鼢鼠挖掘活動及爪趾幾何特征量化分析
2018-03-30 01:41:23王洪昌王忠民佟金
安徽農(nóng)業(yè)科學 2018年9期
王洪昌,涂 鳴,劉 念,曾 榮,王忠民, 佟金
(1.華中農(nóng)業(yè)大學工學院,湖北武漢 430070;2.農(nóng)業(yè)部長江中下游農(nóng)業(yè)裝備重點實驗室,湖北武漢 430070;3.興安盟草原工作站,內(nèi)蒙古烏蘭浩特 137400;4.吉林大學生物與農(nóng)業(yè)工程學院,吉林長春 130022)
生物經(jīng)過億萬年的進化和優(yōu)勝劣汰的過程,優(yōu)化了生物體宏觀與微觀結(jié)構(gòu)、形態(tài)與功能、運動方式與行為、能量與物質(zhì)轉(zhuǎn)化方式等,使其適應周圍環(huán)境的能力得到大大的提升。仿生學是研究生物系統(tǒng)的結(jié)構(gòu)、性狀、原理、行為,為工程技術(shù)提供新的設(shè)計思想、工作原理和系統(tǒng)構(gòu)成的技術(shù)科學,是一門生命科學、物質(zhì)科學、數(shù)學與力學、信息科學、工程技術(shù)以及系統(tǒng)科學等學科的交叉學科,它的出現(xiàn)為科學技術(shù)創(chuàng)新提供了新思路、新原理和新理論[1-2]。土壤洞穴動物長期生活在土壤環(huán)境中,經(jīng)過長期進化,已優(yōu)化出能適應土壤環(huán)境的活動方式和能力,逐步形成了獨特的幾何結(jié)構(gòu)和優(yōu)良的功能,這些突出的特征能為人們的仿生研究提供很好的基礎(chǔ)[3-5]。
鼢鼠(Myospalax)屬哺乳綱、嚙齒目、鼠形亞目、鼠總科、鼴形鼠科、鼢鼠亞科,俗稱瞎老鼠、地羊。鼢鼠是典型的土壤洞穴動物,常年營地下生活,地面活動較少,體型粗圓,眼睛退化嚴重,視覺極不發(fā)達,嗅覺與聽覺發(fā)達,避光怕風,喜食植物地下根莖,每年的4—5月和9—10月是其活動的高峰期,鼢鼠的生物學特性以及對草原、林場、農(nóng)作物等的危害已被大量研究[6-11]。鼢鼠四肢短粗有力,前爪特別發(fā)達,其中尤以第3趾(中間趾)最長,在挖掘洞道過程中發(fā)揮重要作用。鼢鼠挖掘能力強,有研究表明,1 min能挖掘80~100 mm長的洞道,它的平均挖掘速度達到50 mm/min,每只鼢鼠一年推出地面的土量達到1 024 kg[12-14]。林恭華等[15]研究發(fā)現(xiàn),高原鼢鼠與挖掘效率有關(guān)的尺骨挖掘動力臂系數(shù)是高原鼠兔和根田鼠的2倍多,顯示其較強的挖掘能力。因此鼢鼠爪趾為土壤挖掘和切削工具的仿生設(shè)計提供了很好的學習參照,筆者通過研究東北鼢鼠的挖掘活動規(guī)律,爪趾幾何結(jié)構(gòu)特征以及爪趾內(nèi)外輪廓線特征,為后續(xù)土壤挖掘和切削工具的仿生設(shè)計提供技術(shù)參考。
1 材料與方法
1.1材料供試東北鼢鼠(Myospalaxpsilurus)(圖 1) 捕捉于內(nèi)蒙古自治區(qū)興安盟科爾沁右翼前旗西北部的滿族鄉(xiāng)(120°57′~121°50′E,46°26′~47°02′N)。東北鼢鼠生活環(huán)境的土壤類型主要是黑鈣土、栗鈣土和草甸土。選取3只成年雄性東北鼢鼠為主要研究對象,體重為(0.37±0.05)kg。

圖1 捕捉的東北鼢鼠照片F(xiàn)ig.1 A photograph of a captured Myospalax psilurus
1.2挖掘活動的觀察將東北鼢鼠飼養(yǎng)在尺寸為800 mm×400 mm×700 mm的玻璃缸內(nèi), 玻璃缸內(nèi)裝有野外取回的土壤,缸體下部開有用于通氣的小孔,由于東北鼢鼠怕光同時為防止逃脫,缸口用布和木板壓蓋,所用玻璃缸見圖2。用胡蘿卜、土豆、白菜、草根等加以喂養(yǎng),發(fā)現(xiàn)其對胡蘿卜的喜食程度較高。用高清攝像機拍攝東北鼢鼠挖掘活動的過程,用EDIUS6.0視頻處理軟件對采集的視頻信息進行處理。

圖2 觀察東北鼢鼠挖掘活動的玻璃缸Fig.2 The observed aquarium of Myospalax psilurus burrowing activities
1.3幾何特征的觀察采用二氧化碳吸入法將鼢鼠處死[16],將鼢鼠前后爪趾切下,用85%酒精清洗后風干,制成樣本。采用奧林巴斯SZX12型體視顯微鏡觀察鼢鼠爪趾形態(tài)和幾何結(jié)構(gòu)。
1.4爪趾輪廓特征曲線提取及分析利用MATLAB軟件的形態(tài)學數(shù)字圖像處理功能,對鼢鼠爪趾輪廓特征進行提取,將提取的特征曲線進行擬合,得到內(nèi)外輪廓曲線擬合方程,并分析內(nèi)外輪廓曲線曲率的變化規(guī)律。
1.5仿生除草鏟設(shè)計將鼢鼠前爪爪趾內(nèi)輪廓曲線方程應用到農(nóng)業(yè)機械觸土部件的設(shè)計中,設(shè)計了一種用于苗期株間除草的仿生除草鏟,并對其進行仿真分析。
2 結(jié)果與分析
2.1爪趾的幾何結(jié)構(gòu)特征東北鼢鼠的前后爪趾(分別見圖 3和圖 4)在宏觀形態(tài)上有著明顯的差異。前爪粗壯、厚大,爪尖而利,呈鐮刀狀,是主要的挖掘器官。爪趾根部厚而粗,呈橢圓形,中間三趾前端呈圓錐楔,外側(cè)兩趾扁平且前端稍尖,爪趾根部到前端之斷面尺寸逐漸變小,這種結(jié)構(gòu)在保證爪趾結(jié)構(gòu)強度的情況下,在挖掘過程中有利于入土;后爪爪趾短而薄,呈拱形,在挖掘過程中可以牢牢的抓住地面并支撐身體,扒土時容易將土扒向后方;后爪有較大的肉墊,在挖掘活動中主要起支撐身體的作用。

圖3 東北鼢鼠前爪Fig.3 Fore claw of Myospalax psilurus
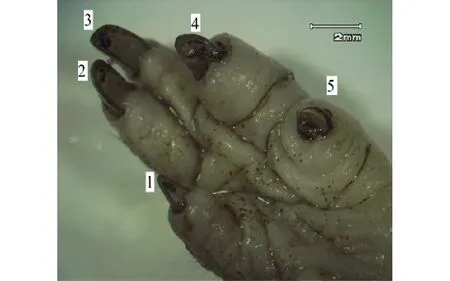
圖4 東北鼢鼠后爪Fig.4 Hind claw of Myospalax psilurus
東北鼢鼠的前爪是主要的挖掘工具,其排列方式與鼴鼠、達烏爾黃鼠、家鼠等“一”字排列不同[2,17]。東北鼢鼠前爪爪趾是空間弧線形排列,中間趾(見圖 3中的標號3)在最前端,第2趾和第4趾在中間趾后側(cè)一定角度和距離處,第1趾和第5趾排列最靠后,這種排列方式使前爪中間三趾組成立體凹型空間,形成挖掘斗,在挖掘過程中像挖掘機似的高效掘土,增強其挖土能力,第1趾和第5趾在挖掘過程中起輔助作用。利用游標卡尺測量前爪各爪趾,結(jié)果表明前爪中趾(即第3趾)長度、寬度和厚度均大于其他趾,在挖掘過程中起主要作用,因此選取爪趾3作為后續(xù)的研究樣本,其幾何形體如圖 5所示。

圖5 東北鼢鼠前爪中間趾照片F(xiàn)ig.5 The middle toe of fore claws of Myospalax psilurus
由圖 5可知,前爪中趾根部寬而厚,越靠近尖部越薄,使爪趾尖部呈楔形,經(jīng)測定,前爪中趾的兩向楔角分別為28.5°和39.6°,這與耕作部件楔角隨阻力變化的最小角度在20°~45°相符合[18],楔形的爪趾端部一方面能減小應力集中,增強與環(huán)境條件相適應的機械強度,提高在土壤挖掘過程中的耐磨性能;另一方面是在保證楔入力盡量大的情況下,使頂端過度圓角增大,改善端部土壤應力分布,改變壓實土壤的形狀,減少土壤黏附。爪趾背面呈弧線形,且曲面光滑平緩,光滑的背面在減少挖掘阻力的同時能保證挖掘的洞道表面光滑平整。爪趾內(nèi)側(cè)中部到尖部相較于根部與中部之間有一定變化,有磨損痕跡,并且磨損痕跡不對稱,這是由鼢鼠的挖掘方式造成的,在掘土過程中爪趾前部與土壤接觸較多時間也長,受力較大,磨損嚴重,后部主要功能是使土壤沿爪趾面翻轉(zhuǎn)滑落,磨損較輕,且爪趾在挖掘過程中與地面垂直面呈一定角度,爪趾受力不均勻,磨損程度不同,出現(xiàn)不對稱的磨損痕跡。
2.2挖掘活動規(guī)律通過視頻分析,東北鼢鼠在挖掘過程中的主要行為總結(jié)如下:① 頭部揚起或伸入土壤內(nèi),鼻端靠近挖土點上方,用于探測方向和感知土壤堅實度,兩只強有力的前爪交替掘土,為了便于掘土,在挖掘過程中爪趾與地面垂直面呈一定角度。②當掘下的土達到一定量時,用前爪將土壤扒至后爪處,并用后爪迅速將土踢向身體后方。③身體后方的土壤堆積到一定程度后,東北鼢鼠轉(zhuǎn)身,背部弓起,收縮身體前部將身體重心落向后足,后足牢牢抓緊地面支撐身體,用頭部和前爪通過伸展身體將土向前方推動,直至將土推出洞口。④在挖掘過程中遇到草根等食物時,用前爪抓住草根,用牙齒將草根咬斷,然后送入口中進食,如若遇到石塊等物體,隨土壤將其推出地面(在野外地面土丘土壤中發(fā)現(xiàn)有大小不一的石塊)。⑤挖掘一段距離后,用鼻端對洞道進行修正,以使土壤堅硬不至于掉落。李曉晨等[19]對鼢鼠洞道結(jié)構(gòu)的建筑學意義進行了研究。
鼢鼠其中一次的挖掘過程的動作如圖6所示,可知鼢鼠的挖掘動作與反鏟挖掘機的挖掘動作相似,在沿洞道軸向挖掘時(圖6a),前肢向前部伸出的同時繞前肢與橈尺骨的關(guān)節(jié)轉(zhuǎn)動,將爪子插入土中一定深度,頭部頂住前方未挖掘的土壤以便用力向后上方拉動,身體拱起,把挖出的土拉到身體下部存儲,達到一定量后轉(zhuǎn)身用頭部和前爪將土推向洞道后方。在沿洞道徑向挖掘時(圖6b),后肢做為支撐,頭部稍微揚起, 爪子繞與橈尺骨關(guān)節(jié)轉(zhuǎn)動時,中間三趾向上張開,所形成的空間達到最大,使一次挖掘的土壤盡可能多,其中中間趾(標號3)是主要的挖掘趾,其入土最深,行程最大。
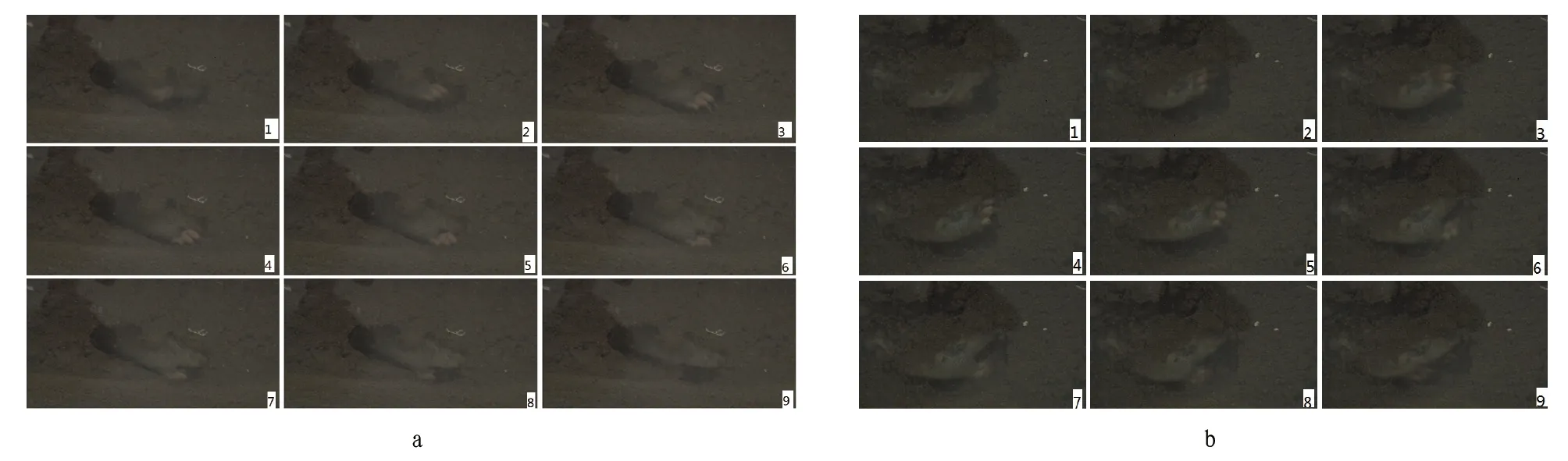
注:a.沿洞道軸向挖掘;b.沿洞道徑向挖掘Note:a.Digging along the axial direction of hole;b.Digging along the radial direction of hole圖6 一只前爪的挖掘過程說明Fig.6 The digging process diagram of a fore claw
鼢鼠在挖掘過程中,挖掘前肢左右開工,每次挖掘用一只前肢,另一只前肢與后肢起支撐作用。其前爪的挖掘運動近似為不規(guī)則的橢圓形(如圖7),可以分為挖掘行程與返回行程,其中挖掘行程路線較長,返回行程路線短,這樣前肢在挖掘過程中與土壤接觸時間長,并且減少非挖掘行程的能耗,提高挖掘效率。
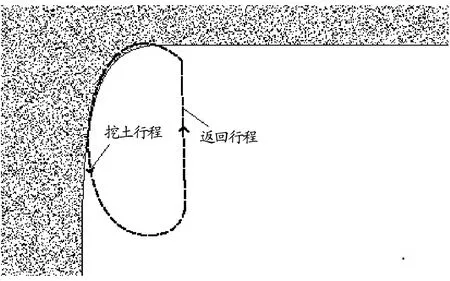
圖7 前爪挖掘運動示意Fig.7 The digging motion diagram of fore claw
2.3爪趾輪廓特征曲線提取前爪爪趾是東北鼢鼠在挖掘過程中的主要挖掘工具,對爪趾幾何結(jié)構(gòu)特征的研究具有仿生學意義。為了更深入地了解東北鼢鼠爪趾輪廓的幾何結(jié)構(gòu)特征,在MATLAB軟件中編程,利用軟件的形態(tài)學數(shù)字圖像處理功能,通過以下步驟對圖像進行處理:①利用“rgb2gray”命令通過RGB各個分量的的加權(quán)和將RGB圖像轉(zhuǎn)換為灰度圖像。②對圖像進行封閉運算即先膨脹后腐蝕,填補圖像空洞,連接相鄰的對象和邊界及區(qū)域,消除圖像中的干擾點。③設(shè)置合適的閥值,基于閥值分割識別邊緣,得到歸一化的直方圖并將灰度圖像轉(zhuǎn)換為二值圖像。④對爪趾的邊緣輪廓進行提取,存儲邊緣輪廓的二維點云坐標值以備后續(xù)處理,提取邊緣輪廓后的圖像如圖 8所示。
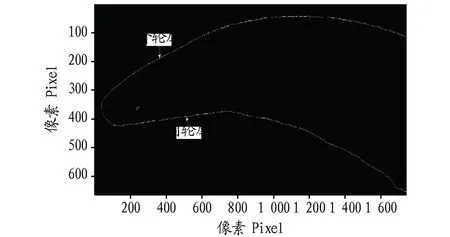
圖8 提取邊緣后圖像Fig.8 The middle toe of fore claws of Myospalax psilurus
將提取的邊緣輪廓的二維數(shù)據(jù)利用最小二乘法進行擬合,以曲線方程的形式對特征進行進一步描述[20],借鑒對鼴鼠、達烏爾黃鼠、小家鼠等嚙齒動物前爪爪趾輪廓曲線的擬合函數(shù)形式[21-24],分別嘗試用指數(shù)函數(shù)、多項式函數(shù)、高斯函數(shù)、傅里葉函數(shù)對鼢鼠爪趾輪廓曲線進行擬合,得到擬合方程,發(fā)現(xiàn)多項式函數(shù)和高斯函數(shù)與數(shù)據(jù)的擬合程度較好,通過判定系數(shù)R2和殘差平方和SSE分別對多項式函數(shù)和高斯函數(shù)兩種擬合形式的擬合精度進行比較,其中SSE值越接近于0表明曲線擬合越精確,R2越接近于1,表明方程擬合度越高。表1和表2分別列出了其中一只鼢鼠前爪中趾內(nèi)外輪廓曲線的多項式函數(shù)和高斯函數(shù)的擬合方程系數(shù)、判定系數(shù)R2以及殘差平方和SSE。通過對比發(fā)現(xiàn),多項式函數(shù)在相同階數(shù)的情況下擬合度更高更精確,因此最終選擇7階多項式方程擬合中趾內(nèi)輪廓曲線(圖 6所示位于下方的輪廓特征),6階多項式方程擬合爪趾外輪廓曲線(圖 6所示位于上方的輪廓特征)。
表1東北鼢鼠前爪中趾內(nèi)外輪廓曲線擬合方程系數(shù)及判定系數(shù)-多項式函數(shù)
Table1CoefficientsoftheprofileequationsfittedandtheircoefficientofdeterminationofthemiddletoeofforeclawsofMyospalaxpsilurus-Polynomialfunction

項目Item方程系數(shù)Coefficientofequationp1p2p3p4p5p6p7p8判定系數(shù)(R2)Judgmentcoefficient殘差平方和(SSE)Sumofsquaresofresiduals內(nèi)輪廓Internalprofile2.705×10181.721×10144.469×10116.073×1084.591×1050.019123.9980.054680.99951.089×104外輪廓Outercontour2.125×10161.145×10122.344×1092.27×1060.0012870.7472299.30.99964093
表2東北鼢鼠前爪中趾內(nèi)外輪廓曲線擬合方程系數(shù)及判定系數(shù)-高斯函數(shù)
Table2CoefficientsoftheprofileequationsfittedandtheircoefficientofdeterminationofthemiddletoeofforeclawsofMyospalaxpsilurus-Gaussianfunction
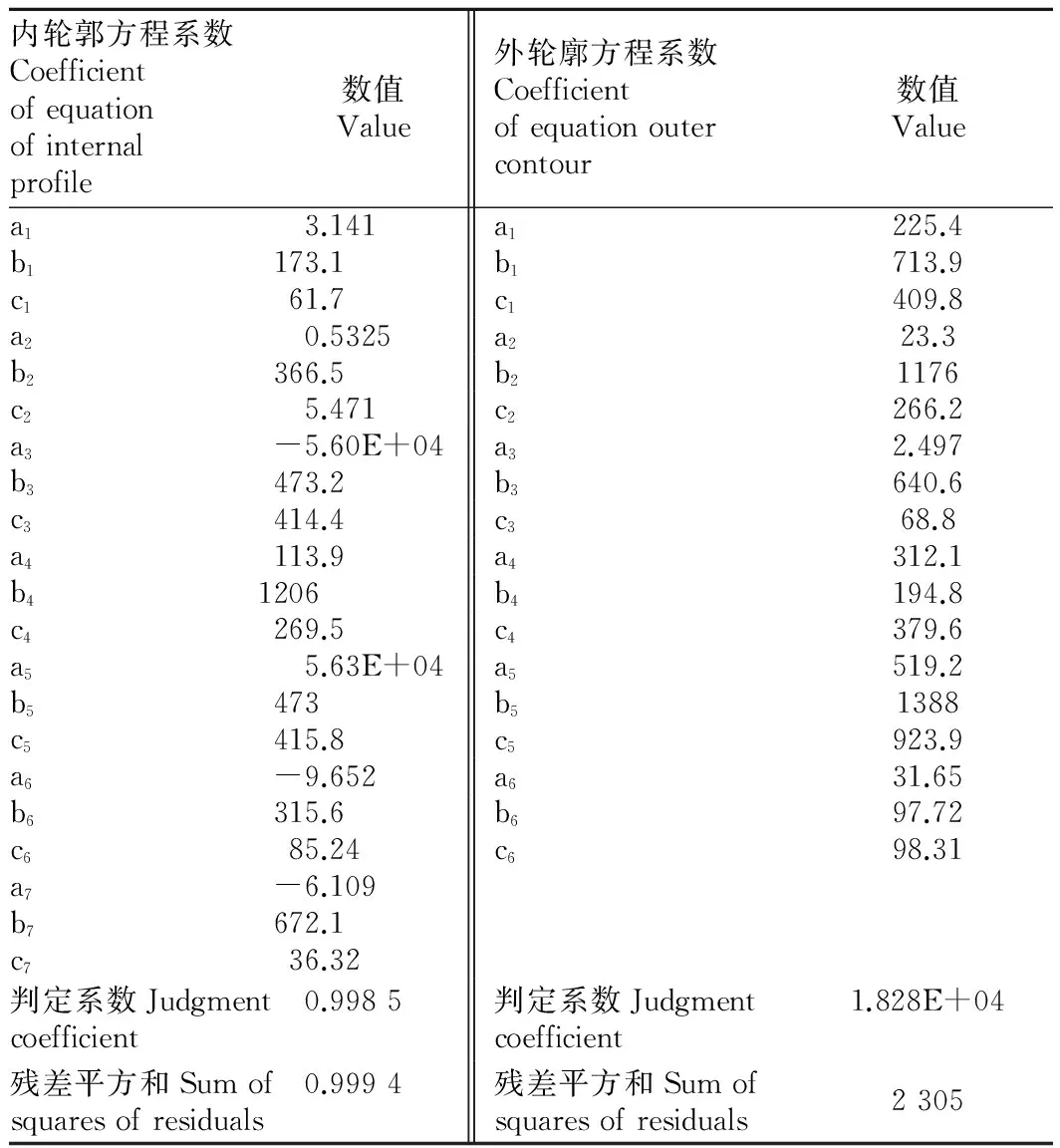
內(nèi)輪郭方程系數(shù)Coefficientofequationofinternalprofile數(shù)值Value外輪廓方程系數(shù)Coefficientofequationoutercontour數(shù)值Valuea13.141 a1225.4b1173.1b1713.9c161.7c1409.8a20.5325a223.3b2366.5b21176c25.471c2266.2a3-5.60E+04a32.497b3473.2b3640.6c3414.4c368.8a4113.9a4312.1b41206b4194.8c4269.5c4379.6a55.63E+04a5519.2b5473b51388c5415.8c5923.9a6-9.652a631.65b6315.6b697.72c685.24c698.31a7-6.109b7672.1c736.32判定系數(shù)Judgmentcoefficient0.9985判定系數(shù)Judgmentcoefficient1.828E+04殘差平方和Sumofsquaresofresiduals0.9994殘差平方和Sumofsquaresofresiduals2305
內(nèi)外輪廓多項式方程的表達式如下:
內(nèi)輪廓曲線方程:
f(x)=p1x7+p2x6+p3x5+p4x4+p5x3+p6x2+p7x+p8
(1)
外輪廓曲線方程:
f(x)=p1x6+p2x5+p3x4+p4x3+p5x2+p6x+p7
(2)
根據(jù)擬合所得的多項式曲線方程,對輪廓曲線的一、二階導數(shù)及曲率進行計算,輪廓曲線的二階導數(shù)和曲率分別見圖 9和圖 10所示。
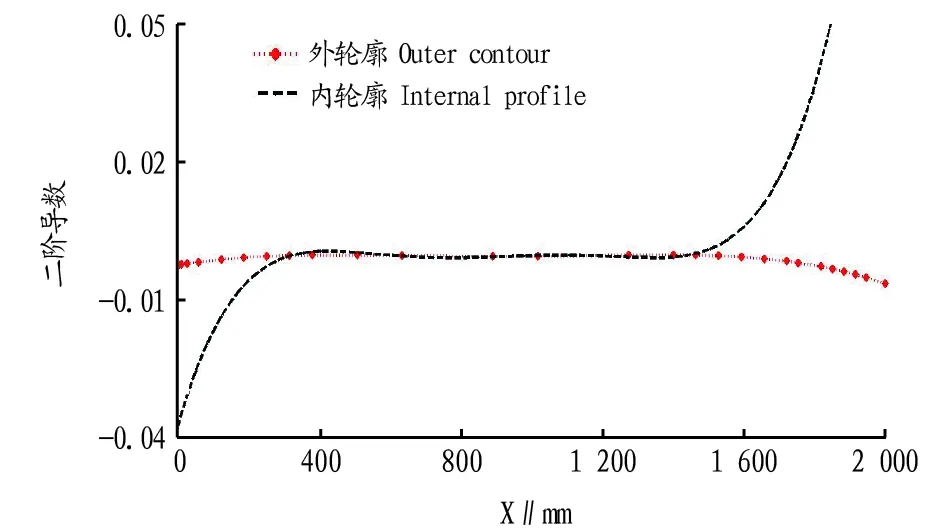
圖9 鼢鼠爪趾輪廓曲線二階導數(shù)Fig.9 The middle toe of fore claws of Myospalax psilurus
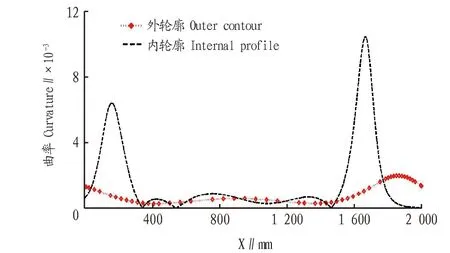
圖 10 鼢鼠爪趾輪廓曲線曲率Fig.10 The middle toe of fore claws of Myospalax psilurus
由圖 9可知,外輪廓曲線二階導數(shù)變化不明顯,內(nèi)輪廓曲線有2個拐點,且除個別點外均小于零,曲線呈凸狀。由圖 10可知,東北鼢鼠爪趾外輪廓曲率變化較小,說明爪趾外輪廓表面較為光滑平順,變化平緩,光滑的外輪廓能使鼢鼠在挖掘過程中減少摩擦阻力,使挖掘的洞道表面更加平整;爪趾內(nèi)輪廓曲率起伏較大,有明顯的波峰波谷出現(xiàn),爪趾內(nèi)輪廓表面變化較大是長期與土壤相互作用導致的,由于土壤的磨損致使爪趾前段曲率變化較大,變曲率特征在掘土過程中有利于土壤沿爪趾表面翻轉(zhuǎn)脫落,爪趾尖端的變曲率更利于爪趾入土,并提高爪趾的結(jié)構(gòu)強度。
2.4仿生除草鏟設(shè)計與仿真鼢鼠前爪內(nèi)輪廓是主要的觸土面,其輪廓特征為農(nóng)業(yè)機械觸土部件的設(shè)計提供了參考。該研究以前爪中間趾內(nèi)輪廓多項式方程為參考,根據(jù)農(nóng)藝要求設(shè)計了一種苗期株間除草鏟(如圖 11所示),其中圖11a為仿生曲線型除草鏟,圖11b為與仿生除草鏟對照的圓弧型除草鏟。
仿生除草鏟運動過程如圖 12所示,R是農(nóng)作物保護區(qū),Z是農(nóng)作物,除草鏟連接桿以離作物行距離a隨機器向前行進,在除草過程中兩個除草鏟垂直于農(nóng)作物行并侵入土壤20~30 mm,接近農(nóng)作物保護區(qū)時除草鏟向后擺動一定角度以避免侵入保護區(qū)傷苗,過了農(nóng)作物保護區(qū)后再擺正繼續(xù)除草。
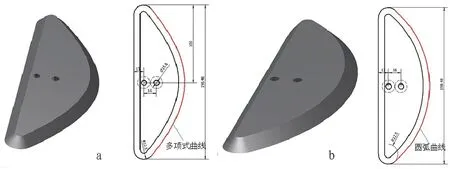
注:a.多項式曲線型除草鏟;b.圓弧型除草鏟Note:a.Biometric weeding-shovel; b.Normal weeding-shovel圖 11 除草鏟三維示意Fig.11 3-D solid of the weeding-shovel
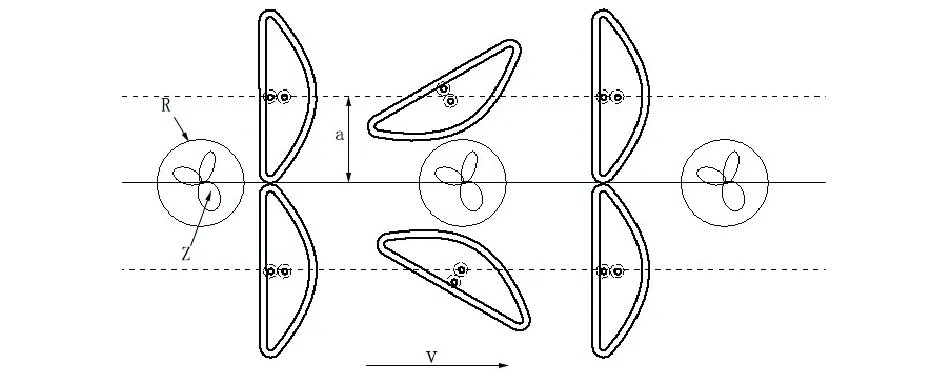
圖12 除草鏟運動過程示意Fig.12 The movement process of the weeding-shovel
除草鏟在運動過程中的受到來自土壤的阻力F和力矩M,在軟件Autodesk Inventor Professional 仿真模塊中分別對仿生曲線型除草鏟和圓弧曲線型除草鏟進行應力分析,材料均選Q235鋼,力F為100 N,力矩M為1,經(jīng)計算仿生曲線型除草鏟的體積和質(zhì)量分別為6.18E+4 mm3和0.485 kg,圓弧型除草鏟的體積和質(zhì)量分別為6.48E+4 mm3和0.51 kg,可以看出仿生除草鏟體積和質(zhì)量都有所降低。
由圖13可知,在受到相同力和力矩的情況下仿生除草鏟產(chǎn)生的位移較小,即仿生除草鏟在除草過程中能承受更大阻力,應力和應變的最大值集中在孔附近,且仿生曲線型除草鏟的應力應變要小于圓弧曲線型除草鏟,除草鏟的除草效果將在后續(xù)研究中開展。
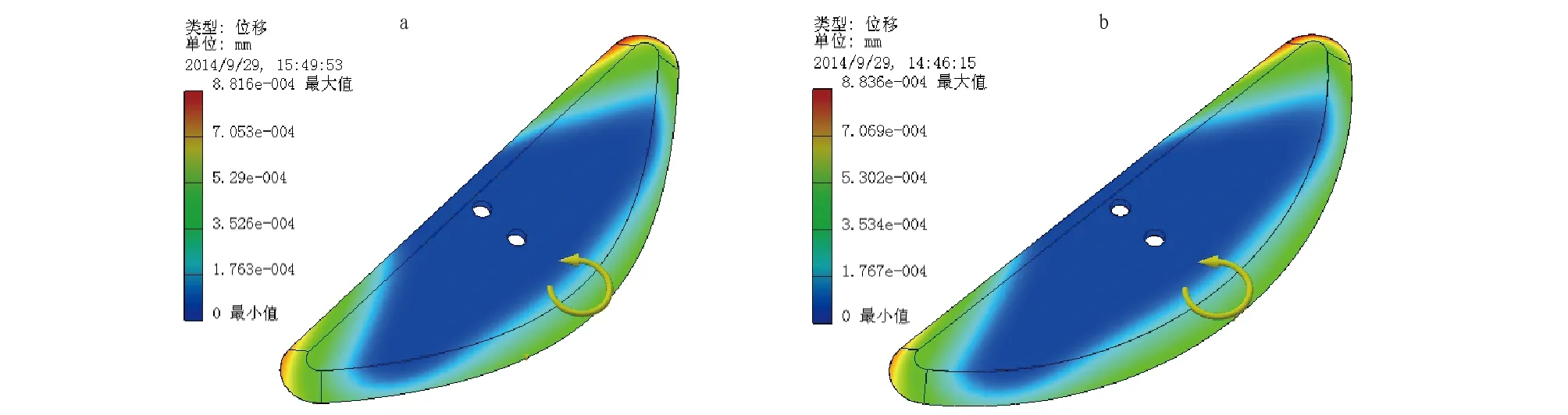
注:a.仿生除草鏟位移圖;b.圓弧曲線型除草鏟位移圖Note:a.The displacement of biometric weeding-shovel; b.The displacement of normal weeding-shovel圖 13 除草鏟的位移圖Fig.13 The displacement of the weeding-shovel
3 結(jié)論
該研究以終生營地下生活的土壤洞穴動物——東北鼢鼠為研究對象,對東北鼢鼠爪趾的幾何結(jié)構(gòu)特征進行了觀察和分析,重點觀察了其主要的挖掘工具―前爪第3趾,研究發(fā)現(xiàn)其前爪爪趾粗壯,尖而利,呈鐮刀狀,其中以第3趾最粗壯最大,前端端部呈楔型,這種結(jié)構(gòu)能減少應力集中,增強結(jié)構(gòu)強度,利于入土,并且其爪趾的排列方式與其他土壤洞穴動物不同,這是長期進化的結(jié)果,更有利于在土壤中挖掘;其挖掘方式大體可以分為掘土、踢土、推土、食物或障礙處理、修補洞道幾個步驟。利用MATLAB軟件對東北鼢鼠前爪中間趾進行數(shù)字圖像處理,得到邊緣特征圖像,采用最小二乘法對邊緣特征數(shù)據(jù)進行擬合,通過比較高斯函數(shù)和多項式函數(shù)曲線方程,最終選擇多項式函數(shù)作為爪趾內(nèi)外輪廓的特征曲線方程。經(jīng)過分析發(fā)現(xiàn),外輪廓曲線光滑平順,變化平緩,挖掘過程中能減少挖掘阻力,同時保證挖掘的洞道表面平整;內(nèi)輪廓曲線曲率特征變化較大,在掘土過程中土壤更易沿爪趾翻轉(zhuǎn)滑落。根據(jù)鼢鼠前爪中間趾內(nèi)輪廓曲線方程,設(shè)計了一種具有仿生結(jié)構(gòu)的苗間除草鏟,仿真結(jié)果表明仿生曲線型除草鏟在土壤中能承受更大阻力。
[1] LU Y X.Significance and progress of bionics [J].Journal of bionics engineering,2004,1(1):1-3.
[2] 汲文峰,佟金,賈洪雷,等.鼴鼠爪趾幾何結(jié)構(gòu)量化特征分析[J].農(nóng)業(yè)機械學報,2010,41(4):193-198.
[3] TONG J,SUN J Y,CHEN D H,et al.Geometrical features and wettability of dung beetles and potential biomimetic engineering applications in tillage implements[J].Soil and tillage research,2005,80(1):1-12.
[4] 吳娜,張伏,佟金.臭蜣螂唇基切土減阻的力學分析[J].農(nóng)業(yè)機械學報,2009,40(10):207-210.
[5] 高吭.東方螻蛄(GryllotalpaorientalisBurmeister):特征、功能、力學及其仿生分析[D].長春:吉林大學,2009.
[6] 朝克圖,盧保偉.東北鼢鼠生活習性和防治辦法的初步探討[J].內(nèi)蒙古草業(yè),2001,13(4):51-53.
[7] 徐濤,徐馳,孫繼權(quán).松嫩草原地區(qū)東北鼢鼠的發(fā)生特點[J].畜牧獸醫(yī)科技信息,2011(5):98.
[8] 劉仁華,劉炳友.林區(qū)鼢鼠鼠害的主要特征及其生態(tài)控制對策[J].獸類學報,1997,17(4):272-278.
[9] 段君鋼,任德波.東北鼢鼠危害林下參及防治方法[J].中國媒介生物學及控制雜志,2008,19(5):473.
[10] 任冬.東北鼢鼠的生活習性及其防治[J].內(nèi)蒙古林業(yè)調(diào)查設(shè)計,2007,30(6):68-70.
[11] 王權(quán)業(yè),周文揚,張堰銘,等.高原鼢鼠挖掘活動的觀察[J].獸類學報,1994,14(3):203-208.
[12] 楊盛強,黎懷鴻.高原鼢鼠的活動特點與草地退化的關(guān)系[J].四川草原,1990(2):36-39.
[13] 周文揚,竇豐滿.高原鼢鼠活動與巢區(qū)的初步研究[J].獸類學報,1990,10(1):31-39.
[14] WANG Q Y,ZHOU W Y,WEI W H,et al.The burrowing behavior ofMyospalaxbaileyiand its relation to soil hardness[J].Acta theriologica sinica,2000,20(4):277-283.
[15] 林恭華,曹伊凡,蘇建平.高原鼢鼠四肢骨的進化適應性分析[J].動物學雜志,2007,42(5):8-13.
[16] 王月,鄒曜宇.實驗動物的處死方法[J].現(xiàn)代農(nóng)業(yè)科技,2010(12):284.
[17] 郭志軍,周志立,任露泉.達烏爾黃鼠爪趾幾何特征分析[J].河南科技大學學報(自然科學版),2003,24(1):1-4.
[18] 任露泉,徐曉波,陳秉聰,等.典型土壤動物爪趾形態(tài)的初步分析[J].農(nóng)業(yè)機械學報,1990,21(2):44-49.
[19] 李曉晨,李娜,王冬.鼢鼠洞道結(jié)構(gòu)的建筑工程學分析[J].陜西師范大學學報(自然科學版),2001,29(3):86-90.
[20] 徐濤.數(shù)值計算方法[M].長春:吉林科學技術(shù)出版社,1998:62-77.
[21] 汲文峰,賈洪雷,佟金.旋耕-碎茬仿生刀片田間作業(yè)性能的試驗研究[J].農(nóng)業(yè)工程學報,2012,28(12):24-30.
[22] 汲文峰,賈洪雷,佟金.旋耕-碎茬仿生刀片田間旋耕作業(yè)功耗的試驗研究[C]//中國農(nóng)業(yè)工程學會 2011年學術(shù)年會論文集.北京:中國農(nóng)業(yè)工程學會,2011.
[23] 郭志軍,周志立,任露泉.仿生彎曲形切削工具切削性能的二維有限元分析[J].機械工程學報,2003,39(9):106-109.
[24] 張金波,佟金,馬云海.仿生減阻深松鏟設(shè)計與試驗[J].農(nóng)業(yè)機械學報,2014,45(4):141-145.
