未知緯度下基于正交基構建的SINS直接解析對準方法
2018-04-02 02:09:59鄭振宇楊常青
航天控制 2018年1期
關鍵詞:方法
鄭振宇 楊常青 唐 君
海軍大連艦艇學院,大連 116018
捷聯慣導初始對準是系統工作的基本前提,其核心任務是獲取載體坐標系相對導航坐標系的姿態關系。近年來,捷聯慣導初始對準已經形成了許多成熟的方法,如羅經對準法、基于最優估計的對準方法及基于矢量定姿的對準方法等[1-3],諸多方法在應用過程中都需要精確的緯度信息支持。目前,緯度信息常來源于衛星或無線電定位手段,而對于水下、地下及密林等無線電信號無法覆蓋的區域,獲得緯度值并非易事,因此,研究未知緯度下的對準方法成為近年來初始對準研究的一個重要方向。
在靜止基座下,捷聯慣導自對準常采用解析式對準方法,該方法以地球自轉角速度和重力矢量為基準,利用陀螺及加速度計觀測解算姿態矩陣,該方法需要利用緯度信息建立地球自轉角速度模型。為此,文獻[4]提出了先利用地球自轉矢量與重力矢量的角度關系估計緯度,再利用所估計緯度進行傳統的解析對準方法,對準后不能保證姿態矩陣的正交性,需要進行正交化處理。本文從方向余弦矩陣的物理意義入手,提出直接利用加速度計、陀螺輸出量構建標準正交基,最終建立姿態矩陣的對準方法,該方法未利用緯度信息,且不需要進行單獨的正交化過程。對準實驗表明該方法與已知緯度下的解析對準方法具有相同的精度,工程實用性較強。
1 未知緯度下傳統解析對準方法
傳統的解析式對準方法可表示為[5]:
(1)
(2)
由于2個矢量夾角與投影坐標系無關,因此,在靜止基座下可根據以上角度關系估計緯度值[4]:
(3)
利用式(3)所求緯度仍可應用解析對準方法計算姿態陣,且緯度估計誤差不影響對準精度。需要說明的是,采用式(1)得到的姿態矩陣并非正交矩陣,對準后需要進行正交化處理,常采用如下正交化處理方法[6]:
(4)
然而,在實際應用中,式(4)難以確保開方矩陣的正定性,工程上可采用如下迭代方法:
(5)
2 基于正交基構建的直接解析對準方法
2.1 方向余弦矩陣的正交基表示
解析對準方法本質上屬于雙矢量定姿的范疇,在數學上可以等效為利用線性無關向量組在2個坐標系下的坐標值求取坐標系之間的過渡矩陣。由于捷聯慣導采用的坐標系均以(1,0,0)、(0,1,0)和(0,0,1)為標準正交基,因此,也可以直接利用觀測量直接構建導航系正交基在載體系下的投影,該投影即為載體系到導航系的過渡矩陣。這種表示方式與方向余弦矩陣的物理意義是一致的,方向余弦矩陣的行向量正是導航系的軸向量在載體系的投影,如圖1所示,姿態矩陣可以表示為:
(6)
其中,E,N,U分別為導航系x,y,z軸單位矢量在載體系下的投影,其中行向量元素代表該向量與載體系各軸向量的夾角余弦。
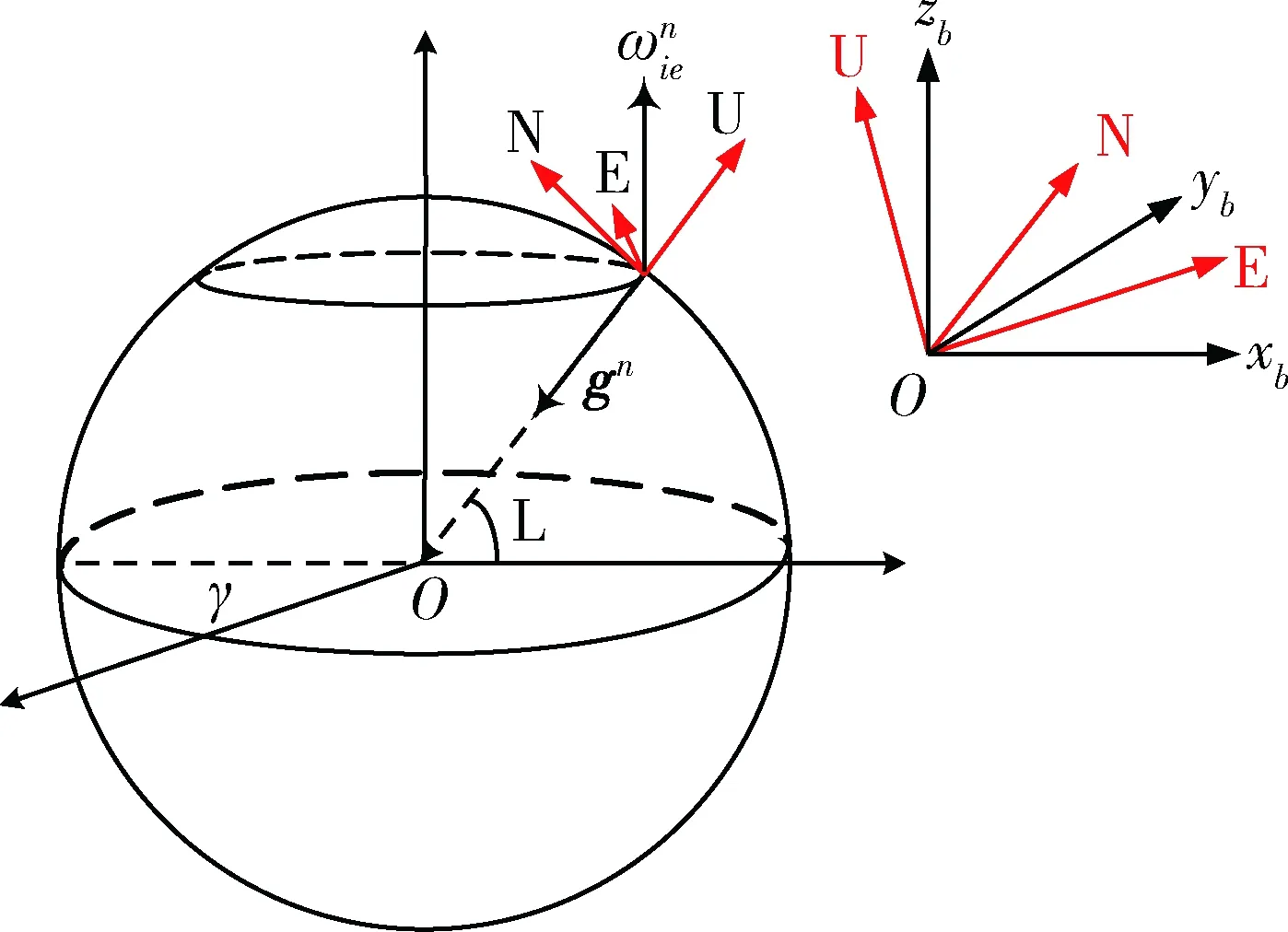
圖1 方向余弦矩陣的正交基關系
2.2 直接解析對準方法
式(6)說明,只需求取導航系正交基在載體系的投影,即可確定姿態矩陣,該方法稱為基于正交基構建的直接解析對準方法。由圖1可以看出,在導航系下,“東北天”軸向標準正交基構成的單位陣可表示為:
(7)
其中,||表示對矢量取模。因此,靜基座下載體坐標系下各軸向矢量的投影構成的姿態矩陣即可通過式(8)求取:
(8)
不難發現,式(8)僅利用了加速度與陀螺的觀測矢量,無需緯度值。同時,各行向量均為單位向量且相互正交,無需再額外進行正交化處理,更具實用性。
2.3 與傳統解析法的統一關系
式(1)中,M矩陣展開后可表示成:
(9)
將其代入式(1)可重新寫為:
(10)
顯然,矩陣M的作用有:1)矩陣N進行行變換;2)矩陣N行矢量取單位模。對比式(8)與(10),不考慮誤差條件下有:

2.4 誤差分析
(11)


(12)
式中,▽b,εb分別為加速度計與陀螺的常值誤差。根據式(11)有:
(13)
將式(12)其代入(13),得到:
(14)
最終解算得到:
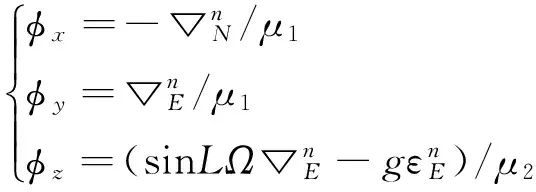
(15)
不考慮矢量模誤差時,有μ1=g,μ2=gΩcosL。此時,式(15)與解析對準方法的對準誤差關系式相同[8]。下面重點分析矢量模誤差對精度的影響。以加速度計觀測模為例,根據模解算關系:

(16)
忽略誤差二階小量有:
對式(16)泰勒展開后可得:
1/μ1=[1-δfb/(2g2)]/g
(17)
以加速度計誤差為1000μg為例,則δfb/(2g2)=0.001,矢量模誤差形成的姿態誤差為0.2″,顯然,誤差分析中可以忽略模觀測誤差的影響。另外,在IMU出廠前基本都需要進行矢量模標定,因此實際應用中可無需考慮矢量模誤差的影響。
3 實驗分析
3.1 仿真實驗
仿真中設陀螺儀常值漂移為0.1(°)/h,隨機漂移0.01(°)/h;加速度計零偏為1000μg,隨機噪聲為100μg;器件刻度系數誤差均為50ppm,安裝誤差為5″。蒙特卡洛仿真次數設為100次,仿真步長設為0.01s,以靜止基座100s的加速度計、陀螺數據為基礎,采用平均濾波后分別采用式(1)與(8)的對準方法,對準解算誤差統計結果如表1所示。從結果可發現,2種解析式的對準方法在精度上幾乎沒有差別,說明了在仿真中采用直接解析法時由常值誤差和隨機誤差形成的模觀測誤差及緯度估計誤差對精度影響十分微小,與誤差分析結果是吻合的。
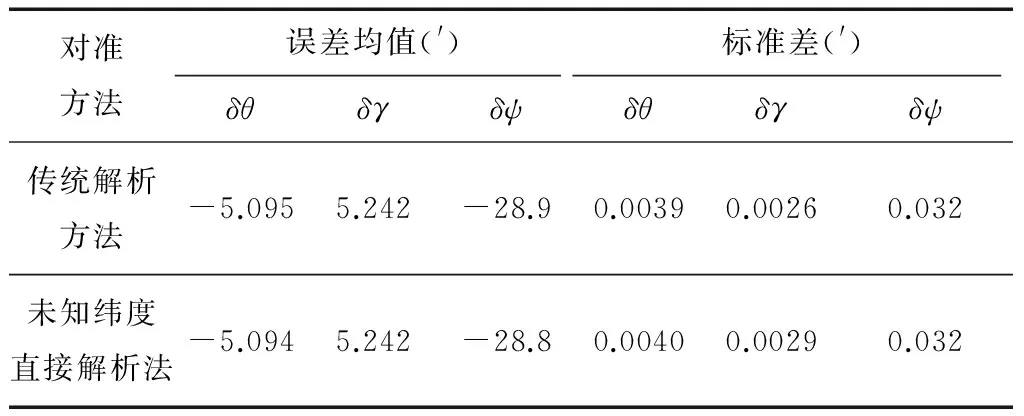
表1 2種解析式對準仿真實驗精度比較
3.2 IMU數據解算實驗
以自研光纖捷聯慣導系統輸出數據為仿真對象,系統采用陀螺的零偏穩定性優于為0.01(°)/h,加速度計零偏穩定性優于50μg。實驗平臺采用3KTD-565型三軸多功能轉臺,轉臺測角精度為3″,測角分辨率為0.36″,轉臺可實時輸出臺體真實姿態。實驗采集時間為1h,靜止狀態下IMU輸出數據,采用標定模型得到陀螺、加速度計標準單位輸出,仍然選取100s數據的平均作為解算,進行20次對準解算,解算統計結果如表2所示。結果表明,實際系統中慣性器件誤差特性雖較為復雜,但2種解析方法精度相當,因此,在實際工程應用中采用本文解算方法,無需緯度信息仍可獲得同樣的對準精度。
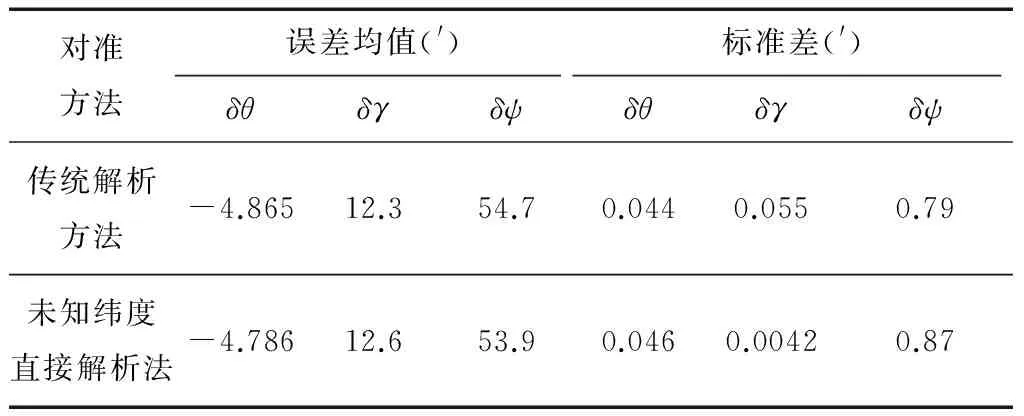
表2 2種解析式對準IMU數據解算精度對比
4 結論
在靜止基座下可利用觀測量直接建立東北天軸系在載體系下的投影,以此建立方向余弦矩陣,該方法是一種無需緯度支持的解析式對準方法,分析論證了該方法與傳統解析對準方法在解析關系上的統一性,誤差分析與實驗均證明了該方法在精度上與傳統方法是一致的,也表明了靜基座下捷聯慣導對準可不依賴緯度信息進行,且精度不受影響。
[1] 茹書山,趙忠華.基于逆向算法的捷聯羅經快速對準技術研究[J].電子測量技術,2011,34(1):234-237.(Ru Shushan,Zhao Zhonghua.Study on Fast Alignmentmethod of Strapdown Gyrocompass Based on Converse Algorithm[J].Electronic Measurement Technology,2011,34(1): 234-237.)
[2] 高薪,卞鴻巍,傅中澤,等.捷聯慣導晃動基座四元數估計對準算法[J].慣性技術學報,2014,22(6):724-728.(Gao Xin,Bian Hongwei,Fu Zhongze,et al.Alignment Algorithm Based on Quaternion Estimator for SINS on Rocking Base[J].Journal of Chinese Inertial Technology,2014,22(6):724-728.)
[3] Wu Y, Pan X. Optimization-based in-flight Alignment for Airborne INS/GPS Applications [C]://Proc.IGNSS Symp.Sydney, Australia,2011.
[4] 秦永元,嚴恭敏,顧冬晴,鄭吉兵.搖擺基座上基于信息的捷聯慣導粗對準研究[J].西北工業大學學報,2005,23(5):681-683.(Qin Yongyuan,Yan Gongmin,Gu Dongqing,Zheng Jibing. A Clever Way of SINS Coarse Alignment Despite Rocking Ship[J].Journal of Northwestern Polytechnical University,2005,23(5):681-683.)
[5] 陳令剛,劉建業,孫永榮,等.微小型捷聯慣導系統解析式對準方法研究[J].航天控制, 2005, 23(4): 9-12. (Chen Linggang,Liu Jianye,Sun Yongrong, et al.Study of Analytic Coarse Alignment Methods to Micro SINS[J]. Aerospace Control,2005, 23(4): 9-12.)
[6] 嚴恭敏,嚴衛生,徐德民,等.緯度未知條件下捷聯慣導系統初始對準分析[J].航天控制,2008,26(2):31-34. (Yan G M,Yan W S,Xu D M, et al.SINS Initial Aligment Analysis Under Geographic Latitude Uncertainty[J].Aerospace Control,2008,26(2):31-34.)
[7] 魏春嶺,張洪鉞.捷聯慣導系統粗對準方法比較[J].航天控制,2000,18(3):16-21.(Wei Chunling,Zhang Hongyue.Comparison of Analytic Coarse Alignment Methods[J]. Aerospace Control, 2000,18(3):16-21.
[8] Error Analysis of Analytic Coarse Alignment Methods[J].IEEE Trans on Aerospace and Electronic Systems 1998,34(1):334-337.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56