基于運(yùn)動(dòng)數(shù)據(jù)的仿生壓曲模型設(shè)計(jì)方法*
2018-04-03 02:03:19李少波璩晶磊
組合機(jī)床與自動(dòng)化加工技術(shù) 2018年3期
關(guān)鍵詞:動(dòng)作
韋 唯,李少波,璩晶磊
(1.貴州大學(xué) 機(jī)械工程學(xué)院,貴陽(yáng) 550025; 2.中科院成都計(jì)算機(jī)應(yīng)用研究所,成都 610041)
0 引言
隨著現(xiàn)代機(jī)械裝備業(yè)的發(fā)展,我國(guó)白酒制曲也在上世紀(jì)70年代前后逐步的以機(jī)械制曲取代了人工踩曲的生產(chǎn)方式[1]。國(guó)內(nèi)許多廠家也對(duì)壓曲機(jī)進(jìn)行了研制,我國(guó)現(xiàn)使用的機(jī)械制曲壓塊機(jī)可歸納為以下三種類型:液壓式壓曲機(jī)、氣動(dòng)式壓曲機(jī)、機(jī)械沖壓式壓曲機(jī)[2]。各酒廠普遍使用機(jī)械沖壓式壓曲機(jī)。山西榆次輕工機(jī)械廠的汾酒公司大曲車間在使用的七次壓縮一次頂出的壓曲機(jī);四川宜賓岷江機(jī)械制造有限責(zé)任公司研制開(kāi)發(fā)的四次壓制成型液壓壓曲機(jī);河南商丘市睢陽(yáng)區(qū)城北輕工機(jī)械廠的七次壓制成型壓曲機(jī);太原理工大學(xué)和太原市博世通機(jī)電液工程有限公司共同研制的多點(diǎn)式踩曲機(jī)等等[3]。這些設(shè)備壓制的曲塊與人工踩曲的曲塊質(zhì)量還是存在較大差異。由于機(jī)械制曲是通過(guò)直接擠壓成型,凸面表面沒(méi)有人工腳板的打磨,表面較為粗糙、不光滑,在培菌過(guò)程中曲塊內(nèi)部水分容易揮發(fā)散失,曲塊質(zhì)量變得不佳。有研究表明,機(jī)械制曲與人工踩曲相比,機(jī)械制曲影響大曲香氣程度、表面較為粗糙和曲塊外緊內(nèi)松等等[4]。因此,所要解決的技術(shù)問(wèn)題是提供一種保證曲面光滑的成型裝置,通過(guò)運(yùn)動(dòng)捕捉技術(shù)獲取人工踩曲的運(yùn)動(dòng)數(shù)據(jù)等,統(tǒng)計(jì)運(yùn)動(dòng)規(guī)律,建立相應(yīng)的仿生壓曲機(jī)構(gòu),模擬人工踩曲關(guān)鍵動(dòng)作來(lái)解決當(dāng)前主流壓曲機(jī)械的硬壓方式,達(dá)到人工踩制曲塊的感官質(zhì)量要求。本文基于動(dòng)作捕捉技術(shù)提取人工踩曲的關(guān)鍵動(dòng)作信息,并建立踩曲動(dòng)作人體三維模簡(jiǎn)化型,為仿生制曲機(jī)構(gòu)的研制提供理論依據(jù)。動(dòng)作捕捉技術(shù)的數(shù)據(jù)可用于驅(qū)動(dòng)動(dòng)畫(huà)虛擬模型,他被廣泛的應(yīng)用在影視制作、人機(jī)工程學(xué)、運(yùn)動(dòng)訓(xùn)練、醫(yī)學(xué)、生物力學(xué)研究等多個(gè)領(lǐng)域[5]。利用此技術(shù)應(yīng)用于白酒制曲過(guò)程,這將促進(jìn)提高白酒行業(yè)的人工智能水平與生產(chǎn)效率,促進(jìn)實(shí)現(xiàn)中國(guó)白酒行業(yè)釀造機(jī)械化、自動(dòng)化、智能化水平。
1 制曲的特點(diǎn)及需求分析
踩曲講究的是“溜”,其工藝名言是“百腳一坯”。具體的踩制過(guò)程是將拌混均勻的曲面裝入曲盒內(nèi),工人們用腳跟和腳掌將曲料踩壓成型,按先中間后在四邊的順序進(jìn)行踩制。中間先用腳掌踩制,再用腳跟沿著四周進(jìn)行搓踩。四周要踩制得緊密、整齊,中心可略為較松,以防缺邊掉角。大曲制作過(guò)程中,曲坯的踩制是一個(gè)柔性的、重復(fù)的過(guò)程。每次作用的區(qū)域小,在相應(yīng)的作業(yè)區(qū)間,曲坯受揉擠和搓壓的共同作用,使得曲坯松而不散,密而不實(shí),內(nèi)部均勻,通透性好。經(jīng)過(guò)連續(xù)的踩揉及搓壓,達(dá)到理想的提漿的效果。而機(jī)械制曲在曲坯成型方面,主要是通過(guò)將曲料壓于模具內(nèi),模具由下層槽和上層壓板組成,能夠促進(jìn)快速成形,機(jī)械制曲的方式大大節(jié)省了勞動(dòng)強(qiáng)度,提高了生產(chǎn)率,實(shí)現(xiàn)了制曲的規(guī)模化。
隨著社會(huì)對(duì)優(yōu)質(zhì)白酒的需求的增加,既要保證釀制優(yōu)質(zhì)酒,又要保證優(yōu)質(zhì)白酒的市場(chǎng)需求。促使著制曲從單一的機(jī)械化向智能化發(fā)展。踩曲釀酒工藝為我國(guó)傳統(tǒng)獨(dú)特的釀酒工藝,國(guó)外無(wú)此釀酒工藝的相關(guān)研究,國(guó)內(nèi)外關(guān)于仿生踩曲領(lǐng)域還沒(méi)有較為成熟相關(guān)方面研究。因此,基于動(dòng)作捕捉技術(shù)提取人工踩曲關(guān)鍵動(dòng)作數(shù)據(jù),該運(yùn)動(dòng)數(shù)據(jù)為設(shè)計(jì)仿生壓曲機(jī)構(gòu)直接提供了較為真實(shí)的人體運(yùn)動(dòng)參數(shù),對(duì)白酒行業(yè)仿生壓曲機(jī)構(gòu)的研究有著重要意義。
2 動(dòng)作捕捉技術(shù)的仿生壓曲關(guān)鍵特征模型
2.1 模型設(shè)計(jì)方法
模型設(shè)計(jì)方法如圖1所示,人工踩曲動(dòng)作的運(yùn)動(dòng)數(shù)據(jù)的獲取,需要表演者穿上緊身的特制服裝,把高亮反光標(biāo)記球粘貼于表演者的關(guān)鍵部位。踩曲表演者定標(biāo)后,反光球在關(guān)照作用下反射出各個(gè)角度的近紅外線并被相機(jī)捕捉和識(shí)別,通過(guò)圖像識(shí)別算法得到相關(guān)的動(dòng)作二維信息,每個(gè)角度的二維信息組合起來(lái)并與相機(jī)參數(shù)的標(biāo)定結(jié)合,重建了人工踩曲的空間三維運(yùn)動(dòng)信息,即人工踩曲的動(dòng)作數(shù)據(jù)。將得到的動(dòng)作數(shù)據(jù)導(dǎo)入相關(guān)三維人體模型生成軟件中,將標(biāo)記點(diǎn)的運(yùn)動(dòng)數(shù)據(jù)轉(zhuǎn)換為人體模型的運(yùn)動(dòng)數(shù)據(jù)信息,實(shí)現(xiàn)動(dòng)作數(shù)據(jù)驅(qū)動(dòng)三維角色模型。對(duì)人工踩曲動(dòng)作捕捉數(shù)據(jù)進(jìn)行運(yùn)動(dòng)分析,研究踩曲關(guān)鍵動(dòng)作的運(yùn)動(dòng)規(guī)律,獲得運(yùn)動(dòng)學(xué)數(shù)據(jù)為仿生壓曲機(jī)構(gòu)的設(shè)計(jì)研究提供重要的理論依據(jù)。
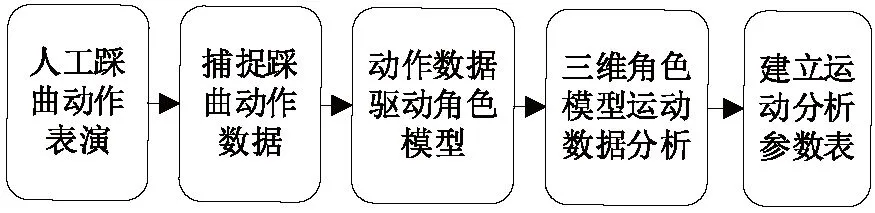
圖1 仿生壓曲三維模型設(shè)計(jì)方法
2.2 動(dòng)作捕捉技術(shù)及踩曲運(yùn)動(dòng)分析
2.2.1光學(xué)式動(dòng)作捕捉
動(dòng)作捕捉技術(shù)是記錄真正實(shí)體運(yùn)動(dòng)的一項(xiàng)數(shù)字化技術(shù),通常用于人體運(yùn)動(dòng)。動(dòng)作捕捉的關(guān)鍵技術(shù)有相機(jī)的標(biāo)定、標(biāo)記點(diǎn)的跟蹤及三維重建。現(xiàn)有動(dòng)作捕捉技術(shù)主要有以下四種:光學(xué)式運(yùn)動(dòng)捕捉系統(tǒng)、機(jī)械式運(yùn)動(dòng)捕捉系統(tǒng)、電磁式動(dòng)作捕捉系統(tǒng)和聲波式動(dòng)作捕捉系統(tǒng)[6]。
光學(xué)跟蹤方法是基于計(jì)算機(jī)視覺(jué)原理和圖像處理。其工作原理為:如果一個(gè)點(diǎn)可以同時(shí)被兩個(gè)攝像頭,我們可以決定空間點(diǎn)的位置。如果攝像機(jī)捕獲連續(xù)的圖像,我們可以從圖像序列中獲得具有圖像識(shí)別和圖像處理技術(shù)的點(diǎn)的軌跡。
使用運(yùn)動(dòng)捕獲數(shù)據(jù)的優(yōu)點(diǎn)是能以非常高的細(xì)節(jié)水平為所有自由度提供運(yùn)動(dòng)數(shù)據(jù)。動(dòng)作捕捉數(shù)據(jù)包括兩個(gè)部分:原始動(dòng)作數(shù)據(jù)的處理及完整純凈動(dòng)作數(shù)據(jù)處理。動(dòng)作捕捉原始數(shù)據(jù)的特點(diǎn)有:僅有標(biāo)記點(diǎn)的三維坐標(biāo)信息且所存的數(shù)據(jù)雜亂無(wú)序;標(biāo)記特征點(diǎn)可能存在被遮擋未能重建、重建不準(zhǔn)確或錯(cuò)誤識(shí)別的情況;拍攝延遲;運(yùn)動(dòng)過(guò)大,導(dǎo)致標(biāo)記點(diǎn)相對(duì)人體出現(xiàn)位移[7]。因此必須通過(guò)數(shù)據(jù)處理將提取到的人體運(yùn)動(dòng)原始數(shù)據(jù)進(jìn)行數(shù)據(jù)去噪、散亂數(shù)據(jù)匹配、缺失數(shù)據(jù)修補(bǔ)及關(guān)鍵幀提取。完整純凈動(dòng)作數(shù)據(jù)則進(jìn)行關(guān)鍵幀提取、數(shù)據(jù)檢索、數(shù)據(jù)分割、數(shù)據(jù)重構(gòu)、數(shù)據(jù)重用等處理[8]。光學(xué)式動(dòng)作數(shù)據(jù)處理模塊如圖2所示。
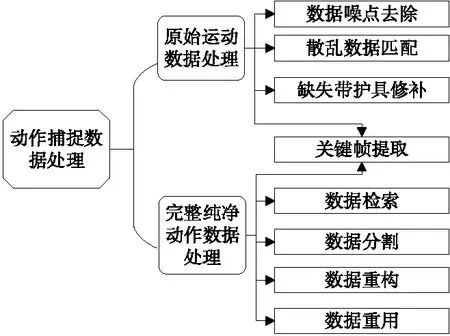
圖2 光學(xué)式動(dòng)作數(shù)據(jù)處理模塊
2.2.2踩曲運(yùn)動(dòng)分析
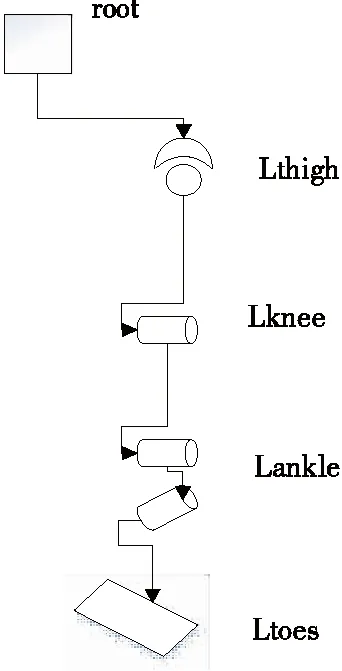
圖3 左下肢自由度分布
踩曲過(guò)程主要是人體的下肢運(yùn)動(dòng)完成,對(duì)踩曲過(guò)程中人體下肢運(yùn)動(dòng)進(jìn)行研究。分析踩曲關(guān)鍵動(dòng)作各關(guān)節(jié)角度的變化、力矩變化,揭示人工踩曲運(yùn)動(dòng)機(jī)理,將為仿生壓曲機(jī)構(gòu)的設(shè)計(jì)提供重要的依據(jù)[9]。通過(guò)動(dòng)作捕捉系統(tǒng)得到標(biāo)記點(diǎn)的位置坐標(biāo),可計(jì)算人工踩曲運(yùn)動(dòng)過(guò)程中的運(yùn)動(dòng)學(xué)結(jié)果,即各關(guān)節(jié)的角度變化及下肢各部分的加速度。人體下肢運(yùn)動(dòng)鏈主要包括根關(guān)節(jié)、股關(guān)節(jié)、膝關(guān)節(jié)、踝關(guān)節(jié)及腳掌各關(guān)節(jié)。人工踩曲運(yùn)動(dòng)過(guò)程中,腳掌各關(guān)節(jié)的運(yùn)動(dòng)影響較小,因此腳掌視為一個(gè)關(guān)節(jié)點(diǎn)[10]。通過(guò)分析人工踩曲關(guān)鍵關(guān)節(jié)運(yùn)動(dòng)特征,單肢運(yùn)動(dòng)自由度為6,如圖3所示Lthigh相對(duì)于有3個(gè)自由度,Lknee有1個(gè)自由度,Lankle有2個(gè)自由度。
3 實(shí)驗(yàn)分析
3.1 踩曲運(yùn)動(dòng)實(shí)驗(yàn)方法
人工踩曲表演者于光學(xué)式動(dòng)作捕捉系統(tǒng)中進(jìn)行踩曲動(dòng)作捕捉,獲取人體運(yùn)動(dòng)相關(guān)數(shù)據(jù)。實(shí)驗(yàn)的光學(xué)式動(dòng)作捕捉系統(tǒng)分布于尺寸為8m×8m×2.5m的場(chǎng)地。采用天花板固定鋼架作為支撐安裝動(dòng)作捕捉鏡頭,16個(gè)動(dòng)捕鏡頭均勻分布于鋼架的各邊。本實(shí)驗(yàn)采用38個(gè)標(biāo)記點(diǎn)對(duì)表演者進(jìn)行標(biāo)記,以60幀/s的速率記錄標(biāo)記點(diǎn)的空間坐標(biāo)信息,見(jiàn)圖4。
動(dòng)作捕捉系統(tǒng)主要由以下各部分組成:①動(dòng)作捕捉鏡頭:由高速高分辨率相機(jī),近紅外LED環(huán)形燈和近紅外濾光片組成;環(huán)繞鏡頭周圍的LED環(huán)形燈發(fā)出近紅外光線,由運(yùn)動(dòng)物體上的高亮反光標(biāo)記球反射進(jìn)入鏡頭成像,并通過(guò)近紅外濾光片過(guò)濾可見(jiàn)光以排除環(huán)境中可見(jiàn)光的干擾,形成清晰記錄標(biāo)記球運(yùn)動(dòng)軌跡的圖像序列。②數(shù)字交換機(jī):將圖像進(jìn)行數(shù)字編碼,實(shí)現(xiàn)各相機(jī)圖像間的精確同步控制,并通過(guò)千兆以太網(wǎng)數(shù)字傳輸至工作站進(jìn)行數(shù)據(jù)處理。③同步控制器:精確控制各相機(jī)的同步采集。④標(biāo)定工具套裝:用于系統(tǒng)定標(biāo)。⑤高亮反光標(biāo)記球:粘貼于被測(cè)物體的關(guān)鍵部位,反射近紅外光線并被相機(jī)捕捉和識(shí)別。⑥動(dòng)作捕捉特制套裝:用于標(biāo)記球與人體的固定粘貼。⑦3DMoCap動(dòng)作捕捉軟件:用于采集、跟蹤、處理運(yùn)動(dòng)數(shù)據(jù)。⑧工作站:具備四核2.8GHz 以上CPU,8G內(nèi)存,Intel Pro/1000千兆網(wǎng)卡,顯卡顯存1G,3D滾輪鼠標(biāo),Microsoft WindowsXP操作系統(tǒng)。
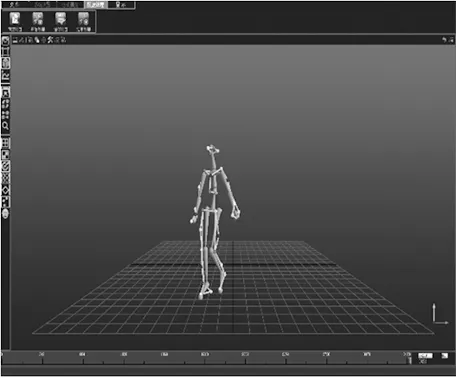
圖4 三維動(dòng)作捕捉棍棒圖
3.2 人體模型的建立與運(yùn)動(dòng)數(shù)據(jù)分析
通過(guò)光學(xué)式動(dòng)作捕捉系統(tǒng)采集到的是踩曲運(yùn)動(dòng)標(biāo)記點(diǎn)的空間坐標(biāo),不能準(zhǔn)確反映各個(gè)關(guān)節(jié)的空間位置。需要運(yùn)動(dòng)重定向技術(shù)將采集到的踩曲動(dòng)作映射到三維人體模型中,輸出包含人體骨骼與肢體關(guān)節(jié)運(yùn)動(dòng)數(shù)據(jù)的BVH數(shù)據(jù),實(shí)現(xiàn)人工踩曲空間位置信息和三維動(dòng)畫(huà)人體模型的運(yùn)動(dòng)數(shù)據(jù)信息的轉(zhuǎn)換。如圖5為踩曲運(yùn)動(dòng)數(shù)據(jù)到人體三維簡(jiǎn)化模型的映射。
BVH文件的運(yùn)動(dòng)數(shù)據(jù)是子關(guān)節(jié)相對(duì)于父關(guān)節(jié)局部坐標(biāo)系的旋轉(zhuǎn)角度的數(shù)據(jù)信息,需要將數(shù)據(jù)轉(zhuǎn)換為各關(guān)節(jié)點(diǎn)的絕對(duì)空間坐標(biāo)信息[11]。
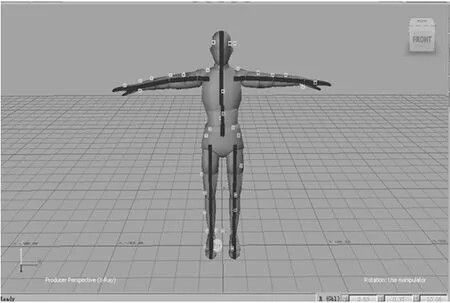
圖5 人體三維簡(jiǎn)化模型
子關(guān)節(jié)可由其父關(guān)節(jié)的坐標(biāo)及旋轉(zhuǎn)信息進(jìn)行求解[12]。求解公式(1)如下:
P(x,y,z)=POFFSETR#+Pparent(x,y,z)
(1)
R#其中兄為父節(jié)點(diǎn)及以上節(jié)點(diǎn)的旋轉(zhuǎn)矩陣,POFFSET為關(guān)節(jié)偏移量,Pparent(x,y,z)為父節(jié)點(diǎn)關(guān)節(jié)坐標(biāo)。子關(guān)節(jié)相對(duì)于父關(guān)節(jié)的旋轉(zhuǎn)矩陣如下公式所示:
(2)
式中,α、β、γ分別表示繞Z、X、Y軸的旋轉(zhuǎn)角度。轉(zhuǎn)換后各關(guān)節(jié)點(diǎn)的絕對(duì)空間坐標(biāo)信息數(shù)據(jù)可得到各關(guān)節(jié)點(diǎn)的運(yùn)動(dòng)軌跡變化。例如圖6所示為knee點(diǎn)的運(yùn)動(dòng)軌跡。圖6a為knee點(diǎn)的空間三維運(yùn)動(dòng)軌跡,表明了人工踩曲一個(gè)完整踩制的運(yùn)動(dòng)周期、軌跡的變化趨勢(shì),圖6b為knee點(diǎn)隨時(shí)間變化沿Z軸的變化可得出在不同坐標(biāo)軸上的運(yùn)功變化范圍,將這些變化范圍轉(zhuǎn)化為各關(guān)節(jié)角變化范圍,將為仿生壓曲機(jī)構(gòu)的仿人工踩曲運(yùn)動(dòng)提供重要參數(shù)依據(jù)。
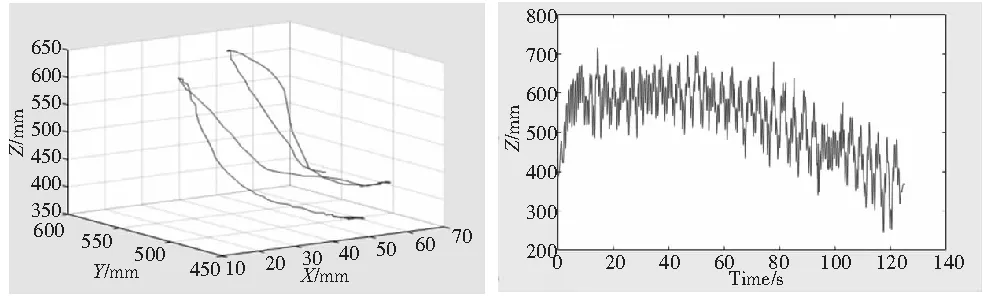
(a)knee點(diǎn)的運(yùn)動(dòng)軌跡 (b)knee點(diǎn)隨時(shí)間變化在Z軸變化圖6 knee點(diǎn)運(yùn)動(dòng)變化
4 結(jié)束語(yǔ)
動(dòng)作捕捉數(shù)據(jù)被廣泛的用于多個(gè)領(lǐng)域。通過(guò)人類運(yùn)動(dòng)數(shù)據(jù)的學(xué)習(xí)、模仿,復(fù)制和再造生物系統(tǒng)結(jié)構(gòu)、功能、工作原理,將其應(yīng)用到改進(jìn)現(xiàn)有的或創(chuàng)新的機(jī)械結(jié)構(gòu)中,這很大程度上幫助了將捕捉動(dòng)作用于仿生機(jī)械設(shè)計(jì)中。動(dòng)作捕捉數(shù)據(jù)的分析能夠更好的理解和描述運(yùn)動(dòng)過(guò)程,跟蹤分析人工踩曲過(guò)程中相關(guān)關(guān)節(jié)的運(yùn)動(dòng),對(duì)建立仿生壓曲機(jī)構(gòu)的幾何模型、解析仿生壓曲機(jī)構(gòu)的運(yùn)動(dòng)規(guī)律從而提高它的仿生性有著重要的意義,為機(jī)械結(jié)構(gòu)的仿生壓曲機(jī)構(gòu)設(shè)計(jì)提供重要依據(jù)。本文基于動(dòng)作捕捉技術(shù)提取人工踩曲的關(guān)鍵動(dòng)作數(shù)據(jù),經(jīng)過(guò)數(shù)據(jù)處理將踩曲動(dòng)作空間位置信息轉(zhuǎn)換三維角色模型運(yùn)動(dòng)數(shù)據(jù)信息。下一步將基于人工踩曲關(guān)鍵動(dòng)作運(yùn)動(dòng)規(guī)律研發(fā)仿生壓曲機(jī)構(gòu)。
[參考文獻(xiàn)]
[1] 付捷, 王瑛, 羅鋼. 一種新型酒廠制曲壓塊機(jī)[J]. 包裝與食品機(jī)械, 2006, 24(4):46-47.
[2] 李瑞. 汾酒用曲塊制作機(jī)理及其關(guān)鍵技術(shù)研究[D]. 太原:太原理工大學(xué), 2011.
[3] 張靜. 多點(diǎn)采壓壓曲機(jī)設(shè)計(jì)及其關(guān)鍵結(jié)構(gòu)件仿真研究[D]. 太原:太原理工大學(xué), 2009.
[4] 林培, 章肇敏, 吳生文,等. 人工踩曲與機(jī)械制曲對(duì)大曲培養(yǎng)的差異性分析[J]. 釀酒科技, 2012(4):70-71,75.
[5] 梁雪梅. 基于運(yùn)動(dòng)捕捉數(shù)據(jù)的拉班舞譜生成[D]. 北京:北京交通大學(xué), 2015.
[6] 劉幸奇. 基于運(yùn)動(dòng)捕捉數(shù)據(jù)的人體運(yùn)動(dòng)合成[D]. 北京:北京交通大學(xué), 2010.
[7] 吳升, 張強(qiáng), 肖伯祥,等. 一種新的光學(xué)運(yùn)動(dòng)捕捉數(shù)據(jù)處理方法[J]. 計(jì)算機(jī)應(yīng)用研究, 2009, 26(5):1938-1940.
[8] 李青. 光學(xué)式人體運(yùn)動(dòng)捕捉數(shù)據(jù)處理研究[D]. 西安:西北大學(xué), 2015.
[9] 韓亞麗, 趙國(guó)平, 高海濤,等. 面向助力機(jī)器人設(shè)計(jì)的人體負(fù)重樓梯行走下肢運(yùn)動(dòng)研究[J]. 中國(guó)機(jī)械工程, 2013, 24(22):3090-3095.
[10] 梁豐, 張志利, 李向陽(yáng),等. 基于光學(xué)運(yùn)動(dòng)捕捉數(shù)據(jù)的虛擬人下肢運(yùn)動(dòng)控制方法[J]. 系統(tǒng)仿真學(xué)報(bào), 2015, 27(2):327-335.
[11] 張利格, 畢樹(shù)生, 高金磊. 仿人機(jī)器人復(fù)雜動(dòng)作設(shè)計(jì)中人體運(yùn)動(dòng)數(shù)據(jù)提取及分析方法[J]. Acta Automatica Sinica, 2010, 36(1):107-112.
[12] 劉瑞. 運(yùn)動(dòng)捕捉數(shù)據(jù)智能處理算法研究及應(yīng)用[D]. 大連:大連理工大學(xué), 2012.
(編輯李秀敏)
猜你喜歡
作文周刊·小學(xué)一年級(jí)版(2022年16期)2022-05-07 11:28:30
作文周刊·小學(xué)一年級(jí)版(2021年8期)2021-07-07 11:00:47
動(dòng)漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級(jí)版(2016年28期)2017-06-03 00:28:49
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語(yǔ)文·低年級(jí)(2014年10期)2015-01-14 14:46:27