基于ESO的BTT飛行器多變量解耦控制方法研究
2018-03-23 01:59:34杜立夫趙志芳
上海航天 2018年1期
杜立夫,張 瑞,趙志芳,閔 勇
(北京航天自動(dòng)控制研究所,北京 100854)
0 引言
傾斜轉(zhuǎn)彎(BTT)飛行器采用高升阻比的面對(duì)稱氣動(dòng)外形,能產(chǎn)生高升力、大過載,在機(jī)動(dòng)性、穩(wěn)定性、升阻比特性和沖壓發(fā)動(dòng)機(jī)進(jìn)氣口設(shè)計(jì)的兼容性等方面,相比側(cè)滑轉(zhuǎn)彎(STT)飛行器有顯著的性能優(yōu)勢[1-2], 受到國內(nèi)外相關(guān)研制單位的高度重視,且發(fā)展迅速。
BTT飛行器的機(jī)動(dòng)過程是:利用滾動(dòng)通道快速將飛行器最大升力面滾轉(zhuǎn)到所要求的機(jī)動(dòng)方向;利用俯仰通道控制飛行器,使其在最大升力面內(nèi)產(chǎn)生相應(yīng)的攻角,獲取需要的過載;利用偏航通道嚴(yán)格控制側(cè)滑角,協(xié)調(diào)控制俯仰通道和滾轉(zhuǎn)通道的運(yùn)動(dòng),使側(cè)向過載和側(cè)滑角近似為零。故BTT飛行器的滾動(dòng)角速率和滾動(dòng)角度比STT飛行器大很多。另外,側(cè)向風(fēng)引起的斜吹力矩和不確定性因素會(huì)產(chǎn)生相應(yīng)的瞬間側(cè)滑角,致使飛行器俯仰通道、偏航通道和滾轉(zhuǎn)通道之間嚴(yán)重耦合,從而使飛行器系統(tǒng)成為一個(gè)強(qiáng)耦合、復(fù)雜的多變量系統(tǒng)[3]。傳統(tǒng)的三通道獨(dú)立控制設(shè)計(jì)已不再適用于BTT飛行器,控制系統(tǒng)設(shè)計(jì)時(shí)須考慮運(yùn)動(dòng)學(xué)耦合、慣性耦合、氣動(dòng)耦合和控制作用耦合等多自由度耦合問題。
隨著控制理論與應(yīng)用的不斷發(fā)展,越來越多的先進(jìn)控制技術(shù)(如魯棒控制、滑模控制、非線性動(dòng)態(tài)逆控制等)被應(yīng)用到BTT飛行器的解耦控制中。文獻(xiàn)[4]中建立BTT導(dǎo)彈線性變參數(shù)模型,將耦合視為擾動(dòng),運(yùn)用最小靈敏度特征值配置的魯棒方法完成控制器設(shè)計(jì),但控制方法較為繁瑣,不易實(shí)現(xiàn);文獻(xiàn)[5]中運(yùn)用變結(jié)構(gòu)控制方法完成BTT導(dǎo)彈解耦控制,展示出良好的控制效果,但控制量具有抖動(dòng),需要進(jìn)一步解決;文獻(xiàn)[6]中運(yùn)用非線性動(dòng)態(tài)逆設(shè)計(jì)解耦控制器,解決了BTT飛行器的耦合問題和快速跟蹤問題,動(dòng)態(tài)逆方法是一種有效的非線性控制方法,但非線性動(dòng)態(tài)逆在設(shè)計(jì)過程中對(duì)模型不確定性較敏感,需要增加系統(tǒng)的魯棒性。
自中科院韓京清研究員提出自抗擾控制技術(shù)[7](ADRC)以來,該技術(shù)在理論和工程上取得了巨大的成果[8-9]。這得益于自抗擾控制技術(shù)中核心部分——擴(kuò)張狀態(tài)觀測器(ESO)的引入,它可將系統(tǒng)的不確定性、未建模動(dòng)態(tài)和外部擾動(dòng)等視為“總和擾動(dòng)”,并將其擴(kuò)張成系統(tǒng)變量,然后設(shè)計(jì)狀態(tài)觀測器以實(shí)現(xiàn)對(duì)擾動(dòng)的估計(jì), 將其輸出補(bǔ)償?shù)娇刂葡到y(tǒng)中,從而提高系統(tǒng)的性能。ESO不需要精確的模型信息,結(jié)構(gòu)簡單,易于實(shí)現(xiàn),故其通用性較高,并在理論和工程實(shí)踐中得到不斷的發(fā)展和應(yīng)用[10-12]。
通常,解決多變量耦合控制方法有兩種。一種是將耦合視為擾動(dòng),通過設(shè)計(jì)增加控制器的魯棒性來抑制耦合擾動(dòng)的影響,增加了控制器的復(fù)雜程度,增大了控制器的負(fù)擔(dān),耦合大時(shí)解耦效果會(huì)受到一定的影響;另一種是建立耦合量的先驗(yàn)?zāi)P停ㄟ^補(bǔ)償方法完成解耦控制[13],模型的精確度會(huì)影響解耦控制的效果。為此,本文提出一種基于ESO的BTT飛行器多變量解耦控制方法,用反饋機(jī)制建立能觀測耦合擾動(dòng)作用的擴(kuò)張狀態(tài)觀測器,該擴(kuò)張狀態(tài)觀測器并不依賴生成耦合擾動(dòng)的具體數(shù)學(xué)模型,也無須直接測量其作用,利用已知三通道獨(dú)立設(shè)計(jì)控制器模型即可完成擴(kuò)張狀態(tài)的觀測,不需要其他模型量即可實(shí)現(xiàn)對(duì)耦合擾動(dòng)的估計(jì)與補(bǔ)償,進(jìn)一步設(shè)計(jì)獨(dú)立三通極點(diǎn)配置的閉環(huán)反饋控制器,完成多變量的解耦控制,是一種通用、實(shí)用、便于工程實(shí)現(xiàn)的方法。
1 數(shù)學(xué)模型的建立
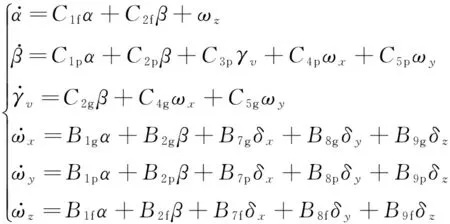
(1)
式中:α為攻角;β為側(cè)滑角;γv為速度傾側(cè)角;δx為滾動(dòng)舵偏角;ωz為俯仰角速度;ωy為偏航角速度;ωx為滾轉(zhuǎn)動(dòng)角速度;δy為偏航舵偏角;δz為俯仰舵偏角;C、B為動(dòng)力學(xué)方程系數(shù),下角標(biāo)f,p,g分別表示俯仰通道、偏航通道和滾轉(zhuǎn)通道。顯然,BTT飛行器數(shù)學(xué)模型是一個(gè)多變量耦合系統(tǒng)。
2 基于ESO的多變量解耦控制
將式(1)中的全部耦合項(xiàng)去掉,并將耦合項(xiàng)視為擾動(dòng),利用已知獨(dú)立三通道模型設(shè)計(jì)ESO,觀測耦合擾動(dòng),通過補(bǔ)償方法進(jìn)行解耦,進(jìn)一步設(shè)計(jì)穩(wěn)定的、獨(dú)立三通極點(diǎn)配置的閉環(huán)反饋控制器,完成基于ESO的多變量解耦控制。
2.1 ESO的設(shè)計(jì)介紹
ESO是自抗擾控制技術(shù)[7]的重要組成部分,它可較為精確地估計(jì)出系統(tǒng)當(dāng)前的不確定性,將這種不確定性補(bǔ)償?shù)娇刂葡到y(tǒng)中,從而增加系統(tǒng)的抗干擾能力。下面將闡述ESO的設(shè)計(jì)過程。
以2階系統(tǒng)為例,多變量線性系統(tǒng)模型可表示為
(2)
式中:F(x1,x2)和G(x1,x2)為系統(tǒng)關(guān)于x1和x2的非線性函數(shù)向量模型,x1∈Rn、x2∈Rn均為系統(tǒng)狀態(tài)向量,u∈Rm為控制輸入向量。假設(shè)系統(tǒng)的一部分模型已知,把這個(gè)模型稱作名義模型,則式(2)可改寫為
(3)
式中:F0(x1,x2)、G0(x1,x2)為名義模型,而Fu(x1,x2)、Gu(x1,x2)為未知模型。則需要擴(kuò)張的狀態(tài)向量可表示為
d=Fu(x1,x2)+Gu(x1,x2)u
(4)
根據(jù)式(3)和式(4),ESO設(shè)計(jì)式為
(5)
式中:向量z1為對(duì)系統(tǒng)向量x1的估計(jì);向量z2為對(duì)系統(tǒng)向量x2的估計(jì);z3為對(duì)不確定性向量d的估計(jì);β01、β02、β03為ESO設(shè)計(jì)參數(shù),使其均大于零即可保證擴(kuò)張狀態(tài)觀測器穩(wěn)定收斂[7];f(e,κ,δ)為原點(diǎn)附近線性、連續(xù)的冪次函數(shù),即
(6)
式中:e為ESO的偏差輸入;δ為線性區(qū)間長度,一般取較小的數(shù);κ為冪次函數(shù)的冪,一般取0.5。
由式(5)可知,把名義模型放入擴(kuò)張狀態(tài)觀測器中,可得
(7)
此時(shí)被擴(kuò)張的狀態(tài)變量d的估計(jì)值z3(t)估計(jì)的就是作用于系統(tǒng)的不確定性部分,即ESO實(shí)時(shí)估計(jì)擾動(dòng)功能,將這種擾動(dòng)估計(jì)加以補(bǔ)償實(shí)質(zhì)就是抗干擾。
擴(kuò)張狀態(tài)觀測是一個(gè)動(dòng)態(tài)過程,觀測器的結(jié)構(gòu)示意圖如圖1所示。
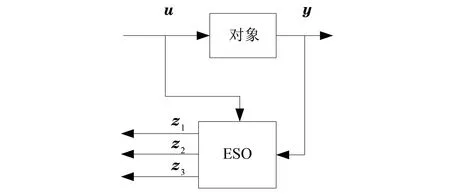
圖1 ESO結(jié)構(gòu)示意圖Fig.1 ESO structural schematic diagram
2.2 ESO的多變量解耦控制器設(shè)計(jì)
將BTT飛行器全量模型式(1),去掉所有耦合項(xiàng)作為三通道獨(dú)立設(shè)計(jì)的名義模型,其狀態(tài)方程可表示為
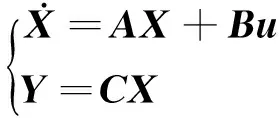
(8)
式中:狀態(tài)變量X=[x1x2x3x4x5x6]T=[αβγvωzωyωx]T;控制變量u=[δxδyδz]T;輸出變量Y=[αβγv]T。狀態(tài)矩陣
(9)

(10)
輸出矩陣C=[I3×303×3]。
把式(8)模型作為名義模型,進(jìn)行ESO設(shè)計(jì),完成狀態(tài)和擾動(dòng)估計(jì),根據(jù)2.1節(jié)ESO設(shè)計(jì)介紹,ESO設(shè)計(jì)如下
(11)

(12)
式中:u0為閉環(huán)反饋控制律。
2.3 ESO的極點(diǎn)配置閉環(huán)反饋控制器設(shè)計(jì)
系統(tǒng)的性能和穩(wěn)定性主要是由系統(tǒng)的特征根決定,即系統(tǒng)的極點(diǎn)。極點(diǎn)配置的狀態(tài)反饋控制方法可使系統(tǒng)獲得更優(yōu)異的性能,下文運(yùn)用極點(diǎn)配置的方法設(shè)計(jì)獨(dú)立三通道控制器,完成閉環(huán)反饋控制。
由式(8)設(shè)計(jì)閉環(huán)狀態(tài)反饋控制律,表達(dá)式為
u0=KX
(13)
式中:K為狀態(tài)反饋控制參數(shù)向量。
將控制律具體形式展開,即
(14)
式中:kf1,kf2為俯仰通道反饋控制參數(shù);kp1,kp2為偏航通道反饋控制參數(shù);kg1,kg2為滾轉(zhuǎn)通道反饋控制參數(shù)。
對(duì)三通道獨(dú)立系統(tǒng)進(jìn)行極點(diǎn)配置,俯仰通道、偏航通道和滾轉(zhuǎn)通道的期望極點(diǎn)分別是-3±4j、-4±6j和-2±6j,由控制理論可知,系統(tǒng)中的特征根均分布在左半平面內(nèi),故可保證系統(tǒng)穩(wěn)定[14]。通過MATLAB中極點(diǎn)配置函數(shù)K=place(A,B,p),即可得到三通道反饋控制參數(shù)向量K。
初始偏差Δα0=1°,Δβ0=1°,Δγv0=1°時(shí)的獨(dú)立三通道系統(tǒng)的零輸入響應(yīng),如圖2所示,可以看出,獨(dú)立三通道系統(tǒng)穩(wěn)定,且參數(shù)很快收斂。圖3為ESO的BTT飛行器解耦控制系統(tǒng)框圖。
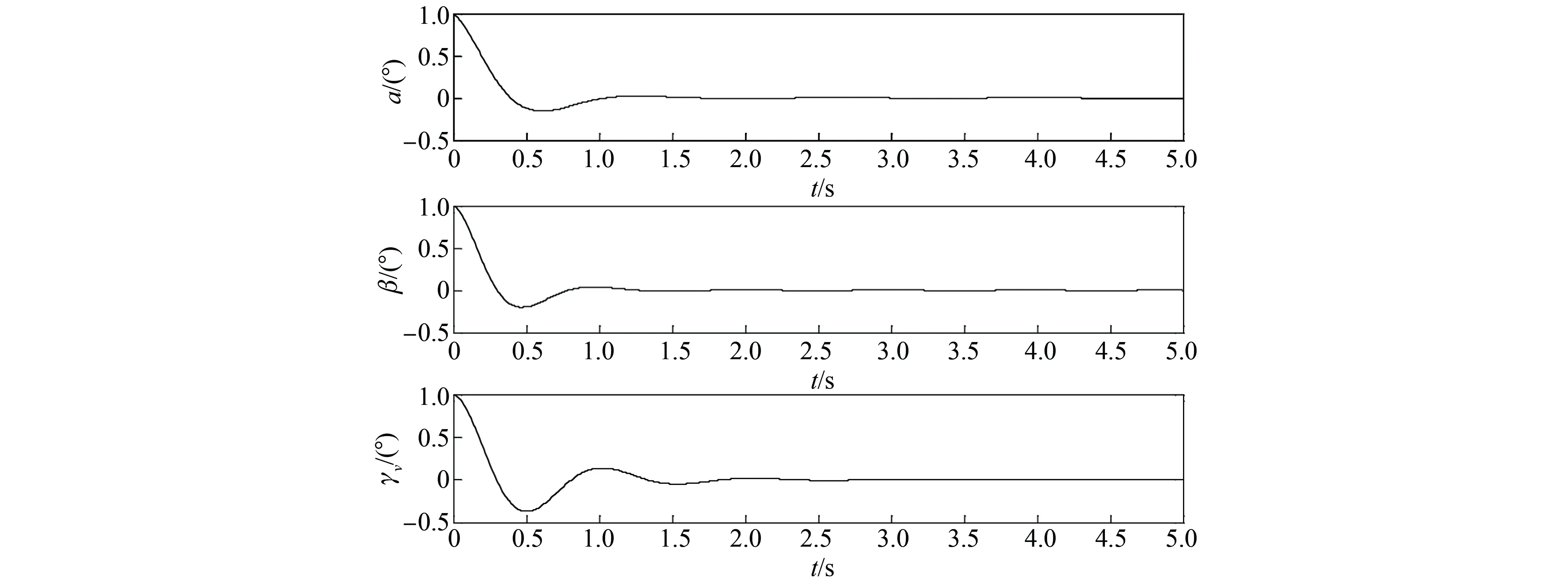
圖2 獨(dú)立三通道狀態(tài)的零輸入響應(yīng)曲線Fig.2 Zero input response curve of the independent three-channel state
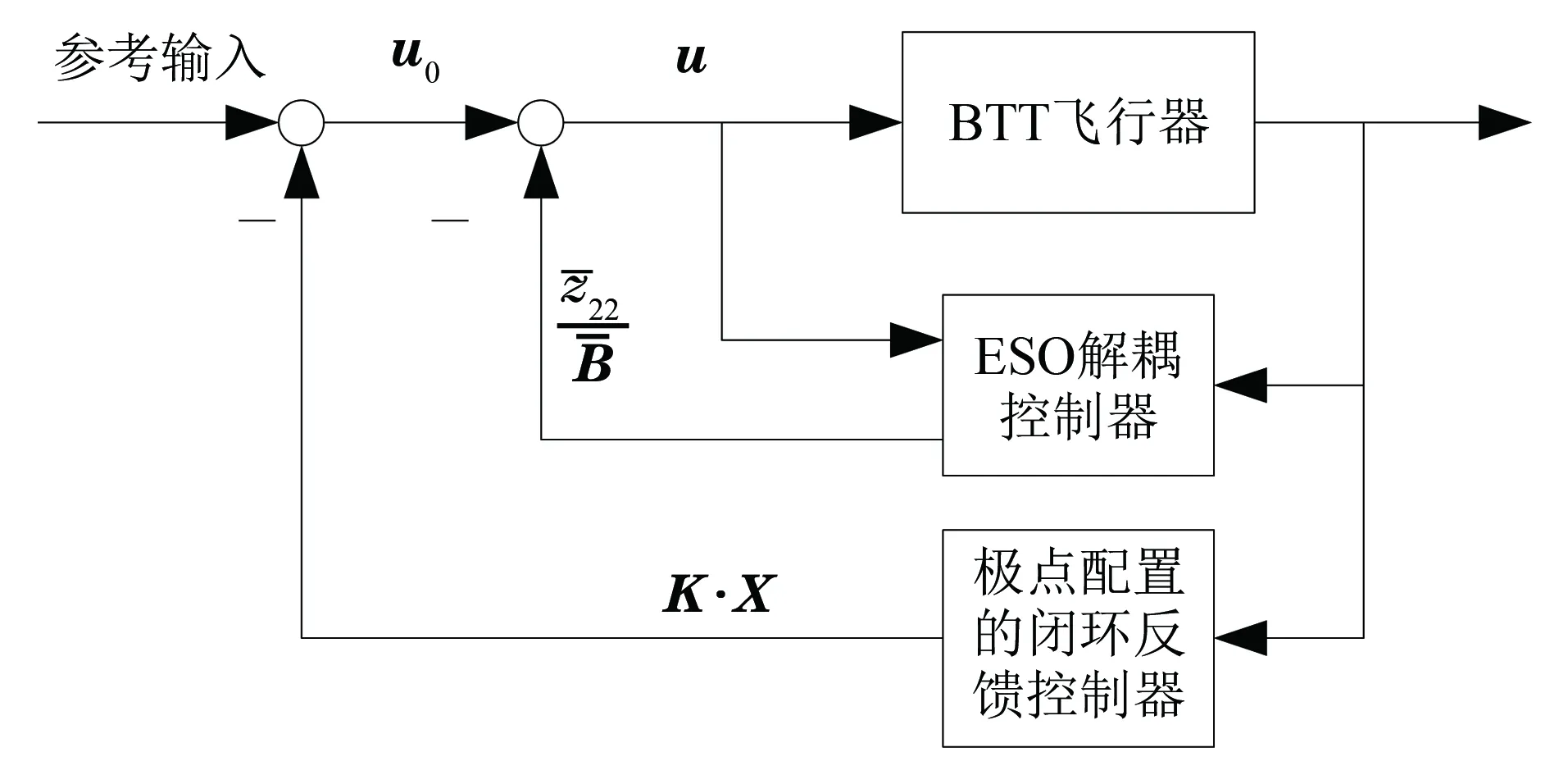
圖3 基于ESO的BTT飛行器解耦控制系統(tǒng)框圖Fig.3 Block diagram of decoupling control system for BTT aircraft based on ESO
3 仿真校驗(yàn)
基于MATLAB仿真分析BTT飛行器多變量耦合控制器,驗(yàn)證系統(tǒng)的解耦特性和控制系統(tǒng)性能。
3.1 仿真參數(shù)
選取BTT飛行器空域中的某特征點(diǎn),其中飛行器質(zhì)量、特征面積、特征長度、轉(zhuǎn)動(dòng)慣量參數(shù)均為已知,則飛行器的模型參數(shù)均為已知參數(shù)。
根據(jù)BTT飛行器控制要求,攻角初值取α0=0°,控制目標(biāo)αcx=5°;側(cè)滑角初值取β0=1°,控制目標(biāo)βcx=0°;傾側(cè)角初值取γv0=0°,控制目標(biāo)γvcx=5°。
ESO參數(shù)設(shè)計(jì)如下
(15)
極點(diǎn)配置的三通道反饋控制參數(shù)如下
(16)
3.2 仿真結(jié)果
仿真周期為10 s,分別對(duì)極點(diǎn)配置方法設(shè)計(jì)的三通道獨(dú)立控制器和ESO解耦控制器進(jìn)行仿真對(duì)比,指令跟蹤結(jié)果如圖4~6所示。ESO對(duì)三通道耦合干擾的估計(jì)曲線如圖7~9所示。
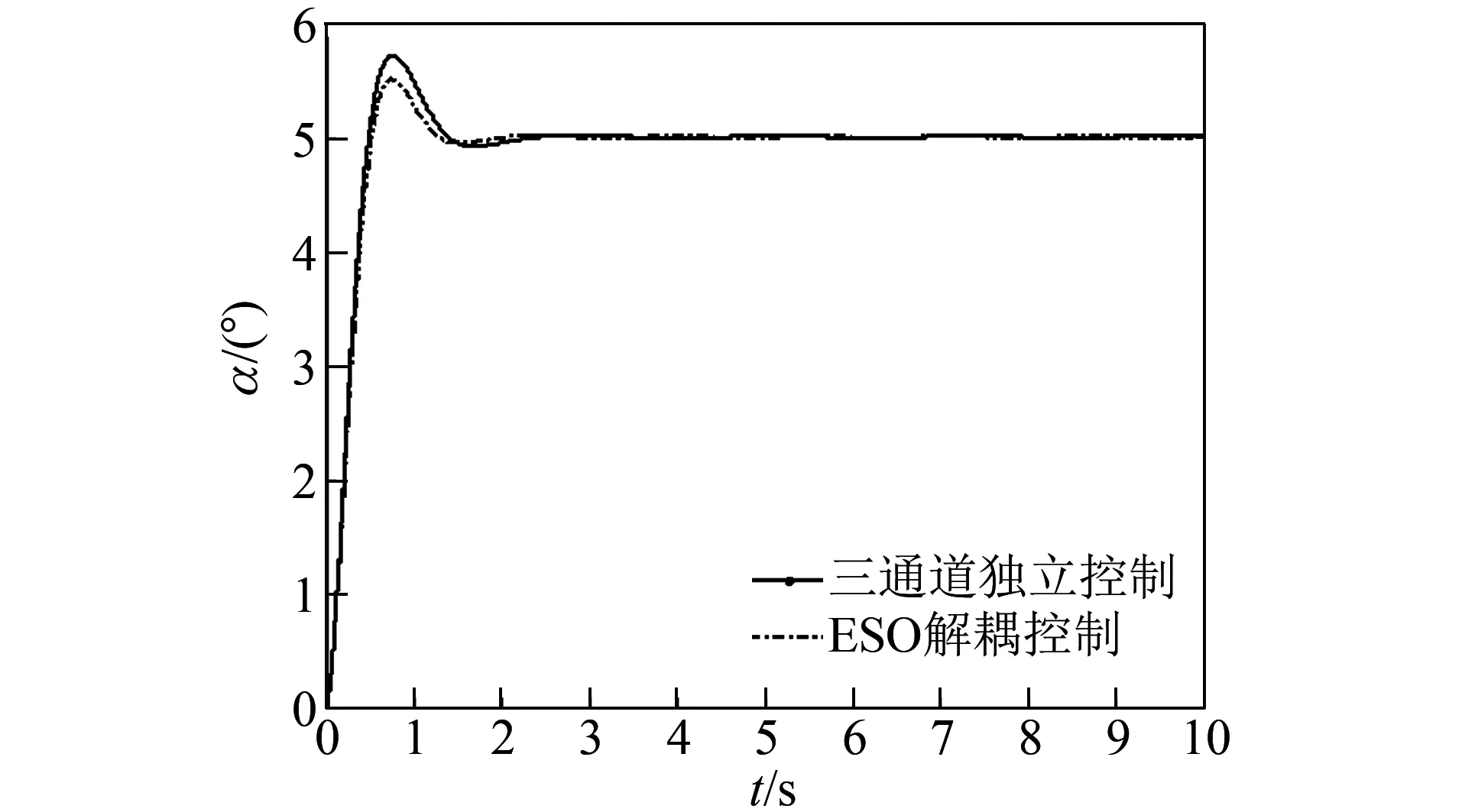
圖4 攻角跟蹤曲線Fig.4 Attack angle tracking curve
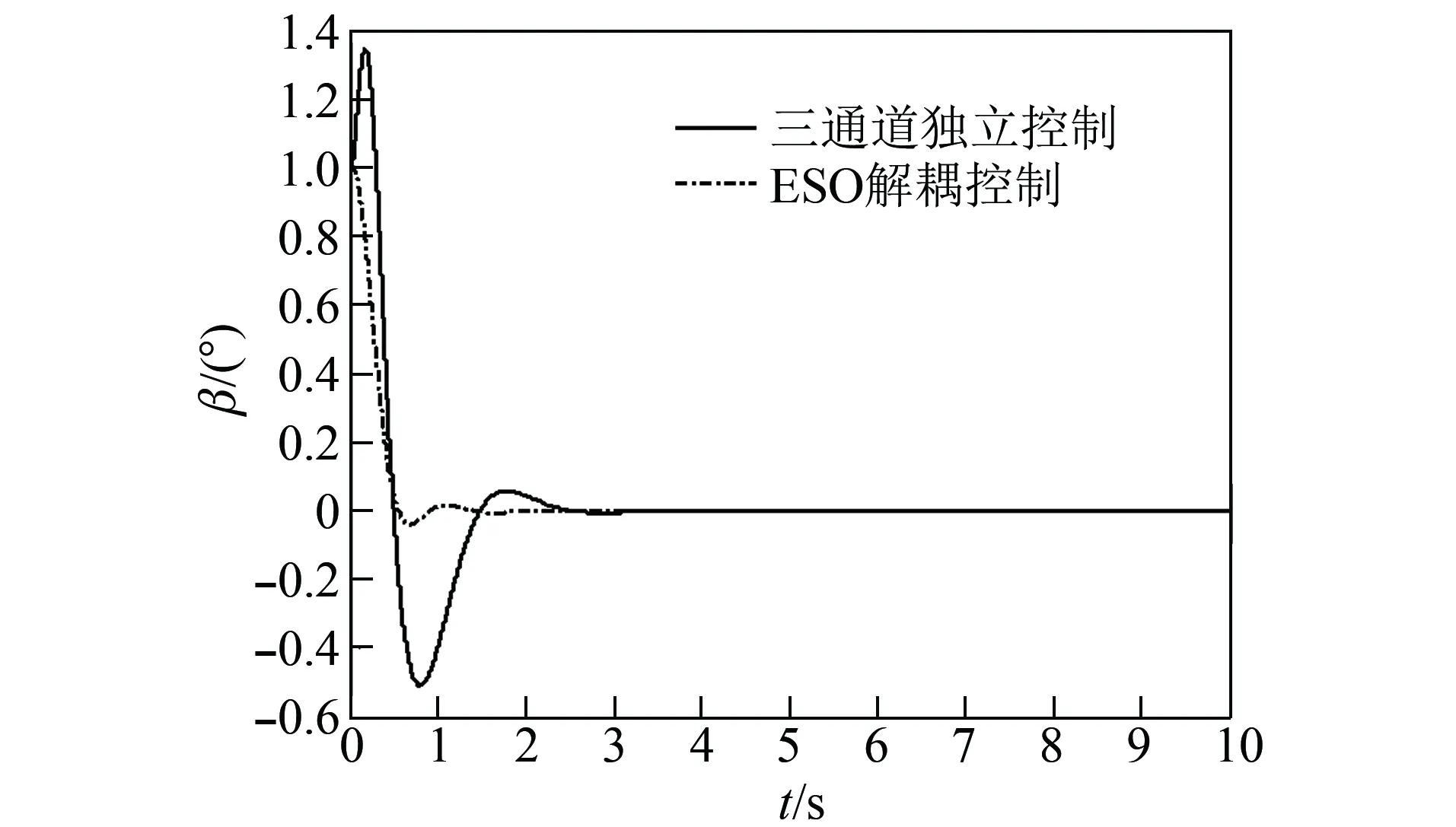
圖5 側(cè)滑角跟蹤曲線Fig.5 Sideslip angle tracking curve
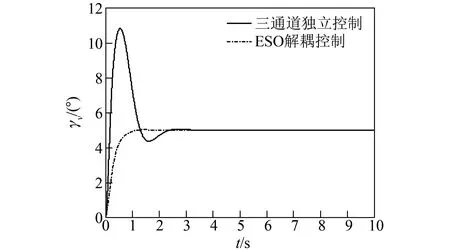
圖6 傾側(cè)角跟蹤曲線Fig.6 Heeling angle tracking curve
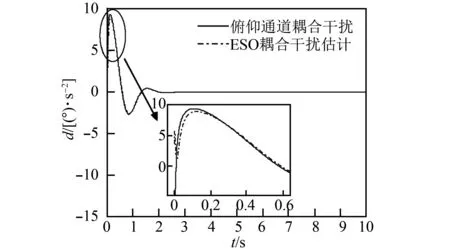
圖7 俯仰通道的ESO耦合干擾估計(jì)曲線Fig.7 ESO coupling interference estimation curve of pitching channel
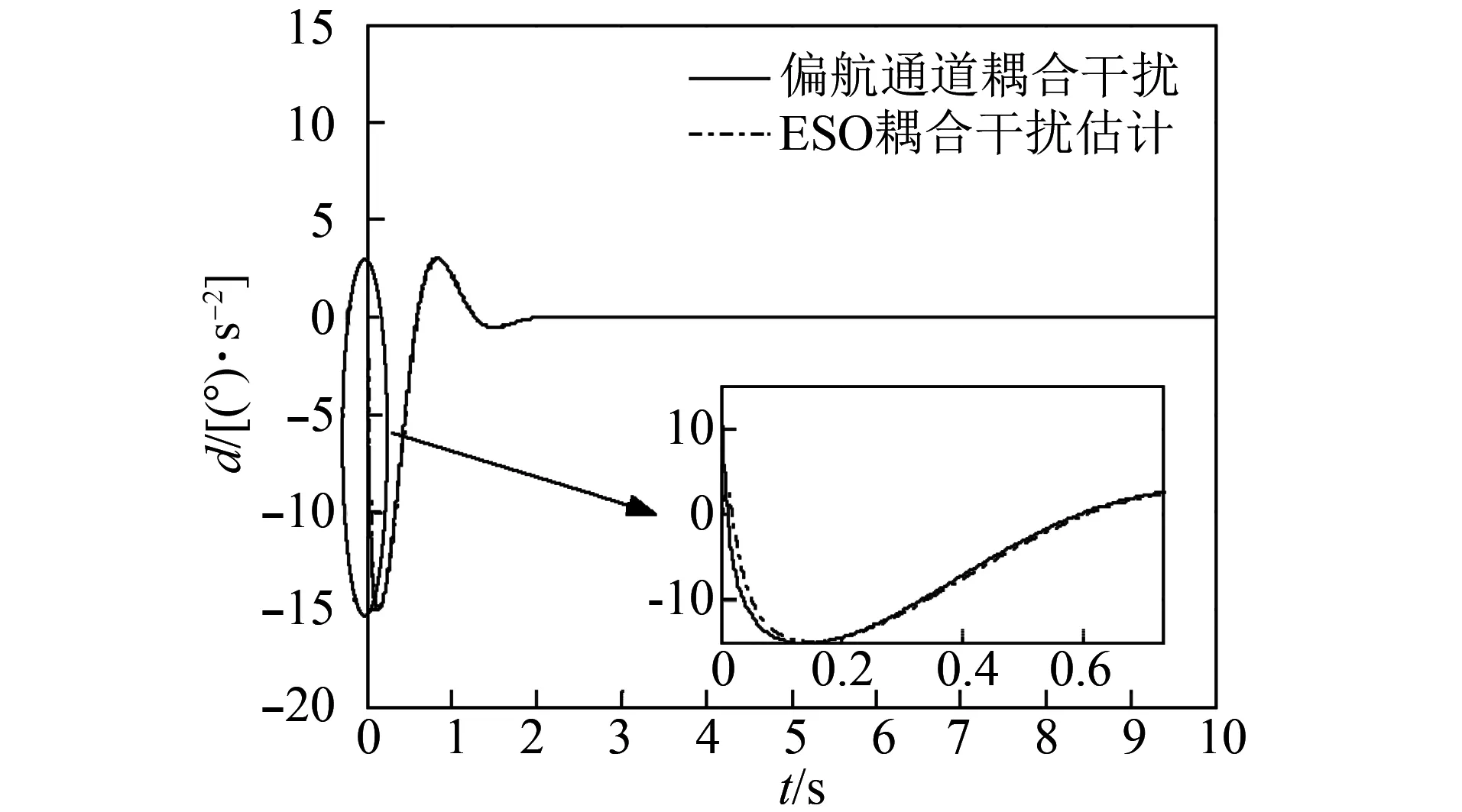
圖8 偏航通道的ESO耦合干擾估計(jì)曲線Fig.8 ESO coupling interference estimation curve of yaw channel
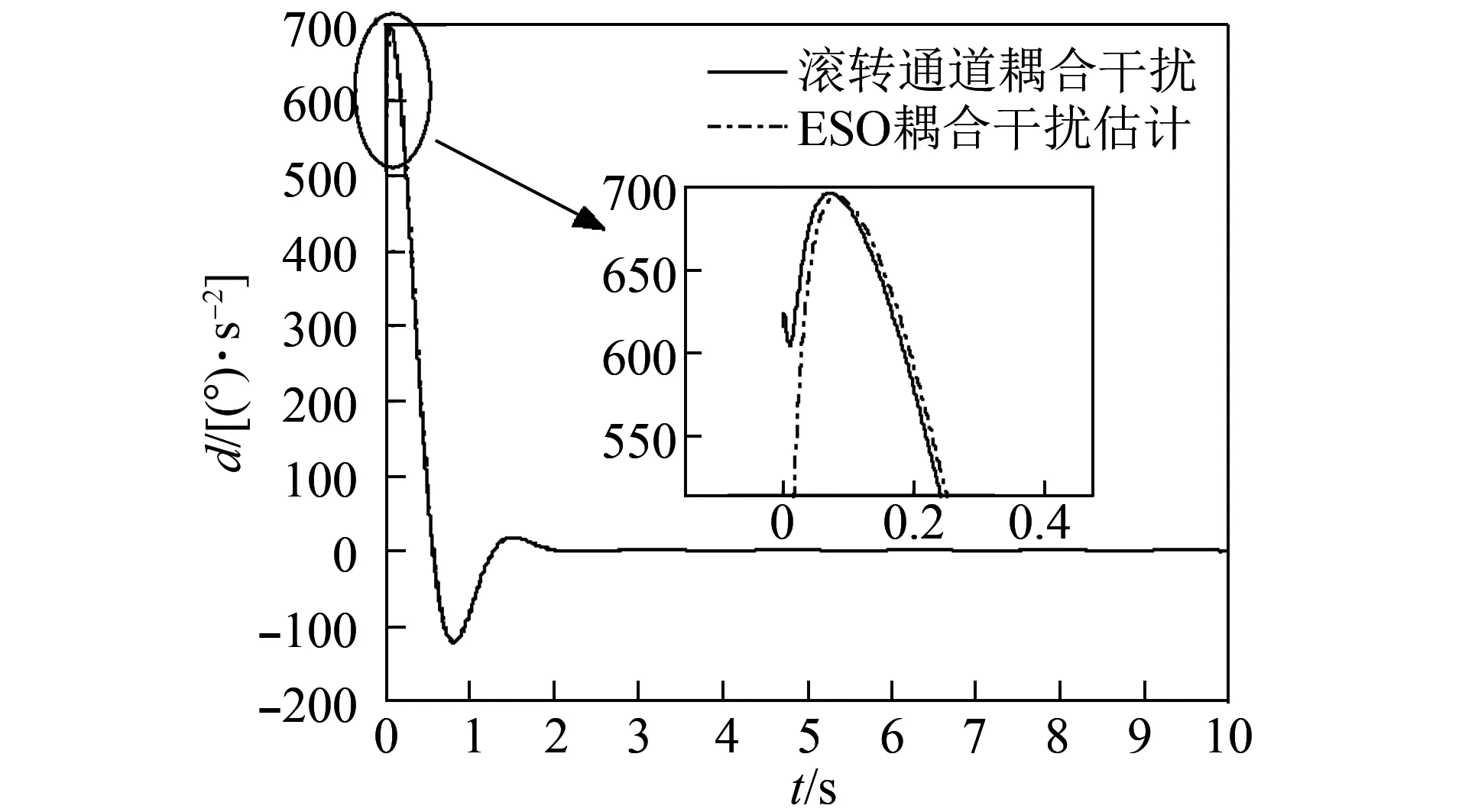
圖9 滾轉(zhuǎn)通道的ESO耦合干擾估計(jì)曲線Fig.9 ESO coupling interference estimation curve of rolling channel
3.3 仿真結(jié)果分析
1) 控制性能分析
圖4~圖6分別為攻角、側(cè)滑角和傾側(cè)角的跟蹤曲線,當(dāng)初始側(cè)滑角不為零時(shí),ESO解耦控制方法可使三通道輸出平穩(wěn)、快速、較小的超調(diào)跟蹤指令信號(hào)。通過兩種方法對(duì)比曲線可以看出,三通道獨(dú)立控制方法跟蹤性能較差,充分體現(xiàn)出ESO解耦控制方法的性能優(yōu)勢。
2) 解耦性分析
通過圖4~圖6可看出,三通道獨(dú)立控制中偏航通道和滾轉(zhuǎn)通道交連耦合嚴(yán)重,偏航通道的側(cè)滑角最大值約0.5°,超調(diào)約40%;滾轉(zhuǎn)通道最大值約11°,超調(diào)大于100%;俯仰通道受耦合影響較小。加入ESO解耦控制,耦合補(bǔ)償可大大降低耦合影響,俯仰通道最大值有所降低;偏航通道最大值約為0.02°,超調(diào)小于2%;滾轉(zhuǎn)通道不受超調(diào)影響。由此說明該方法可有效實(shí)現(xiàn)解耦控制。
3) ESO的觀測性能分析
圖7~圖9分別為ESO對(duì)三通道耦合干擾的估計(jì)曲線,由圖可知,ESO可較為精確地估計(jì)出耦合項(xiàng)干擾信號(hào)值,干擾信號(hào)值隨耦合項(xiàng)值的變化而實(shí)時(shí)改變,這得益于ESO這種精準(zhǔn)的耦合干擾跟蹤。補(bǔ)償可減少耦合影響,達(dá)到解耦的目的。此外,ESO參數(shù)取值大即提高觀測器的帶寬,可提高一定觀測精度,但觀測器帶寬的增加會(huì)引入高頻噪聲,嚴(yán)重影響系統(tǒng)性能,故ESO參數(shù)即β01、β02取值要折中考慮。
通過控制設(shè)計(jì)和仿真分析,本文解耦控制方法由兩部分組成,一個(gè)是極點(diǎn)配置的狀態(tài)反饋控制,它主要影響系統(tǒng)的動(dòng)態(tài)性能和穩(wěn)定性;另一個(gè)是基于ESO的補(bǔ)償控制,它對(duì)耦合進(jìn)行估計(jì)和補(bǔ)償,主要影響系統(tǒng)的解耦性能,當(dāng)兩個(gè)控制方法協(xié)調(diào)匹配時(shí)控制效果最佳。從上述分析可知,本文設(shè)計(jì)驗(yàn)證了基于ESO的多變量控制方法的正確性和有效性。
4 結(jié)束語
本文研究了基于ESO的BTT飛行器姿態(tài)控制系統(tǒng)的多變量解耦控制問題。BTT飛行器中側(cè)滑角不為零,飛行器控制系統(tǒng)三通道交連耦合嚴(yán)重。為解決此問題,用反饋機(jī)制建立能觀測耦合擾動(dòng)作用的ESO,而它不依賴生成耦合擾動(dòng)的具體數(shù)學(xué)模型,也無須直接測量其作用;利用已知設(shè)計(jì)控制器模型參數(shù)即可設(shè)計(jì)出擴(kuò)張狀態(tài)觀測器,而不需要其他模型量。實(shí)現(xiàn)對(duì)耦合擾動(dòng)的估計(jì)并對(duì)其進(jìn)行補(bǔ)償,進(jìn)一步設(shè)計(jì)獨(dú)立三通極點(diǎn)配置的閉環(huán)反饋控制器,完成多變量的解耦控制,是一種通用而實(shí)用的有效方法。通過數(shù)學(xué)仿真驗(yàn)證了所設(shè)計(jì)的多變量解耦控制方法的正確性和有效性,為BTT飛行器多變量解耦控制提供一種新思路,此方法可用于解決飛機(jī)、航天飛機(jī)、BTT導(dǎo)彈及高超聲速飛行器等面對(duì)稱的耦合姿態(tài)控制問題,具有一定的工程實(shí)用價(jià)值。此方法未考慮參數(shù)攝動(dòng)的魯棒性問題和參數(shù)變化的快時(shí)變問題,以及量測噪聲的影響,后續(xù)將進(jìn)一步研究和討論。
[1] 葉振信, 傅維賢, 王萬軍, 等. 戰(zhàn)術(shù)導(dǎo)彈BTT控制技術(shù)發(fā)展綜述[J]. 航天控制, 2009, 27(5): 106-110.
[2] 張靖男, 趙興鋒, 鄭志強(qiáng). BTT導(dǎo)彈的發(fā)展現(xiàn)狀與趨勢[J]. 飛航導(dǎo)彈, 2006(10): 37-39.
[3] 王凌艷, 呂鳴, 孫未蒙, 等. BTT導(dǎo)彈的解耦問題綜述[J]. 飛航導(dǎo)彈, 2009(6): 60-64.
[4] LEE C H, CHUNG M J. Gain scheduled state feedback control design technique for flight vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37(1): 173-182.
[5] 童春霞, 王正杰, 張?zhí)鞓? BTT導(dǎo)彈的變結(jié)構(gòu)解耦控制系統(tǒng)設(shè)計(jì)[J]. 宇航學(xué)報(bào), 2006, 27(1): 27-30.
[6] 張艷, 段朝陽, 張平, 等. 基于動(dòng)態(tài)逆的BTT導(dǎo)彈自動(dòng)駕駛儀設(shè)計(jì)[J]. 北京航空航天大學(xué)學(xué)報(bào), 2007, 33(4): 422-426.
[7] 韓京清. 自抗擾控制技術(shù)[M]. 北京: 國防工業(yè)出版社, 2009.
[8] CASTANEDA L A, LUVIANO-JUAREZ A, CHAIREZ I. Robust trajectory tracking of a Delta robot through adaptive active disturbance rejection control[J]. IEEE Transactions on Control Systems Technology, 2015, 23(4): 1387-1398.
[9] ZHENG Q, GAO L Q, GAO Z Q. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics[C]∥Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, LA, USA, 2007: 3501-3506.
[10] ZHU Z, XU D, LIU J, et al. Missile guidance law based on extended state observer[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5882-5891.
[11] GUO B Z, ZHAO Z L. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems & Control Letters, 2011, 60(6): 420-430.
[12] ZHENG Q, GAO L Q, GAO Z Q. On validation of extended state observer through analysis and experimentation[J]. Journal of Dynamic Systems, Measurement, and Control, 2012, 134(2): 024505.
[13] 杜立夫, 黃萬偉, 楊廣慧, 等. 基于補(bǔ)償方法的高超聲速滑翔飛行器多變量輸出解耦控制[J]. 航天控制, 2015, 33(4): 40-45.
[14] 胡壽松. 自動(dòng)控制原理[M]. 北京: 科學(xué)出版社, 2008.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34