翻醅機智能控制系統設計
2018-03-29 05:13:32崔艷海潘天紅
制造業自動化 2018年3期
崔艷海,舒 杰,潘天紅
(江蘇大學 電氣信息工程學院 自動化系,鎮江 212013)
0 引言
隨著我國科技水平的不斷提高,只有將智能控制合理運用到各行各業中才真正能夠體現科學的進步。本項研究的翻醅機智能控制系統使用了多種傳感模塊和數據處理模塊,可以實時的對發酵過程中翻醅機的位置進行數據采集和分析。使用2.4G無線通信模塊和GPRS模塊將所測的數據發送給遠程終端,系統對所得到的數據經過分析,自動調整翻醅工藝參數,經STM32控制器處理后發出命令給驅動電機,從而控制機械臂動作,使得翻醅朝著智能化方向發展。
1 系統總體方案設計
本項目主要是基于STM32F103ZET6單片機最小系統為控制核心構成的翻醅機智能控制系統,系統的總體設計框圖如圖1所示。整個控制系統分為:1)微控制器。系統選用STM32系列高性能微控制器系統的核心控制模塊;2)工業顯示屏模塊。主要用于實現人機之間交互功能;3)接近開關傳感器模塊。主要用于測量目標的實時位置;4)電機驅動模塊。該模塊用于驅動電機旋轉;5)2.4G無線通訊電路。該模塊用于將測得的數據發送到移動設備或者嵌入式系統;6)GPRS模塊。該模塊將數據發送給手機端和服務器端。
系統運行時,STM32單片機運行程序后產生PWM波,經過光電隔離后將脈沖送到電機驅動電路中,驅動電機轉動,接近開關判斷電機是否到達極限位置。同時檢測當前的轉速并反饋給單片機系統,單片機通過PID算法智能調節PWM脈沖占空比,實現電機的平滑穩定的調速。根據工業串口屏的命令來控制電機運作,利用傳感器反饋矯正控制,實現翻醅過程自動化操作[1]。
2 系統硬件電路
智能控制系統的硬件部分由STM32F103ZET6單片機最小系統、電源模塊、電機驅動模塊、接近開關模塊、2.4G通訊模塊、GPRS模塊以及工業串口屏模塊構成。
2.1 STM32最小系統
STM32F103ZET6單片機是整個翻醅機智能控制系統的核心部分。這款單片機是ST公司生產的32位的增強型系列單片機,內核采用Cortex-M3架構,其資源十分豐富:64KB SRAM、512KB FLASH、2個基本定時器、2個DMA控制器(共12個通道)、3個SPI、5個串口、3個12位ADC、1個12位DAC以及112個通用IO口,完全能夠滿足實驗需求。其特點是高性能、低成本、低功耗[2]。主要包括電源電路、時鐘電路、復位電路、啟動電路和程序下載電路。
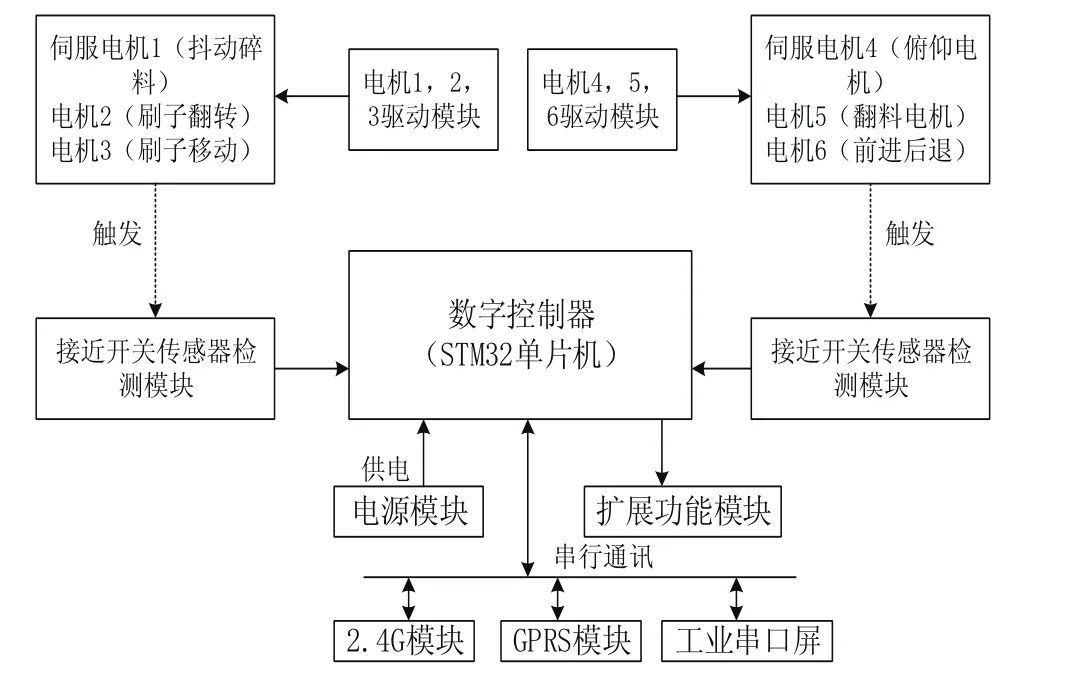
圖1 系統總體設計框圖
2.2 電源模塊
為滿足控制系統各模塊對不同電壓等級電源的需求,本項目設計了三種電壓轉換電路。電源分配示意圖如圖2所示。在圖2中,采用鋰電池作為動力源,采用SYSY20-24S12芯片輸出12V電壓供給工業串口屏使用;采用LM2576-5V芯片輸出5V電壓供給電機驅動模塊使用;由LM2576-3.3V芯片將12V電壓轉換為3.3V,作為主控制器STM32的供電電源。在設計電源電路時,還要考慮提供電源轉換效率,抗干擾等因素等。
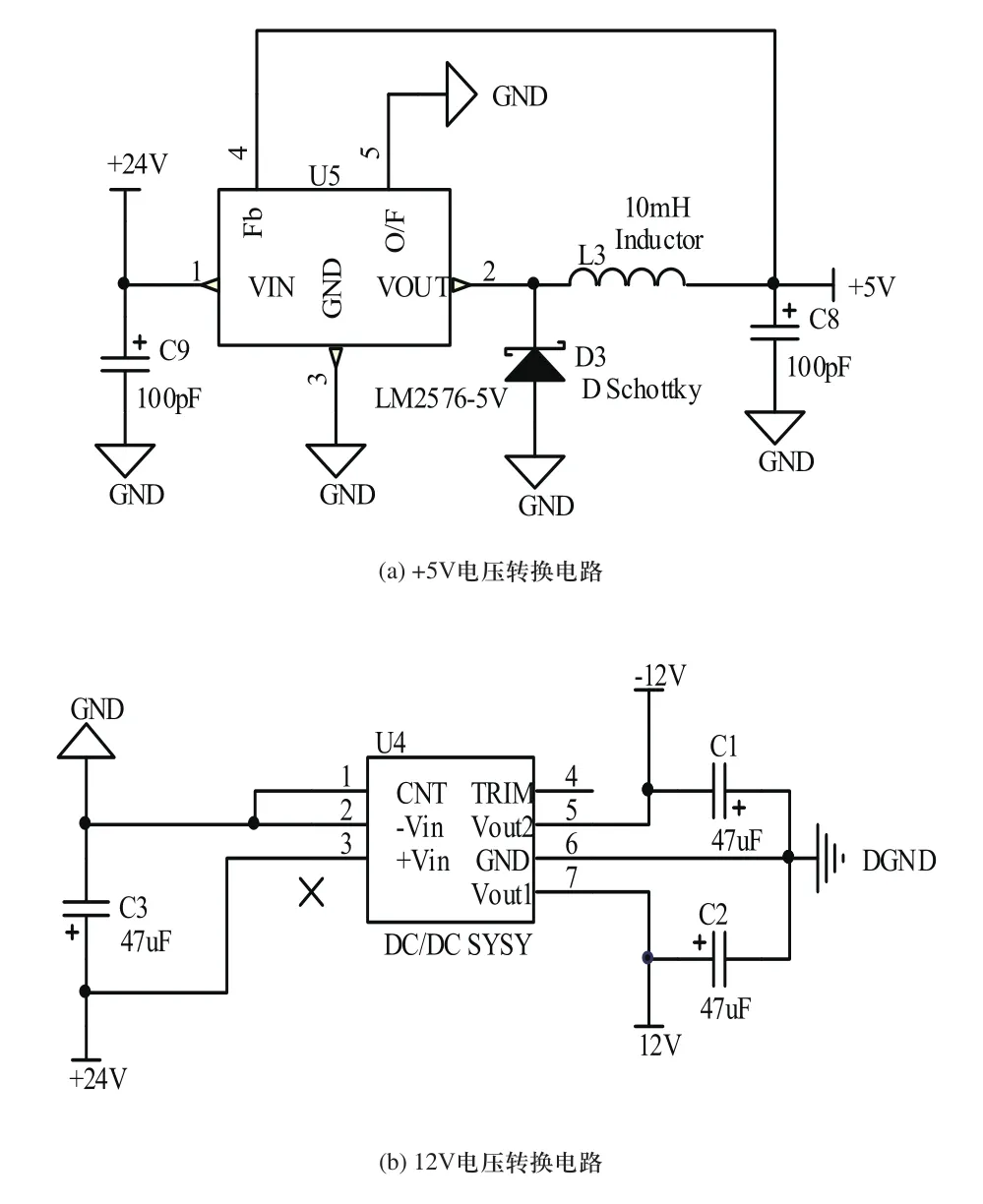
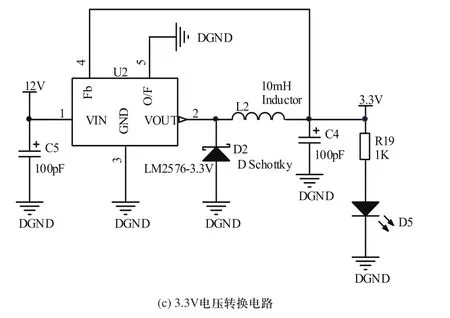
圖2 電源模塊電路
2.3 電機驅動模塊
本次翻醅機系統共有6個電機,采用兩種控制器,一種是BLD-750直流無刷電機驅動器,還有一種是YPC系列大功率無刷電機控制器。無刷直流電機既具有交流電機的簡單、運行可靠、維護方便等優點,又具有直流電機運行效率高、調速性能好的優點,而且由于不受機械換向限制,易于做到大容量、高轉速。因此,本次設計選用無刷直流電機來作為動力裝置,滿足設計的性能需求[3]。
BLD-750直流無刷電機驅動器作為電機的驅動模塊,這款驅動器具備PID電流調節,能夠利用直流無刷電機的霍爾信號,經過放大頻率后進行速度閉環調節,其與單片機的連線電路如圖3(a)所示。
YPC系列大功率無刷電機驅動器,驅動電機的正轉反轉和停止功能必須通過黑線、灰線和棕線的連接來控制,其與單片機的連線電路如圖3(b)所示。
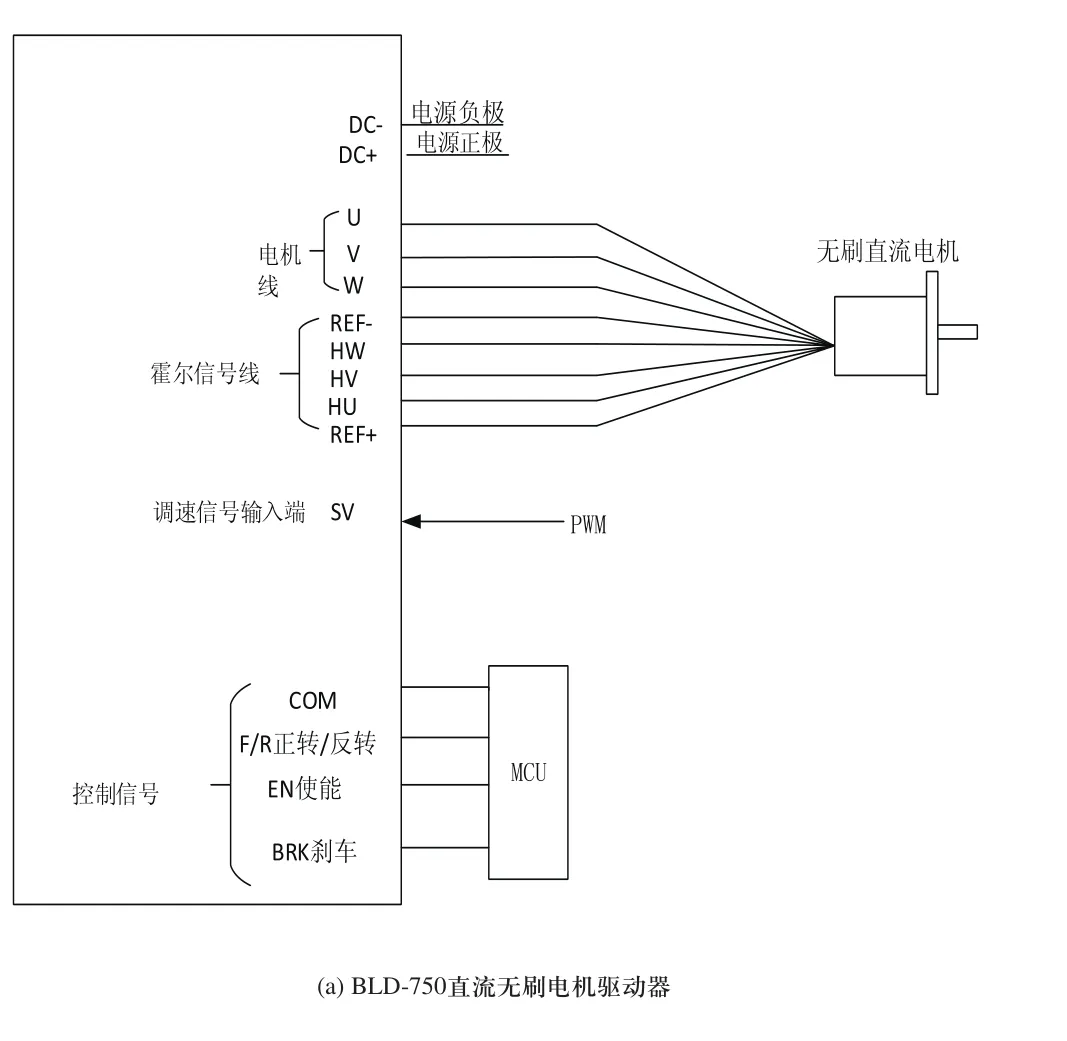
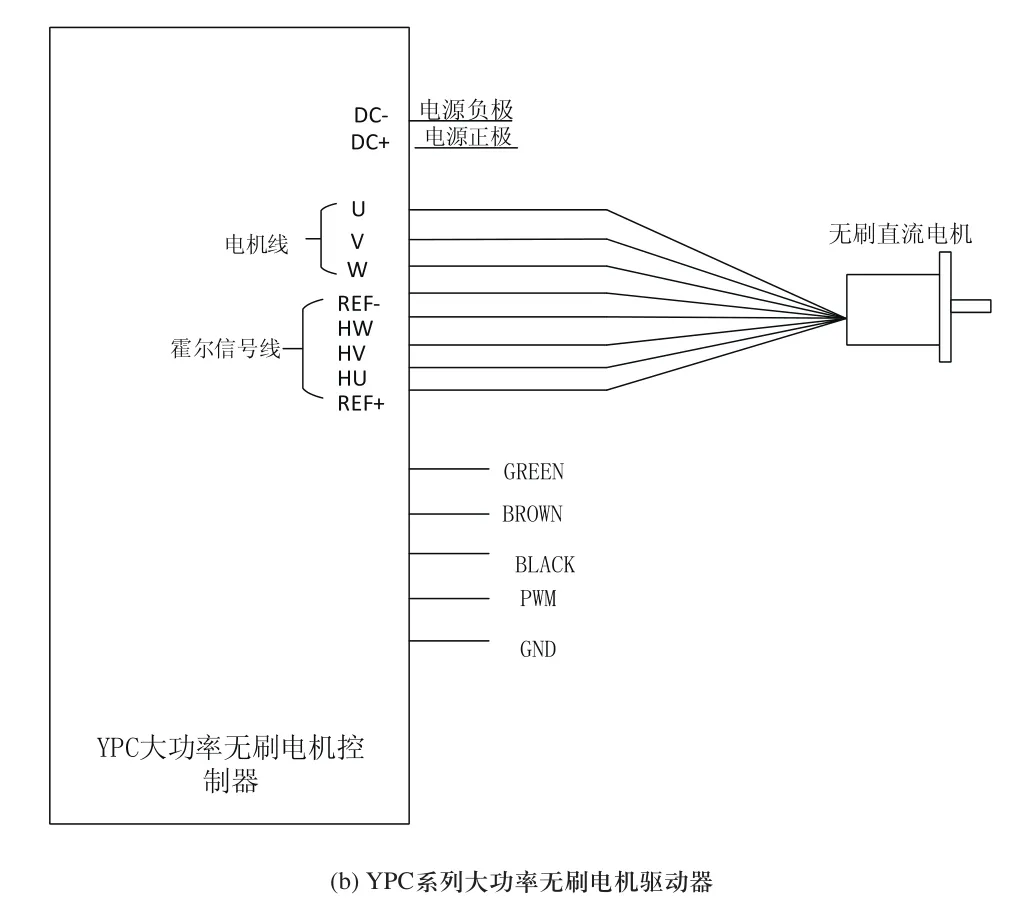
圖3 電機驅動與電機連接圖
2.4 接近開關模塊
接近開關模塊采用LJ12A3-4-Z/BX傳感器作為接近傳感器,這是一種NPN型電感式的接近開關傳感器,主要用于檢測金屬物體,接近開關電路如圖4所示。NPN是指當有信號觸發時,信號輸出線OUT和電源線VCC連接,相當于輸出高電平的電源線[4]。當傳感器檢測到有物體靠近接近開關傳感器時,傳感器的開關閉合,電路導通,發光二極管通電發光,此時光敏三極管導通,PEI輸出低電平。當傳感器未檢測到有物體靠近接近開關傳感器時,傳感器的開關常開,電路不導通,發光二極管不發光,光敏三極管不導通,PEI輸出高電平。
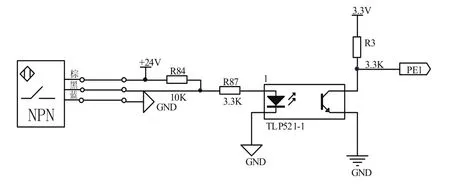
圖4 接近開關模塊
2.5 GPRS模塊
本設計采用了SIMCom公司的SIM900A作為通信芯片,它支持TCP/IP協議。它屬于雙頻GSM/GPRS模塊,完全采用SMT封裝形式,性能穩定,并且能夠滿足用戶的多種需求[5]。具體電路圖如圖5所示。
圖5為SIM900A與STM32連接圖。單片機與SIM900A模塊的連接和控制主要是通過串口進行控制。采用AT指令,可以在系統斷線之后自動重新連接,不需手動連接。在實現斷線自動重連功能時,涉及到DCD、RI兩個引腳的使用。DCD引腳用來實現模數轉換,當模塊掉線時,會給DCD引腳一個高電平,當這個電平被DCD引腳檢測到之后,模塊就是采取相應的動作,來重新連接上線。RI引腳在模塊上線之后,就一直保持高電平,在有電話和短信進來的時候,RI管腳就會有一個低電平出現,當RI引腳檢測到這個低電平的時候,模塊就會采取相應動作,進入到短信或者電話模式。該模塊有兩種工作頻段,可以使用AT編程,能夠實現不同格式的數據收發。
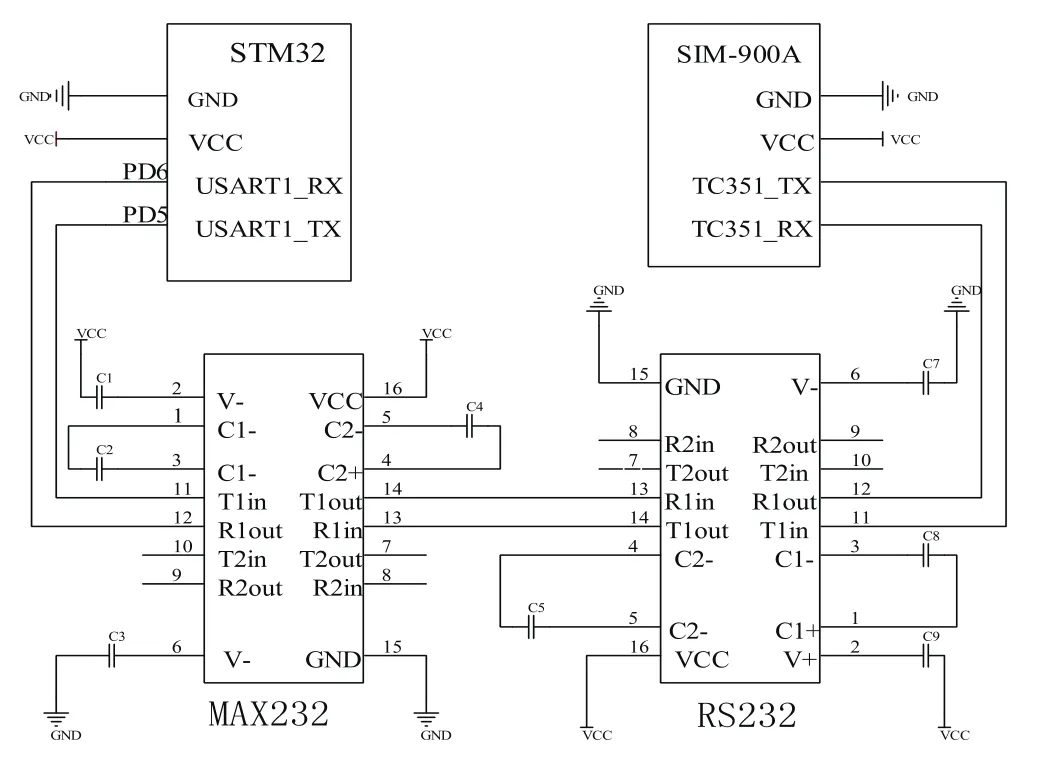
圖5 無線通信模塊電路
2.6 工業串口屏模塊
采用北京迪文的DMT10600T102_02W作為觸摸屏,實現人機之間的交互功能。在設計中,STM32主控制器根據觸摸屏指令實現對生產工藝的設定和測試及運動控制等功能,該屏通過接口電路與STM32串口相連,實現STM32和觸摸屏的數據通信。
3 系統軟件設計
系統軟件部分包括PWM波產生程序、機械翻醅程序設計、機械清洗程序設計、翻醅回零程序設計構成,其系統軟件模塊結構如圖6所示。
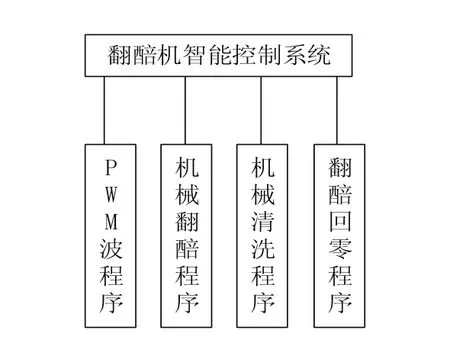
圖6 系統軟件模塊結構圖
該系統使用電機來控制翻醅機進行翻醅工作,其具體工作流程如下:首先啟動命令,俯仰電機下降直到觸發角度接近傳感器四次后停止電機,然后開啟翻醅電機抖動電機并且控制水平點擊向前工作直到觸發水平終端接近傳感器,再然后關閉翻醅電機抖動電機并且水平電機向后工作直到觸發水平終端接近傳感器再關閉水平電機。以上述工作為一個流程改變觸發角度接近傳感器的次數,進行循環,完成整個翻醅工作。
4 結束語
隨著工業自動化進程的發展,中國制造業逐漸轉型升級為智能制造,因此發酵過程中同樣需要智能化、自動化。本系統硬件方面的合理配合使用和軟件方面細心編程都達到了工藝要求。對于整個系統穩定運行打下很好基礎,實現了翻醅過程的自動控制,并且對于不同的階段都實施了監控。本項目基于STM32微控制器設計翻醅機智能控制系統,能夠對發酵過程進行監控,自動調整工藝參數,實現翻醅過程的自動化。該設計易于產品化,具有很大發展空間和市場競爭力。該翻醅機智能控制系統可切實地解決發酵過程中的一些弊端,具有很大的應用前景。
[1]朱瑤迪.鎮江香醋固態發酵參數的智能在線監測及其分布研究[D].江蘇大學,2016.
[2]張志成.基于STM32單片機的函數信號發生器[J].自動化與儀器儀表,2014(2):70-71.
[3]WANG Jianlin,YU Tao,JIN Cuiyun.On-line Estimation of Biomass in Fermentation Process Using Support Vector Machine[J].Chinese J.Chem.Eng,2006,14(3):383-388.
[4]孫長明.淺談基于51系列單片機對PNP型傳感器輸出的電路設計[J].科技創新導報,2013(30):59-59.
[5]霍濤,賈振堂.基于STM32和SIM900A的無線通信模塊設計與實現[J].電子設計工程,2014(17):106-110.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16