一種周期脈沖序列的搜索方法*
2018-03-21 00:56:09袁偉家
通信技術 2018年3期
袁偉家
(大連測控技術研究所,遼寧 大連 116013)
0 引 言
在主動聲納、雷達探測系統中,目標探測具有一定難度,主要原因在于目標回波的強度較小,除傳播信道的影響,信號采樣、調制、編碼等環節均引入了噪聲[1]。而依據發射信號窄脈沖、周期性的特征,能夠對此類周期信號進行搜索[2]。針對信噪比不高或處理后信號特征不明顯的現狀,采用周期脈沖序列搜索法能夠自動搜索可疑脈沖并自動標記,能克服波形識別方式不準確的缺陷,提高檢測增益[3]。
1 周期脈沖序列搜索法
1.1 周期脈沖信號形式
設待檢測信號為x(t),有:

其中s(t)為發射信號,周期為T,有:

將式(2)代入式(1),有:

其中n1(t)無明顯周期性,與n(t)同為噪聲。由式(3)可知,發射信號受噪聲的影響,使得接收信號不再具有周期特征,僅根據周期性特征區分信號缺乏依據。對離散化序列來說,本文研究的信號s(i)還具有窄脈沖特征,即能量集中且周期內有效信號的持續時間短即占空比高。若信號形式為CW脈沖,那么s(i)可表達為:

其中A>0,為發射信號幅度,Δ為相對有效信號中心的浮動范圍。
那么,信號功率為:

相同情況下,噪聲功率為:

信噪比為:
以聲納探測中使用的聲信標信號為例,1 s周期內的脈沖寬度為10 ms,占空比為1%,那么
由式(8)可以推算,對于信噪比SNR=0 dB的信號,信號與噪聲的幅值之比約為3.16,即通過波形能夠直觀觀察到周期特征識別信號。信號與噪聲幅值相當時,推算對應信噪比為-10 dB左右,本文以5 dB信號。
局部損傷的軸承振動信號,水下聲信標信號一類信號具有周期性和脈沖性。此類信號能量集中但對整體信號的能量貢獻不高,在噪聲存在的情況下,整體能量均值接近噪聲的能量均值。依據此理論,可以根據整體信號的幅度均值來估算噪聲的幅度均值,進而設定一個門限隔離大部分噪聲實現脈沖初步篩選。脈沖序列搜索法流程如圖1所示,即通過閾值對脈沖進行初步篩選,然后利用單脈沖位置信息對多脈沖取舍,最后還原為時間信息并進行后續處理。
1.2 閾值篩選
根據信噪比大小,可以分為以下三種情況進行討論:
(1)信噪比較高時,脈沖幅值遠高于噪聲,波形上可明顯區分;
(2)信噪比一般時,脈沖幅值與噪聲水平相當,波形上噪聲與脈沖摻雜,人眼憑借周期特性判別信號不準確,無法區分;
(3)信噪比較低時,脈沖幅值低于噪聲,波形上無脈沖特性。
本文主要研究第二種情況。首先,根據信號的整體幅度均值設定一個閾值Tr對信號的峰值進行篩選,比較各采樣點的幅度A與wM的大小(M為信號幅度均值),此處的幅度均指信號的絕對值。由于最終獲取的是信號的位置信息而不是幅度大小,經過閾值處理后對大于wM的信號幅值保留并賦值為1,其余置零處理。信號脈沖篩選情況,如圖2所示。
確定脈沖方法中應依據實際情況調整w的大小,使得篩選出的峰值數目適中。若w過小,則脈沖數目過多,會導致引入的虛假峰值增多,增加不必要的運算量;若w過大,則脈沖數目變得過少,會濾掉有效脈沖。
可以斷定,如果Tr選擇不好,將直接影響檢測結果。圖2中,在聲信標信號基礎上添加噪聲,使得信噪比為-5 dB,其中白色實線為整體幅度均值M,黑色虛線為閾值設定均值4M,使得篩選后脈沖數目bk=21。
2 脈沖位置搜索
信號中的脈沖為高頻諧波信號,具有脈沖特性但并具有單一幅值。因此,不能依據每點的幅值大小進行提取。經過篩選后的脈沖成分,可分為幾種情況:
(1)部分信號脈沖和部分噪聲虛假脈沖;
(2)全部為噪聲虛假脈沖;
(3)全部為信號脈沖。
其中(1)為普遍現象,而(2)與(3)存在于信噪比極低和極高的情況下。信噪比極高情況下,信號通過信號處理環節可以從波形上識別而無需檢測算法進一步分析。信噪比極低時,算法的處理能力已到達上限,即使檢測到信號也不具可靠性,檢測到的都是噪聲引起的虛假脈沖。
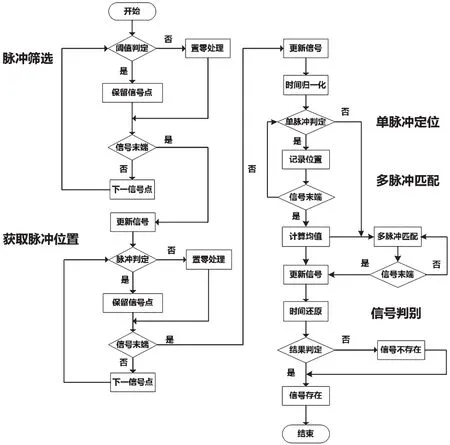
圖1 脈沖序列信號搜索流程
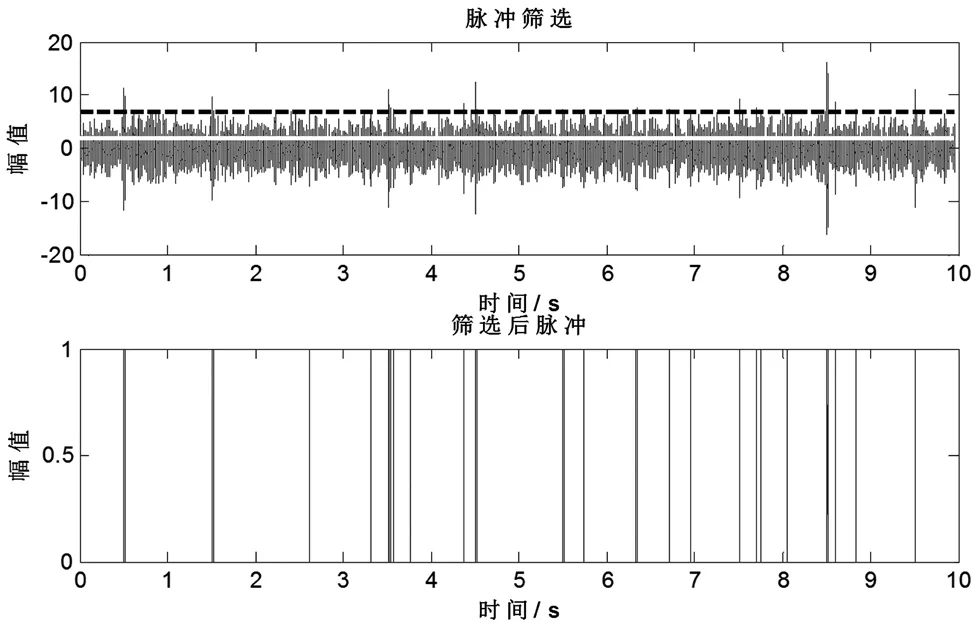
圖2 信號脈沖篩選情況(SNR=-5dB,w=4,bk=21)
針對此種情況,若在某點處幅值不為0,且滿足在該點之后的k*fs點幅值都為0,則認為是脈沖而保留,其余點置零。本文中采樣率為fs=312 500 Hz,取k=0.006 4,即某點幅值不為0時,繼續考察其后約2 000個點的情況。若幅值都為0,判定為脈沖并記錄位置。處理前,需要將信號延長k*fs點并賦值為1,以考察所有真實的信號點。k*fs必須小于脈沖周期對應點數,否則會覆蓋脈沖。需要說明的是,此環節記錄的位置取脈沖后沿,因此后文仿真中的脈沖均發生在每個周期中的后0.51 s處。
將上述脈沖篩選后的脈沖更新后,獲取當前信號每一個脈沖的位置,然后按先后順序排列成數組,結果如表1所示,當前位置信息以點計數。
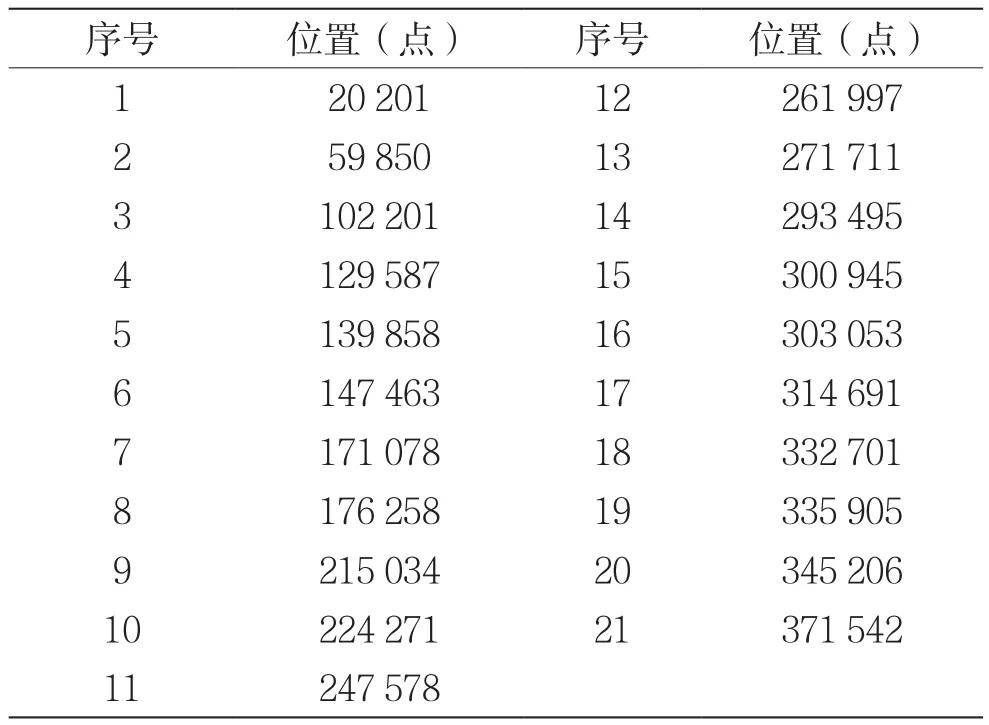
表1 篩選后脈沖的位置信息
在信號微弱且信噪比很小的情況下,經脈沖篩選后,信號依然存在很多幅值相當的脈沖,即這些脈沖的間隔很小,分布在各個時間點。因此,可以適當調小k的值,以保留多數的脈沖,但必須注意過小的k會增加運算量。相反地,如果信噪比比較大時,可以適當加大k的值。通常,k取0.001~0.01。運用以上步驟完成信號脈沖的提取,參數設置得當可以最大化有效脈沖的數目,同時降低不必要的運算量。
2.1 單脈沖定位
經過上述處理,此時更新后的信號成分都為脈沖,包括真實脈沖和虛假脈沖。因此,需要對脈沖進行篩選,依據的原則是信號的周期特性。
若信號的長度為t,保留0~1 s信號不變,1~2 s信號向前移動1 s,如信號采樣率fs=312 500 Hz,則對處于1~2 s內的第400 321點向前移動fs,于是原處于400 321點的信號幅值不變而坐標變為87 821。以此類推,直到所有信號都歸一到前一秒信號中。但需要注意,信號歸一化會丟失時間信息,導致無法還原真實位置信息,因此處理前必須將信號所處的時間段信息保存。
首先,將信號(這里指上述處理后的信號,即待檢測的信號)以秒為單位分別劃分至1 s內,使各秒的信號同步在單位時間內。同時,將上述產生的一維數組轉換為矩陣,型為t×bk,矩陣元素所在的行數為脈沖所在的時間,t行內所有位置信息對應的脈沖發生在t-1~t的時間段內,位置信息矩陣如表2所示。
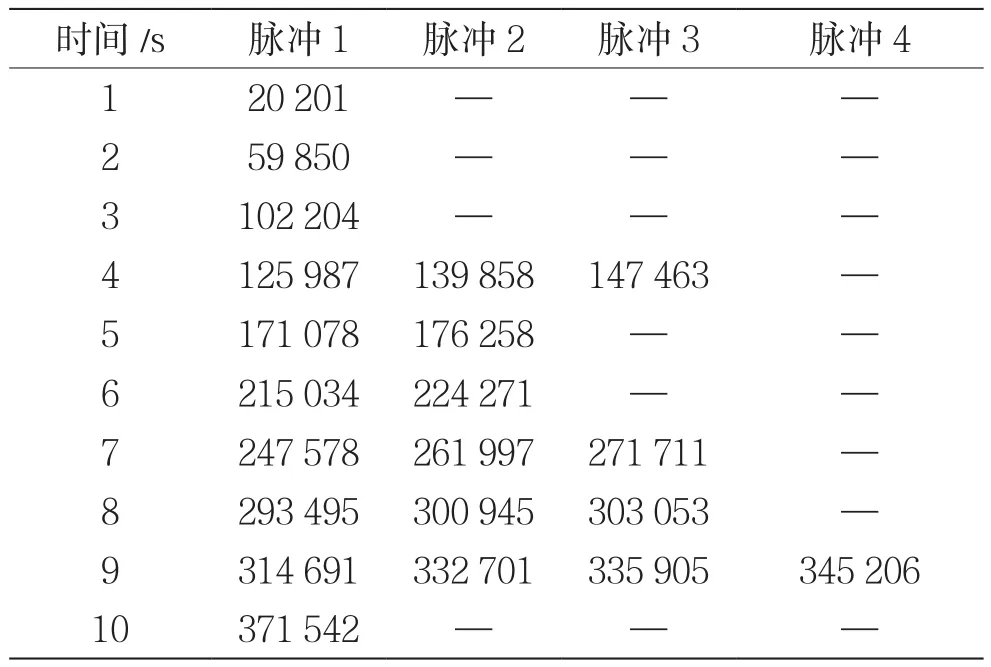
表2 位置信息矩陣
經過處理后,信號的位置信息更新在矩陣中,此仿真信號矩陣為10×21。由于矩陣較大列舉困難,表2已經進行了優化,并不是實際的矩陣情況。由于在脈沖篩選環節時篩選的脈沖數目并不確定,因此數組應比實際檢測的數目大,本文取1×100,且位置更新矩陣列數也設置為100。根據上述理論,脈沖數目bk>30時,可以認為噪聲干擾較大。因此,使用100×100的矩陣足夠。
更新后的矩陣可以依據脈沖所在的行進行分析和判定單脈沖時間段與多脈沖時間段的比例。可以判定,10個信號段中,單脈沖時間段數目為4,分別存在于0~1 s、1~2 s、2~3 s和9~10 s,其余時間段為多脈沖時間段且數目為6。單脈沖時間段所占的比例尚可,說明信號經過小波分解等處理后,信噪比較高,其位置信息具有利用價值。若信號的信噪比較大,則在單位時間內具有單一脈沖的數目較多;反之,若信號不存在或信噪比很小,則單位時間內具有單一脈沖的數目較少甚至為0。
2.2 多脈沖匹配
為匹配多脈沖時間段的位置信息,同樣必須將所有位置信息換算到單位時間內,即第t秒信號向前移動(t-1)*fs點,更新后矩陣信息如表3所示。
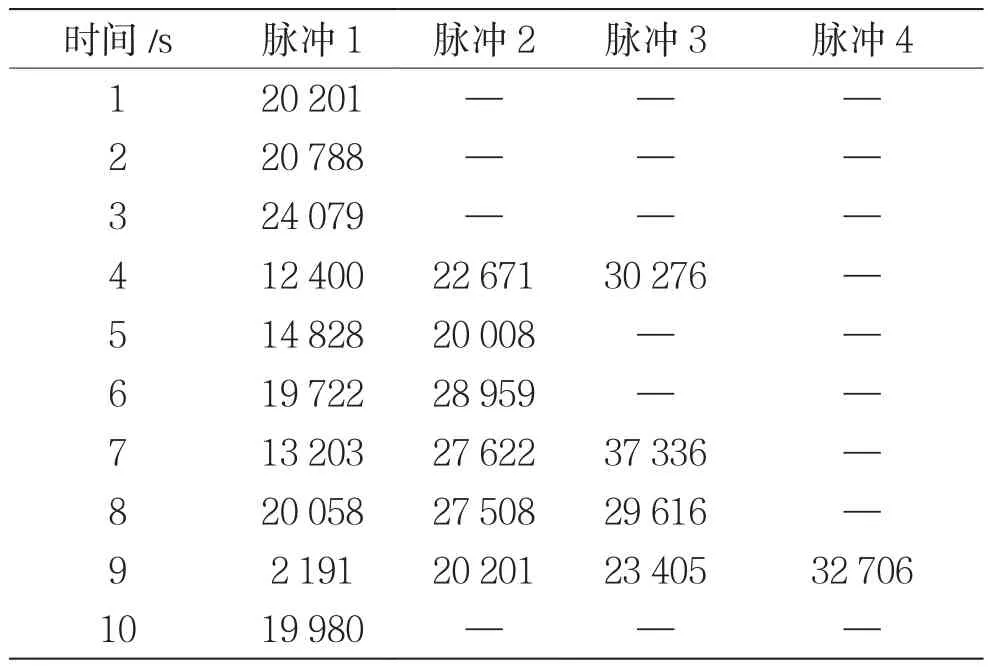
表3 位置信息匹配矩陣
保留信號中單位時間內單一脈沖的位置信息并進行統計。將所有單一脈沖的均值作為脈沖發生時間的匹配標準(下稱匹配標準),并將其與單位時間內非單一脈沖的位置信息進行匹配,如表4所示。可以發現,0~1 s、1~2 s、2~3 s、9~10 s的脈沖位置都處于20 000上下。顯然,3~4 s中,位置信息為12 400及30 276是噪聲引入的虛假脈沖。同理,4~5 s中,位置信息為14 828也是噪聲引入的虛假脈沖。以此類推,將所有距離匹配標準較遠的值剔除,更新矩陣,結果如表4所示。
根據預先設定的位置波動范圍,將處于范圍內的脈沖保留,并置零不滿足條件的脈沖位置信息。此處,將波動范圍設置為±10 000,信號的篩選從第1行即0~1 s開始,考察每一個多脈沖時間段的各個脈沖。如果處于波動范圍內,則進行替換;否則,置零處理。
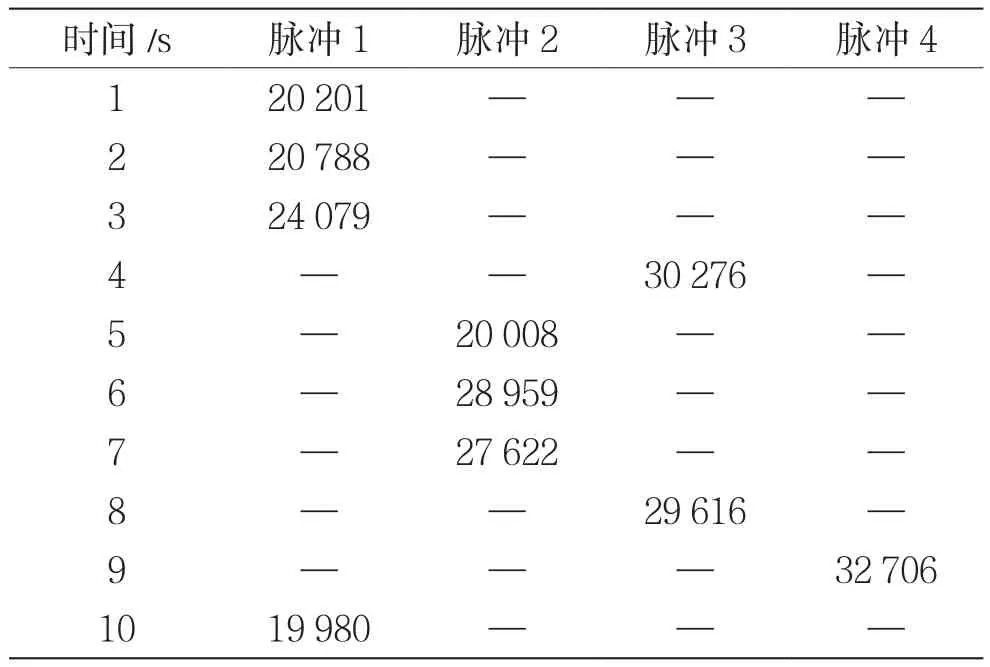
表4 多脈沖匹配后位置信息矩陣
多脈沖時間段的信號經過篩選后,脈沖數目通常為0或1。在參數選取得當的前提下,若信號信噪比較大,則單一脈沖時間段數目較多。隨著信噪比逐漸降低,單一脈沖時間段的數目逐漸減小,而多脈沖時間段逐漸增多。這是因為噪聲引入了較多虛假脈沖,根據匹配標準對多脈沖時間段匹配后,如果信噪比較大,則可以匹配到的脈沖數目為1,信噪比較低則會產生匹配不到或者匹配到多余1的脈沖數目。總之,此步驟的目的是盡可能依據匹配標準將多脈沖時間段轉化為單脈沖時間段。
最后,將所有的位置信息合并,并將單位時間位置信息還原為真實時間下的位置信息,確定信號點的位置,結果如表5所示。
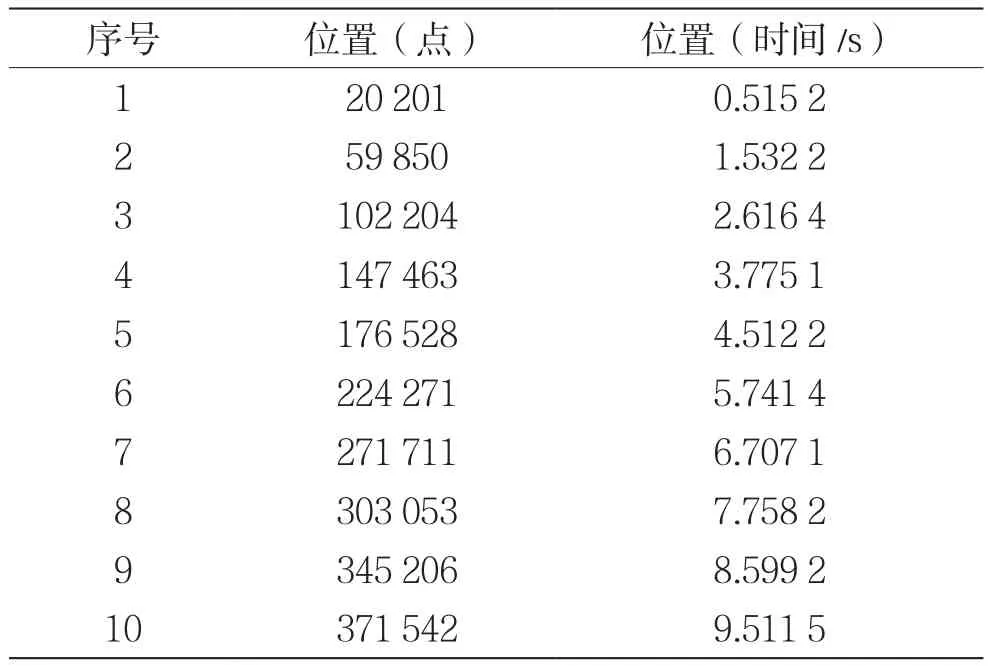
表5 時間還原后位置信息矩陣
3 結 語
針對工程中周期脈沖形式的信號檢測,提出了周期脈沖序列搜索法。通過閾值篩選、單脈沖定位、多脈沖匹配和設定參數等一系列環節后,該方法能在一定信噪比條件下對脈沖信號序列進行自動檢測,處理高效且位置信息準確可靠,可保證后續信號步驟的進行。
[1] 李笑媛,程晶,那健.一種基于DSP的聲信標信號提取方法[J].艦船科學技術,2014,36(305):125-127.LI Xiao-yuan,CHENG Jing,NA Jian.An ULB Signal Extraction Method Based on DSP[J].Ship Science and Te chnology,2014,36(305):125-127.
[2] 沈風麟,葉中付,錢玉美.信號統計分析與處理[M].合肥:中國科學技術大學出版社,2003.SHEN Feng-lin,YE Zhong-fu,QIAN Yu-mei.Signal Statistical Analysis and Processing[M].Hefei:Press of USTC,2003.
[3] 肖洪梅,吳健.微弱激光脈沖信號的相關檢測[J].光學與光電技術,2004,28(01):234-236.XIAO Hong-mei,WU Jian.The Relevant Detection of Weak Laser Pulse Signal[J].Optical and Optoelectronic Technology,2004,8(01):234-236.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32