車載天線指向精度的研究
2018-03-21 08:30:31劉會鋒李艷梅
無線電工程 2018年4期
劉會鋒,李艷梅
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;2.中國人民解放軍63756部隊,山東 青島 266100)
0 引言
衛星通信是地球上的無線電通信站間利用衛星作為中繼而進行的通信。衛星通信系統由衛星和地球站2部分組成。衛星通信的特點是:通信范圍大,只要在衛星發射的電波所覆蓋的范圍內,從任何兩點之間都可進行通信;不易受陸地災害的影響,只要設置地球站電路即可開通;同時可在多處接收,能經濟地實現廣播、多址通信。
隨著我國現代化建設和以多媒體為代表的信息高速公路的發展,今后10年我國衛星通信將有一個更大的發展,并將以自主的大容量通信衛星為主體,建立起完善、長期穩定運行的衛星通信系統。逐步開展車載衛星移動通信服務,石油、地質、新聞、水利、外交、海關、體育、搶險救災、銀行、安全、軍事和國防等部門均配備了相應業務終端,其中車載天線是車載衛星通信的重要組成部分。
在車載天線系統中指向精度是很重要的一個指標,也是比較難測試的指標,車載天線能否正常使用和指向精度直接相關,系統的每一個環節都有可能影響到指向精度,比較重要的環節主要是車體結構、天線結構和伺服控制系統,目前車載天線系統應用很多,設計方法也各不相同,本文從車體結構、天線結構和伺服控制的設計入手介紹提高指向精度的方法[2]。
通過分析影響車載天線系統指向精度的因素,從結構設計和伺服控制算法入手,給出解決方法。
1 車載天線系統分析與設計
車載天線系統主要由天線控制單元、天線驅動單元、軸角編碼單元、安全保護單元和車載座架單元等組成,系統組成框圖如圖1所示。
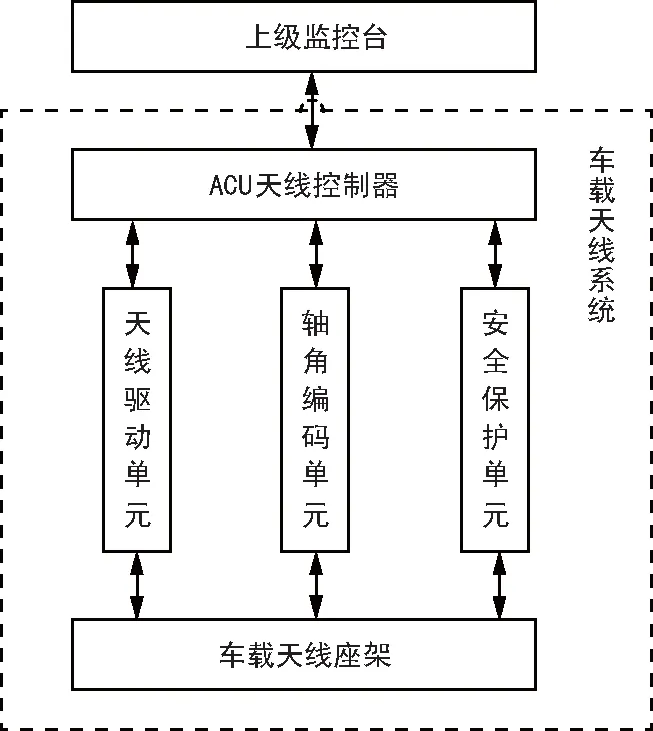
圖1 車載天線系統組成
1.1 天線控制單元
天線控制單元(ACU )主要包括嵌入式控制器EC-4217,支持4路DI(24 V輸入,懸空認為低電平),4路DO(繼電器輸出,最大電流2 A),3路RS232,2路RS422及1路RS485,2路隔離CAN總線接口,2路10/100 Mbps工業以太網接口,4路16位ADC,輸入信號范圍為±10 V,4路12位DAC。
ACU是天線控制系統的核心部分,天線控制軟件運行在ACU內,通過ACU的前面板可以完成對天線的操作,在遠控模式下接收上級監控臺的指令,完成所需要的任務。
通過CAN口通信采集軸角傳感器的數據、通過DO端口采集安全保護單元的狀態,結合控制指令和控制算法計算出天線需要轉動的速度和角度,最終控制天線驅動單元驅動天線轉動,完成所需要的跟蹤任務,天線控制單元是車載天線系統的運算決策部分[3]。
1.2 天線驅動單元
天線驅動單元的主要作用是根據天線控制單元的指令驅動天線座架轉動,完成跟蹤目標的任務,天線驅動單元是車載天線系統的動力執行部分。
現在常用的天線座架由方位轉軸和俯仰轉軸2部分組成,所以天線驅動單元分為方位軸驅動單元和俯仰軸驅動單元2部分,分別驅動天線的方位軸和俯仰軸。
天線座架的驅動鏈條主要包括電機、減速機和齒輪組,在驅動過程中存在齒隙,齒隙的大小直接影響到天線的指向精度,尤其減速機和齒輪組的嚙合處齒隙最大。
目前為了減小齒隙最常用的方法是采用雙電機驅動,使用2個電機減速機組合和齒輪組嚙合,在驅動器內有2套驅動系統分別控制2個電機,主要原理是通過力矩偏置和力矩均衡電路去控制電機的工作狀態,保證減速機的齒輪和齒輪組的齒輪機密嚙合沒有齒隙,保證天線的指向精度[4]。
1.3 軸角編碼單元
軸角編碼單元主要包括軸角傳感器和供電電路,軸角傳感器的轉軸和天線座架的轉軸通過同步裝置連接,在天線座架轉動的同時軸角傳感器同步轉動,同時天線控制單元根據軸角傳感器的數據控制天線的位置,所以軸角傳感器的精度決定了天線座架的轉動精度。
試驗中軸角傳感器采用光電碼盤MMCD-C5BD-S06S-PRM-M50,該光電碼盤具有16位精度,能分辨天線座架0.005°的變化,足夠滿足車載天線系統的要求[5]。
1.4 安全保護單元
安全問題是設計中首要考慮的問題,不但要保證操作人員的安全也要考慮設備自身的安全,在設計中使用了3級保護:軟件限位保護、電限位保護和硬件限位保護。
軟件限位是在軟件中設置天線的轉動范圍,如果轉動超出范圍控制驅動器停機。電限位是在天線的極限位置設計接觸式傳感器,如果觸碰到傳感器則控制驅動器停機。硬件限位是在轉動極限位置附近設計阻擋天線轉動的碰塊,如果天線超出極限位置碰撞到碰塊,驅動器過流保護停機。
在天線運輸或大風時防止天線晃動損壞傳動鏈條,設計了入鎖裝置,入鎖軸插入入鎖裝置保證天線在運輸或大風時天線不晃動,防止天線損壞,在天線工作前可以解除鎖定[6]。
2 指向精度分析
指向精度定義為在規定條件下保持天線(對固定指向天線)或轉動天線所能達到的精確度。
指向誤差是指向精度(相對于名義指向)的一種量度,并定義為指令矢量和通信射頻軸之間空間角度差。
指向精度可以規定為在指定頻率上和規定的環境條件下天線波束寬度的百分比[7]。
在工程實踐上指向精度要求為1/5波束寬度,波束寬度的計算公式為:
β=21/fΑ,
式中,β為波束寬度(°);f為波束頻率(kHz);A為天線口徑(m)。
2.1 指向精度誤差源分析
2.1.1 誤差源分類
從誤差性質來講,所有的誤差都分為2類:系統誤差(固有誤差)和隨機誤差。
系統誤差是指固定不變或有變化規律的誤差,系統誤差可以通過一定的方法進行標定和消除[8]。
隨機誤差是指沒有固定數值和變化規律的誤差,隨機誤差產生的原因是非常復雜的,任何系統誤差源都會產生隨機誤差。
隨機誤差符合一定的統計規律,其數字特征一般有2個:算術平均值和標準方差。
算術平均值通常是隨機誤差分布的中心;標準方差則反應隨機誤差以算術平均值為中心的分散特性,即方差越大,數據越分散。
一般情況下,天線指向精度的隨機誤差符合正態分布規律。
2.1.2 重力載荷影響分析
重力載荷引起系統誤差分量,它隨天線仰角而變化,對于車載天線來說,反射器對于俯仰軸是平衡的,故重力載荷不產生與取向有關的偏差。引起指向誤差效應最重要的重力變形是主反射器結構的下垂與撓曲的結果。由于支撐的幾何關系,副反射器位移的效應部分地抵消了反射器轉動效應。反射器、俯仰驅動機構及副反射器位移的合成效應導致系統誤差,在俯仰軸讀出的這一誤差可歸因為與反射器軸垂直的重力的分量,這一誤差隨仰角的余弦而變化。值得注意的是由反射器的重力變形而引起的波束偏轉其方向因支撐而異。
重力變形誤差很難建立數學模型,一般用下面的經驗公式來近似計算。也可以建立一個與俯仰相關的數據修正表,采用查表法進行修正。
ΔE=βcosE,
式中,ΔE為俯仰變形角度(°);E為俯仰的當前角度;β為重力變形系數。
2.1.3 風載荷影響分析
車載天線所受的風載荷作用有很多種,風不僅可以引起車載天線結構受力的變化,也可以引起天線結構的震動,所以風載荷的分析對車載天線至關重要。
由風載荷引起的指向誤差是風速以及相對于風向的天線取向的函數,它包括反射器結構的偏差以及座架和基礎的撓曲和轉動。天線結構的力和力矩是風速(空氣的速度) 以及天線相對于風的取向的函數。受氣流的影響,風速在時間上是連續和隨機變化的,它可以用非零平均高斯過程來描述。對于任意給定地點,經過研究發現風速的標準差是正比于平均風速的,其比值或常數與局部地形特征有關。
對于采用圓形拋物面的車載天線,在二維體軸坐標系內,風載荷有3個變量,計算公式為:
Fc=CcqA,FA=CAqA,
FM=CMqAD,q=0.5βV2,
式中,Fc為橫向力;FA為軸向力;FM為風力矩;Cc、CA為風力系數;CM為風力矩系數;A為天線的面積;D為天線表征尺寸;β為空氣密度;V為風速[9]。
某型車載天線的仿真結果如表1所示。
表1 仿真結果表

平均風速/(km/h)方位誤差/(°)俯仰誤差/(°)系統隨機系統隨機48.20.0080.0030.0020.00148.20.0170.0050.0050.002
2.1.4 溫度變化影響分析
因為天線結構使用鋼結構,均勻的溫度變化導致均勻的膨脹或收縮,不產生指向誤差。當天線處于天頂位置時,太陽輻射導致變形,這一變形對射頻軸是軸對稱的,這種變形影響反射器的表面精度,但不產生任何指向誤差,當天線接近水平時,溫度效應產生橫過反射器的熱梯度而引起指向誤差。此時反射器的上部比下部溫度高,這就引起射頻軸下垂。類似地,橫過座子結構的溫度梯度使座子發生撓曲。根據測試估計出當天線水平并無風時1.2 kW/m2太陽輻射導致約5 ℃的溫度梯度。有風時不可能產生這一溫度梯度。可以假定從水平到天頂的熱載荷引起的誤差隨仰角成余弦變化[10]。
主反射面的變形對指向精度的影響很大,車載天線工作在室外環境,環境的變化直接影響到車載天線,尤其天線面的熱變形會引起主反射面的軸線偏轉,導致天線的發射或接收波束方向偏移,最終表現為天線的指向精度降低。
主反射面軸向偏轉0°、0.015°、0.05°情況下天線波束偏轉的仿真結果如表2所示。
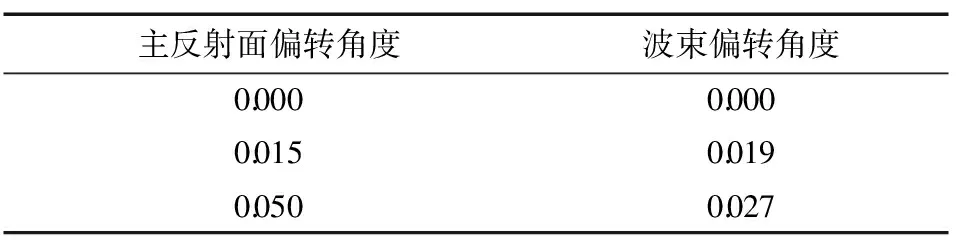
表2 主反射面熱變形對天線波束指向的影響 (°)
副反射面在環境溫度變化時也可能產生偏轉角,這種偏轉角的變化導致天線散焦、天線副瓣不對稱、發射或接收的波束指向改變。副反射面軸向偏轉0°、0.015°、0.05°情況下天線波束偏轉的仿真結果如表3所示。
表3 副反射面偏轉角對天線波束指向的影響
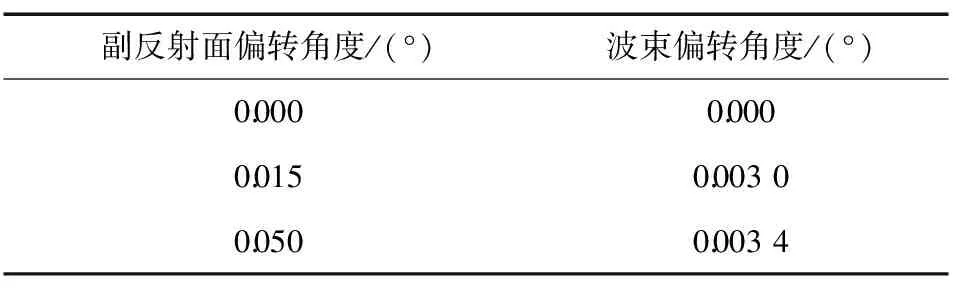
副反射面偏轉角度/(°)波束偏轉角度/(°)0.0000.0000.0150.00300.0500.0034
副反射面由于熱變形有可能產生橫向位移。以副反射面焦平面中心為基點,對副反射面發生橫向位移的情況進行分析,副反射面橫向位移0°、0.05mm、0.15mm情況下天線波束指向的仿真結果如表4所示。
表4 副反射面橫向位移對天線波束指向的影響
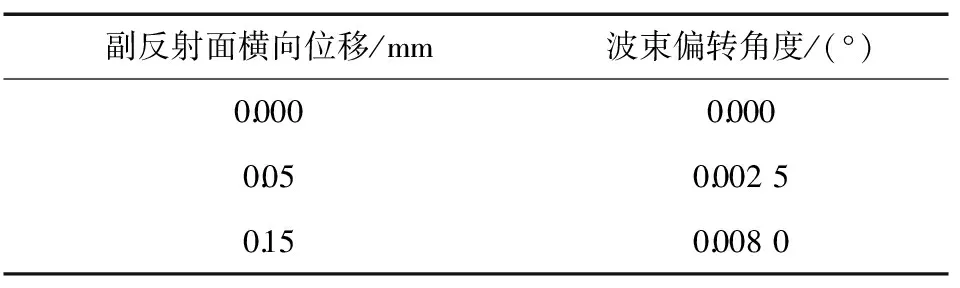
副反射面橫向位移/mm波束偏轉角度/(°)0.0000.0000.050.00250.150.0080
從以上分析中發現,環境溫度的變化可以導致天線波束指向的變化,主要表現形式有3種:主反射面軸線偏轉、副反射面軸線偏轉和副反射面橫向位移,這3種形式中最主要的影響是主反射面軸偏,其他2種可以忽略不計[11]。
2.2 指向精度誤差解決方法
2.2.1 克服重力和溫度變化的影響
碳纖維復合材料/鋁蜂窩夾層結構具有很多優點,主要是彈性模量與密度、線脹系數之積的比值遠高于傳統天線面板的金屬材料,在高端結構件中使用很多,所以在設計中采用碳纖維復合材料/鋁蜂窩夾層結構制作天線主反射面和副反射面[12]。
在天線主反射面和副反射面的設計過程中需要解決很多關鍵技術,主要有原材料的篩選、負壓模具的設計、膠粘劑的選擇、夾層結構性能試驗和成型工藝參數確定等多項關鍵環節,再次過程中需要大量的計算和實驗。最終決定使用低膨脹合金模具來實現碳纖維蒙皮的預置成形及蒙皮與蜂窩的膠粘成形。通過施加真空負壓,使雙層碳纖維蒙皮和蜂窩等分離組件被壓貼在模具上并由粘接劑膠接固化為一整體,實現反射面面板在小剛度下成形,大剛度下定型。經此種工藝方法制造出的反射面型面精度可達到δ≤0.15 mm(R.M.S)。
碳纖維復合材料最大的優點是具有充分的設計自由度,可實現多種天線結構形式,靈活多變。碳纖維復合材料天線在制作過程中采用高溫、高壓模具成型,所以天線面具有很高的曲面精度,并且碳纖維復合材料具有耐腐蝕、壽命長、重量輕和強度好等優點。
考慮到加工、制造和安裝的要求,天線采用分瓣組裝方式,中間部分為對稱的3塊,兩側折疊部分各一塊。
天線反射器和負反射器質量輕,重力變形小,熱脹冷縮系數小,基本不受重力和溫度變化的影響。
2.2.2 克服風載荷的影響
車體采用高精度自動調平系統,工作時4個支腿支撐天線,增加車體的穩定性。
伺服控制系統中采用雙機消隙系統,消除了齒隙和傳動誤差帶來的影響,同時采用智能PI控制算法,增強了系統剛度和抗干擾性。
伺服控制的主要參數是天線的位置,根據理論位置和實際位置的誤差控制天線向減小誤差的方向轉動,在智能PI(比例、積分)控制算法中根據誤差的大小分成多個區間,在不同的區間內使用不同的參數,保證系統響應的快速性和控制策略過渡的平穩性,在小誤差范圍內使用PI算法控制[13]。
PI算法的特點是二階無靜差,經過一定時間的控制后可以達到靜態誤差為零,開環傳遞函數如下:
式中,K(s)為傳遞函數;Ka為系統增益;T為采樣周期;τ為時間常數;ξ為阻尼系數。該式的對數頻率特性曲線如圖2所示。
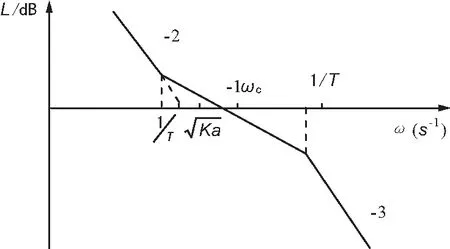
圖2 開環對數頻率特性曲線
在PI算法的編程實現過程中需要采用離散化處理,目前比較容易實現編程的離散算法是增量式數字PI控制算法,主要思想是數字調節器的輸出只是控制量的增量U(k),其表達式為:
U(k)=Kp×[e(k)-e(k-1)+e(k)×Ts/Ti],
式中,Kp為比例放大系數;Ts為采樣周期;Ti為積分時間常數;U(k)為當前增量輸出;e(k)為第k次偏差[14]。
智能PI控制算法在實際自動控制使用很廣,算法越來越成熟,無論是使用單片機還是使用工控機作為控制器都能方便地通過編程來實現算法[15]。
通過結構和伺服控制算法的改進增強了車載天線的穩定性和抗風性能。
3 應用分析
在某型車載天線系統中指向精度估算表如表5所示,其中,Δ總為總均方根誤差,

表5 指向精度估算表
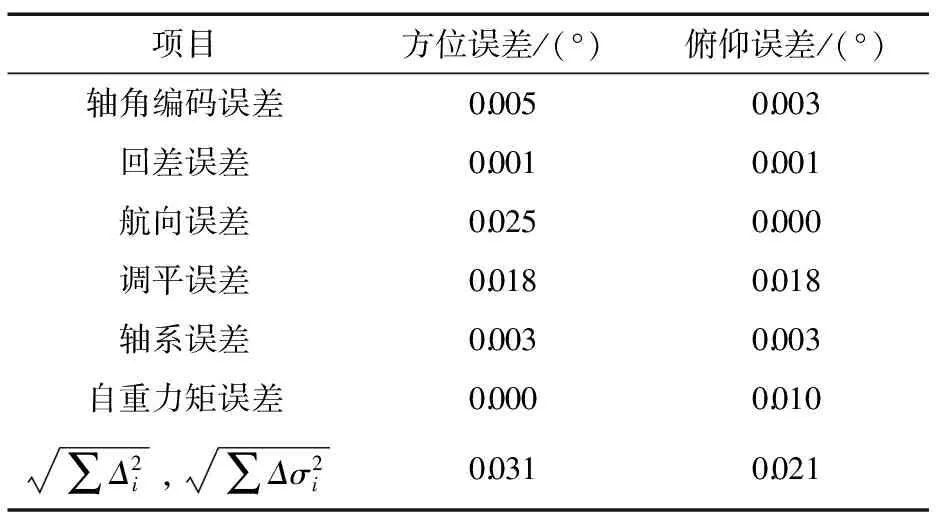
項目方位誤差/(°)俯仰誤差/(°)軸角編碼誤差0.0050.003回差誤差0.0010.001航向誤差0.0250.000調平誤差0.0180.018軸系誤差0.0030.003自重力矩誤差0.0000.010∑Δ2i,∑Δσ2i0.0310.021
最高工作頻率12.745 GHz,理論波束寬度為0.26°,指向精度為優于1/5半功率波束寬度,即要求為0.05°。經表5核算,指向誤差為0.037 8°<0.05°[16]。實際測試記錄如表6所示。
表6 指向精度測試記錄
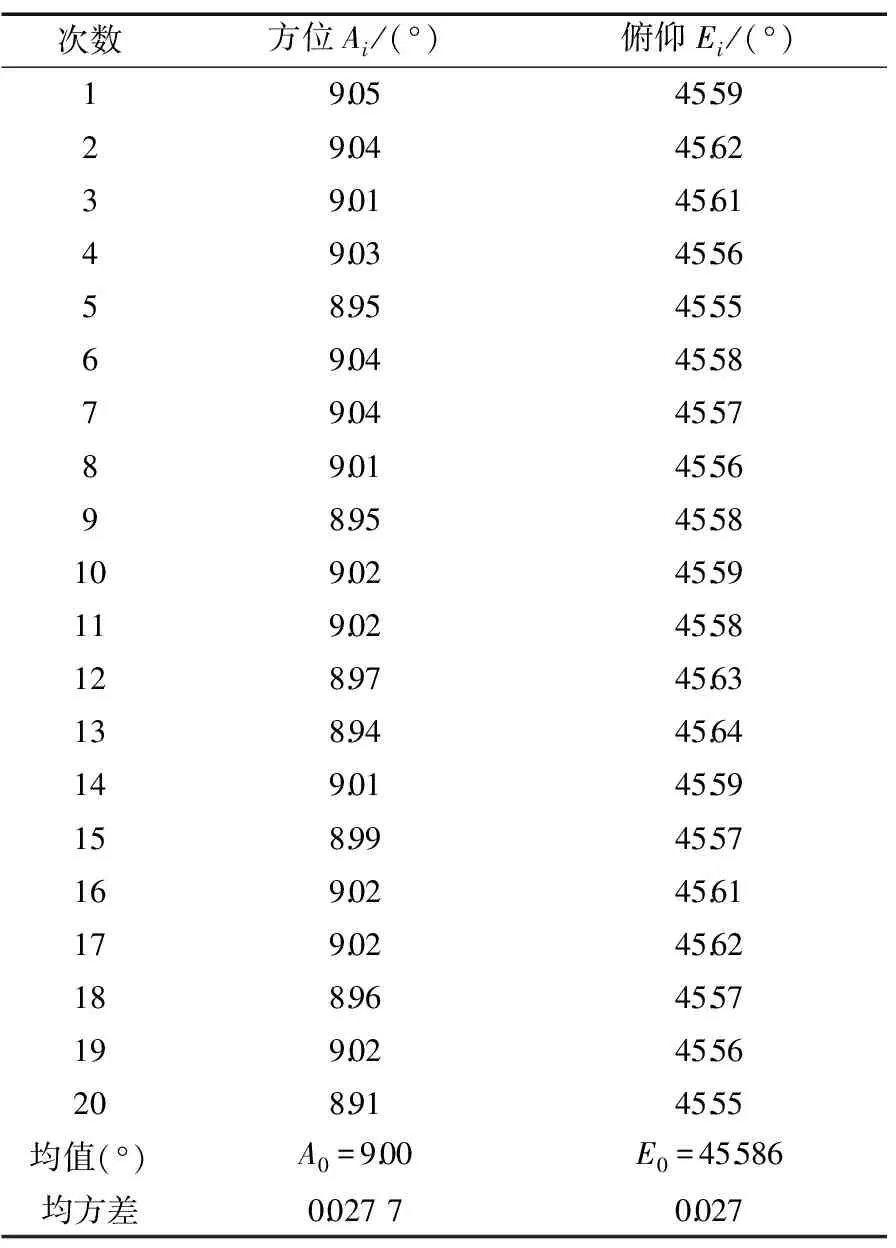
次數方位Ai/(°)俯仰Ei/(°)19.0545.5929.0445.6239.0145.6149.0345.5658.9545.5569.0445.5879.0445.5789.0145.5698.9545.58109.0245.59119.0245.58128.9745.63138.9445.64149.0145.59158.9945.57169.0245.61179.0245.62188.9645.57199.0245.56208.9145.55均值(°)A0=9.00E0=45.586均方差0.02770.027
實際測試的結果0.0387°<0.05°,通過測試和實際應用指向精度有了顯著提高。
4 結束語
本文分析了影響車載天線指向精度的主要因素,通過仿真得出各影響因素的模型,在此基礎上提出了解決方法,通過改進車體結構、天線結構和伺服控制算法來提高系統的指向精度,經過分析和實際測試證明本文的方法是正確的,所以本文對車載天線系統的設計有指導的作用。
[1] 魏英杰.AXY天線座在船用衛星通信天線中的應用[J].無線電工程,2014,44(9):45-47.
[2] 王永驥.自動控制原理[M].北京:化學工業出版社,2015:32-35.
[3] 李麗嫻,胡俊毅,王建中.一種新型C波段輕型低副瓣線陣天線[J].無線電工程,2014,44(10):55-58.
[4] 劉超,牛傳峰,耿京朝,等.射電頻譜日像儀2 m天線設計[J].無線電通信技術,2014,40(6):58-60.
[5] 柯樹人.自跟蹤天線和、差口對源天線輻射場的近場響應[J].通訊與測控,1990(3):1-10.
[6] 杜曉恒,秦順友,任冀南,等.低副瓣氣象雷達天線增益測量及誤差分析[J].無線電通信技術,2014,40(5):51-53.
[7] 米月英.一種大型桁架衛星通信天線座架的優化設計[J].無線電通信技術,2014,40(2):47-51.
[8] 吳麒.自動控制原理[M].北京:清華大學出版社,1992:67-70.
[9] 秦澤云,王海東,李金良,等.天線面蒙皮真空導入整體成型充模仿真及優化[J].無線電通信技術,2016,42(5):53-55.
[10] 秦順友,王小強.微波毫米波大氣衰減和天空噪聲溫度的計算[J].無線電工程,2016,46(5):1-4.
[11] 韓文澤,董旭峰.衛星地面站天線的最優跟蹤技術[J].無線電工程,2005,35(5):44-46.
[12] 劉文珽.結構可靠性設計手冊[M].北京:國防工業出版社,2008:56-59.
[13] 阮云國,鄧智勇,張博.機械調整式極化跟蹤器[J].無線電通信技術,2014,40(3):55-57.
[14] 趙長安.控制系統設計手冊[M].北京:國防工業出版社,1991:52-55.
[15] 張文波,路志勇,武偉,等.一種波束切換機載測控天線的設計方法[J].無線電工程,2014,44(5):52-55.
[16] 王長松.控制工程基礎[M].北京:高等教育出版社,2015:61-65.