電能表自動化檢定系統上、下料單元任務分配策略研究
2018-03-29 07:20:43劉岑岑蔡文嘉
制造業自動化 2018年3期
關鍵詞:系統
劉岑岑,蔡文嘉,庹 璟,夏 天
(國網湖北省電力公司計量中心,武漢 430080)
0 引言
電能表自動化檢定系統是一種新型的計量自動化檢測系統[1],它能自動完成電能表的出庫、運輸、檢定、分揀、回庫等一系列任務,是自動化系統的“出入關口”,其運行速率直接關乎著系統的運行效率。
上下料單元主要承擔電能表由周轉箱[2]至計量托盤或計量托盤至周轉箱的雙向移載的任務。由于電能表從智能立庫輸送出時是盛裝于周轉箱內的,而電能表在自動化檢定系統內部流轉運輸是借助計量托盤進行的,故電能表在兩種運輸載體之間的移載必須借助機器人完成的,單個周轉箱最多可盛放15只電能表,而一個計量托盤可盛裝6只電能表。
1 上下料單元運行概況
上下料單元由上、下料機器人、上、下料線、周轉箱運輸線A/B、計量托盤運輸線和一系列監控傳感器[3]組成,如圖1所示。其中,機器人夾爪[4]一次能抓取3只電能表或1個空周轉箱(后簡稱“空箱”),上料機器人操作半徑覆蓋上料位、放表位、疊垛位,而下料機器人操作半徑覆蓋下料位、取表位和拆垛位。
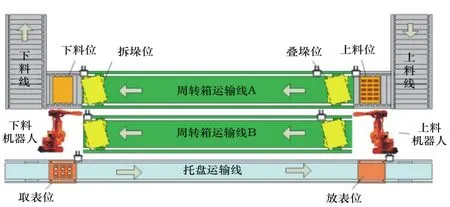
圖1 自動化檢定系統布局圖
電能表上料環節是機器人在上料位抓取電能表移載至放表位放置,簡稱“抓表上料”,如圖2所示。
電能表下料環節是機器人在取表位抓取電能表移載至下料位放置,簡稱“抓表下料”,如圖3所示。
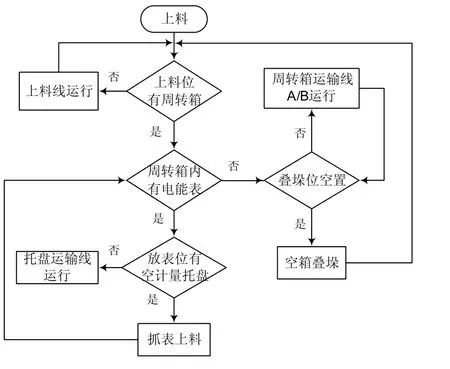
圖2 上料環節流程圖
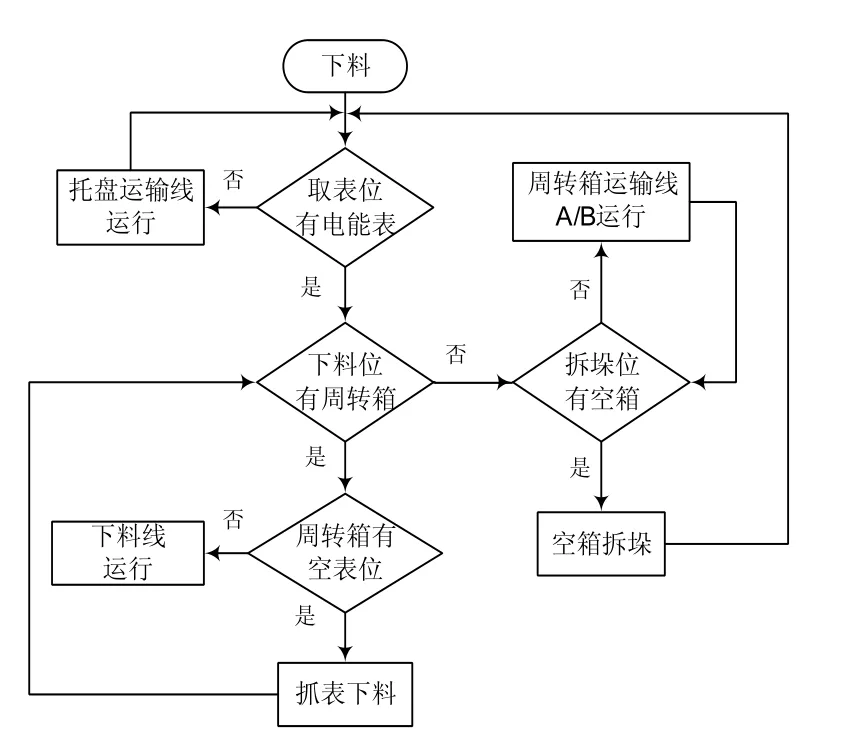
圖3 下料環節流程圖
上料位產生的空箱由機器人移載至疊垛位進行緩存[5],簡稱“空箱疊垛[6]”,反之,機器人拆垛過程稱為“空箱拆垛”。
按每個周轉箱盛放15只電能表,周轉箱運輸線A和B最大緩存空箱量均為6層7垛,合計84箱,其緩存量對應系統電能表最大檢定表位數。機器人以15°角度差將周轉箱依次向上疊垛,每垛最多6層,當疊滿6層后,周轉箱運輸線會自動向拆垛位方向移動,騰出下一個周轉箱疊垛位,當拆垛位發出空箱申請時,周轉箱運輸線會自動將疊垛位的空箱運輸至拆垛位。
該單元各抓取位上分別安裝有監視[7]用傳感器,傳感器輸出端連接PLC控制器以自動控制上料線、下料線、周轉箱運輸線和托盤運輸線的運行/停止狀態。
2 上、下料單元問題分析
2.1 機器人閑置
電能表上下料單元上、下料機器人執行策略是將全部上料或下料任務下發給同一個機器人,即上料機器人在完成15只電能表的抓表上料任務后,需要抓取上料位產生的空箱進行空箱疊垛動作,以便下一箱電能表進入上料位,此時下料位若沒有執行下料任務,下料機器人將處于空閑狀態,任務分配[8]原則是機器人動作“各負其責,自給自足”,同樣,當系統僅有下料任務時,下料機器人一直處于忙碌狀態,而上料機器人處于空閑狀態。
監控一批次電能表自動化檢定任務來反映機器人任務分配策略[9]。以一個批次電能表數量為10000只的檢定任務為例進行上下料速率統計,繪制了統計圖,如圖4所示,設X軸為完整檢定流程時間軸,X軸分度值為30s,Y軸對應機器人單位時間內抓表數量(單位:只),其中Y軸正方向對應上料機器人抓表數量,Y軸負方向對應下料機器人抓表數量。
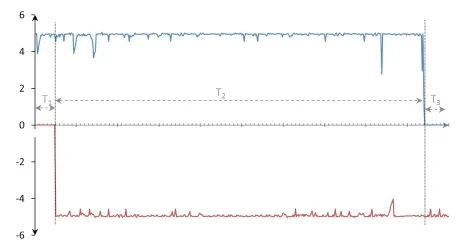
圖4 上、下料機器人運動周期利用率
按照檢定流程的特點,將檢定流程分為T1、T2和T3階段。
T1階段為檢定流程初始階段,僅有上料機器人執行上料任務;T2階段為上、下料同時發生階段,既有上料任務又有下料任務,批次數量越大,T2占整個時間軸比例越大;T3階段為檢定流程結束階段,僅有下料機器執行下料任務。
T1階段上料機器人每30s上表量為4.82只,下料機器人移載量幾乎為零,處于空閑狀態;T2階段上料機器人和下料機器人運動速率幾乎相同;T3階段下料機器人每30s上表量為4.92只,上料機器人移載量為零,處于空閑狀態。
綜上,上、下料機器人在T1、T3階段均存在空閑時間段,機器人設備利用率[10]有提升空間,若能合理搭配上、下料機器人同一時刻工作任務,使其分工合作,協調配合,電能表上下料單元運行速率將可加快。
2.2 周轉箱反復拆垛、疊垛
周轉箱作為電能表出庫、回庫的盛裝載體,是銜接智能立庫與自動化檢定系統的運輸媒介,周轉箱在電能表移載完畢變成空箱后,將被再次利用到后續的電能表下料環節,盛裝檢定合格的電能表并運輸回庫,故系統設計周轉箱運輸線A、B的主要目的是實現空箱的合理緩存,確保周轉箱在自動化檢定系統內的循環利用。
隨機選取5個不同批次的周轉箱的進行跟蹤,統計周轉箱和電能表在系統內流轉時間,統計數據如表1所示,對比發現周轉箱流轉時間遠短于電能表的檢定耗時,即空箱在被機器人疊垛后,在約13.85min后再次被運輸到拆垛位被機器人拆垛,機器人短時間內反復拆垛、疊垛不僅占用了機器人抓表時間,也降低了系統上、下料速率,說明周轉箱緩存空間過大,降低了自動化系統運行效率,制約了系統檢定能力。
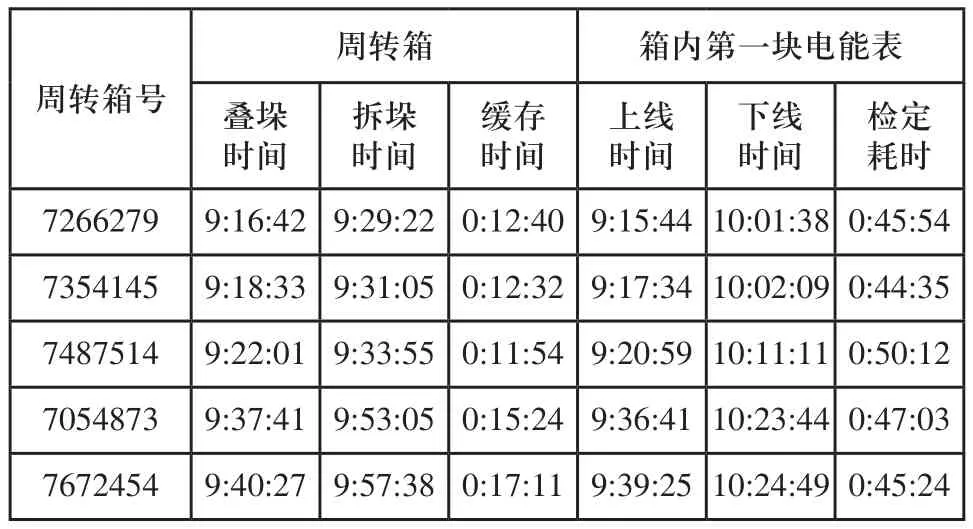
表1 周轉箱流轉情況跟蹤
2.3 電能表上、下料單元任務剖析
考慮到機器人任務配合問題和承擔任務的獨立性,周轉箱的緩存方式、最大緩存容量設計需滿足系統快速上下料和空箱反復利用的要求,即:上料位要及時清空空箱以便下一箱表入位上料,而下料位要確保始終放置有空箱,下料速率不受空箱制約,使得電能表上、下料任務的有序推進。
在現有系統硬件布局下,機器人執行能力如圖5所示,抓表上料任務僅能由上料機器人完成,抓表下料任務僅能由下料機器人完成,而剩余的空箱疊垛和空箱拆垛任務可按任務均衡原則合理分配給不同機器人,盡量使得同一時間上、下料機器人任務不空閑。
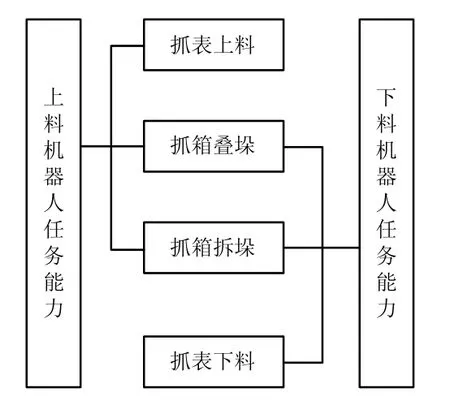
圖5 機器人任務能力
策略設計將空箱疊垛任務分配給下料機器人,則T1階段上料機器人負責抓表上料的同時,下料機器人負責疊垛,如表2所示,上料機器人的動作路徑得以簡化,執行對象僅為電能表,上料機器人抓表速率將提高;同理,將空箱拆垛任務分配給上料機器人,則T3階段下料機器人負責抓表下料的同時,上料機器人負責拆垛,下料機器人動作路徑得以簡化,執行對象僅為電能表,下料機器人抓表速率將提高。
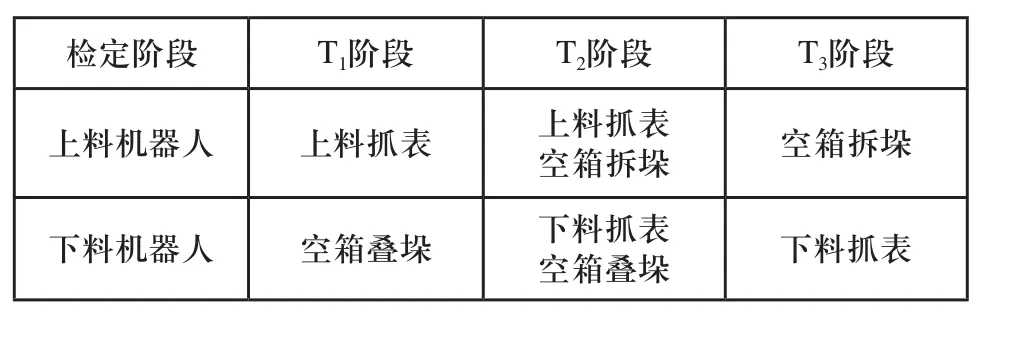
表2 任務分配策略
當上、下料速率近似相等情況下,僅需少量空箱緩存即可調節T2階段上、下料環節空箱產生和使用需求,即設置單層周轉箱運輸線。通過安裝在單層周轉箱運輸線上的傳感器,自動控制運輸線的運輸,使得上料位產生的空箱能自動運輸到下料位,供給下料機器人使用。
3 策略優化對比
策略設計需要實現各硬件聯動控制,設計如圖6所示,控制系統與PLC控制器聯動,上、下料機器人接收控制系統指令,PLC控制器信號輸入為上料位傳感器、下料位傳感器和周轉箱緩存監視傳感器,PLC控制器信號輸出為控制周轉箱單層運輸線、周轉箱多層運輸線和托盤運輸線運行/停止。
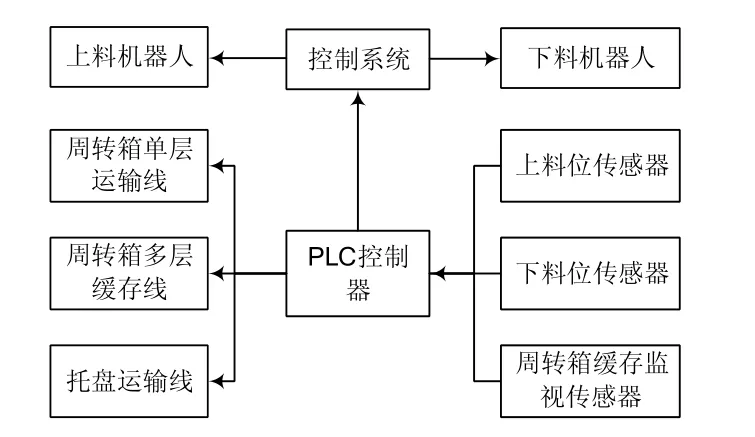
圖6 系統控制
3.1 系統布局改進
系統優化布局圖如圖7所示,周轉箱單層運輸線設置8個單層緩存空箱位,即可緩存8個空箱,空箱由上料位產生后由上料位傳感器感應,并控制向下料位方向緩
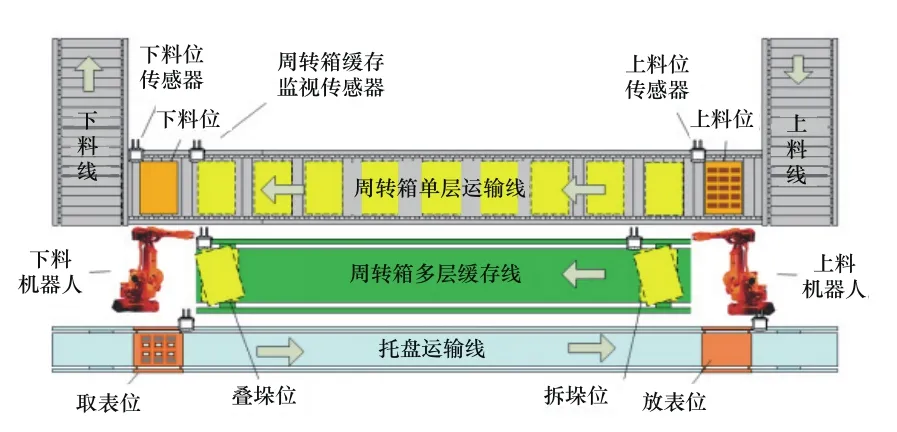
圖7 優化后自動化檢定系統布局圖
【】【】
存一個箱位,以此類推,一旦周轉箱單層運輸線滿載,則可由周轉箱多層緩存線進行空箱疊垛緩存,最多可緩存6層7垛空箱。
綜上,僅在周轉箱多層緩存線需要投入使用時,上下料機器人才需要執行空箱疊垛和空箱拆垛動作。
3.2 優化效果對比
按照電能表上、下料單元策略優化設計,對10個新到貨批次的自動化檢定任務中電能表上、下單元機器人抓表數量進行監視,隨機選取了其中一個10000只電能表的批次繪制運行效果,如圖8所示,圖中保留了優化前的數據進行對比,清晰看出策略設計的優勢,主要有以下三個方面:
1)單位時間內上、下料機器人抓表量均大幅提高。優化后,上料機器人每30s上表量為6.91只,較優化前提高了43.26%;下料機器人每30s下表量為7.05只,較優化前提高了43.30%,策略優化效果明顯。
2)在T1,T3階段中,同一時刻上、下料機器人執行任務得以均衡分配。T1階段,上料機器人負責抓表上料,下料機器人負責空箱疊垛,每30s疊垛量為4.88只;T3階段,下料機器人抓表下料,上料機器人空箱拆垛,每30s疊垛量為4.87只。
3)周轉箱運輸線優化改進為周轉箱單層緩存線后,T2階段,上、下料機器人抓取周轉箱的頻次大幅降低,尤其是上、下料速率近似相同時,上下料機器人可以省略抓箱疊垛、拆垛動作,系統效率較優化前提高35.87%。
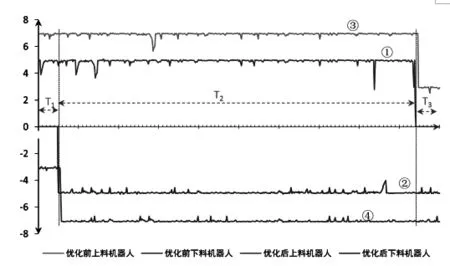
圖8 策略優化效果對比
4 結束語
該優化設計將系統中各自動化設備進行關聯,簡化了機器人同一時刻任務對象,任務速率得以提升,加之空箱緩存策略的配合,大幅縮短任務執行周期。該策略設計在湖北省電力公司計量中心單相二期自動化系統中得到驗證,系統年檢定效率提高25.01%,策略優化效果明顯,具有推廣應用價值。
[1]李克勤.計量自動化檢測系統中存在的問題及對策[J].儀器儀表標準化與計量,2014(4):46-48.
[2]石洪,夏水斌,蔡文嘉.智能化倉儲系統周轉箱方案分析與研究[J]電測與儀表,2014,51(16A),134-139.
[3]竇圣霞.電能表自動化檢定系統監控功能的完善[J].寧夏電力,2015(6):25-27.
[4]李凱,張俊俊,劉滿祿,張華.兩指自適應機械夾持器設計與研究[J].制造業自動化,2016,38(10).
[5]李林霞,周洪超,馬紅斌,侯興哲,胡天鏈.電能表鉛封自動化系統的設計與實現[J].制造業自動化,2011,33(18):145-148.
[6]丁恒春,付國棟,冉茂軒,孫志杰,宋小勇.一種周轉箱立體倉庫出入庫輸送系統[P].
[7]熊德智,陳向群,胡軍華,李勁柏,楊杰,陳福勝.電能表全自動柔性檢定系統關鍵技術研究[J].電測與儀表,2016,53(18):41-44.
[8]王友發.面向智能制造的多機器人系統任務分配研究[D].南京大學,2016.
[9]張崳,劉淑華.多機器人任務分配的研究與進展[J].智能系統學報.2008,3(2):115-120.
[10]翟曉卉.智能電能表自動化流水線檢定系統的設計與實現[J].山東電力技術.2014,41(6):36-38.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32