基于降階ESO的微小型空地導彈滾轉變結構控制
2018-04-02 02:10:14鐘高偉陳東生王明光
航天控制 2018年1期
關鍵詞:設計
鐘高偉 陳東生 王明光
北京航天微系統研究所,北京100094
現代及未來戰場無人機攜帶攻擊型微小型空地導彈已成趨勢,為了進一步提高作戰能力及打擊精度,配備捷聯、框架式導引頭的微小型空地導彈需在投彈后極短時間內將滾轉角穩定在0°范圍左右,以防止導引頭輸出目標信息不準確;另一方面,滾轉角穩定控制能減少姿態三通道間的強耦合,進一步提高制導精度。
對于彈翼展弦比小的軸對稱微小型空地導彈來說,其滾轉轉動慣量很小,由其結構特性進一步計算可知,滾轉通道被控對象的時間常數及增益很小,導致采用基于二回路的經典控制論的滾轉通道魯棒及抗擾能力差。此外,復雜多變的飛行環境帶來的模型高度不確定性及外部陣風干擾,以及自身內部強擾動等因素的存在,使得應用經典控制論或其改進型更加力不從心,很難滿足工程所需的控制要求。
各國對此類微小型導彈的控制技術處于保密封鎖階段,微小型導彈滾轉控制的研究文獻并不多。但是,常規型空地導彈如BTT導彈滾轉控制研究已取得一定的研究成果,不妨可以將其作為參考。目前在國內研究中,文獻[1]中,宋金來等人采用自抗擾技術中核心思想ESO,利用觀測器將系統的總和擾動估計,并進行實時補償,簡化了被控對象,方便后續PD控制器設計;文獻[2-3]中,研究人員將神經網絡分別與自適應及動態逆等魯棒控制相結合,改善了控制的動態性能,既減弱了模型不確定性也削弱了神經網絡對跟蹤誤差帶來的不利影響;文獻[4-5]中,研究人員利用模型參考自適應魯棒控制及模糊算法智能控制去優化變結構控制,改善其抖振現象及平衡點收斂慢等缺點,能保證快速響應且穩定跟蹤指令;文獻[6-7]中,楊軍等提出參數空間法設計準則將其應用并設計出制導炸彈滾轉通道控制器,實現大動壓范圍內制導炸彈穩定控制,具有良好的魯棒性。在國外研究中,文獻[8-9]中,Huang S J等借助神經網絡逼近設計了基于REF網絡的滑模控制器,Zhang C F等采用遺傳算法進行切換函數的優化,將抖振的大小作為優化適應度函數的重要指標,構造了抖振最小的切換函數。
魯棒控制復雜的控制公式難以編程應用,傳統變結構控制中抖振及奇異問題使得執行機構如舵機等易于損壞;智能控制的應用雖然減弱了不確定性,優化了控制參數,但是其離線計算及較為復雜的迭代過程限制了工程實時計算的要求;參數空間法等現代控制論不具備整套完整的穩定裕度分析及經典控制論的魯棒及抗擾能力差。基于以上原因,本文結合降階ESO[10-11]及非奇異終端滑模變結構控制,提出一種復合控制方法來實現閉環系統誤差有限時間收斂,提高其魯棒性及抗干擾能力,并有效減弱抖振。首先,采用非奇異滑模面設計變結構控制器能使系統在有限時間內穩定,特別是在平衡點具有更好的收斂性能,保持較好的參數攝動抑制能力;其次,利用降階ESO對被控對象未建模內擾及外部干擾實時估計,將估計值作為前饋量補償給控制輸入端,以此削弱未建模部分及干擾帶來的抖振;采用基于超螺旋算法的魯棒微分器[12]處理指令信號,既作為濾波器也為微分器,便于工程實現。
1 滾轉通道數學模型
導彈滾轉姿態動力學方程[13]可簡化表示為
(1)
式中,Jx,Jy和Jz分別為滾轉、偏航和俯仰的轉動慣量;ωx,ωy和ωz分別為彈體角速度在彈體坐標系中的分量;q為動壓;Sref為彈體參考面積;Lref為參考長度;mx為滾轉力矩系數。
令滾轉力矩為Mx=mxqSrefLref,則由氣動特性及結構特征,可具體表征為
(2)
(3)

(4)
式中,b11為滾轉阻尼系數;b17為滾轉舵效系數;b18ΔM可視為內部總和擾動。
根據線性關系,滾轉舵到滾轉角速度的傳遞函數為
(5)
2 微小型空地導彈滾轉特性分析
空地導彈由長度及重量常分為大型、中型、小型及微小型,本文研究對象是微小型空地導彈,以某具體研制型號為背景,氣動外形為軸對稱正常式布局。通常來說定義微小型導彈彈體長度小于1.5m,重量低于15kg,這與其余類型同氣動外形的彈體在動力學模型上保持一致,且氣動參數可視為一致,差異在于結構特性的不同,即轉動慣量Jx,氣動參考長度Lref及氣動參考面積Sref。故計算出的模型參數b17和b11數值差異明顯,依據經典控制理論設計的控制參數也會有所不同,以例1為特征點具體分析。
2.1 被控對象模型對比


表1 氣動、結構參數
將模型參數代入式(5)可以得到2者傳遞函數分別為
2.2 經典PID設計
通常微小型空地導彈滾動控制回路一般采用二回路姿態控制,如圖1所示,即內回路是角速率反饋的阻尼回路,其反饋系數為Kω;外回路采用基于角位置反饋的控制回路,為了使控制回路具有充裕的裕度及較好的控制品質,控制器采用“比例控制為主,積分控制為副”的控制策略,即PI控制。
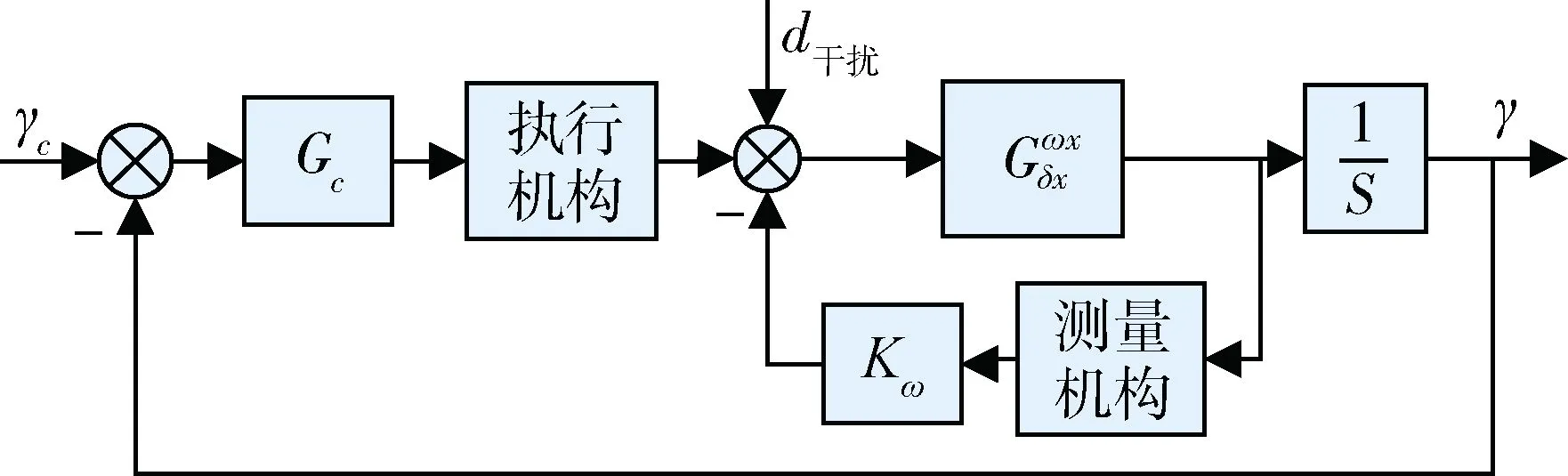
圖1 PI控制回路圖
根據反饋控制理論,Kω越大,越能抑制被控對象的不確定性和外部擾動對控制品質的影響,其設計原則是在控制裕度允許的情況下,Kω盡可能取較大的值。Kω的上限取決于滾轉控制回路的帶寬,設控制回路的截止頻率為ωc,則
(6)
采用例1設計控制回路,設計外回路的截止頻率為4rad/s,由設計原則得阻尼回路Kω分別為0.0014和0.0342。忽略測量機構,得到內回路阻尼回路的傳遞函數
Kω=0.0014;
Kω=0.0342;
由上式可知,阻尼反饋系數Kω相差近24倍。繼而設計并調試出前向串聯PI控制參數,滿足階躍響應的穩定性和快速性要求,得到PI參數,見表2。

表2 PI控制參數
2.3 微小型導彈的“怪異”表現
基于二回路的控制回路設計完畢后,通過計算及仿真,可以得到兩者開環頻率特性如表3所示,時域響應由圖2所示。
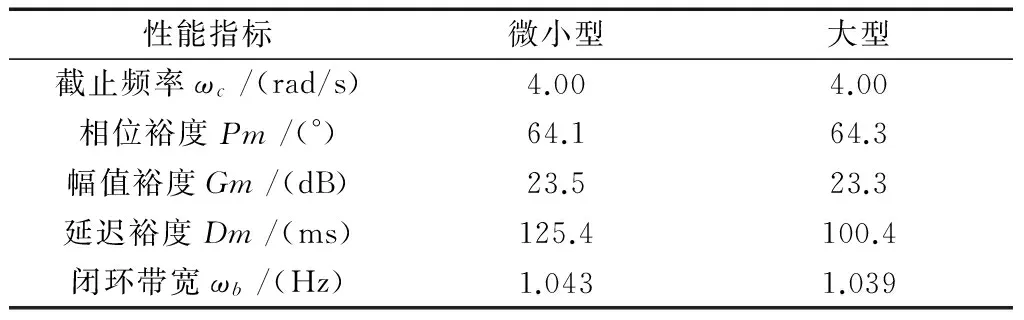
表3 穩定裕度
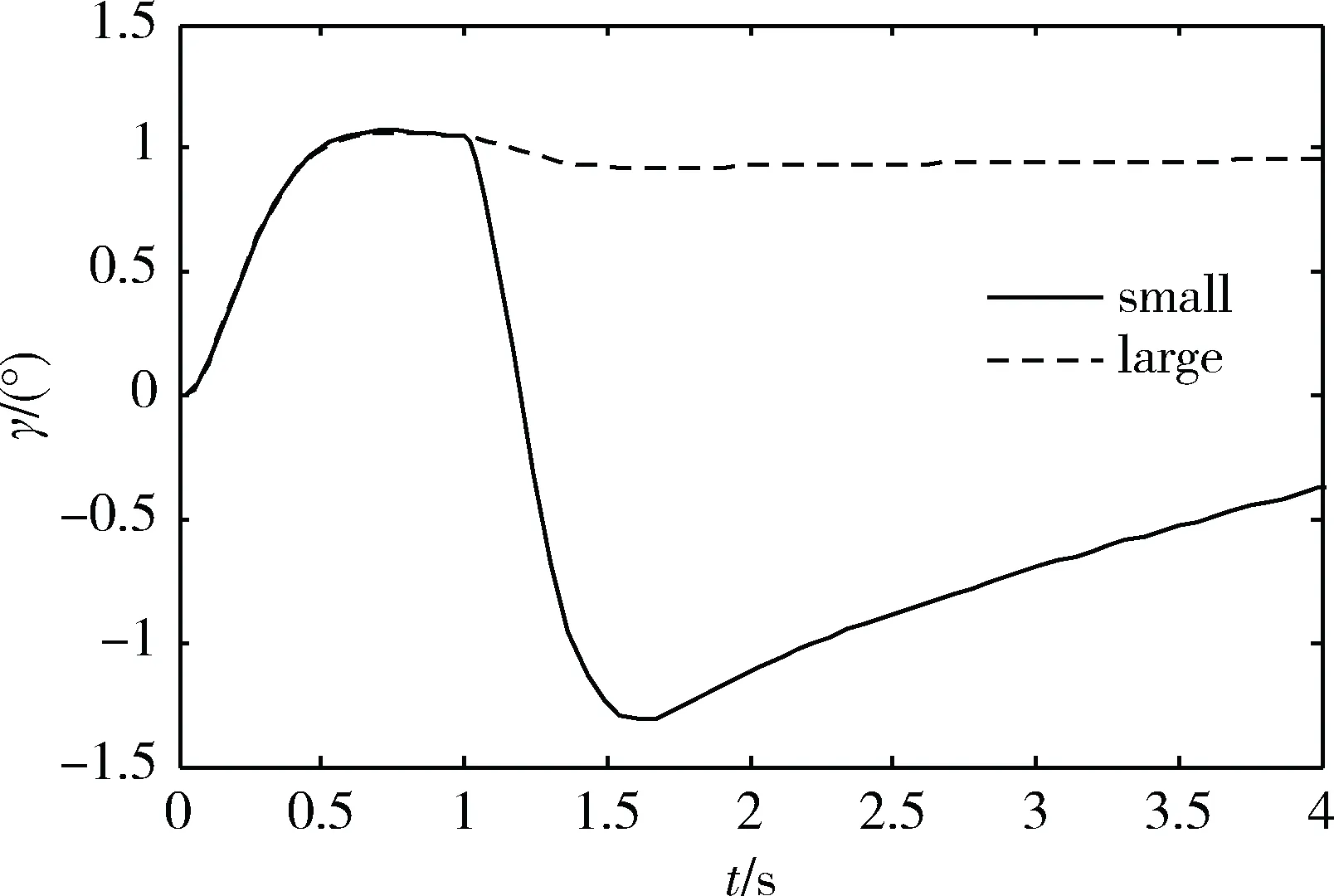
圖2 滾轉角響應
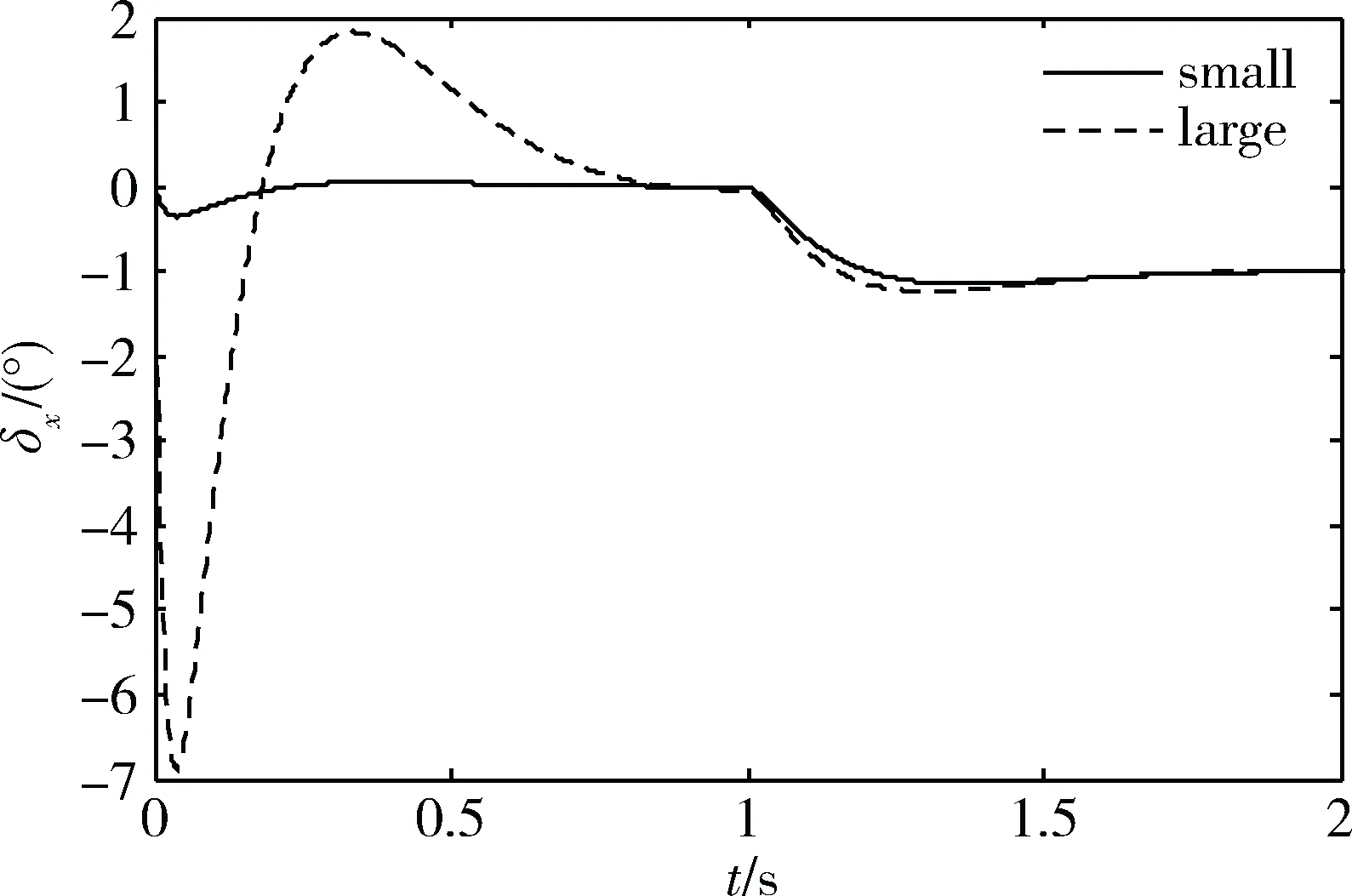
圖3 滾轉舵偏
當彈體在1s后受到一個相當于1°滾轉量級的干擾力矩時,其閉環階躍響應如圖2所示,兩者控制舵偏變化如圖3所示。由此可以看出,設計并調試出的參數在滿足控制系統穩定裕度指標的前提下,使得兩者的閉環傳遞函數一樣,故兩者開環的截止頻率、相位裕度以及幅值裕度幾乎完全一致,其差別在于微小型導彈的3個控制參數取值較常規型導彈小得多,尤其是Kω反饋阻尼參數。由反饋控制論可知,阻尼參數小,抑制不確定性及抗擾動能力弱。因此,在未出現干擾,時微小型導彈和常規型導彈在響應指令信號能力上幾乎一樣,一旦出現外界的擾動,微小型導彈大幅脫離指令信號,而常規型導彈能快跟蹤上指令信號。
3 非奇異終端滑模變結構控制器
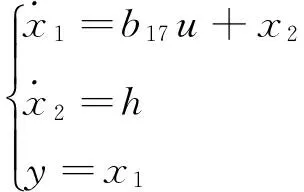
由式(4)簡化并忽略耦合影響,得到滾轉二階模型
(7)
式中,x1為滾轉角;x2為滾轉角速度;u為控制舵偏量即δx。由于b11ωx自身阻尼項數值小且難以得到精確值,故將其并入內部干擾項b18ΔM中。在外界干擾存在的情況下,將內外復合干擾表示為d(t)。

(8)
式中,β1>0,1<α=a/b<2,且a,b為奇數。
(9)
式中,k>0,σ>0,0<η<1。
由式(7)~(9)得到控制律為

(10)
由式(10)可知,系統未建模部分、內部擾動及外界干擾在d(t)中得以體現。因此,如何快速估計出d(t)是控制器設計的關鍵。
4 降階ESO設計
由文獻[10]及文獻[11]可知,在某些狀態量可測的情況下,線性降階ESO更為實用,與非線性ESO相比,結構簡單,其中的參數與實際工程中的帶寬概念相匹配,這非常有利于參數的調試與系統帶寬的匹配。
考慮微小型導彈滾轉通道滾轉角可測,將式(7)改寫為
(11)
式中,x1為滾轉角速度;x2為復合干擾d(t)。
由文獻[10]可知,結合式(11),得到滾轉通道的降階ESO設計式
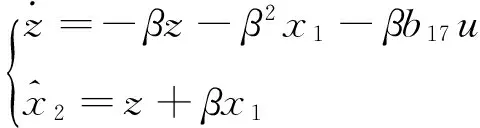
(12)

對式(11)和(12)進行拉式變換,化簡可得
(13)
由此可見,降階ESO可以視為一階慣性環節,其時間常數β-1即為觀測器帶寬。通過選擇合理的β搭配系統閉環帶寬滿足工程要求。
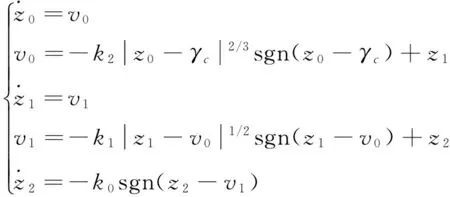
5 基于超螺旋算法的魯棒微分器
由于采用非奇異終端滑模控制,設計的滑模面以及得到的控制量需要輸入的指令信號的一階、二階微分,且還能對輸入信號進行濾波,故采取魯棒微分器[12]的方式滿足此要求。魯棒微分器既可以作為觀測器使用也可以作為微分器使用。
(14)

6 閉環系統穩定性分析
降階ESO及控制器設計完畢后,在指令信號輸入端加入魯棒微分器,得到整個閉環回路控制圖,見圖4。
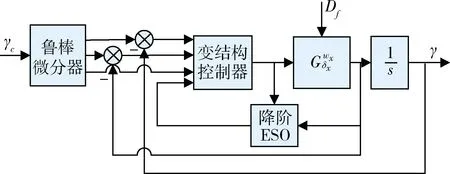
圖4 復合控制結構圖
(15)
將式(10)代入式(15),可得

(16)
為了說明閉環的穩定性,給出如下假設和定理。
假設1 假設d(t),即d(t)是有界的并存在一個常數D>0,則有|d(t)|≤D。
定理1 若假設1滿足,且合理選擇降階ESO的增益β1,那么觀測器的誤差e0指數收斂并且有界,且收斂域為
式中,ωc為觀測器帶寬,其值等于β1。
考慮降階ESO式(12)、滑模面式(8)與控制量式(10)作用下閉環系統的收斂特性。針對滾轉通道式(7),構造如下的正定Lyapunov函數
(17)
對式(17)求導,可得

(18)
又有-ks2≤0,所以上式可改寫為
(19)
隨著t→∞,s→0,e0收斂到0,且β1>0,α>1,k>0,σ>0,η>1,式(19)變為
(20)
滿足滑模面到達條件,因而閉環控制系統穩定。
由有限時間穩定定理可知,隨著V的減小,閉環系統的軌跡滿足
(21)
且能在有限時間收斂到滑模面鄰域。同時,有限收斂的時間可表示為
(22)
綜上所述,在降階ESO穩定的情況下,通過調試控制參數k,σ,α,可以保證系統的軌跡在有限時間內收斂于s=0的鄰域內,即狀態量x1滾轉角能跟蹤上指令滾轉信號,但存在穩態收斂誤差。穩態誤差的誤差收斂域與觀測器的誤差存在正比關系。
7 數值仿真
通過與經典控制設計滾轉通道控制器即二回路控制法進行對比。首先,選取例1條件為特征點,進行非奇異變結構控制器及降階ESO的調參。選取一組合適參數:魯棒微分器中C=5,k0=1.1C,k1=4C1/2,k2=8C1/3;降階ESO中β=10;非奇異變結構控制器中k=18,σ=5,η=0.5,β=0.1,α=17/15。定義式(6)中內部總和干擾為f=5sin(t),并在5~10s內加入一個近似1°的滾轉干擾力矩。另外,仿真時給系統加入50ms的延遲,以此測試控制回路抗延時特性。
由圖5~6可知,魯棒微分器能滿足微分、濾波及觀測的作用,但是在噪聲污染較為嚴重時,其二階微分信號變得很差,存在嚴重的相位滯后現象,且微分及濾波效果對參數較為敏感,參數的改變不光影響估計精度,而且還會給系統帶來延時。
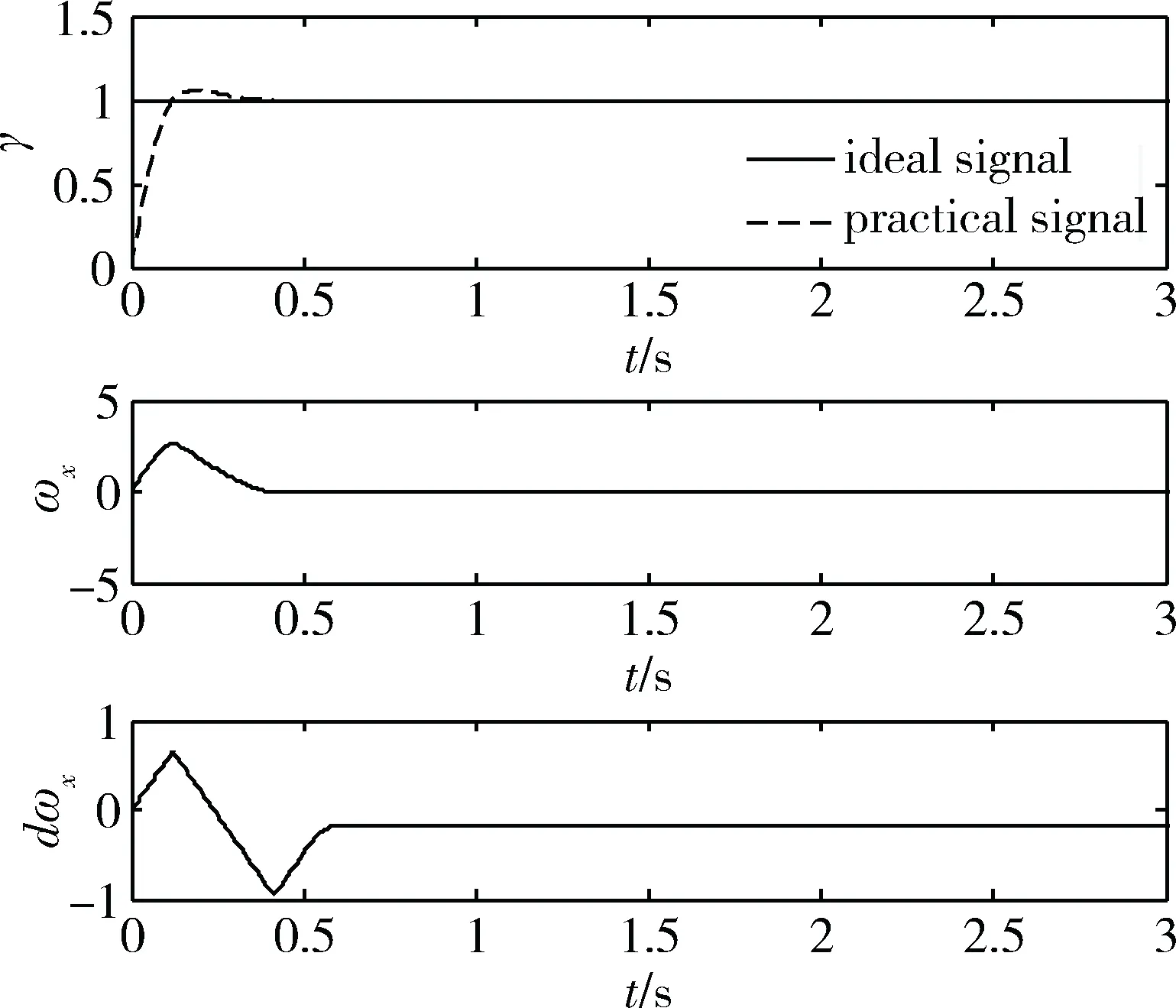
圖5 無噪聲污染估計信號
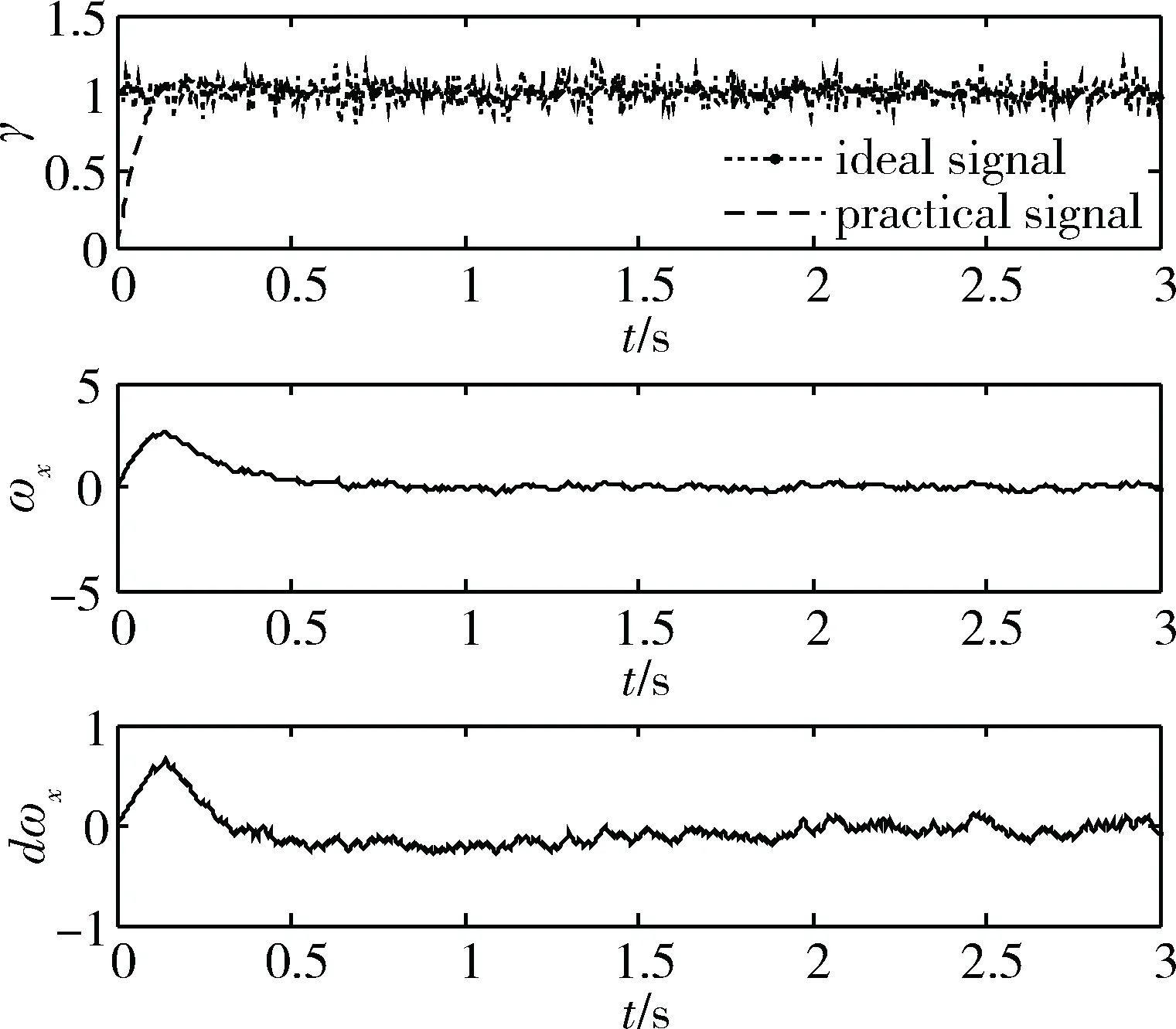
圖6 噪聲污染估計信號
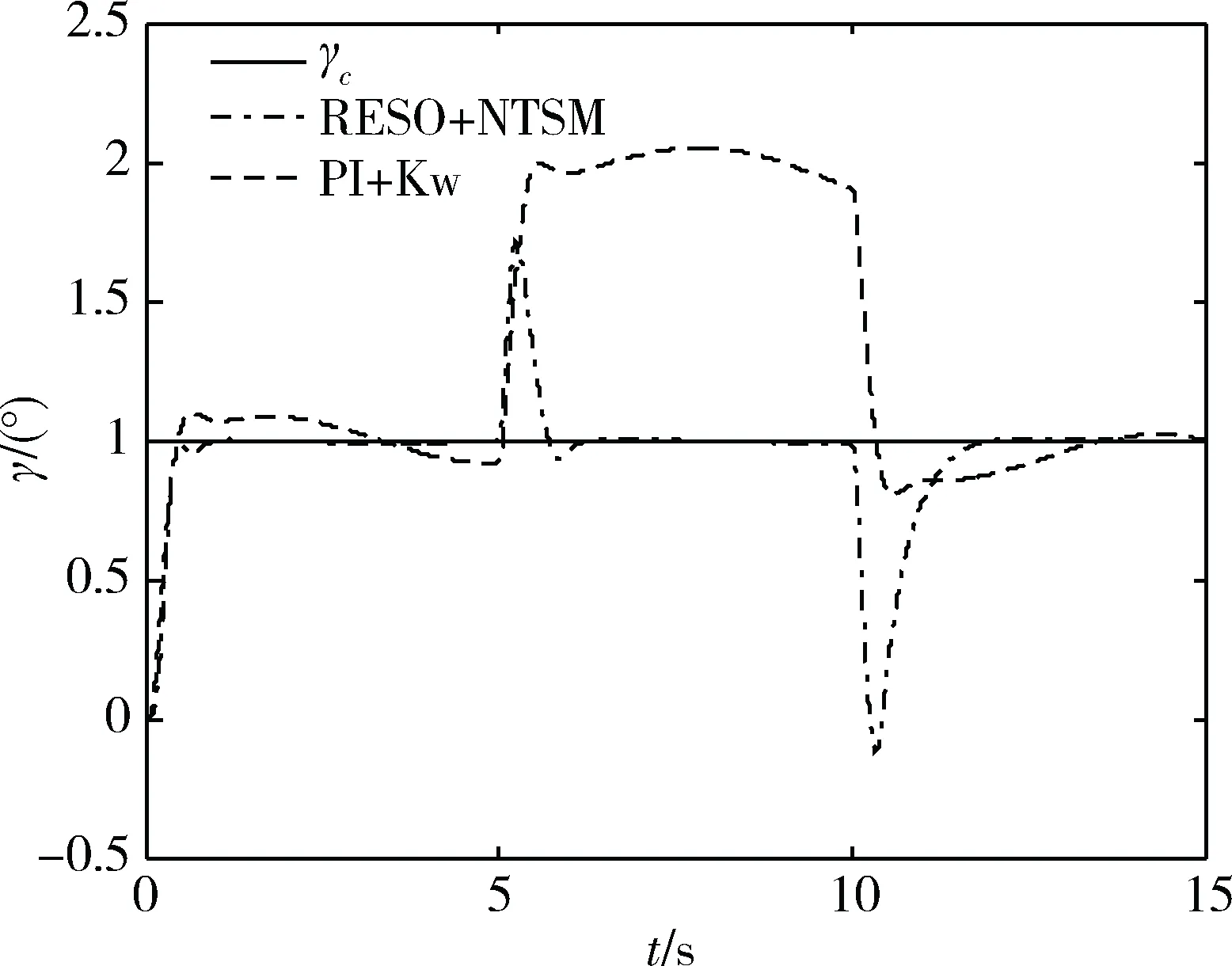
圖7 滾轉角響應
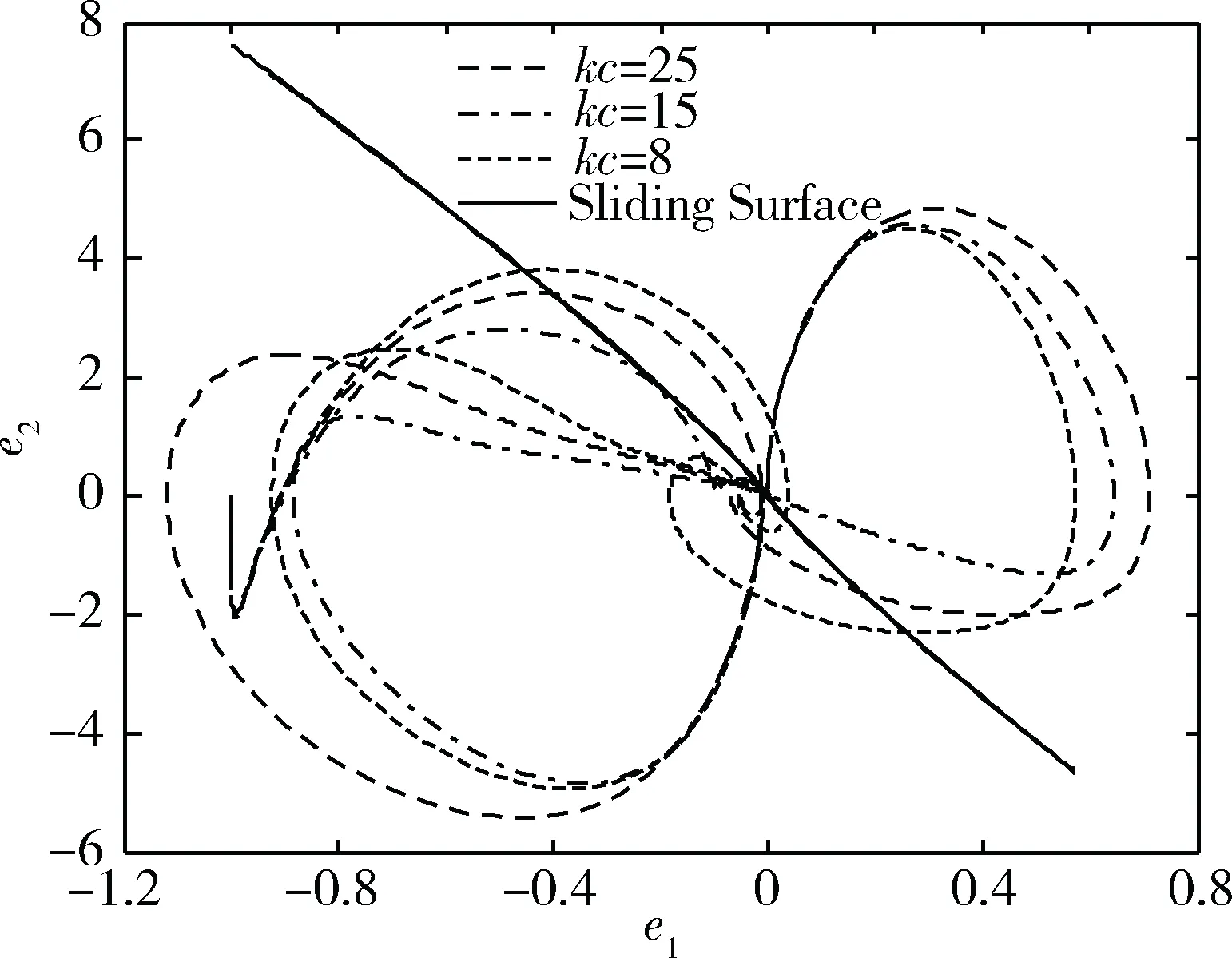
圖8 不同kc值下指數趨近律相軌跡趨近過程
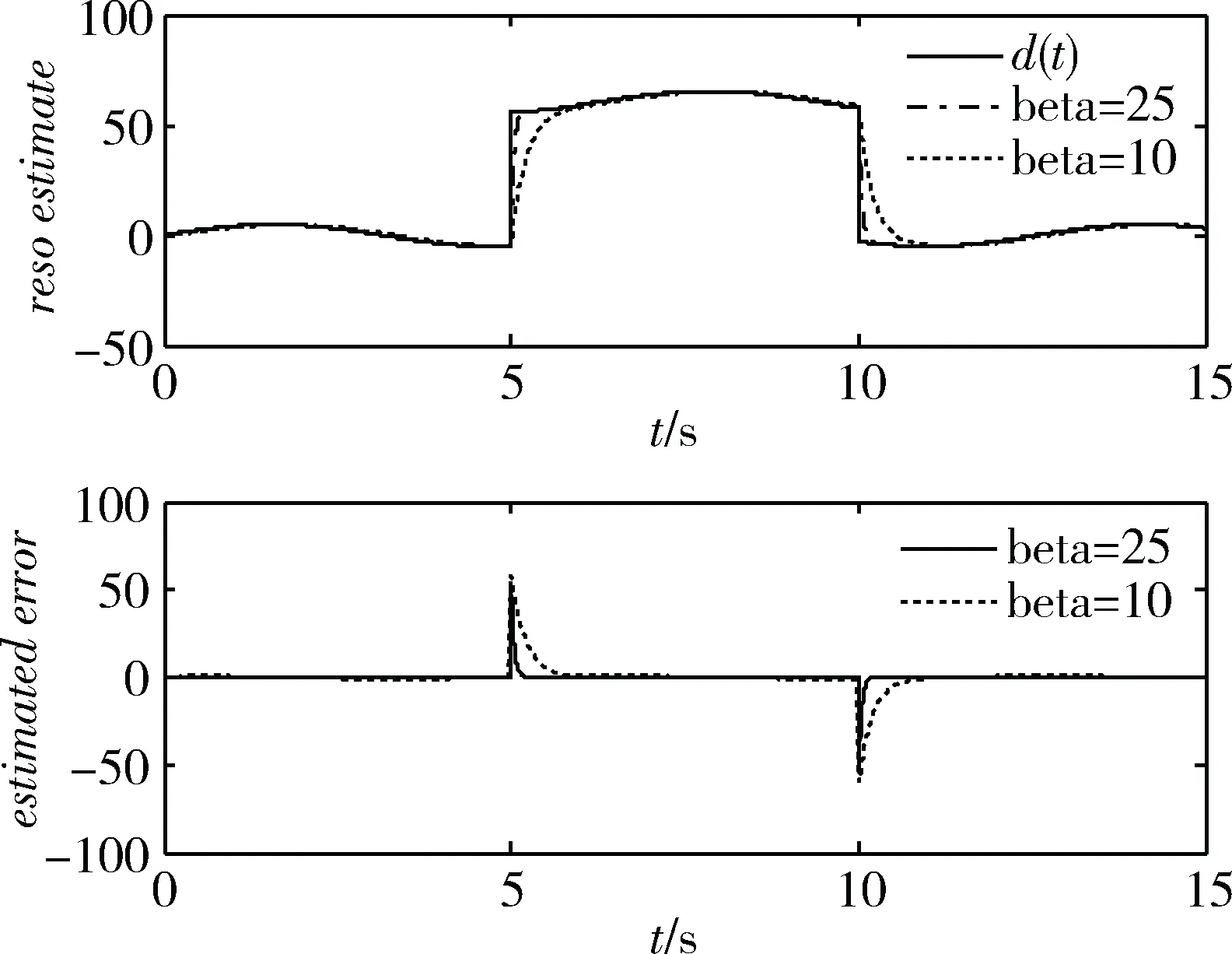
圖9 降階ESO估計“總和干擾”
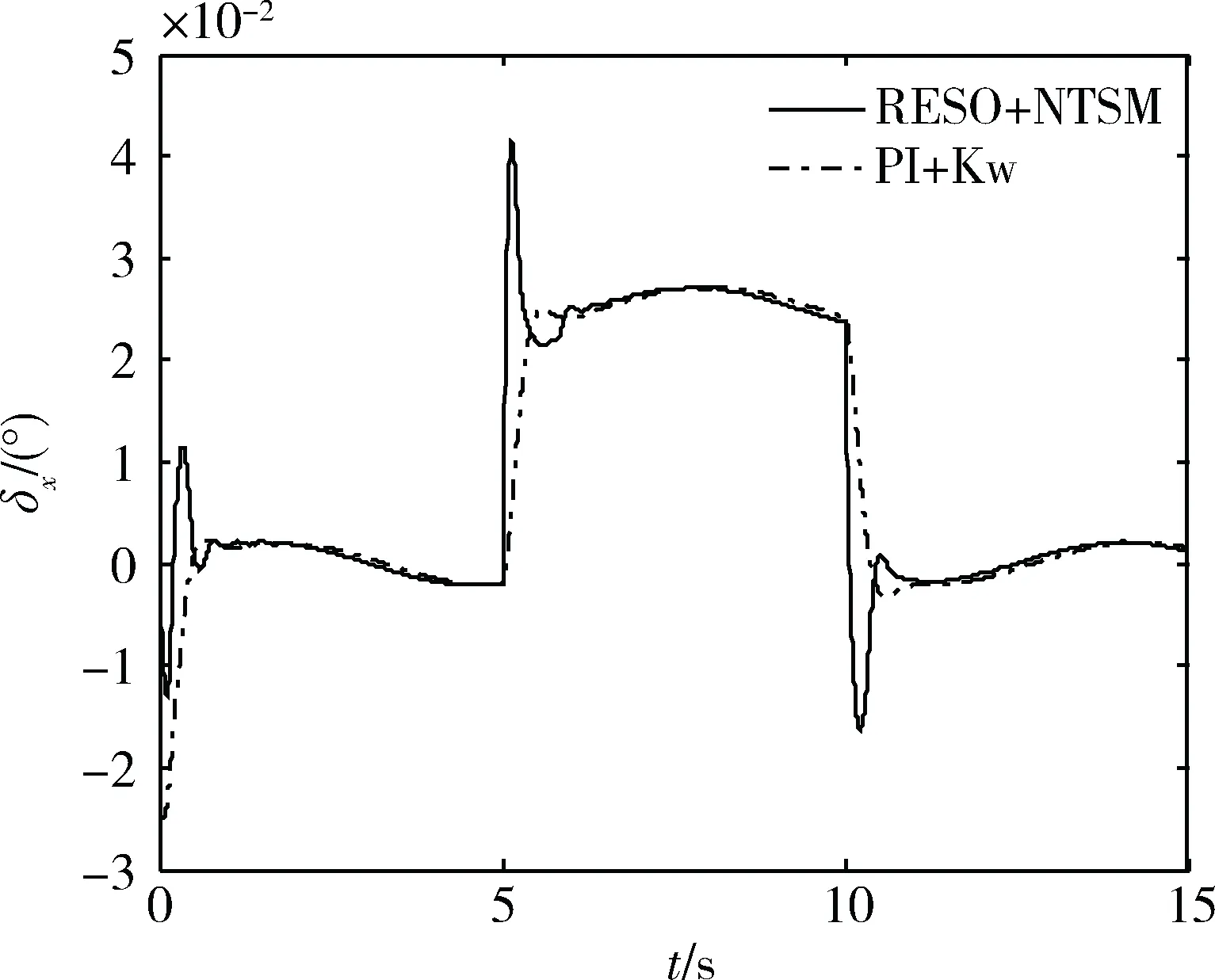
圖10 控制舵偏量
由圖8可知,滑模面中k的不同取值會影響滑模收斂時間及收斂過程,但最終狀態都會收斂到滑模面0點平衡處,相較于傳統的非奇異終端滑模控制,具有快速收斂特性,且通過圖10可知,控制量在平衡點處抖振現象得到抑制。圖9顯示選擇合理的參數,降階ESO能很好地估計出“復合干擾”,觀測器帶寬及精度隨著參數增大而增大,但是參數的增大也會給系統帶來延遲、相位滯后,使得系統穩定性降低。由圖7~10可知,經典控制論設計出的控制器在未出現干擾時,穩定裕度及響應指標都滿足設計要求,但是一旦出現外界干擾和內部擾動,控制器性能急劇下降,近乎無抗干擾能力。對于智能控制結合滑模變結構的控制方法,從本質上來說,只是出于優化參數及降低抖振現象而存在,并未提升系統魯棒及抗擾動性。因此,本文的核心降階ESO的存在使得復合干擾得以估計并補償入控制輸入端,再進而采用變結構控制使得對象能夠短時間內跟蹤上指令信號,且抑制模型參數不確定性攝動。另外,由圖10中可看出復合控制能迅速給出平穩控制舵偏量,以此來控制舵面偏轉,抖振現象也得以抑制。
8 結論
針對微小型空地導彈滾轉通道在經典控制論設計出的控制器下出現的局限性,設計了基于降階ESO的非奇異終端滑模變結構控制方法。首先,采用降階ESO估計出系統的“復合干擾”,并將其實時補償到控制輸入端。其次,設計非奇異終端滑模控制能夠保證系統穩定跟蹤指令,且跟蹤誤差能在有限時間內收斂。兩者結合形成的復合控制,不僅能穩定跟蹤指令信號、抑制參數不確定性攝動以及提升系統抗干擾能力,而且變結構控制伴隨的抖振現象也得以抑制。
[1] 宋金來,金岳. 制導炸彈滾轉通道自抗擾控制設計方法研究[J]. 航天控制,2014,32(11):26-39.(Song J L,Jin Y. Research of Active Dsiturbance Rejection Control for Guided Missile Control[J]. Aerospace Control. 2014,32(11):26-39.)
[2] 黃樹彩,李為民. BTT導彈的神經網絡自適應非線性自動駕駛儀設計[J]. 宇航學報,2007,(5):1232-1234.(Huang S C,Li W M. Design of Neural-Adaptive Nonlinear Autopilot for BTT Missile[J]. Journal of Astronautics,2007,(5):1232-1234.)
[3] 楊志峰,雷虎民,李慶良,李炯. 基于RBF神經網絡的導彈魯棒動態逆控制[J]. 宇航學報,2010,(10):2296-2301.(Yang Z F,Lei H M,Li Q L,Li J. RBF Neural Network Based Robust Dynamic Inverse Control for a Missile[J]. Journal of Astronautics,2010,(10):2296-2301.)
[4] 湯柏濤,董斌,于云峰. BTT導彈滾轉通道模型參考變結構自動駕駛儀設計[J]. 計算機測量與控制,2011,(1):105-107.(Tang B T,Dong B,Yu Y F. Autopilot Design for BTT Missile Based on Mode Reference Variable Structure Control[J]. Computer Measurement & Control,2011,(1):105-107.)
[5] 梁卓,薛曉中,孫瑞勝,王航. 制導炸彈模糊變結構滾轉自動駕駛儀設計[J]. 戰術導彈技術,2010,(3):78-82.(Liang Z,Xue X Z,Sun R S,Wang H. The Design of Guided Bomb Fuzzy Variable Structure Rolling Autopilot[J]. Tactical Missile Technology,2010,(3):78-82.)
[6] 楊軍. 參數空間方法與飛行控制系統[M]. 北京:航空工業出版社,2008.(Yang J. Parameters Space Methods and Flight Control Systems[M]. Beijing:Aviation Industry Press.)
[7] 許友竹,凡永華. 制導炸彈滾轉通道控制方法研究[J]. 科學技術與工程,2012,(1):526-529.(Xu Y Z,Fan Y H. Research on Control Methods of Guided Bomb Rolling Channel[J]. Science Technology and Engineering,2012,(1):526-529.)
[8] Huang S J,Huang K S,Chou K C,Development and Application of Novel Radial Basis Function Sliding-mode Controller[J]. Mechatronics,2003(13):313-329.
[9] Zhang C F,Wang Y N,He J,GA-NN-Integrated Sliding Mode Control System and Its Application in the Printing Press[J]. Control Theoty & Applications,2003,20(2):217-222.
[10] 韓京清. 自抗擾控制技術[M]. 北京:國防工業出版社,2013.(Han J Q. Active Disturbance Rejection Controler,ADRC[M]. Beijing:National Defense Industry Press,2013.)
[11] 薛文超. 自抗擾控制的理論研究[D]. 北京:中國科學院研究生院,2012.(Xue W C. Theoretical Study on Active Disturbance Rejection Control[D]. Beijing:Graduate University of Chinese Academy of Sciences,2012.)
[12] Levant A. Robust Differentiation via Sliding Mode Technique[J]. Automatica,1998,34(3).
[13] 錢杏芳,林瑞熊,趙亞男. 導彈飛行力學[M]. 北京:北京理工大學出版社,2012.(Qian X F,Lin R X,Zhao Y N. Missile Flight Aerodynamics[M]. Beijing:Beijng Institude of Technology Press,2012.)
[14] 劉金琨. 滑模變結構控制MATLAB仿真基本理論與設計方法[M]. 北京:清華大學出版社,2015.(Lin J K. The Design Method of Sliding Mode Variable Structure Control Matlab Simulation[M]. Beijing:Tsinghua University Press,2015.)
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04