shù),若隸屬函數(shù)為三角形或鐘形,則需要3NM個(gè)參數(shù),這部分參數(shù)稱(chēng)為前提參數(shù)。第一層的意義在于將精確的變量值轉(zhuǎn)換為隸屬不同模糊集的隸屬度,是模糊化操作。
第二層:對(duì)每個(gè)輸入變量的模糊輸出進(jìn)行組合,得到MN個(gè)模糊規(guī)則,采用代數(shù)積算子得到規(guī)則激勵(lì)強(qiáng)度。

第三層:對(duì)第二層的規(guī)則激勵(lì)強(qiáng)度歸一化處理。
第四層:根據(jù)Sugeno函數(shù)式推理方式計(jì)算每條推理結(jié)果。

由此可見(jiàn),單條推理有N+1個(gè)參數(shù),總共有MN條規(guī)則,參數(shù)總數(shù)為(N+1)×MN個(gè),與第一層前提參數(shù)對(duì)應(yīng),稱(chēng)為結(jié)論參數(shù)。
第五層:綜合第三層和第四層求和得到最后輸出。
ANFIS模型的參數(shù)優(yōu)化以最小化模型輸出與實(shí)際輸出之間的均方誤差為目標(biāo)。
5 案例分析
5.1 機(jī)組故障描述
某風(fēng)電場(chǎng)33臺(tái)直驅(qū)機(jī)組,運(yùn)行時(shí)間超過(guò)四年。某臺(tái)機(jī)組在正常運(yùn)行過(guò)程中監(jiān)控系統(tǒng)報(bào)發(fā)電機(jī)斷路器故障、變流器觸發(fā)故障。經(jīng)檢查未發(fā)現(xiàn)異常,啟動(dòng)機(jī)組后,再次報(bào)斷路器故障后,機(jī)組不能啟動(dòng),截取跳閘時(shí)運(yùn)行數(shù)據(jù)發(fā)現(xiàn),機(jī)側(cè)斷路器先于網(wǎng)側(cè)斷路器跳閘。
5.2 數(shù)據(jù)清洗及預(yù)分析
通過(guò)監(jiān)控系統(tǒng)調(diào)取該故障機(jī)組和正常機(jī)組四年運(yùn)行數(shù)據(jù),采用標(biāo)準(zhǔn)化功率曲線(xiàn)算法將偏離標(biāo)準(zhǔn)化功率曲線(xiàn)的數(shù)據(jù)點(diǎn)進(jìn)行剔除。圖6所示為故障機(jī)組在運(yùn)行第一年內(nèi)數(shù)據(jù)清洗后的功率曲線(xiàn)。
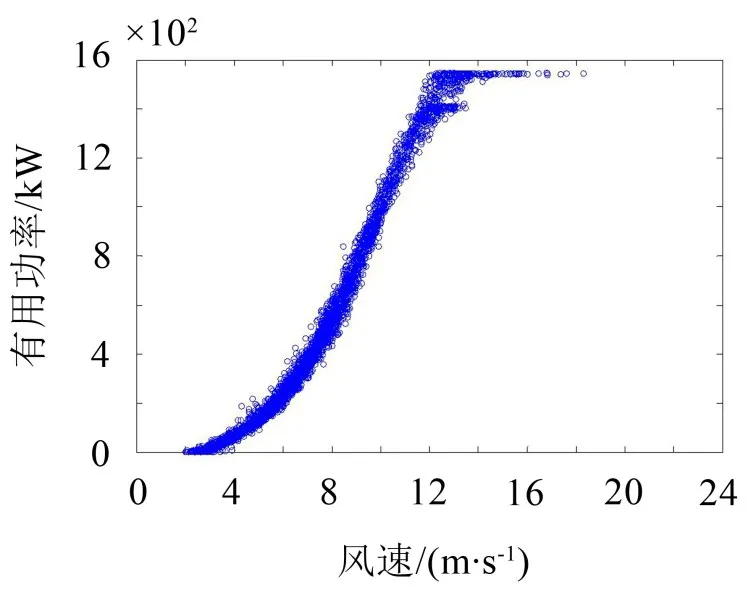
圖6 故障機(jī)組數(shù)據(jù)清洗后功率曲線(xiàn)
圖7列出了機(jī)組全壽命周期風(fēng)速(m/s)、有功功率(kW)、轉(zhuǎn)速(r/min)及網(wǎng)側(cè)三相電流(A)的運(yùn)行情況。5個(gè)運(yùn)行參數(shù)基本處于正常范圍內(nèi)。
在機(jī)組出現(xiàn)嚴(yán)重故障停機(jī)時(shí),功率、轉(zhuǎn)速及電流值均沒(méi)有明顯變化,難以通過(guò)運(yùn)行數(shù)據(jù)評(píng)估機(jī)組健康狀態(tài)。但在1 080天時(shí),機(jī)組出現(xiàn)電流反向過(guò)大,持續(xù)約1個(gè)小時(shí)。
5.3 發(fā)電機(jī)故障預(yù)警
以故障機(jī)組運(yùn)行第1年經(jīng)數(shù)據(jù)清洗后的運(yùn)行數(shù)據(jù)為基礎(chǔ),有功功率為目標(biāo)變量,風(fēng)速、轉(zhuǎn)速和網(wǎng)側(cè)三相電流為自變量,構(gòu)建ANFIS模型,接下來(lái)三年的運(yùn)行數(shù)據(jù)作為測(cè)試集,代入訓(xùn)練好的ANFIS模型。

圖7 機(jī)組全壽命周期運(yùn)行數(shù)據(jù)
機(jī)組運(yùn)行初期處于健康狀態(tài),由訓(xùn)練模型得到有功功率誤差應(yīng)服從正態(tài)分布,如果機(jī)組在后續(xù)運(yùn)行中出現(xiàn)故障或故障風(fēng)險(xiǎn),機(jī)組的測(cè)試數(shù)據(jù)在健康模型中的誤差結(jié)果必然偏離正態(tài)分布,偏離越嚴(yán)重,說(shuō)明機(jī)組健康狀態(tài)越惡劣。
圖8為故障機(jī)組在ANFIS模型下的訓(xùn)練誤差和測(cè)試誤差,黃色波動(dòng)線(xiàn)條表示訓(xùn)練誤差,藍(lán)色為測(cè)試誤差,以訓(xùn)練誤差的最大值作為機(jī)組健康狀態(tài)的報(bào)警閾值。
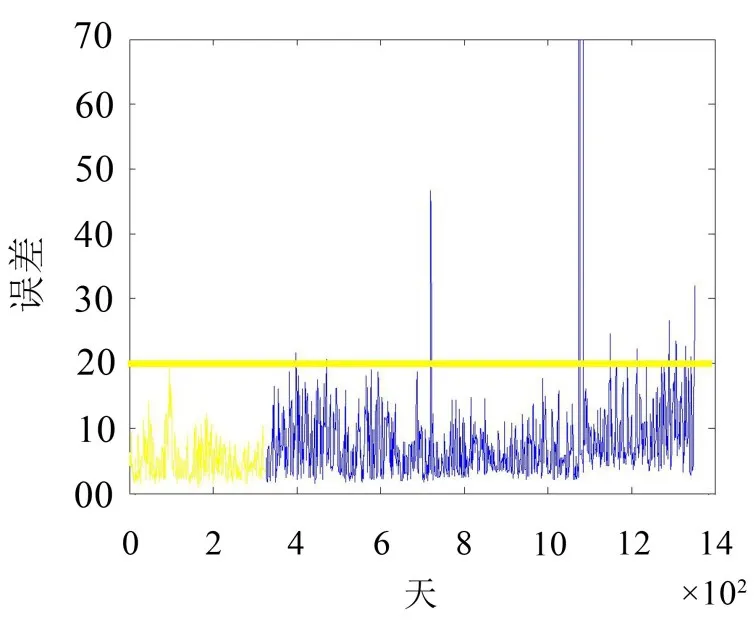
圖8 故障機(jī)組的ANFIS訓(xùn)練和測(cè)試誤差
有兩處(720天和1 080天)超過(guò)報(bào)警閾值,但持續(xù)時(shí)間較短,為運(yùn)行中的異常點(diǎn)。隨著時(shí)間的推移,從第1 100天開(kāi)始,測(cè)試誤差已經(jīng)越過(guò)報(bào)警閾值,且有連續(xù)逐漸增長(zhǎng)的趨勢(shì),說(shuō)明機(jī)組的故障狀態(tài)正在逐步惡化。
為說(shuō)明算法普遍性和適用性,對(duì)正常機(jī)組進(jìn)行故障預(yù)測(cè),結(jié)果如圖9。
正常機(jī)組在測(cè)試階段誤差沒(méi)有超過(guò)報(bào)警閾值,機(jī)組發(fā)電機(jī)運(yùn)行狀態(tài)良好。

圖9 正常機(jī)組的ANFIS訓(xùn)練和測(cè)試誤差
6 結(jié)語(yǔ)
應(yīng)用直驅(qū)風(fēng)電機(jī)組自投運(yùn)以來(lái)的運(yùn)行數(shù)據(jù),進(jìn)行深度數(shù)據(jù)挖掘,研究機(jī)組發(fā)電機(jī)健康狀態(tài)演化趨勢(shì)及故障預(yù)警,根據(jù)預(yù)警結(jié)果,合理安排備品備件儲(chǔ)備,調(diào)整檢修維護(hù)計(jì)劃,對(duì)于提高風(fēng)電機(jī)組安全穩(wěn)定運(yùn)行,降低突發(fā)性事故導(dǎo)致的二次傷害,節(jié)約運(yùn)維成本具有重要意義。
(1)充分考慮直驅(qū)風(fēng)電機(jī)組運(yùn)行工況復(fù)雜多變、各類(lèi)型狀態(tài)信息量繁雜的特點(diǎn),采用隨機(jī)森林算法對(duì)機(jī)組的62個(gè)運(yùn)行參數(shù)進(jìn)行相關(guān)度計(jì)算和降維處理,得到與機(jī)組發(fā)電機(jī)運(yùn)行相關(guān)度最密切的5個(gè)運(yùn)行參數(shù)。
(2)分析了機(jī)組運(yùn)行時(shí)的異常工況,并對(duì)實(shí)際功率進(jìn)行了標(biāo)準(zhǔn)化處理,用標(biāo)準(zhǔn)化功率曲線(xiàn)對(duì)運(yùn)行數(shù)據(jù)進(jìn)行清洗,得到無(wú)干擾歷史數(shù)據(jù)。
(3)基于某故障機(jī)組清洗后運(yùn)行數(shù)據(jù),構(gòu)建ANFIS模型,以機(jī)組運(yùn)行第一年的數(shù)據(jù)作為訓(xùn)練集,得到機(jī)組發(fā)電機(jī)故障預(yù)警閾值;以機(jī)組后續(xù)運(yùn)行數(shù)據(jù)作為測(cè)試集,構(gòu)建ANFIS模型對(duì)發(fā)電機(jī)進(jìn)行故障預(yù)警,得到機(jī)組在發(fā)生嚴(yán)重故障停機(jī)一年前,開(kāi)始帶故障隱患運(yùn)行,直至故障前期,測(cè)試誤差多次整體超過(guò)報(bào)警閾值,證明了算法的適用性和可靠性。
[1]ZHIPENG FENG,MING LIANG,YI ZHANG,et al.Fault diagnosis for wind turbine planetary gearboxes via demodulation analysis based on ensemble empirical mode decomposition and energy separation[J].Renewable Energy,47(2012):112-126.
[2]ANTONIADOU I,MANSON G,STASZEWSKI W J,et al.A time-frequency analysis approach for condition monitoring of a wind turbine gearbox under varying load conditions[J].MechanicalSystemsandSignal Processing,2015,64-65:188-216.
[3]AIJUN HU,XIAOAN YAN,LING XIANG,et al.A new wind turbine fault diagnosis method based on ensemble intrinsic time-scale decomposition and WPT-fractal dimension[J].Renewable Energy,83(2015):767-778.
[4]W Y LIU,Q W GAO,G YE,et al.Wind turbine fault diagnosis method based on diagonalspectrum and clustering binary tree SVM[J].Renewable Energy,2013 50:1-6.
[5]丁雪娟,王紅星.基于階次窄帶包絡(luò)分析的直驅(qū)風(fēng)機(jī)軸承[J].噪聲與振動(dòng)控制,2016,36(3):159-163.
[6]李東東,周文磊,鄭小霞,等.基于自適應(yīng)EEMD和分層分形維數(shù)的風(fēng)電機(jī)組行星齒輪箱故障檢測(cè)[J].電工技術(shù)學(xué)報(bào),2017,32(22):233-241.
[7]孟玲霞,徐小力,徐楊梅,等.變工況時(shí)頻脊流早期故障預(yù)警方法研究[J].北京理工大學(xué)學(xué)報(bào),2017,37(9):942-947.
[8]ANDREW KUSIAK,WENYAN LI,The prediction and diagnosis of wind turbine faults[J].Renewable Energy,2011,36:16-23.
[9]JüRGEN HERP,MOHAMMAD H RAMEZANI,MARTIN BACH-ANDERSEN,et al.Bayesian state prediction of wind turbine bearing failure[J].Renewable Energy,2017,12:1-9.
[10]趙洪山,胡慶春,李志為.基于統(tǒng)計(jì)過(guò)程控制的風(fēng)機(jī)齒輪箱故障預(yù)測(cè)[J].電力系統(tǒng)保護(hù)與控制,2012,40(13):67-73.
[11]童超,郭鵬.基于特征選擇和BP神經(jīng)網(wǎng)絡(luò)的風(fēng)電機(jī)組故障分類(lèi)監(jiān)測(cè)研究[J].動(dòng)力工程學(xué)報(bào),2014,34(4):313-317.
[12]董玉亮,顧煜炯.基于保局投影與自組織映射的風(fēng)電機(jī)組故障預(yù)警方法[J].太陽(yáng)能學(xué)報(bào),2015,36(5):1123-1129.
[13]董玉亮,李亞瓊,曹海斌,等.基于運(yùn)行工況辨識(shí)的風(fēng)電機(jī)組健康狀態(tài)實(shí)時(shí)評(píng)價(jià)方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2013,33(11):88-95.
[14]李輝,胡姚剛,唐顯虎,等.并網(wǎng)風(fēng)電機(jī)組在線(xiàn)運(yùn)行狀態(tài)評(píng)估方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2010,30(33):103-109.
[15]肖運(yùn)啟,王昆朋,賀貫舉,等.大型風(fēng)電機(jī)組運(yùn)行狀態(tài)模糊綜合評(píng)價(jià)[J].中國(guó)電機(jī)工程學(xué)報(bào),2014,34(13):2132-2139.
[16]曾承志,姚興佳,唐德堯,等.基于改進(jìn)型HMM的風(fēng)電機(jī)組齒輪箱故障預(yù)測(cè)[J].太陽(yáng)能學(xué)報(bào),2016,37(4):1017-102
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39