閘墩水平位移監(jiān)測基準選擇分析
2018-03-31 02:28:11王守春
山西建筑 2018年7期
王 守 春
(天津市水利科學研究院,天津 300061)
1 常用的水平位移監(jiān)測方法
水平位移是指閘體軸線的縱向水平位移和垂直于閘體軸線的橫向水平位移。一般情況下,比較關心的是橫向水平位移,所以常用的觀測方法有前方交會法、視準線法、引張線、激光準直法等[1]。交會法適用范圍最廣,但其監(jiān)測及資料整理相對復雜,前方交會法的觀測對設站點的位置要求不高,所以比較靈活,而且能夠同時獲得各監(jiān)測點的縱向水平位移和橫向水平位移。但是,該方法精度不高。而其他幾種方法只能獲取橫向的水平位移。
2 多測回測角觀測方法
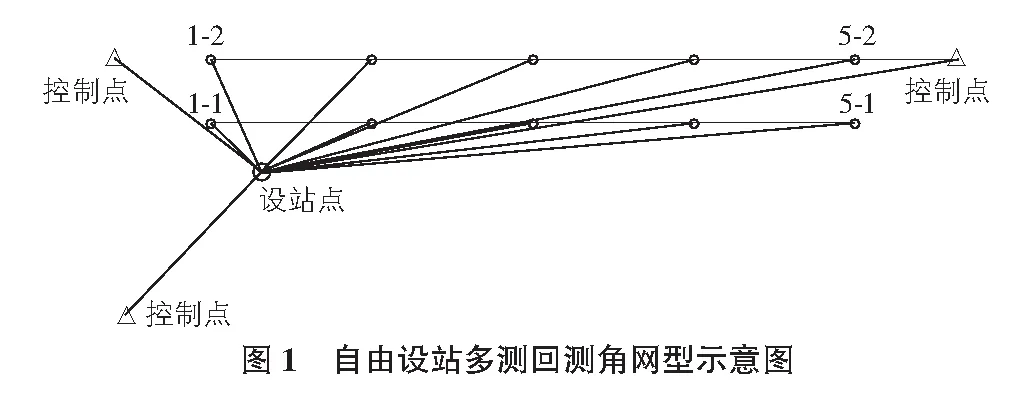
該方法在監(jiān)測點附近架設全站儀,采用自由測站邊角交會法進行測量,同時聯(lián)測附近的控制點,然后通過數(shù)據(jù)處理獲得監(jiān)測點坐標的一種方法。該方法與傳統(tǒng)的邊角網(wǎng)測量有很大差異,傳統(tǒng)的邊角網(wǎng)測量均是把儀器架設在已知的控制點上進行觀測,而多測回測角的方法無需把儀器架設在已知的控制點上。自由設站多測回測角觀測的網(wǎng)型圖如圖1所示。

(1)
(2)
基坑監(jiān)測點的坐標中誤差及其點位誤差分別為:
(3)
為了提高觀測值的精度,一般還要進行氣象改正。
3 觀測基準對多測回測角精度的影響
本部分結合天津市海河二道閘閘墩的水平位移監(jiān)測情況進行分析。本監(jiān)測項目采用徠卡全站儀(TS30),測角精度0.5″,測距精度0.6 mm+1 ppm。天津市海河二道閘閘墩水平位移監(jiān)測的網(wǎng)型圖如圖1所示。三個控制點的基礎埋深約為1.5 m,而且與閘體建設不是同一時期,加之距離控制50 m內(nèi)頻繁有車輛經(jīng)過,所以結合實測的數(shù)據(jù)初步判斷該監(jiān)測網(wǎng)中3個控制點的穩(wěn)定性比較差。部分監(jiān)測點坐標的變化過程線如圖2~圖5所示。
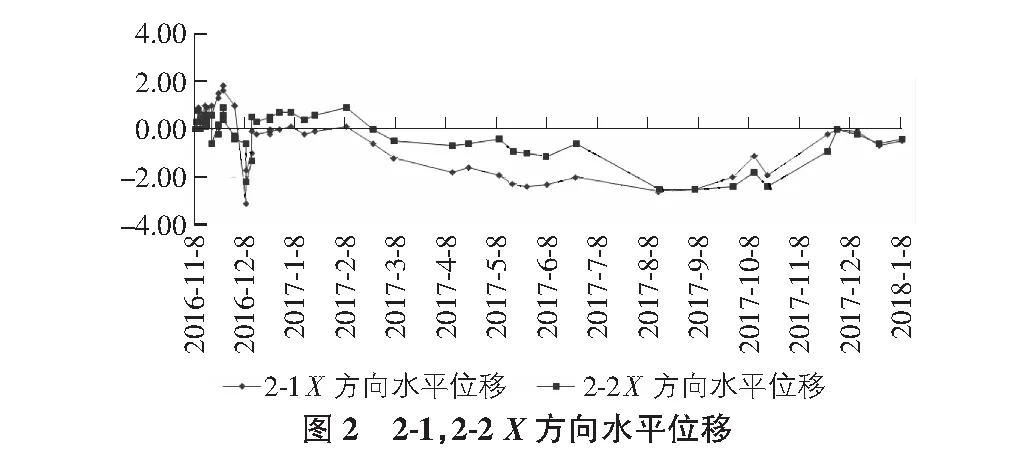
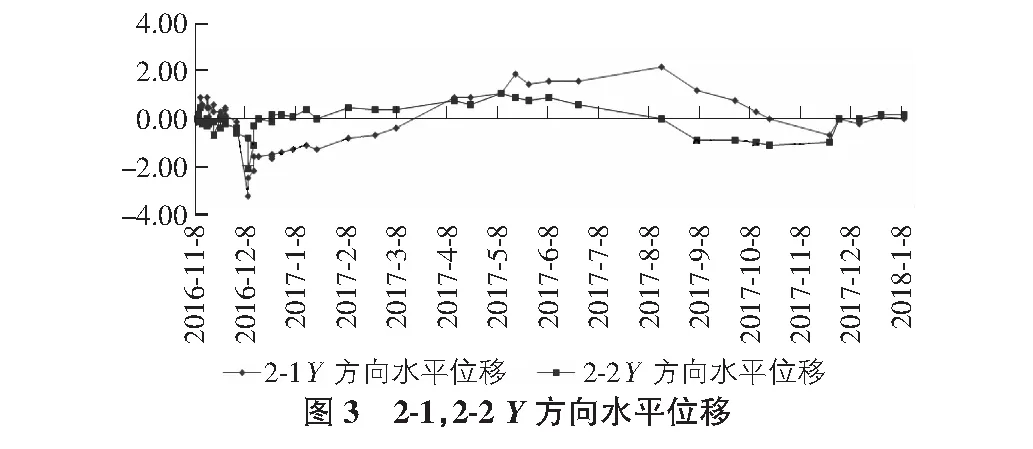
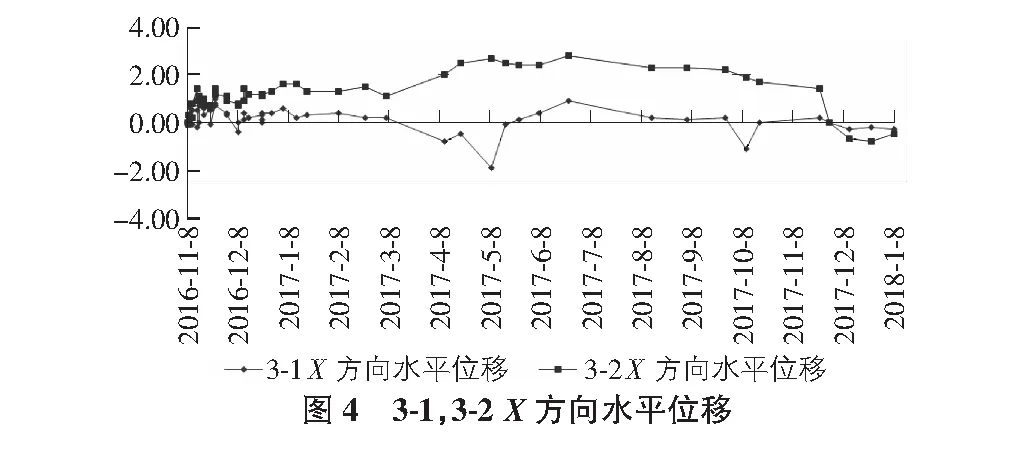
從圖2~圖5可以看出,2016年11月8日~2017年11月30日的變化過程線波動較大,特別是圖5中3-2Y方向的波動達5 mm之多,這顯然與實際是不符的。因為,該閘建成于1985年,各閘墩均有樁基,所以各閘墩經(jīng)過30多年之后應該比較穩(wěn)定,Y方向(水流向)的水平位移變化量不會在短期內(nèi)(2016年11月~2017年1月)達到5 mm。
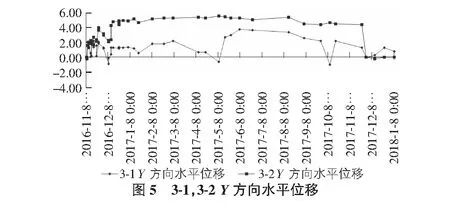
鑒于分析過氣象改正誤差對監(jiān)測精度的影響分析,所以可排除掉氣象改正的因素。于是,舍棄監(jiān)測網(wǎng)中的控制點,取監(jiān)測點中的1-1,5-2兩個點作為平差的起算點,可以得到各監(jiān)測點相對的水平位移。如圖2~圖5中2017年11月30日之后的變化過程線,該部分的變化過程線的波動均在1 mm以內(nèi),這與理論計算的誤差是相符的。
4 結語
在采用全站儀對閘墩進行水平位移監(jiān)測時,若控制點不夠穩(wěn)定,則可選取分布在監(jiān)測網(wǎng)兩端的兩個監(jiān)測點作為平差計算的起算點,從而可以得到各監(jiān)測點相對所選定監(jiān)測點的位移變化過程線。而且,相比傳統(tǒng)的視準線法只能獲取各閘墩水流向的水平位移,采用自由設站多測回測角的方法進行監(jiān)測時,則可同時獲取各閘墩監(jiān)測點的水流向和垂直于水流向的水平位移。
參考文獻:
[1]徐高飛,許小杰.淺談水工建筑物表面水平位移監(jiān)測方法[J].浙江水利科技,2007(4):54.
[2]楊雪峰,劉成龍,羅雁文.基于自由測站的基坑水平位移監(jiān)測方法探討[J].測繪科學,2011(5):154.
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
兒童故事畫報(2019年5期)2019-05-26 14:26:14
人大建設(2019年12期)2019-05-21 02:55:32
Coco薇(2016年2期)2016-03-22 02:42:52
學苑創(chuàng)造·A版(2015年11期)2016-01-14 09:03:27
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國火炬(2010年8期)2010-07-25 11:34:30
