
基于可見光通信和數字圖像處理的車輛智能防撞系統
2018-03-24 09:36:24魏丹賈子彥
物聯網技術 2018年3期
魏丹 賈子彥
摘 要:文中設計了一種將可見光通信技術和數字圖像處理技術相結合的車輛智能防撞系統。該系統主要作用于前后跟車行駛的兩車之間,可實時監控兩車之間的相對運行狀態,當系統發現兩車之間可能發生碰撞時,及時提醒駕駛人或采取自動制動措施,防止碰撞等危險發生。
關鍵詞:可見光通信;數字圖像處理;智能;防撞
中圖分類號:TP39;U461.91 文獻標識碼:A 文章編號:2095-1302(2018)03-0-04
0 引 言
家庭汽車逐步成為我們日常生活中必不可少的交通工具之一,家庭汽車數量激增所帶來的道路交通壓力和道路交通安全隱患值得我們特別重視。為了進一步保障道路交通安全,除了要制定更加合理的道路交通安全規章制度、規范駕駛人的駕駛行為以外,如何進一步提高車輛本身的安全性能也是近年來研究的重要方向。隨著車輛智能化技術的發展,可以通過車輛的智能系統實時監測前方路況,及時發現危險并采取相應措施,以有效避免碰撞危險的發生,提高車輛的安全性能。
1 車輛智能防撞系統的設計
本文所設計的車輛智能防撞系統將數字圖像處理技術與可見光通信技術相結合,使車輛具有車間通信以及前方路況探測的功能,從而實現對前方路況信息的判別,并能夠及時采取警示處理措施以防車輛發生追尾碰撞事故。
本文中可見光通信技術主要運用于車輛之間,以可見光通信的方式實現車間通信。目前,車輛正在使用的剎車燈和車尾示寬燈可經簡單的電路改造成為可見光信號的發送端。車輛的速度和加速度等信息可以通過相應的傳感器獲得并傳遞給改造后的剎車尾燈和車尾示寬燈,車燈可以通過亮滅變化將該車的速度和加速度以可見光信號的形式發送出去。
車輛前端安裝一個高速攝像機,高幀率地實時記錄前方路況信息,以此完成系統信息的采集。系統再利用數字圖像處理技術對高速攝像機記錄下來的連續多幀圖像進行處理分析,提取到前車發送的可見光信號;通過視覺圖像中的目標物測距過程可獲得前車的相對位置信息。
智能防撞系統的判別決策模塊將獲得的相對車速、車距信息代入安全距離模型,將實時跟車距離與對應運行狀態下的安全距離進行比較。當實時跟車距離小于對應的安全距離時,判別決策模塊將發出信號給執行模塊,執行模塊中的聲光報警器動作,警示駕駛員;當實時跟車距離小于一級臨界安全距離時,執行模塊在對駕駛員進行聲光報警的同時,采取相應的自動制動措施。從而保證車輛能夠在危險發生前及時采取措施,防止跟車行駛過程中碰撞事故的發生。圖1所示為車輛智能防撞系統的工作流程。
2 車輛智能防撞系統的系統組成
本文所設計的車輛智能防撞系統主要由信息采集模塊、數據信息處理模塊、判別決策模塊和響應執行模塊組成。系統組成框圖如圖2所示。
2.1 信息采集模塊
信息采集模塊主要通過安裝于車輛前端的高速攝像機對前方視野進行拍攝獲得實時記錄的連續多幀圖像。實時記錄的連續多幀圖像主要包括正常跟車行駛過程中前車在本車前方視野中的圖景。所采集到的連續多幀圖像中所包含的信息包括前車尾部示寬燈或剎車尾燈發送的可見光信號及前車與本車相對距離信息。可見光信號包含前車的速度和加速度信息。
2.2 數據信息處理模塊
數據信息處理模塊主要通過數字圖像處理技術對信息采集模塊所采集的連續多幀圖像進行處理,經圖像的幀間差法、圖像區域劃分等過程提取可見光信號并獲得車輛間距信息。可進一步對提取到的可見光信號進行解碼,獲得相應的前車速度和加速度等運行狀態信息。
2.3 判別決策模塊
判別決策模塊根據數據信息處理模塊獲得的信息,判斷本車是否有追尾的可能。當警示判別模塊認為本車可能與前車發生追尾碰撞危險時,判別決策模塊將給予執行模塊相應的警示執行信息。
2.4 響應執行模塊
執行模塊根據警示判別模塊發送的警示執行信息,對本車內的聲光報警器或剎車進行相應的動作,及時警示駕駛員并在必要時自動制動以防本車與前車發生追尾碰撞。
3 基于數字圖像處理的車輛識別通信和距離測算
3.1 基于車尾燈的車輛識別
(1)基于剎車尾燈的車輛識別利用了剎車尾燈的紅色特性。利用數字圖像處理技術可以將讀入的RGB模型圖像轉換為HSV模型圖像,H,S,V分別代表色彩的飽和度、色調和明度,將剎車尾燈的紅色特征進行圖像分割時,可以通過設置合適的H,S分量閾值,識別剎車尾燈區域[1]。圖3所示為系統采集讀入的RGB圖像,圖4所示為對應轉換的HSV圖像。
將S分量二值模板作用于H分量圖像,比閾值大的像素點值被賦值為1(白),小于或等于閾值的像素點值被賦值為0(黑)。根據紅色在HSV顏色空間的分布規律,本文選取的分量閾值范圍為:
0.45 0° 其中H分量的角度取值范圍根據HSV模型周角360°可換算成歸一化的取值范圍: 0 剎車尾燈分割并標記識別圖如圖5所示,由圖可知,利用此方法可以基本識別出剎車尾燈區域,并將剎車尾燈區域標記了出來。 (2)基于車尾示寬燈的車輛識別利用了車尾示寬燈的亮度特征。采用LED光源的車尾示寬燈作為一種不以照明為目的的輔助提示燈具,燈光分散,亮度特征明顯。目前,大多數汽車的車尾示寬燈所使用的燈泡仍為鹵素燈泡,采用LED光源的車尾示寬燈還未大量普及。因此,本文先對同樣采用LED光源的日間行車燈進行實驗驗證。 HSV空間下的V分量圖像無圖像的色彩信息,每個像素點的值表示該像素點的明亮程度。燈亮時,燈在圖像上的V分量值范圍約為: 0.9
通過實驗對比發現,直接通過V分量取值范圍獲取的二值圖像的效果不如以V分量的值作為圖像分割的閾值分割圖像轉換為二值圖像好。本文選定作為二值化圖像閾值的V分量值為0.95。對初步分割出的二值圖像作進一步的形態學處理,可以有效地標記出車燈位置。
3.2 車間通信的實現
本文實現車間通信的方法是后車系統利用數字圖像處理技術對高速攝像機采集的圖像信息進行分析,提取出可見光信號,進而解碼獲悉前車的運行狀態信息。
本文就該部分內容進行了實驗環境下的驗證。將LED燈的信號接口通過串口線與PC機相連,打開PC機上的串口助手,設置串口助手以波特率為300的速率定時發送十六進制字符串‘AA,‘AA對應的二進制位編碼為‘10101010。該串口助手發送的數據格式為8位數據位和1位標志位,且標志位為‘0。設置高速攝像機的幀率為1 500 fps,即五倍的采樣頻率以確保信息能被有效采集。
待高速攝像機完成圖像信息的采集后,利用數字圖像處理技術對采集到的連續多幀圖像進行處理,主要通過幀間差法提取到LED燈亮、滅分別對應的編碼信息。本文利用Matlab軟件強大的計算分析性能及其圖像處理工作箱進行相應的圖像處理[2]。
圖6所示為Matlab環境中提取到的LED燈以可見光信號發出的數據部分的編碼。第一個編碼出錯是由于采樣圖像其實部分的隨機性,將數據分布的狀態翻轉當成了標志位處的狀態翻轉。對后面提取到的編碼予以糾正。編碼‘10101010對應的十六進制字符串正是發送的‘AA。
3.3 車輛間距測算
前后兩車之間的距離信息也是攝像機采集的前方路況圖像中所包含的重要信息之一。通過數字圖像處理技術獲悉的兩車之間距離信息是防止前后兩車發生碰撞的重要依據之一。
本文采用了單目視覺下的單幀靜態圖像測距法對車輛間距進行測算[3]。圖7所示為沿車輛行駛方向的單幀靜態圖像測距原理圖。
其中:f表示攝像機的有效焦距,?表示攝像機的仰俯角,h表示攝像機的安裝高度,坐標(x0,y0)所表示的點為圖像物理坐標系的原點,即攝像機光軸與成像平面的交點。點P為前方車輛尾部在路面上的垂直投影位置,P點投影在成像平面上,圖像上的投影點在圖像物理坐標系中的坐標為(x,y)。
本文對該部分進行了仿真實驗。通過實際測量獲得攝像機的外部參數?和h,通過攝像機標定獲得攝像機的內部參數f和光心坐標(x0,y0)。本文采用張正友標定法并利用Matlab的應用工具Camera Calibrator對攝像機進行標定[4]。圖8所示為用于攝像機標定的不同角度的標定板。圖9所示為攝像機標定完成后獲得的攝像機內部參數。
即fx=3 453.4,fy=3 453.3,x0=1 543.8,y0=2 128.6。將攝像機的內外參數以及圖像中所測點的像素坐標代入測距公式,即可測算出對應的實際距離。實驗結果見表1所列。
實驗結果表明,通過圖像中點的位置以及相關攝像機內部參數可以有效測算出圖像中的點在實際空間中對應的實際距離。但距離測算的誤差會隨著距離的增大而顯著提高。
4 車輛智能防撞決策
通過上述車輛的識別、通信、測距過程,可以獲悉本車與前車的相對速度和相對距離等信息。本文建立了一個車輛智能防撞數學模型,利用車輛間的相對速度和相對距離信息,通過該數學模型及時做出危險判別并給出預警信號,使車輛能夠及時采取措施,防止追尾碰撞危險的發生。
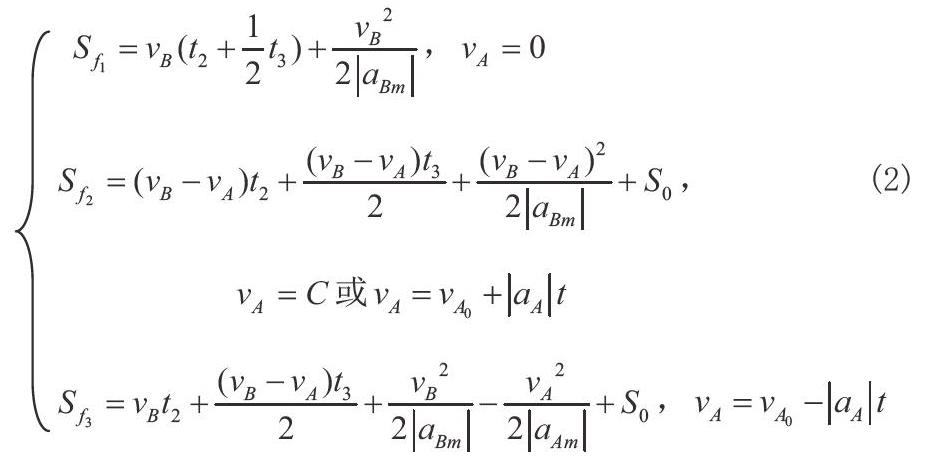
本文采用的行車安全距離模型建立在對車輛的減速制動過程分析上。根據前車運行狀態的不同,安全距離模型的表達式也有所不同。主要分為前車停止,前車勻速或加速運動,前車減速或減速停止運動等三種情況[5]。安全車距模型為:
其中:Sf1,Sf2,Sf3分別為三種情況下的臨界安全距離,vB,vA分別為前車和本車的實時車速,|aAm|,|aBm|分別為前車和本車的最大制動減速度絕對值,S0為危險解除時兩車的最近跟車距離。
將通過制動過程分析獲得的臨界安全距離Sf作為一級安全距離D1,在此基礎上加上設定的警示距離S*得到二級預警距離D2。根據相關參考文獻調查,給駕駛員預留1 s的時間可避免90%的交通事故的發生[6]。又因交通法規定車輛在高速公路上的最高時速為120 km/h,即33.3 m/s,因而本文設定S*為45 m。圖10所示為車輛智能防撞系統的防撞決策流程。
兩車之間的實時跟車距離為DRT,結合一級預警距離D1和二級預警距離D2進行車輛防撞決策:
(1)若車輛間距DRT小于或等于臨界安全距離D1,則啟動車輛自動制動子程序和聲光報警子程序,利用車輛自動制動系統使車輛立即制動減速的同時通過車內的聲光器件對駕駛員報警。
(2)若車輛間距DRT介于D1與D2之間,則只啟動聲光報警子程序使聲光報警器動作,通過聲光報警的方式提醒駕駛員減速慢行。
(3)若車輛間距DRT大于二級預警距離D2,則說明兩車之間的跟車距離較大,不易發生追尾碰撞,此時不做特別處理。
5 結 語
在整個道路交通狀況日漸復雜的今天,車輛智能防撞系統作為一種輔助駕駛智能系統可以有效減少車輛行駛過程中追尾碰撞的發生,具有一定的研究意義和實用價值。本文提出的基于數字圖像處理的車輛智能防撞系統,將可見光通信技術與數字圖像處理技術相結合,充分發揮了可見光通信和數字圖像處理的優勢,在車輛智能防追尾碰撞研究的基礎上提供了一定的探索基礎。但由于個人能力以及當前客觀條件所限,本文提出的系統仍有很多需要改進的地方。例如,本文在圖像算法處理上需進一步改進以提高系統的適應性和準確性,在安全距離數學模型的選用上需進一步豐富以適應復雜路況的需求等。
參考文獻
[1]高飛. Matlab圖像處理375例[M].北京:人民郵電出版社,2015.
[2]趙小川.現代數字圖像處理技術提高及應用案例詳解:Matlab版[M].北京:北京航空航天大學出版社,2012.
[3]王亞麗.基于毫米波雷達與機器視覺融合的前方車輛檢測研究[D].長春:吉林大學,2013.
[4]吳慶雙,付仲良,孟慶祥.基于序列圖像的攝像機自標定方法[J].計算機應用,2011,31(11):3010-3014.
[5]許穎,岳大軍,趙洋,等.汽車防追尾系統中安全距離模型的研究[J].農業裝備與車輛工程,2009(2):26-29.
[6]中華人民共和國道路交通管理條例[S].北京:中國法制出版社,2004.
[7]劉正岐,郭濤.對比色配色方案數字化生成技術的研究[J].物聯網技術,2014,4(12):59-60.
[8]程結園,張濤.基于圖像處理的智能車輛系統[J].物聯網技術,2014,4(6):45-47.
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電腦知識與技術(2016年28期)2016-12-21 11:35:19
中國科技博覽(2016年25期)2016-12-20 19:41:38
電子技術與軟件工程(2016年19期)2016-12-19 18:03:34
考試周刊(2016年91期)2016-12-08 22:19:28
